電控汽油噴油器開啟延遲時間檢測方法研究
2021-12-29 10:20:06謝宏斌蔣兆杰劉軒銘高崴楊世杰畢仕強
車用發動機 2021年6期
關鍵詞:檢測
謝宏斌,蔣兆杰,劉軒銘,高崴,楊世杰,畢仕強
(1.無錫職業技術學院汽車與交通學院,江蘇 無錫 214121;2.中國第一汽車股份有限公司無錫油泵油嘴研究所,江蘇 無錫 214063)
電控汽油噴油器是汽油發動機系統中非常重要的部件,它接受電子控制單元的控制脈寬,精確計量噴油量并將其霧化噴射到燃燒室內。噴油器是通過高速電磁閥實現噴射控制的,因此,電磁閥的性能直接影響噴油器的響應速度和控制精度,是噴油器總成的核心元件。
在電磁閥開啟過程中,從發出驅動命令到噴油器完全開啟存在滯后現象。滯后的原因主要是受電磁閥密封偶件的配合精度、流體黏性阻力、電磁鐵特性變化等因素的影響。因此,同型號不同噴油器,由于制造、裝配以及應用環境的差異,會導致不同噴油器在相同驅動脈寬作用下,因滯后時間不同造成實際噴油持續時間不同,導致噴油量出現偏差。甚至是對于同一個噴油器,由于長期使用、電磁閥老化以及應用環境條件的改變也會導致噴油量出現偏差。特別是在小油量工況下,偏差可能更大。為減小這種偏差,可以通過實時檢測電磁閥的實際開啟時刻,并以此為依據對噴射驅動脈寬進行實時修正。為此,需要尋找并提取電磁閥完全開啟時的特征信號,文獻[1-4]研究表明,當電磁閥完全開啟時,驅動電流會產生拐點。通過檢測該拐點的生成時刻即可得到電磁閥實際開啟時刻。
唐超等[1]采用高速AD采樣的辦法,實時采集驅動電流的數據,測控軟件基于該數據描繪出電流曲線,通過觀測電流曲線來確定噴油器實際開啟時刻的區間。這種方法在維修檢測和出廠品質檢測時非常適用,但這種技術很難集成到電控單元中。陳林等[2]也使用高速AD采樣的辦法,并基于采集的數據,采用濾波、防抖算法來求取電流拐點的生成時刻。該方法需要高頻采集電流數據,并設計復雜的抗干擾算法,來保證采集數據的準確性,還需設計防抖算法確保電流拐點生成時刻的準確性。需占用大量CPU資源,影響軟件運行的穩定性,增加設計成本。
文獻[3-8]均使用了微分電路來檢測電流拐點的生成時刻,微分電路結構簡單,成本較低,已經成為目前使用的主流方法,但該方法也存在較大的局限性。為解決現存方法的弊端,本研究提出了一種新型汽油電控噴油器開啟延遲時間的檢測方法,該方法取消微分電路,構建一種動態比較電路,該電路的閾值可在線漸進逼近電流拐點,能在電流拐點生成時刻可靠地觸發窄脈沖。應用該方法可提高噴油器開啟延遲時間檢測的可靠性和精確性。
1 電控噴油器運動過程分析
圖1示出典型的汽油電控噴油器電磁閥結構[9]。電磁閥主要由鐵芯、導磁片、線圈、銜鐵組件(包括銜鐵和鋼球)、導向管等組成。其工作過程包括以下三個階段:

圖1 電控噴油器電磁閥結構示意
1) 關閉狀態。電磁閥內部設置一組電磁線圈,并且將噴油器頭部閥芯和銜鐵整合成一體,構成閥體運動組件。當噴射過程未開始時,彈簧力和燃油壓力將閥體壓在閥座上,此時處在關閉狀態。
2) 開啟過程。當線圈通電后,銜鐵所受的電磁力迅速增大,當電磁力大于摩擦力、燃油壓力和彈簧力后,銜鐵開始升起,燃油即從噴口流出,隨即導致噴口處產生壓降,引起壓力波動,噴油器內的燃油流動并不穩定。當銜鐵上升碰到限位平面后會有小幅反彈振動現象,最終被電磁力吸牢在限位平面上,此后噴油器內燃油流動保持穩定,噴油量和時間呈線性關系。
3) 關閉過程。當電磁閥線圈斷電后,銜鐵受到的電磁力迅速下降,當電磁力小于彈簧力及附加阻力時,銜鐵在彈簧力作用下開始下行,同時導致噴口處壓力升高,進而產生壓力波動,噴油器內燃油再次出現不穩定流動,銜鐵碰到閥座經反彈后被彈簧力壓牢在底座上,從而完成了一次噴油過程。
2 電磁閥銜鐵吸合時電流拐點產生的原因和條件
電磁閥開啟過程是指從噴油器被施加驅動電壓到噴油器電磁閥銜鐵完全吸合這一動態過程。在這一過程中,噴油器電磁閥的電路和磁路均發生了一系列的變化,下面就這一過程進行理論分析[10]。
電磁閥的等效磁路圖見圖2。圖中Φ為電磁閥磁通,I為電磁閥線圈的電流,N為線圈匝數,Rm為磁路總磁阻。
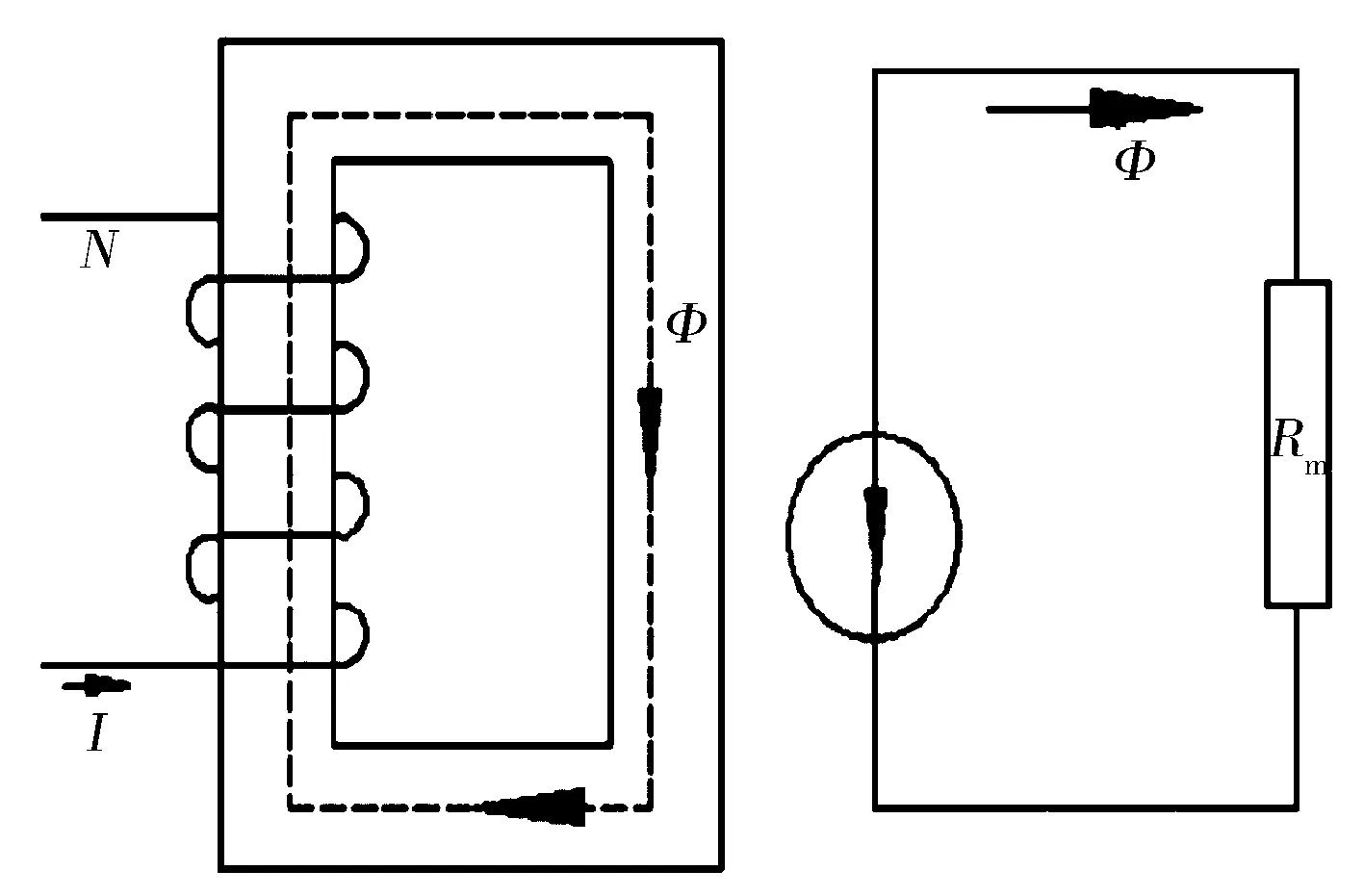
圖2 噴油器電磁閥的等效磁路圖
如上圖所示,在噴油器電磁閥的等效磁路中,若忽略磁漏時有如下公式:
ΦRm=NI。
(1)
噴油器電磁閥工作時的等效電路見圖3。
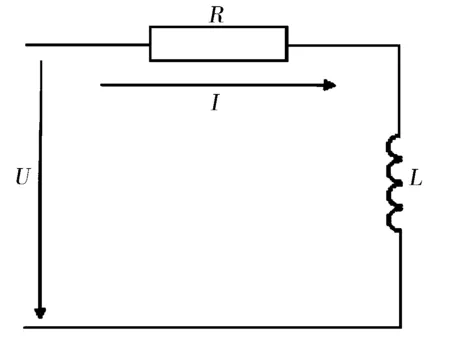
圖3 噴油器電磁閥的等效電路圖
如圖3所示,在噴油器電磁閥的等效電路中設整個電路的導通電阻為R,則整個回路的電壓方程如下:
(2)
式中:U為電磁鐵兩端的驅動電壓;Φ為電磁鐵的等效磁通。結合式(1)與式(2)可得:
(3)
由式(3)可得電磁閥驅動電流變化率的表達式:
(4)

(5)
設

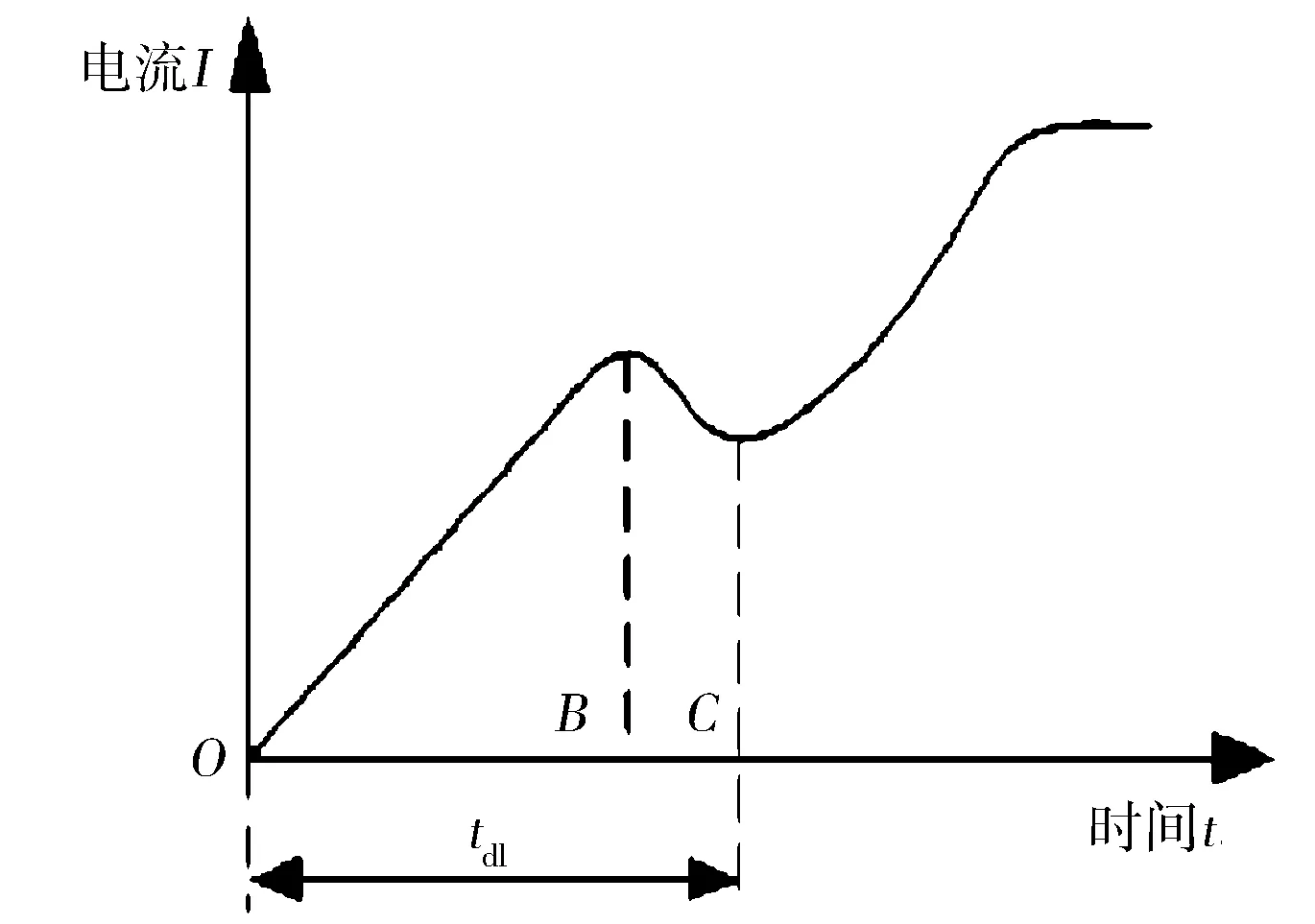
圖4 噴油器電磁閥開啟過程電流波形圖
圖4中B,C兩個電流拐點分別對應于銜鐵運動始點和吸合點。銜鐵吸合點即是噴油器完全開啟點。tdl就是噴油器實際完全開啟的延遲時間。
3 微分檢測電路的誤差分析
文獻[3-8]介紹的檢測方法均是以微分電路為核心構建的,如圖5所示。
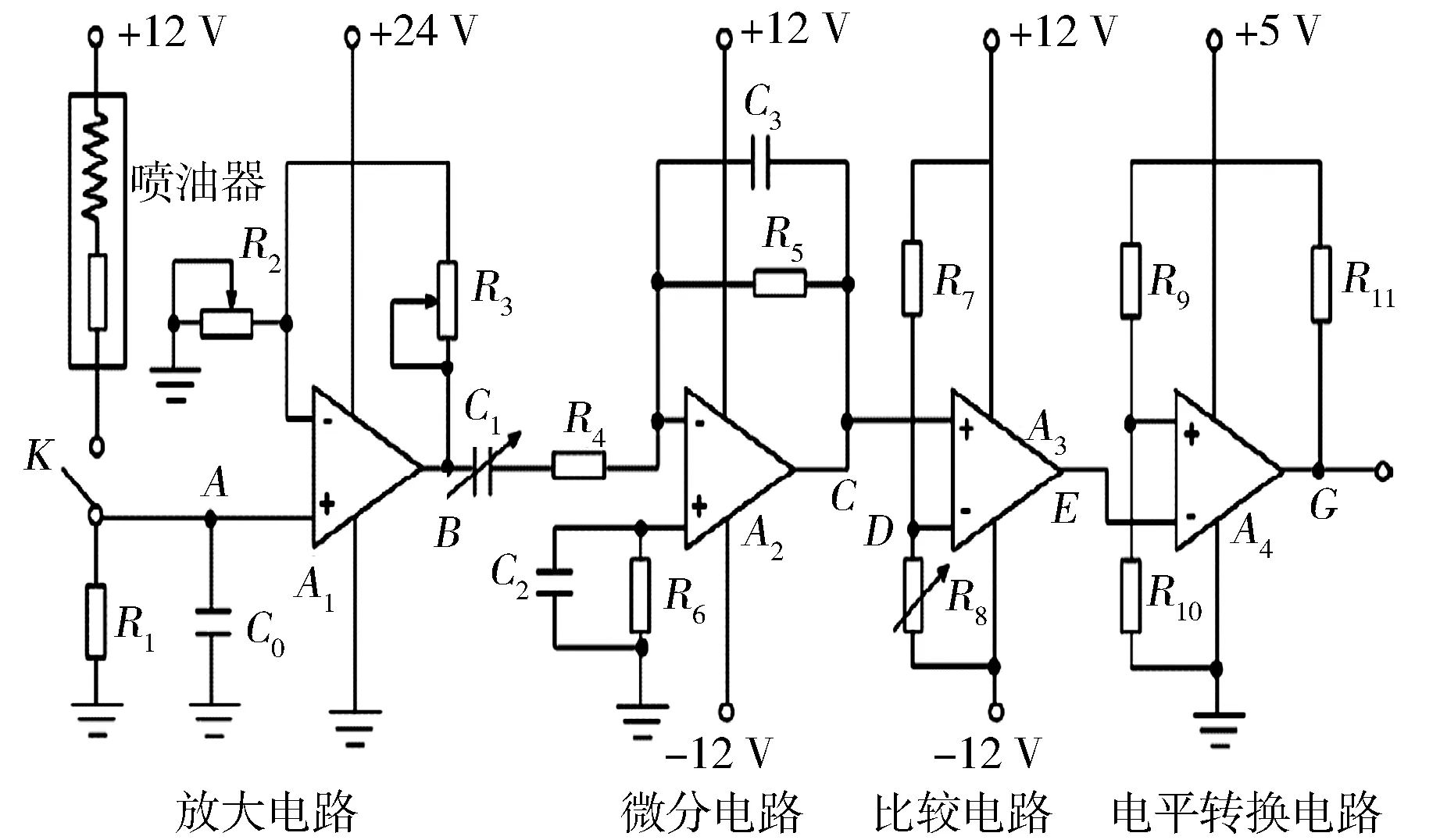
圖5 基于微分電路的開啟點檢測電路
由圖6可見,在噴油器開啟(C點)時刻,檢測電路會輸出一個脈沖M,單片機計算該脈沖相對于驅動起始時刻的延遲時間,從而得到噴油器實際的開啟時刻,即圖6中的S脈沖的上升沿和C點觸發脈沖M中線的時間差值T。計算時,單片機捕獲S脈沖上升沿和觸發脈沖M上升沿的時間差值TD,然后再捕獲M脈沖的脈寬值TM。即
(6)
圖6示出了開啟時刻驅動電流波形和微分檢測電路輸出波形的對應關系。在銜鐵開始運動時刻(B點)和銜鐵完全吸合時刻(C點),即噴油器實際開啟時刻,微分檢測電路會輸出2個尖峰。比較器電路在負尖峰的時刻產生觸發脈沖M。
圖6 不同比較器閾值對微分檢測電路輸出的影響
當比較器取不同的閾值時(分別取Ⅰ,Ⅱ,Ⅲ),檢測電路會產生不同脈寬的觸發脈沖,如圖6中(1)、(2)、(3)所示。當取閾值I的時候,生成的觸發脈沖很窄,取閾值Ⅱ,Ⅲ時會生成較寬的觸發脈沖。由圖6中(3)可以看出,噴油器開啟點C并不是觸發脈沖M的中點,即T1和T2的值并不相等。由式(6)可以看出,要想提高檢測誤差需要降低觸發脈寬的值,因此比較電路的閾值需要恰到好處,要和噴油器的參數高度匹配。實際應用中噴油器電磁閥的阻抗參數總是存在一定的差異,因此,每只噴油器驅動電流波形在開啟點前后的電流斜率并不完全相同,會存在一定的差異(見圖7)。圖7比較了2個噴油器的驅動波形,它們的電流波形在完全開啟點(C,C’)前的斜率(BC和B’C’)和開啟點后的斜率(CD和C’D’)有一定的差異。虛線所示噴油器在開啟點前后的斜率都要大于實線所示噴油器。因此虛線所示噴油器的微分檢測電路輸出信號在開啟點C’的電壓值要大于實線所示噴油器開啟點C的電壓值,如圖7中微分電路輸出波形的C,C’點。

圖7 驅動電流波形差異對比較器閾值取值的影響
當比較電路取閾值Ⅱ時,實線所示噴油器的觸發脈沖為M2,虛線所示噴油器的觸發脈沖為M3。M2和M3的脈寬都很大,由前文的分析可知,此時的檢測結果精度較低,當比較電路取閾值Ⅰ時,虛線所示噴油器的觸發脈沖較小,此時對該噴油器的測量精度較高,但對于實線所示的噴油器而言,此時不能生成觸發脈沖,無法完成測量。因此微分檢測電路的方法對于參數的設置非常苛刻,比較電路閾值的設置尤其關鍵,如一味強調測量的精度,使得觸發脈沖的脈寬處于較小范圍,則有可能會導致一些噴油器不能生成觸發脈沖,不能進行測量。如果將比較電路的閾值設置得較低,使得噴油器都能產生觸發脈沖,則測量的精度不能保證,因此這種方法存在一定的局限性。而且即使是同一個噴油器,使用時間長了,也可能出現電磁閥參數變化的情況,影響到微分電路的輸出,進而影響到比較電路的輸出,導致檢測精度下降。
另外構成微分電路的R,C參數非常關鍵,由圖5的電路可知微分電路的輸出電壓[11]為
(7)
在實際的應用中,電阻要使用萬分之一精度的高精度電阻,電容也要用NPO級別的高品級電容,以便抑制溫漂的不利影響。因此電路的設計成本也較高。
汽車電控單元的使用環境非常惡劣,檢測電路的輸入信號極可能受到干擾,產生一些雜散毛刺信號,這些信號會讓微分電路產生假信號,干擾檢測結果,嚴重時無法檢測。為了抑制這些假信號,需要加入軟件濾波算法,這也增加了設計成本。因此基于微分電路的檢測電路在實際應用中存在一定的局限性,設計成本也較高,為此本研究提出了一種更加實用的檢測方法。
4 新型檢測電路的工作原理
4.1 電路結構
新型檢測電路結構見圖8,該結構主要由DA轉換電路、信號放大電路、比較電路、CPLD、MCU組成。MCU通過SPI口在線調節DA轉換電路改變輸出電壓值,然后通過比較電路觸發生成相關的脈沖。CPLD的作用是處理檢測電路生成的觸發脈沖,得到可檢測開啟時間的脈沖。
圖8 新型檢測電路的結構
4.2 電路工作原理
每次驅動前,MCU通過SPI接口在線調節DA轉換電路的輸出值,由于驅動波形存在2個電流拐點,即前述的B點和C點,因此檢測電路有2個DA轉換電路,DA1的值用來觸發電流拐點B,DA2的值用來觸發電流拐點C。在開始檢測時,分別設置DA轉換電路的初始值(見圖9),在噴油器運行的一段時間內,MCU調節DA輸出值,按照一定的步長逼近電流拐點。即DA1是從大到小逐漸逼近,DA2是從小到大逐漸逼近。當DA值接近電流拐點的電壓值時比較電路會產生小脈沖,這個小脈沖的觸發時刻以及脈寬是檢測開啟點時間的關鍵變量。但產生小脈沖的同時,也會同時產生不需要的脈沖。如圖9所示,當DA1值接近電流拐點B時,將產生一個小脈沖,但也會從F點開始產生一個長脈寬脈沖。B點實際觸發脈沖除了對檢測有用的小脈沖外,但也會產生一個無用的長脈寬脈沖,為此需要通過CPLD對無用信號進行過濾,以提高檢測的準確性。本研究引入DA1比較使能信號來過濾B點實際觸發脈沖,即只在使能信號的有效脈寬內,使得B點實際觸發脈沖有效,不在有效脈寬內無效,這樣就能從B點實際觸發脈沖中過濾掉無用脈沖,只保留對檢測有用的脈沖。對于C點來說也設計DA2比較使能信號,來過濾C點實際觸發脈沖中的無用脈沖信號。

圖9 檢測信號相位圖a
由于DA1的逼近是從大到小逐漸逼近,在設置DA1使能信號的脈寬時可以按照如下的原則:當生成小脈沖之后,從F點開始,B點實際觸發脈沖將生成一個無用的長脈寬脈沖,只要設置DA1比較使能信號從起始時刻開始,在F點之前結束即可,即DA1比較使能信號的脈寬TDA1小于TB。同理DA2的逼近是從小到大的逼近,在觸發生成小脈沖之前,C點實際觸發脈沖從起始時刻到E點生成一個無用觸發脈沖,設置DA2比較使能信號的起始時刻大于E點即可,即DA2比較使能信號的起始時刻延遲值TDA2要大于TC。整個過程觸發脈沖生成的相位關系見圖9。
當DA2的值非常接近拐點C的電壓值時會在C點觸發生成小脈沖,但是在C點之前,從起始時刻開始就會生成無效的脈沖,直到E點結束。同理,當DA1的值非常接近拐點B的電壓值時,會在B點觸發生成小脈沖,之后從F點開始生成無用的脈沖。如果CPLD邏輯使能信號晚于E點開始,早于F點結束,即在取值窗口內就可濾掉B,C點的觸發脈沖中的無效信號,這樣只需一個使能窗口信號就可以滿足要求(見圖10)。實際CPLD邏輯使能信號的起止邊界應根據不同型號噴油器確定。

圖10 檢測信號相位圖b
圖10示出實際關鍵檢測信號的相位圖。B,C點觸發脈沖均是經過CPLD濾掉無用脈沖的信號。B點觸發的小脈沖信號的中點,可表示電磁閥銜鐵開始運動的時刻,如果小脈沖的脈寬足夠小,則銜鐵運動起始時刻就足夠精確。C點觸發的小脈沖信號的中點,可表示電磁閥銜鐵完全吸合時刻,即噴油器開啟時刻,只要這個脈沖脈寬足夠小,噴油器的開啟時刻就足夠精確。
CPLD根據這2個輸入信號的上升沿合成銜鐵運動時間脈沖,通過檢測該脈沖的脈寬以及B,C點的觸發脈沖脈寬就能得到電磁閥銜鐵的運動時間T3,即
T3=t3+Δt1/2-Δt2/2。
(8)
只要能將生成的觸發脈沖脈寬控制在很小的值,檢測的結果就比較精確。
CPLD根據電流拐點C生成的觸發脈沖以及驅動使能信號生成噴油器開啟延時脈沖,通過檢測該脈沖脈寬的長度時間t1以及C點觸發脈沖脈寬來確定噴油器開啟延遲時間T4,即
T4=t1+Δt1/2。
(9)
觸發脈沖的生成是個漸進過程,也就是說觸發脈沖是在噴油器正常運行時,經過N個驅動周期后,通過在線逐漸調節DA的值,使之逐漸逼近產生電流拐點時的電壓值,直到生成滿足測量要求的小脈沖為止,在每個驅動周期內DA的值是不變的,每次驅動結束后,根據判斷條件來決定下個周期DA值如何調節。整個流程需要按照一定的邏輯來進行。該邏輯的流程圖見圖11。當生成滿足要求的測量脈沖后,本次測量過程結束,此時需要重新將DA值重置到初始狀態,為下一次的測量做準備。
圖11 檢測邏輯流程圖
當檢測電流拐點C時,DA2的值是由小到大逼近電流拐點的電壓值,相應的邏輯流程應為先逐漸增加步長,當累計的電壓值超過電流拐點電壓值太多時,此時生成的脈沖的脈寬值可能會超過設定的脈寬值M,此時按照一定的步長再減少DA2值。當檢測電流拐點B時,DA1的值是由大到小逼近電流拐點的電壓值,對應于圖11中括號里的情況,DA1值的增減邏輯和DA2值相反。
5 試驗驗證與分析
為了驗證本研究提出方法的有效性和準確性,采用Polytec的單點式激光測振儀來驗證電磁閥開啟階段銜鐵運動的起始、結束時刻。該設備通過光學頭發出一束激光照射到目標上,同時接收目標反射回的激光,產生激光干涉多普勒效應。控制器以此物理現象為依據進行內部運算處理,得到被測目標的位移和速度。該設備可準確測量噴油器銜鐵的運動位移。
該設備測量的最小位移可達0.4 μm,汽油電控汽油噴油器的工作氣隙[12]一般在40~100 μm,其測量精度在1%到0.4%之間。鑒于該設備測量精度較高,因此,本研究使用微分電路檢測法和新型檢測電路法分別與激光測振儀進行對照測試和分析。
如圖12所示,波形1是噴油器驅動電流波形,波形2是激光測振儀檢測得到的銜鐵位移波形,波形3是微分電路產生的電壓變化率波形,波形4、波形5是比較器電路產生的短脈沖,波形5對應的時刻為電流拐點C的生成時刻。
圖12 微分電路法、激光測振儀對照波形
試驗采用10個BOSCH EV6型噴油器作為樣本進行測試驗證。使用微分電路檢測法、激光測振儀的方法進行對照檢測。由圖中可看出銜鐵完全吸合時,其位移達到最大,銜鐵吸合的瞬間產生振動,因此對應的波形2在吸合時刻會有抖動的現象。銜鐵位移的最大點完全對應電流拐點C,該點也是銜鐵完全吸合的時刻。比較電路在電流波形起始時刻及電流拐點生成時刻(C點)產生2個短脈沖,其中波形5的生成時刻對應電流拐點的生成時刻。當運放比較電路的閾值設置為-1.65 V和-1.75 V時,其試驗數據見表1和表2。
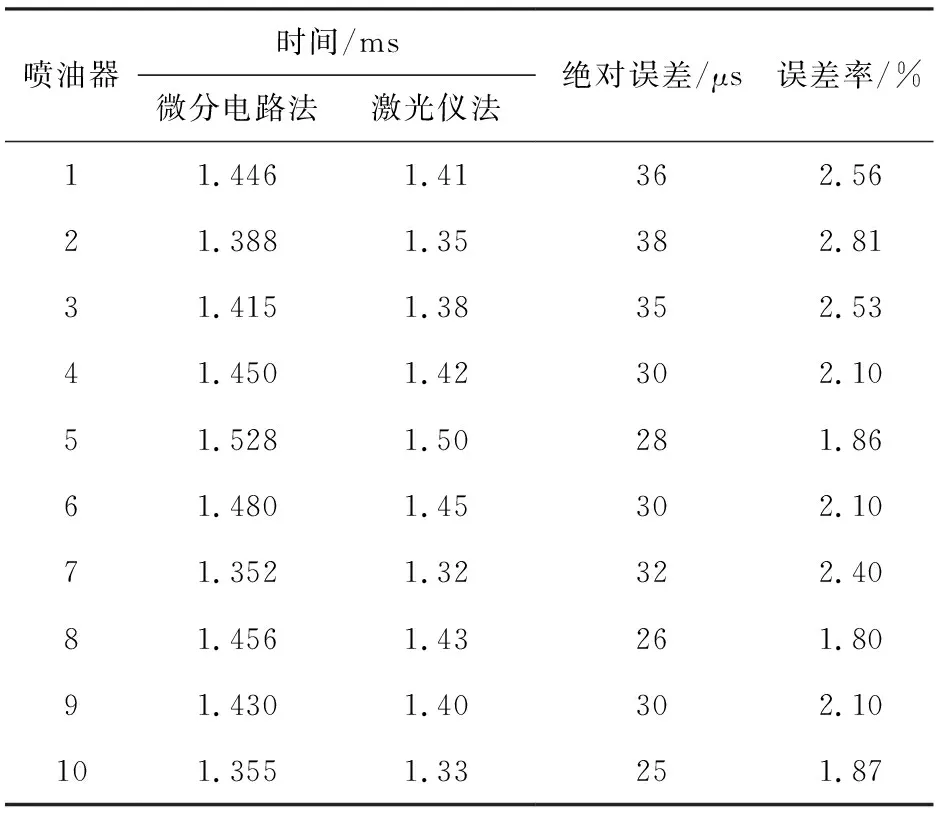
表1 閾值為-1.65 V時的試驗數據
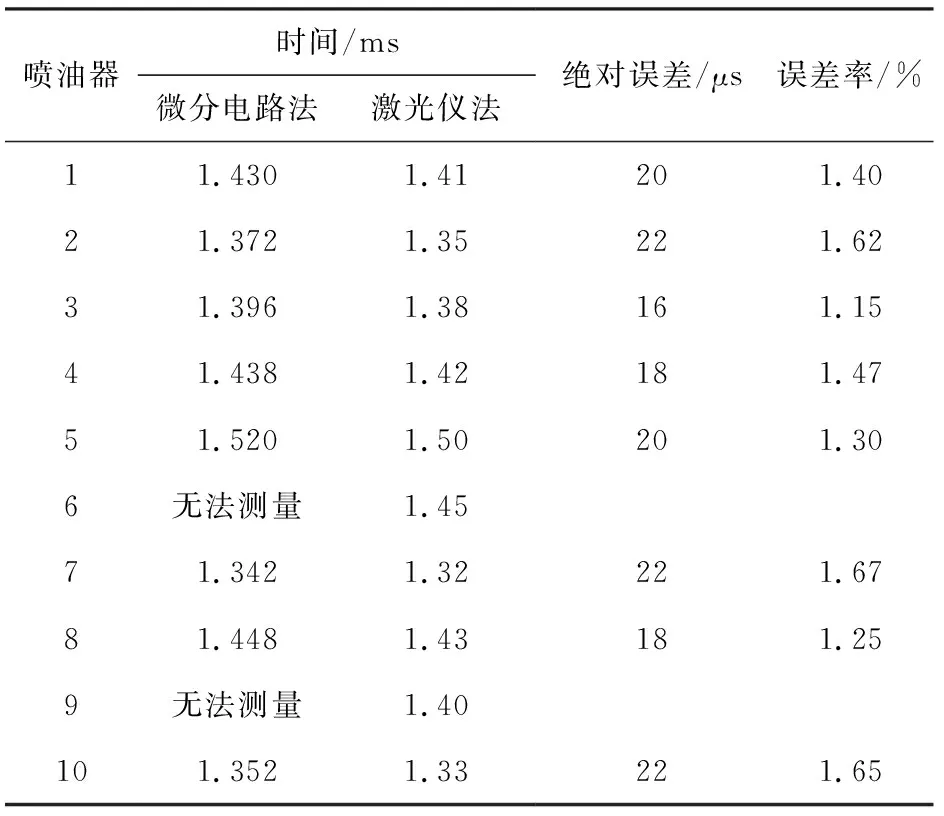
表2 閾值為-1.75 V時的試驗數據
由表1與表2可看出,當閾值為-1.65 V時,該電壓值大于微分電路輸出電壓的低值,且相差較多,此時10個噴油器的開啟時間都能測出,但精度較低,大部分誤差超過2%。當閾值為-1.75 V時,該電壓值接近微分電路輸出電壓的低值,此時有2個噴油器不能生成觸發脈沖,無法完成測量,但其他能檢測出的開啟時間數據精度較高,誤差在2%以內,和新型檢測電路法的檢測數據誤差精度相當。這種現象和第4小節的分析結果基本一致。
如圖13所示,波形1是噴油器驅動電流波形,波形2是激光測振儀檢測得到的銜鐵位移波形,波形3、波形4是檢測電路在電流拐點(B和C)觸發生成的短脈沖。

圖13 新型檢測電路法、激光測振儀對照波形
根據邏輯流程,M的取值是觸發生成小脈寬脈沖的限制條件,當M值取5 μs,4 μs,3 μs時得到的試驗數據見表3,表4與表5。
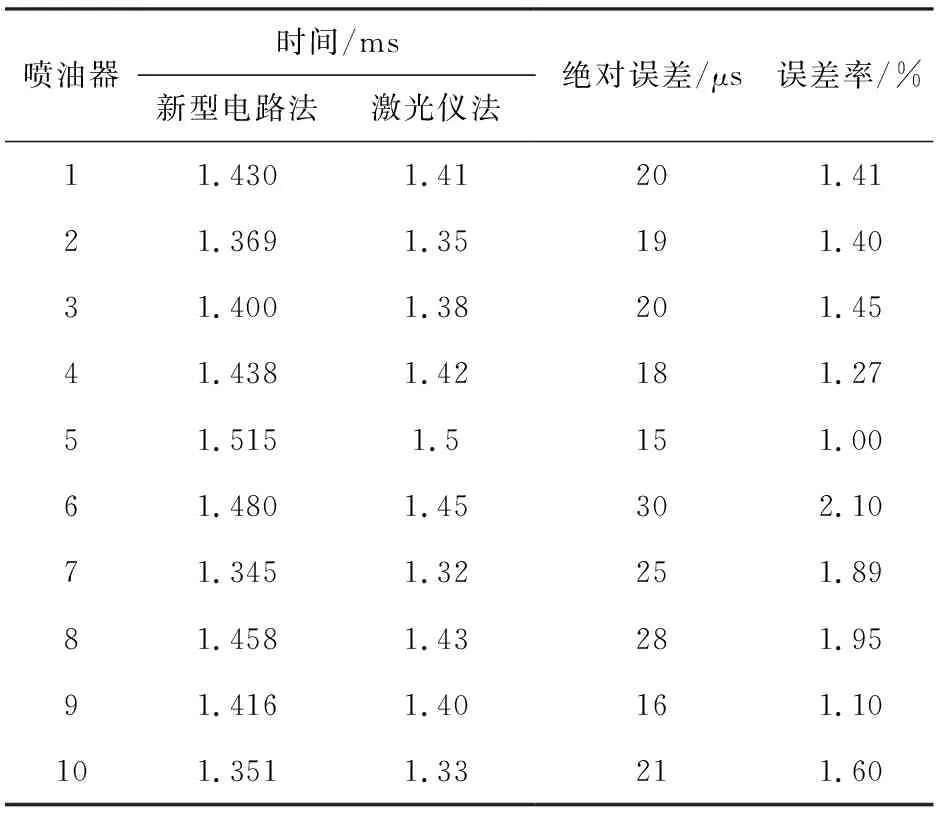
表3 M值為5 μs時的試驗數據
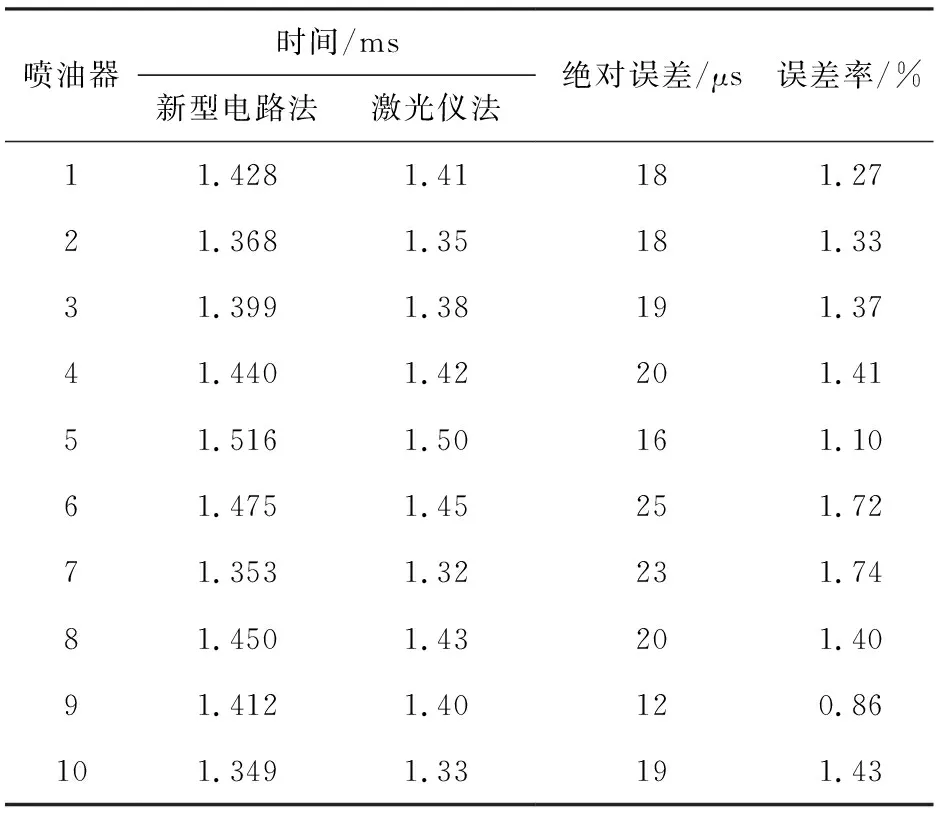
表4 M值為4 μs時的試驗數據

表5 M值為3 μs時的試驗數據
表3至表5的數據表明,M取值越小,測量的誤差率越小,但當M值進一步減小時,誤差率的改變并不明顯。當M取值從4 μs下降到3 μs時,誤差率僅從1.74%降低到1.5%。試驗表明,M值取到5 μs時,檢測精度就能達到2.1%,即使疊加激光測振儀本身的誤差,其綜合誤差率也能達到3%以內。之所以出現M值進一步縮小,而誤差率沒有明顯減低的現象,是因為此時產生誤差的主要原因在于電流采樣電路、調理電路、比較電路的延時。
另外通過本研究的方法也可以檢測噴油器的落座時間,其原理和邏輯結構與開啟時間類似,即圖13中的電流拐點D,E。還可檢測出銜鐵的運動時間T3,如果該值出現了明顯的變化,可能意味著噴油特性發生了改變,因此T3的值可作為噴油器的性能診斷判據。
6 結束語
本研究提出了一種新型檢測電路,可以穩定地在驅動電流拐點產生的時刻觸發生成窄脈沖,克服了微分檢測電路易受干擾、設計成本較高的缺點。通過和激光測振儀的比對試驗表明本方法的誤差率較低。
本方法結構簡單,較易集成到電控單元中,可實時準確檢測開啟及落座延遲時間,為噴油正時控制策略提供決策依據。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
