基于動態時間規整下密度聚類的軌跡識別研究
2021-12-29 07:20:12鄧建軍張保山
火力與指揮控制 2021年10期
吳 達,呂 銳,楊 宇,鄧建軍,張保山,2
(1.空軍工程大學防空反導學院,西安 710051;2.解放軍92095 部隊,福建 臺州 318050)
0 引言
隨著航空發動機、氣動外形設計、飛行控制系統、機載武器系統、空戰指揮系統等不斷更新換代,戰斗機的機動動作也越來越復雜多樣,而目前的目標軌跡生成系統多是根據經驗人為設定的[1-2],難以保證與真實戰場的貼近性、真實性和準確性,在難以獲得飛行訓練手冊和作戰中,對戰斗機的操縱要求以及飛行員的飛行習慣的情況下,通過演習、模擬訓練等飛行記錄數據獲得的機動動作更加可靠。現今關于機動識別的算法多是運用SVM[3-4]、神經網絡[5-7]、動態貝葉斯網絡[8-9]、HMM[10-11]等算法構建分類器,進行機動類型的分類,或者通過構建機動動作庫[12-13],通過模板匹配[14-16]的方法進行識別,上述方法得到的結果并不能運用于目標軌跡生成,因為上述方法僅僅得到機動動作的類型,而沒有考慮機動過程中特征參數峰值的差異導致的分類。對于構建分類器的方法來說,需要一部分有參數峰值標簽的數據。對于構建機動動作庫進行模板匹配的方法來說,需要不斷更新新的機動動作和相關經驗知識。
張夏陽[17]考慮對飛行數據進行聚類獲得了11種機動動作類型,方法中用一組均值與方差構成的特征向量表示每個機動片段,僅僅考慮了空間維度的變化,對時間維度上的變化考慮較少。姚佩陽[14]考慮用DTW 距離將樣本與模板軌跡進行匹配,DTW 距離充分考慮了時間維度,但是兩條軌跡進行規整的過程需要較大的計算量,直接對每兩條軌跡計算DTW 距離而后進行聚類的效率是極低的。不妨利用DBSCAN 算法對所有的軌跡點進行預分類,使得被聚為一類可能性較低的機動片段之間不必再進行DTW 距離計算,再利用DBSCAN 改進DTW聚類方法,對可能分為一類的軌跡進行計算,確定其所屬分類。
1 特征及機動片段提取
從演習訓練數據可以得到北天東坐標系航跡的三維坐標數據,以雷達站位坐標原點O,基本面為原點所在地的大地水平面,3 個坐標軸X 軸指向北極,Z 軸與地表垂直指向空中,Y 軸指向北方,與X、Z 構成右手系。
定義1:一個完整的機動過程是從航跡傾角變化率,航跡偏角變化率和切向加速度由恒定為0 到不為0 的時間結點開始,到不為0 到恒定為0 的時間結點為止。
定義2:機動過程中飛行參數的峰值不同,也被劃分為不同的機動類別。
定義3:機動過程中航跡傾角、航跡偏角、速度改變的累計大小不看作機動類別的區分標準。
為了便于進行聚類分析,排除無關因素,不妨采用航跡傾角變化率、航跡偏角變化率和切向加速度(以上這3 種飛行參數統稱為特征參數)作為特征。
1.1 航跡偏角變化率的獲取方法

1.2 航跡傾角變化率的獲取方法
1.3 切向加速度的獲取方法


圖1 軌跡點特征參數空間分布圖
2 基于DBSCAN 改進DTW 機動軌跡分析
2.1 基于DBSCAN 軌跡預分類
DBSCAN 中鄰域半徑和鄰域中核心點的最小數量MinPts 是其關鍵參數,關于DBSCAN 的具體定義可以參考文獻[18]。
在使用DBSCAN 方法進行軌跡預聚類時,需要進行以下適用性改進:在飛行過程中,進行協調轉彎、抬頭機動、切向加速等機動時,會導致發動機需要提供的功率增大[19]。但是發動機的最大輸出功率是有限的,一種特征參數的增加會使另外兩種特征參數最大值減小,產生負相關性,采用加權的歐式距離或對特征參數進行歸一化都不是最適用的。而馬氏距離既獨立于測量尺度,又考慮到各種特性之間的聯系。對于一個均值為μ,協方差矩陣為S 的多變量向量,兩點間的馬氏距離表示為

其中,X 是由所有軌跡點的特征向量構成的矩陣。

n 為最大機動片段數量,mi是第i 個機動片段的最大軌跡點數量。

設定作為核心點鄰點的限制條件,使同一機動片段的點無效,可以避免相同機動片段間較小距離的軌跡點聚為一個點簇。
2.2 構建基于DBSCAN 改進DTW 機動軌跡識別模型
動態時間規整(DTW)是通過計算T 與R 之間的累積最小歐式距離。當兩條軌跡長度相等時,可以通過直接計算T 和R 的距離,距離越小,兩個序列相似度越高。當兩條軌跡長度不相等時,DTW 采用動態規劃(Dynamic Programming,DP)方法來識別。關于DTW 的詳細說明可參考文獻[20]。
早已有相關學者采用DTW 方法對航跡進行聚類或者分類的研究[15],但很少見到從航跡特征的角度對DTW 方法進行分析:
在戰斗機機動動作中往往存在類似于如下模式的機動過程:以協調轉彎為例,戰斗機往往先是逐漸增加坡度,進入一個較為穩定的轉彎狀態,此狀態下θ 會基本保持不變,累計轉彎角度Δθ 會逐漸增大,然后再逐漸減小坡度改出機動狀態,由定義3 可知,Δθ 的大小不會影響機動類別的劃分,而DTW 方法會自動對θ 值相同的點進行合理對應,使得DTW 距離不會因Δθ 的大小而產生明顯變化。
再者由于記錄的軌跡點之間的時間差不是均等的,且飛行員使用操縱桿的習慣不同,使得擁有相同變化趨勢的軌跡擁有不同的記錄點數量,DTW 方法會自動對變化過程中的處于相似進度的記錄點進行匹配,來減小記錄點數量不同所帶來的影響。
3 實驗分析
實驗1 DBSCAN 改進DTW 聚類算法
實驗1 的數據由專家根據相關經驗知識,在目標軌跡生成軟件上,根據想定參數繪制的10 條完整航跡。包含機動動作詳細情況如下表1 所示。

表1 機動動作設置表
圖2 是其中一條完整的航跡。

圖2 航跡效果圖
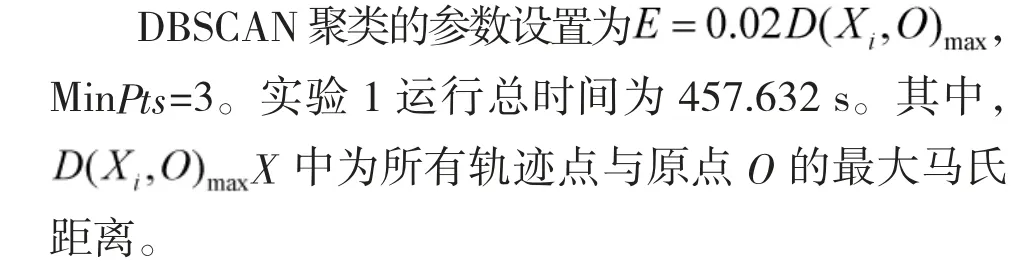

表2 DBSCAN 改進DTW 算法分類結果表
其軌跡分類結果如圖3 所示,不同類別的機動片段放于不同區域內,不同機動片段用不同顏色表示,其中,錯誤劃分片段由紅色曲線標出,虛假片段由綠色曲線標出。

圖3 DBSCAN 改進DTW 算法分類結果軌跡圖
實驗結果驗證了DBSCAN 改進DTW 聚類算法對于第1 節所定義的分類規則的適用性,即飛行參數φ、θ、vt的起始值,飛行參數φ、θ、vt的累計變化值以及軌跡段的疏密程度,不會影響DBSCAN 改進DTW 聚類算法對機動類別的劃分,同時,實驗結果中出現的誤識別,也體現出DBSCAN 改進DTW 聚類算法對于特征參數峰值的不敏感性。
實驗2 DBSCAN 預分類的DBSCAN 改進DTW聚類算法
實驗2 的數據與實驗1 中相同。

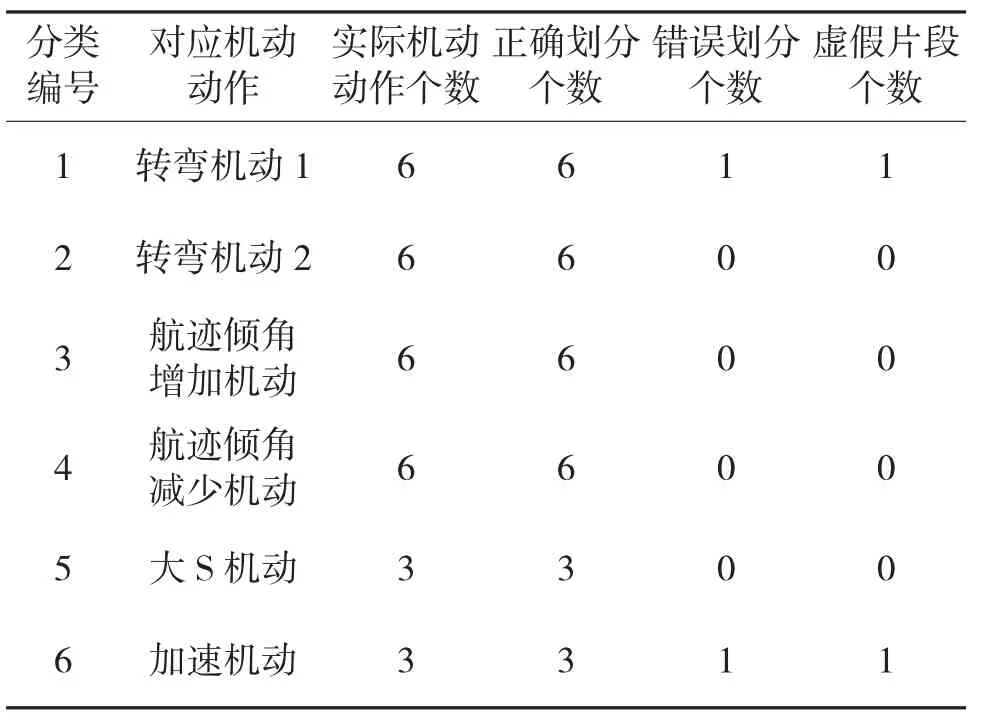
表3 DBSCAN 預分類的DBSCAN改進DTW 算法分類結果表
其軌跡分類圖如圖4,不同類別的機動軌跡段放于不同區域內,不同機動軌跡段用不同顏色表示,其中,虛假片段軌跡已由綠色曲線標出。

圖4 DBSCAN 預分類的DBSCAN 改進DTW 算法分類結果軌跡圖
實驗2 的總運行時間相比于實驗1 減少了16.41 %。主要是由于DBSCAN 預分類限制了DBSCAN 改進DTW 聚類算法進行運算的最大規模,雖然DBSCAN 預分類本身也會加大計算時間的開銷,但相較于由此帶來的計算時間復雜度的減小是十分值得的。
實驗3 數據結構對分類結果的影響
實驗3 中的數據來自模擬訓練的記錄數據。每條航跡中機動片段的機動類型已由記錄數據給出。


表4 數據結構參數設置表
實驗結果如圖5 所示,從圖中曲線的趨勢可以看出,無論是機動軌跡段的總數x,還是機動軌跡段的平均長度n 的增加,都會使DBSCAN 預分類的DBSCAN 改進DTW 聚類算法在時間復雜度上的優化效果更為明顯。同時對比圖5(a)和圖5(b)也可以發現,x 增加帶來的效果更為明顯。圖5(c)說明數據總量的增加也會使錯誤率f(錯誤劃分的機動軌跡段數量占總機動軌跡段數量的比率)增加,但也是在可以接受的范圍內。

圖5 數據結構的影響
實驗4 聚類參數對分類結果的影響


表5 數據結構參數設置表
實驗結果見圖6,圖6(a)中兩種算法在運行時間上的差值隨著c 的增加,有增大的趨勢,說明用于預分類記錄點的數量比例越少,算法優化的效果越明顯。而在c=0.10 時,算法的運行時間均有較大增加,對照圖6(b)中c=0.10 時,錯誤率明顯增加,而正確率(正確劃分的軌跡段的數量與總共軌跡段數量的比率)沒有明顯變化,可知由于數據誤差波動的存在,使得虛假機動軌跡段大量增加。而當c=0.30,時算法運行時間有較大減少的異常現象,對照圖6(b)可知,此時由于門限值選取過大,使得部分機動軌跡段被忽略。
圖6(c)中兩種算法運行時間上的差值隨著d的增加,呈現先保持穩定,后減小的趨勢。隨著d 的增加保持穩定說明,DBSCAN 預分類的能力是有限的,需要DBSCAN 改進DTW 聚類算法進行再分類。而當d 繼續增加時,預分類產生的類別數量逐漸減少,再分類承擔的任務增加,使得算法整體的效率降低。在d=0.010 時,同樣出現兩種算法的運行時間有較大減小的異常現象,對照圖6(d)可知,由于半徑參數選取過小,很多機動軌跡段被誤識別為噪聲點。在圖6(d)中隨著d 不斷增加,正確率有先緩慢增加,后基本穩定不變的趨勢。可見,在d 值的一定范圍內,d 越大,越能減少機動軌跡段被誤識別為噪聲點的現象。

圖6 聚類參數的影響
4 結論
通過實驗驗證了DBSCAN 改進DTW 聚類算法對機動軌跡聚類的有效性,并且驗證了DTW 距離度量方法,可以有效屏蔽與預設分類方法無關的影響因素,提高了類別劃分的準確性。通過實驗研究發現,相較于DBSCAN 改進DTW 聚類算法,DBSCAN 預分類的DBSCAN 改進DTW 聚類算法,不僅節省了計算時間上的支出,還可以得到更為精確的類別劃分效果。當數據規模逐漸增大時,DBSCAN預分類的DBSCAN 改進DTW 聚類算法起到的優化效果更為明顯。當其參數取到c=0.20,d=0.020 時,既可以保證較高的正確率,也可以保證算法較高運行效率,此時,DBSCAN 預分類的作用發揮到最大。同時要注意,若參數選取不當,會造成機動軌跡段的大量丟失或大量虛假片段出現的問題。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
意林原創版(2016年10期)2016-11-25 10:28:30
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2016年2期)2016-03-22 02:42:52
