濃霧區路段安全預警系統對駕駛行為影響研究
2021-12-30 07:19:34李海艦趙曉華劉蓮蓮
重慶交通大學學報(自然科學版) 2021年12期
常 鑫,李海艦,榮 建,趙曉華,劉蓮蓮
(1. 中國民航大學 交通科學與工程學院,天津 300300; 2. 北京工業大學 城市建設學部,北京 100124)
0 引 言
霧是由大量近地面空氣中的水汽受冷凝結形成的,霧區會降低駕駛員的可視距離,大霧造成的視距下降是霧天交通運行效率降低和交通事故誘發的主要因素[1-2]。交通事故統計年報數據表明,不良天氣條件(雨、霧、雪、大風等)下發生的事故數占總數的10%左右,其中霧環境下發生的事故數排在第2位,因大霧影響造成的高速公路事故嚴重程度最大[2],因此,解決霧區道路交通安全問題十分必要。能見度下降對駕駛行為(跟馳、換道、控速)產生的重要影響,是研究設計霧區交通管理和安全預警策略的重要依據[3-4],駕駛員在霧區路段行駛,為降低事故風險而減小速度是最典型的控速行為[5]。
盡管駕駛員在進入低能見度的霧區條件下都會采取控速行為,但是研究表明這種控速行為的停車視距是不足的,特別是在遇到危險情況(前車突然減速或前方發生事故等)時[6-7],如能提前獲得前方道路能見度信息,并及時把預警信息傳遞給下游車輛,可為駕駛員進入霧區前的速度調整提供充足時間。駕駛模擬技術是一種安全、經濟、高效的實驗研究手段,且研究變量容易控制,可以根據研究目的設計不同因素水平的駕駛模擬環境,進而展開面向人因的駕駛行為特性研究[8-10]。近年來部分學者借助駕駛模擬技術,開始研究霧區預警系統對霧區道路交通安全的影響。L.M.TRICK等[11]利用駕駛模擬環境,獲得了不同年齡段駕駛員霧區內的速度數據,表明老年駕駛員在霧區基本都大大降低了速度,而年輕駕駛員卻很少降低速度,駕駛風險較高;Y.WU等[12]利用駕駛模擬器,評估了基于車車通信技術的抬頭顯示預警系統和語音播報預警系統,對霧區駕駛反應特性的影響,表明車車通信的霧區預警系統,可以減少駕駛員的反應時間和降低追尾事故的概率。盡管以往的研究已經開始關注不同的霧區預警系統對駕駛員速度調控的影響,但大部分的研究往往只關注某些特定的駕駛場景(單一預警系統)和霧區內的駕駛行為影響,對于不同類型預警系統共同作用下,對駕駛行為影響和交通安全的系統分析仍比較缺乏。筆者的主要研究目標為:利用駕駛模擬技術分析不同安全預警系統,對高速公路濃霧區控速行為和交通安全的影響研究。
1 實驗設計
1.1 實驗場景
實驗選取雙向4車道的高速公路作為駕駛模擬仿真道路,實驗道路長度為5 km,實驗基本路徑如圖1。圖1中:A~B:0.5 km的實驗起始路段(雙向4車道,限速80 km/h);B~C:1.0 km的實驗過度路段(雙向2車道,限速40 km/h);C~I:5.5 km雙向4車道高速公路(正式實驗段),其中濃霧區G~H路段區間限速60 km/h,其他路段限速120 km/h。為研究不同的霧區預警系統對駕駛員在進入霧區的過程中駕駛行為的影響,研究選取3 km作為數據分析路段,并將路段分為無霧區E1~F(1 km)、霧區漸變段F~G(0.5 km)以及濃霧區路段G~H(1 km)3個區間。實驗設計4種駕駛環境:無預警、車載設備(on board unit,OBU)預警、動態信息標志(dynamic message sign, DMS)預警以及OBU和DMS共同提供預警信息。實驗場景中道路設施形式相同,交通流狀態相同,實驗中OBU預警車載端使用平板提供信息。
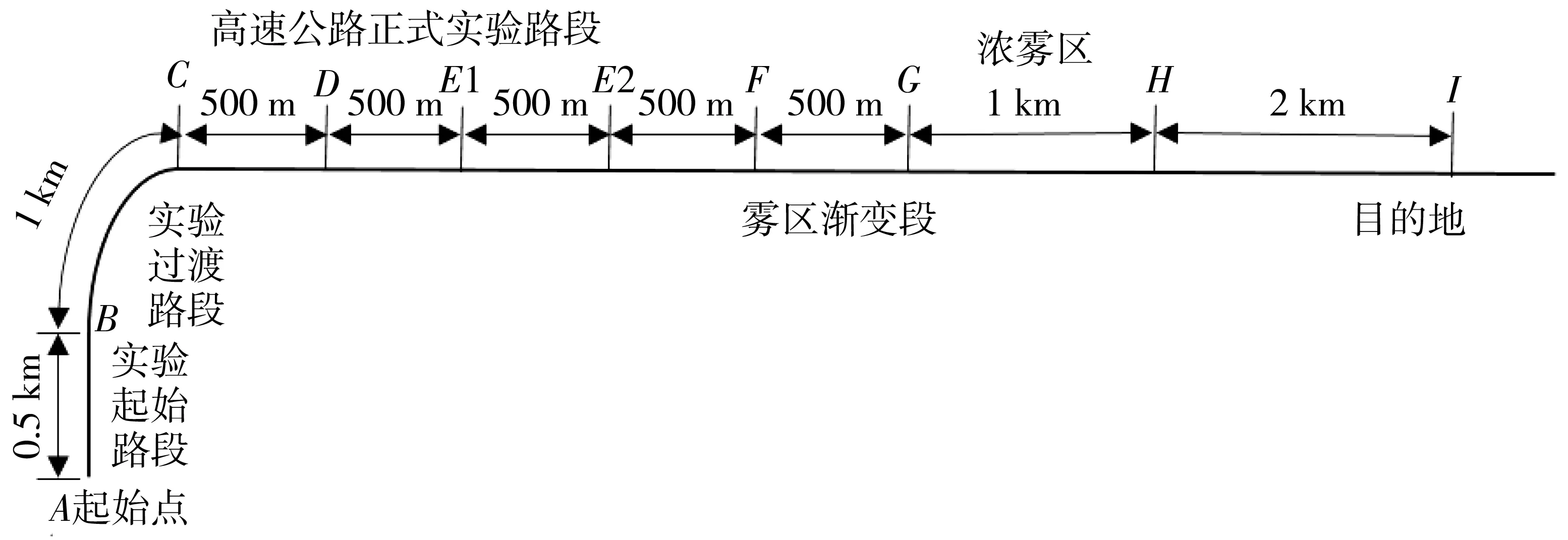
圖1 實驗基本路徑示意Fig. 1 Schematic diagram of basic experimental path
實驗中,車載設備從D點開始預警前方濃霧區位置和限速,至濃霧區前每隔500 m預警一次,并更新霧區位置預警信息。整個實驗過程中,車載設備具備超速預警功能,OBU預警系統采用語音播報、預警信息文字顯示和預警標志相結合的方法,其中,超速預警界面顯示示意如圖2(a)。OBU可以感知前方車輛速度及間距信息,并依據安全間距計算方法,當速度大于保持最小安全間距所要求的速度時,OBU會發出“滴滴滴”的預警提示。在有DMS的場景中,DMS設置在E1和E2位置,并顯示濃霧區位置預警,實驗過程中的場景如圖2(b);為避免其他因素的干擾,空白對照組中,DMS顯示信息為“興延高速歡迎您”的字樣。

圖2 不同預警系統顯示Fig. 2 Display of different early warning systems
根據GB/T 27964—2011《霧的預報等級》中對濃霧能見度的定義,實驗設計的濃霧區能見度為300 m。參考文獻[3]對駕駛模擬場景中霧區能見度的標定方法,對300 m能見度標定:
1)選取7名視力或矯正視力正常的試驗駕駛員參與霧區能見度標定。
2)在一條直線段高速公路模擬場景中,距離試驗駕駛員300 m處停放一輛紅色小客車。
3)使用模擬器setflag函數,調整霧區能見度參數,使實驗駕駛員剛好能看到紅色車輛輪廓。
4)記下每一次霧區能見度參數值,取7位試驗駕駛員所調整參數的平均值,作為模擬濃霧場景中300 m能見度的設置參數。
1.2 實驗方案
根據中心極限定理,如果隨機變量服從正態分布,那么隨機抽取的樣本也服從正態分布;樣本量大于30個,即能代表整體的樣本特性。據此,選取35位駕駛員(23名男性和12名女性)進行實驗,35位駕駛員符合我國駕駛員個體特征(性別、年齡等)分布。
實驗過程共4種駕駛環境,為避免駕駛人因熟悉駕駛路線而影響試驗結果,每個場景駕駛員駕駛1次;實驗分2次進行(間隔1 d)。實驗內容為:
1)實驗前基本信息填寫。填寫包括:基本信息(姓名、性別、年齡和駕駛經驗)和實驗前生心理狀況(睡眠、飲食以及疲勞狀態自評等)。
2)駕駛前培訓。工作人員為試駕駛員進行車載設備產品說明,同時告知駕駛員相關注意事項,如行駛道路等級,及試驗過程中出現事故后的處理辦法等。
3)預駕駛。駕駛員在模擬器的非實驗場景中駕駛5 min,以適應模擬車輛操作和模擬駕駛環境。
4)正式實驗。告知試駕駛員每次的行駛目的地,然后開始實驗,模擬倉系統開始采集數據,工作人員記錄試驗過程。不同場景實驗之間,駕駛員休息15 min,已盡量避免實驗場景之間的相互影響。
5)模擬駕駛結束。試驗結束后,被試駕駛員填寫駕駛反饋問卷。
2 控速行為效果評價
2.1 控速行為影響的多元回歸分析
為了更好描述不同的霧區預警系統,在駕駛員進入霧區過程中對減速操作行為的影響,分別對不同區域進行數據分析。利用SPSS軟件對統計數據進行K-S檢驗,結果表明數據服從正態分布。然后對數據(每500 m為一組)的統計特征進行描述,結果如圖3。結果表明:駕駛員進入濃霧區前會選擇減速,以保證交通安全;當駕駛員使用預警系統時,駕駛員采取減速行為比沒有預警系統提醒時提前。從實驗結果中發現:駕駛員在使用車載預警系統時,駕駛員在濃霧區平均運行速度較高,但在限速值以下。
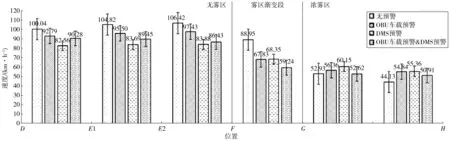
圖3 平均運行速度Fig. 3 Average running speed
每位駕駛員隨機進行4個場景的實驗,模擬駕駛時間在30 min左右,模擬倉數據采集頻率為20 Hz。對35位駕駛員每一個場景的3個區域的相同觀測指標(速度、加速度等)進行統計,但統計數據存在聚集性問題,不能根據數據統計結果直接分析不同預警系統對駕駛行為的影響效果。線性混合隨機效應模型考慮到數據的聚集性問題[13],能夠對數據結果的變異進一步分析,從而獲得各項因素對駕駛行為結果的影響估計和假設檢驗結果,模型形式如式(1):
yijm=αj+βjXijm+βjXi+μi+ξijm
(1)
式中:yijm為駕駛員平均速度;i為駕駛員編號(1,2,3,…,35);j為路段區域編號(1,2,3);m為實驗場景編號(1,2,3,4);βj為固定效應矩陣,表示區域j的相關系數;Xijm為不同霧區預警系統;Xi為駕駛員個體特征;αj為不同路段區域下模型截距;μi為不同個體截距的變異;ξijm為隨機誤差項(殘差)。
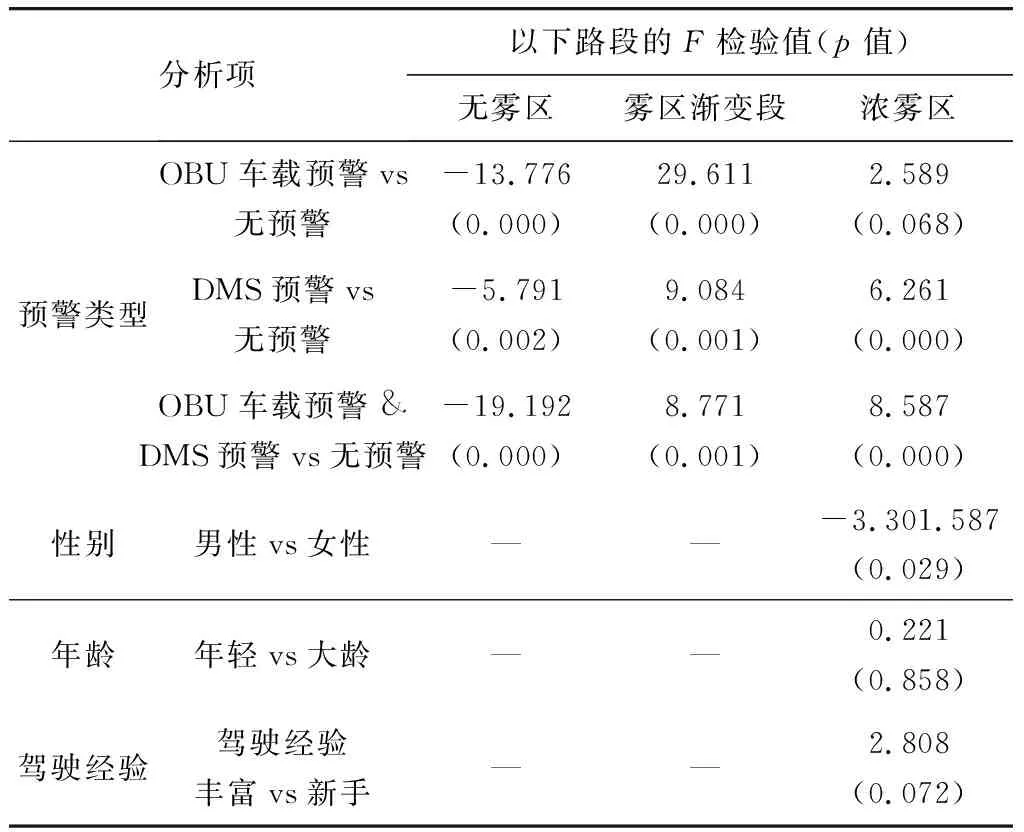
表1 平均運行速度影響因素顯著性分析Table 1 Significance analysis of influencing factors of averagerunning speed
2.2 控速行為評估指標結果分析
道路出現團霧會影響駕駛員視距,駕駛員為保證在霧區行車有足夠的反應時間,在進入霧區前通常選擇降低速度。駕駛員速度調控行為與駕駛員對預警系統提供的信息感知水平有關,文獻[14]用駕駛員在無霧區路段的終點速度(vend)作為反映駕駛員進入霧區前的準備情況,采用進入霧區后的速度與無霧區速度的變化率(Predu)來評估速度調控能力變化,Predu的計算如式(2):
(2)
式中:vclear為無霧區域的平均運行速度,被試駕駛員在E2—F區間段的運行速度的均值;vfog為濃霧區域平均運行速度。
霧區漸變段的最大減速度通常用來考量駕駛員在遇到危險境遇前的剎車行為的安全性,減速度越大,剎車行為越危險[18]。另外,筆者選取濃霧區起始位置平均速度vstart、霧區結束時平均速度vend、進入霧區前平均最大減速度amin、駕駛員在霧區對限速的服從比例(即駕駛員運行速度在限速60 km/h以下的比例,Pvfog<60),來評估不同預警系統對車輛由無霧區進入濃霧區后的運行穩定性影響。
控速行為評估指標計算結果如表2。結果表明配備有霧區預警系統場景的vend和vstart明顯比沒有預警系統的要小。具備霧區預警系統時,駕駛員霧區限速服從度明顯提升,這表明霧區預警系統提供的預警信息能優化駕駛員控速行為,提升霧區駕駛行為穩定性。且由圖3可知,在預警系統中,僅配備OBU預警系統的駕駛員服從度較高,在限速水平下均速也最大,運行效率整體最優。
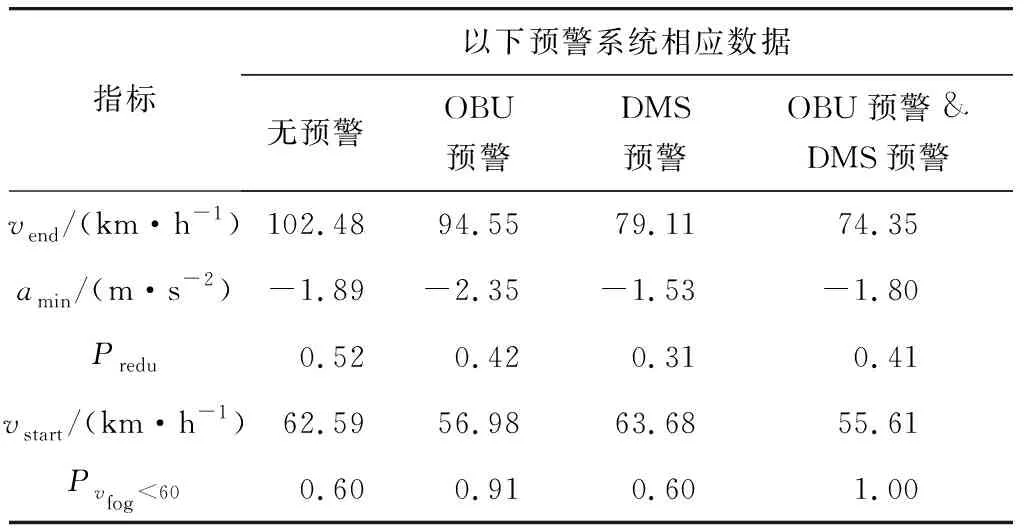
表2 控速行為評估指標Table 2 Evaluation indexes of speed control behavior
3 安全評估
3.1 安全指標選取
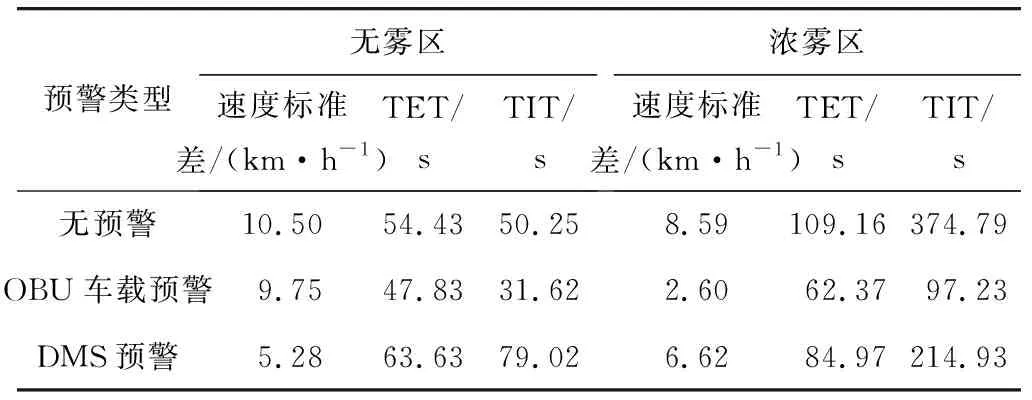
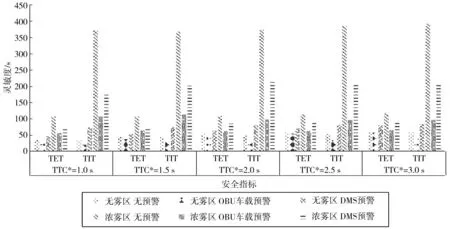
交通事故致因一般比較復雜,與人的因素、車輛性能和天氣狀況等有關。參考文獻[15]、文獻[16]的研究成果,選取速度標準差,以及評估交通流前后車輛追尾碰撞事故隱患指標TET和TIT作為評價道路交通縱向安全性指標。對于安全性指標,TET表示駕駛員處在危險狀況下(即TTCbrake (3) (4) (5) 0 (6) (7) 式中:Δt=0.05 s;t為數據采集頻率;n為駕駛員編號;N為駕駛員總數;δt為判斷變量,TTC*為TTC閾值;xn(t)-xn-1(t)為實驗車與前車間距;Ln-1為車輛長度;vn(t)為跟馳車輛速度。 在實驗過程中,駕駛模擬器動態采集實驗車輛的行駛速度、加速度,同一車道前方250 m范圍內的前車運行速度數據,以及前后車間距。模擬場景每次實驗場景交通流參數相同。實驗車外的其他車輛速度為勻速行駛,分布在C—I路段部分,在濃霧區G—H的速度為55 km/h,霧區漸變段部分的車輛設置為70 km/h,其他路段車輛速度設置為90 km/h。實驗過程中,駕駛員隨機跟馳前方車輛,當跟車間距小于250 m后,模擬器開始動態采集前車運動信息和前后車間距,由此可以計算式(3),根據文獻[18]、文獻[19]的研究,TTC*范圍為1~3 s。 速度標準差、TET和TIT被用來評估不同預警系統對交通流縱向安全性的影響,研究選擇TTC*=2 s作為基本分析案例。表3為3種不同場景(OBU預警& DMS預警數據不足,未進行分析)下的安全性指標計算結果。配置有OBU預警系統時,TET和TIT最小,盡管DMS僅設置在無霧區,但是預警信息能夠幫助駕駛員進入霧區前優化控速行為,使得駕駛員能夠在霧區保持更加穩定的速度。因此,該場景下霧區縱向安全性比沒有預警系統時較高。 表3 交通安全指標計算結果Table 3 Calculation results of traffic safety indexes 不同TTC閾值條件(TTC*=1.0、1.5、2.0、2.5、3.0 s)下的TET和TIT靈敏度分析如圖4。結果表明不同閾值條件下,濃霧區TET和TIT值一致變大,說明濃霧區駕駛安全性較低。另外,不同預警方式下的縱向安全性比較評估結果相同,從側面驗證了霧區預警系統能夠有效改進駕駛安全性,且OBU預警系統對交通安全性提高更加顯著。 圖4 不同TTC閾值靈敏度分析Fig. 4 Sensitivity analysis of different TTC threshold values 通過多因素水平分析和線性混合模型建模,分析多變量對駕駛行為的顯著性影響;通過計算控速行為和縱向安全性指標,評估不同霧區預警系統對高速公路霧區路段控速行為及交通安全性的影響。獲得以下結論: 1)駕駛員進入濃霧區前會選擇減速,配備有預警系統時,駕駛員出現顯著減速行為提前;另外,個體社會屬性(性別、年齡、駕駛經驗)對高速公路霧區駕駛員平均運行速度沒有顯著性影響,而不同的霧區預警系統對駕駛員平均運行速度有顯著性影響。 2)安全預警系統提供的交通信息能夠優化駕駛員進入高速公路濃霧區前的控速行為,進而提升霧區運行速度的穩定性。配備OBU預警系統場景的駕駛員不僅限速服從度較高,且平均運行速度在限速水平下。 3)安全預警系統提供的霧區預警信息能夠顯著增強交通安全性,對于研究提出的OBU預警系統對駕駛安全性的提升更加明顯。
3.2 安全效果評價
4 結 語
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42現代儀器與醫療(2022年2期)2022-08-11 09:51:40汽車實用技術(2022年14期)2022-07-30 06:13:42汽車實用技術(2022年4期)2022-03-07 06:07:20汽車工程師(2021年12期)2022-01-18 06:02:43小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50信息安全與通信保密(2016年3期)2016-08-23 01:23:46發明與創新(2016年38期)2016-08-22 03:02:52太空探索(2016年5期)2016-07-12 15:17:55公民與法治(2016年4期)2016-05-17 04:09:26