考慮后視效應和多前車信息的跟馳模型①
2022-01-06 08:05:12張凱望劉見振
計算機系統應用 2021年11期
惠 飛, 張凱望, 劉見振, 席 輝
1(長安大學 信息工程學院, 西安 710064)
2(北京交科公路勘察設計研究院有限公司, 北京110191)
隨著車聯網技術的發展, 跟馳車在智能網聯環境中利用車載終端可以有效獲取多輛前車的行駛信息,優化加速度輸出, 可從車輛微觀層面改善交通流運行質量[1].網聯車跟馳模型的研究可為未來實施大規模的實地測試提供模型參考, 已成為交通流及智能交通領域的研究熱點[2].
20 世紀中葉, Brackstone等[3]通過對微觀交通流的不斷研究, 提出車輛跟馳模型的基本思想, 隨后人們就開始了對跟馳模型的不斷探索和研究.Gazis等[4]根據通用汽車公司提出的GM模型概念, 成功推導出來GM模型的函數表達式, 成為用刺激-反應原理來描述跟馳行為的典型模型.Bando等[5]提出OV跟馳模型,可以用來描述很多現實中的交通現象(例如: 走走停停, 阻塞相變等), 但是該模型中有不切合實際的加速度和減速行為, 與實際不相符合.為了解決OV模型中存在的各種問題, 姜銳等[6]提出FVD模型, 該模型考慮了正負速度差對跟馳車流的影響, 更加全面地描述了車輛的跟馳行為.近幾年, 人們對跟馳模型進行了更加深入的研究, 在FVD模型的基礎上, 開始引入緊貼前車的加速度和速度差等信息來增強跟馳車流的穩定性[7-14].但是現有的跟馳模型未能考慮智能網聯車可以獲取的多輛前車的信息以及后車的速度信息, 從而對跟馳車駕駛狀態進行調整.如果不考慮多輛前車的行駛信息, 一旦前車進行先加速后減速(或先減速后加速)的運動, 那么跟馳車的速度就會出現較大的起伏,其主要原因就是前車也要考慮它自己前車的行駛狀態,但是跟馳車無法獲得前車所考慮的車輛的行駛狀態的變化從而引起的波動.此外為了更加安全的行駛, 在駕駛過程中, 考慮后車的速度信息及時對車輛駕駛進行調整也有利于跟馳車流的穩定性.
因此本文提出了一種基于智能網聯車的跟馳模型—考慮后視效應和多前車速度差信息及加速度信息的跟馳模型(Backward Looking-Multiple Velocity Difference and Accelerations with Memory, BL-MVDAM), 并且探究了當考慮多少數量的前車行駛信息及對后車關注程度為多少時, 可以較大程度提高跟馳車流的穩定性.為了驗證BL-MVDAM模型的合理性, 首先對其進行線性穩定性分析, 分別分析模型中各參數對系統穩定性的影響; 最后使用Matlab仿真平臺對模型進行仿真驗證, 證明改進模型可以提高跟馳車隊行駛的穩定性.
1 BL-MVDAM模型建立
本文在MVD模型的基礎上, 引入后視效應和多前車的行駛信息(加速度信息[15], 速度差信息及歷史駕駛信息)綜合影響, 得到改進模型:
對式(1)進行展開描述為:

其中, α為最優速度的敏感系數,t為當前時刻,P為駕駛員對前車的關注程度P≤0.5時, 表示駕駛員對后車關注程度高于前車),v(t)為t時刻的車速, λi為速度差的反應系數,k為含前車數量,T為外界不可控因素產生的延時, △xn(t)表示相鄰兩輛車車頭與車尾的間距[16];V(·)表示跟馳車的最優速度函數, τ表示記憶步長; γi是第n+i-1輛車的最優速度記憶項的敏感系數,an+i-1表示第n+i-1輛車的加速度, ωi表示第n+i-1輛車的加速度敏感系數.
本文使用的最優速度函數[17]為V(Δxn(t))的表達式為:

其中, α1, α2為VF,VB最優速度函數系數,hc為車輛間的安全距離.
因為T的存在不利于我們對模型進行模擬和分析,參照文獻[9]通過下列各式對T進行簡化:

將式(4)帶入式(2)中得到:
為了簡化運算 Δxn(t-τ), 對 Δxn(t-τ)進行泰勒展開,并通過:

對其進行忽略其非線性項.
同理可得:

將式(8)的結果帶入式(6)得:
2 線性穩定性分析
在周期邊界條件下, 對BL-MVDAM模型進行線性譜波微擾法[18]進行穩定性分析, 即對一個勻速行駛的跟馳車流, 施加一個輕微的擾動, 如稍微調整車輛位置, 使交通系統略微偏離原始的穩定狀態, 以便對擾動的傳播變化規律進行研究[19].
其周期邊界條件設為: 假設給定初始狀態為穩定態, 車輛的車頭間距均勻分布, 都為h, 則其對應的優化速度為V(t).則每一輛車的初始位置為:

給穩定交通系統中施加一個擾動:

則每輛車的位置轉變為:

則有:
聯立式(15)、式(16)得:
將式(13)-式(16)帶入式(17)中得到關于yn(t)的微分方程:
由yn(t)=ejkn+zt, 并且設ejkn+zt=eβ, 然后對式(16)進行Fourier展開可得:
簡化式(19)得:
對yn(t)進行傅里葉級數展開, 并將參數z展開為z=z1(ik)+z2(ik)2, 根據(ik), (ik)2系數對應可得:
若z2為正, 則交通系統保持穩定狀態, 反之, 若z2為負數, 則交通系統無法保證穩定性[20].為了方便表示令:

則由式(21)可得臨界穩定性曲線方程為:
則當車頭間距滿足下式條件時, 交通系統處于穩定狀態.
當車頭間距滿足下式條件時, 交通系統處于不穩定狀態.
圖1為OV模型, FVD模型, MVD模型, BLVD模型和BL-MVDAM模型(考慮3輛前導車)的穩定性邊界曲線對比圖, 其中優化速度函數使用式(3)所示函數.通過對比圖1中的曲線, 我們可以清楚地發現, 與其他模型相比, BL-MVDAM模型的穩定性區域更大,不穩定區域更小.從現行穩定性的角度來看, BL-MVDAM模型比上述模型具有更好的穩定性.
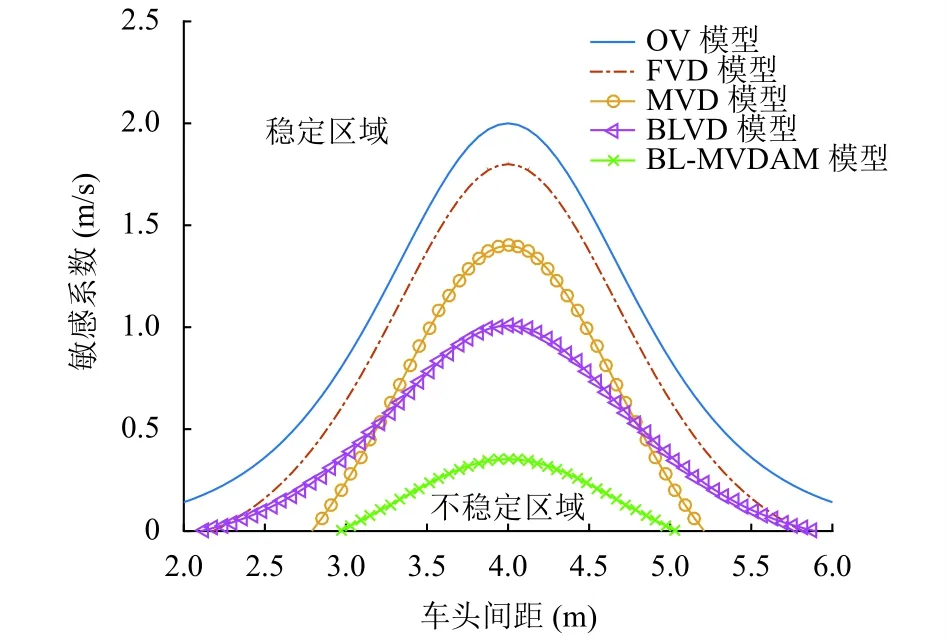
圖1 模型的穩定性邊界曲線對比
圖2為BL-MVDAM模型在取不同前導車數量時的車頭間距與駕駛員敏感系數相位圖對, 曲線上方為穩定區域, 下方為不穩定區域.通過觀察圖2中的曲線可以發現, 當我們考慮信息聯合的前導車數量合理時,交通系統的穩定性區域也在逐步增大, 表明引入多前車的信息有利于交通流的穩定性.
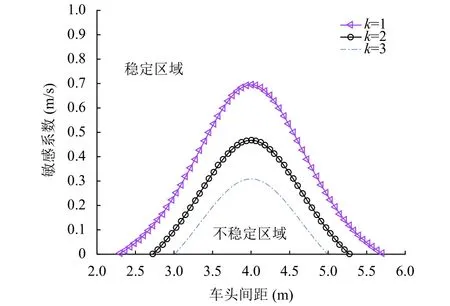
圖2 不同k值下車頭間距與敏感系數相位圖
由圖3可以發現, 當P值不同時, 跟馳系統的穩定性也會發生改變.觀察中穩定性線可以發現, 在車聯網環境下, 當我們考慮多輛前車信息聯合(選取合理的前車數量)時, 并且增強對后車的關注程度可以明顯提高跟馳系統的穩定性.由此可以證明, BL-MVDAM模型在車聯網環境下, 考慮多導車的數量以及后視效應對交通系統穩定性有實際意義.
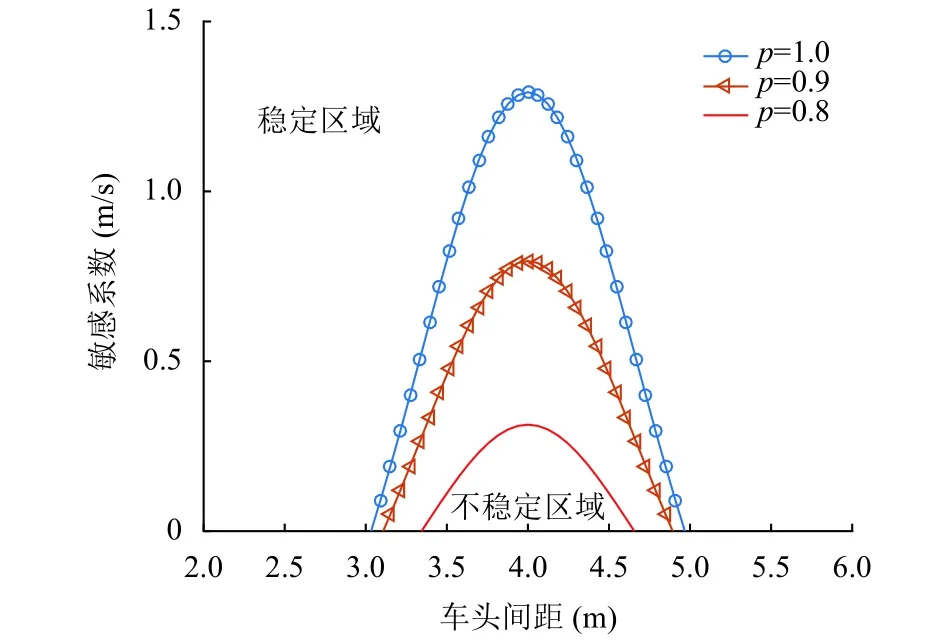
圖3 不同P值下車頭間距與敏感系數相位圖
3 數值仿真與模擬
利用數值仿真和模擬對BL-MVDAM模型的穩定性進行驗證和分析.
測試環境參照文獻[9]設置如下: 選取一個總長度為L=400 m的環形道路, 均勻分布著N=100輛車, 安全車頭距離為初始車距, 即Hc=4 m, 車輛的最大速度取7.2 km/h (即2 m/s), α1, α2均取1, 駕駛員的最優速度敏感系數[21]取為α =0.85, 根據文獻[22]設置多前車速度差敏感系數取為 λi={0.15, 0.05, 0.01}, 根據文獻[20]設置最優速度隨記憶項改變的敏感系數取為 γi={0.2,0.15, 0.1}, 多前車加速度敏感系數取值為 ωi={0.1, 0.08,0.06}, 記憶步長 τ=0.2 s, 設置采樣間隔為0.2 s.
給穩定車流的第100輛車施加一個輕微擾動, 車輛初始狀態為:
3.1 仿真環境1
測試只考慮緊貼車的情況下,P, λ, ω參數對跟馳車流穩定性的影響.
圖4是不同P值下, 100輛車的速度分布對比圖,經分析可以看出, 當其他參數保持一定時(λ =0.3, γ=0.2,ω=0.1)時, 施加擾動后, 車流速度開始出現波動.并且與施加擾動的第N輛車相距越近的車輛的速度波動就越明顯, 并且隨著時間的推移, 車輛速度慢慢趨于穩定, 交通流呈現較為穩定狀態.由圖中可以發現P=0.8時的速度變化波動率明顯小于P=1和P=0.9時的速度變化波動率[23], 并且時間的推移,P=0.8的跟馳車流速度波動率收斂到一個較小的值(向上波動率為4.60%, 向下波動率為5.32%), 而P=0.9的跟馳車流波動率(向上波動率為7.13%, 向下波動率為10.13%)和P=1.0的跟馳車流波動率(向上波動率為12.79%,向下波動率為11.05%)仍處于一個較大的值.因此為了更好地進行數值模擬, 所以在后續仿真過程中我們設置P=0.8.
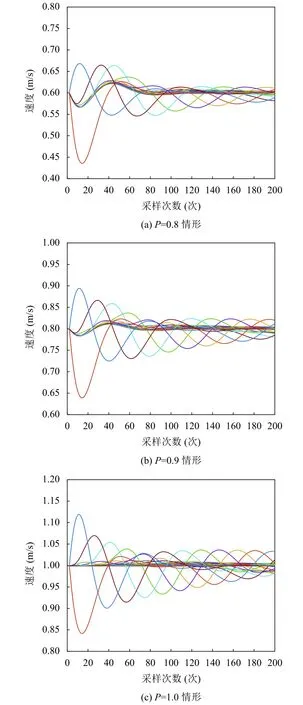
圖4 不同P值下100輛車的速度變化對比圖
圖5和圖6分別是不同 ω和不同 λ值下車頭間距的變化圖.對其進行分析, 可以發現當其他參數保持一致時(P=0.8, γ=0.2), λ和 ω 的取值發生改變時, 都會對車頭間距產生影響[22].通過對比t=100 s和t=300 s時刻的100輛車的車頭間距變化(即將圖5(a)和圖5(b)進行對比, 圖6(a)和圖6(b)進行對比), 可以發現, 車頭間距的波動幅度隨著λ和 ω 取值的不同發生著明顯的變化.并且當 λ=0.3時的車頭間距波動幅度明顯小于 λ=0和0.1時, 當 ω=0.3時車頭間距波動幅度明顯小于 ω=0和 ω=0.1時.并且隨著時間的推移, λ=0.3和 ω=0.3車隊的車頭間距波動幅度越來越小, 而其他兩種情況的跟馳車流的車頭間距波動幅度越來越大.由此可以說明, 前導車的加速度信息和速度差信息確實對跟馳模型的穩定性有著促進作用.
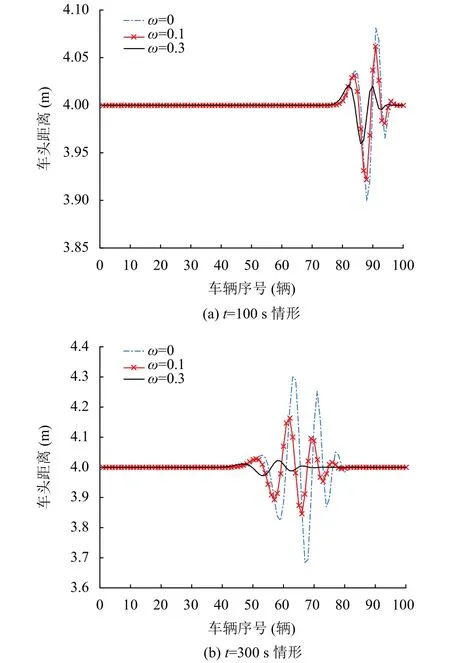
圖5 不同ω 值下車頭間距變化對比圖
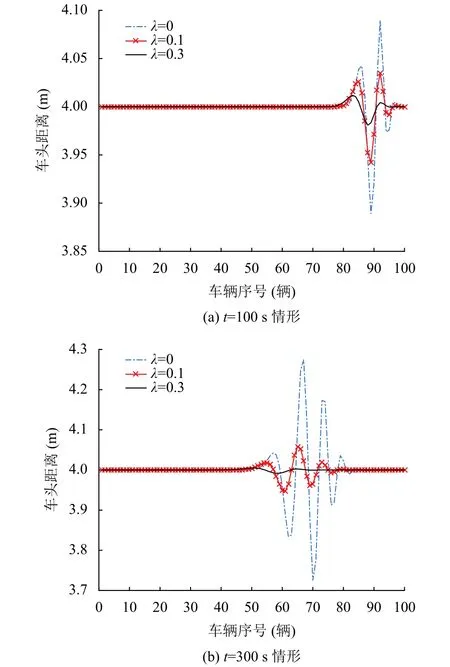
圖6 不同λ 值下車頭間距變化對比圖
綜上所述, 在跟馳模型中引入后視效應和多前導車速度差信息以及加速度信息, 有利于交通系統的穩定性, 具有實際意義.
3.2 仿真環境2
模擬多前車情況下, 前車數(含跟馳車)k對交通流穩定性的影響.
多前車參數設置為 λi={0.15, 0.05, 0.01}, γi={0.2,0.15, 0.1}, ωi={0.1, 0.08, 0.06}.k的取值為1、2、3、5.車輛初始狀態均與仿真環境1相同, 對第100輛車施加輕微擾動(即x100(0)=(n-1)L/N+0.3)后進行仿真,分別對t=100 s和t=300 s時的測試結果進行分析.
圖7是不同k值下車頭間距變化對比圖.通過對t=100 s和t=300 s時刻考慮不同前車數量時跟馳車流的車頭間距進行對比, 可以明顯看出從k=1,k=2到k=3隨著k值的增加, 車頭間距的波動幅度一直在減少(即穩定區域一直在擴大).而在k=5時, 其波動幅度超過了k=3的波動幅度(即其不穩定區域超過了k=3時), 這是因為當我們考慮的前車距離跟馳車距離很遠的時候,就會產生很多干擾信息, 反倒不利交通系統的穩定性.對比圖7(a)和圖7(b)我們可以發現隨著時間的推移,當我們考慮前導車數量為3時, 跟馳系統逐漸趨于穩定, 而當我們考慮的前車數量不合適的情況下(即過少如k=1或k=2, 過多如k=5時)跟馳系統仍處于較大的波動中, 維持不穩定狀態.因此在后面的仿真過程中, 我們的k值取3.
由圖7可以發現, 后50輛車(即第51-100輛車)的波動幅度明顯高于, 前50輛車(即第1-50輛車).因此為了驗證k=3時, 跟馳系統的穩定性最高, 因此我們選取第85, 80, 75輛車的運動狀態進行采樣, 并繪制其在考慮不同前車數量的情況下的速度變化圖如圖8所示.
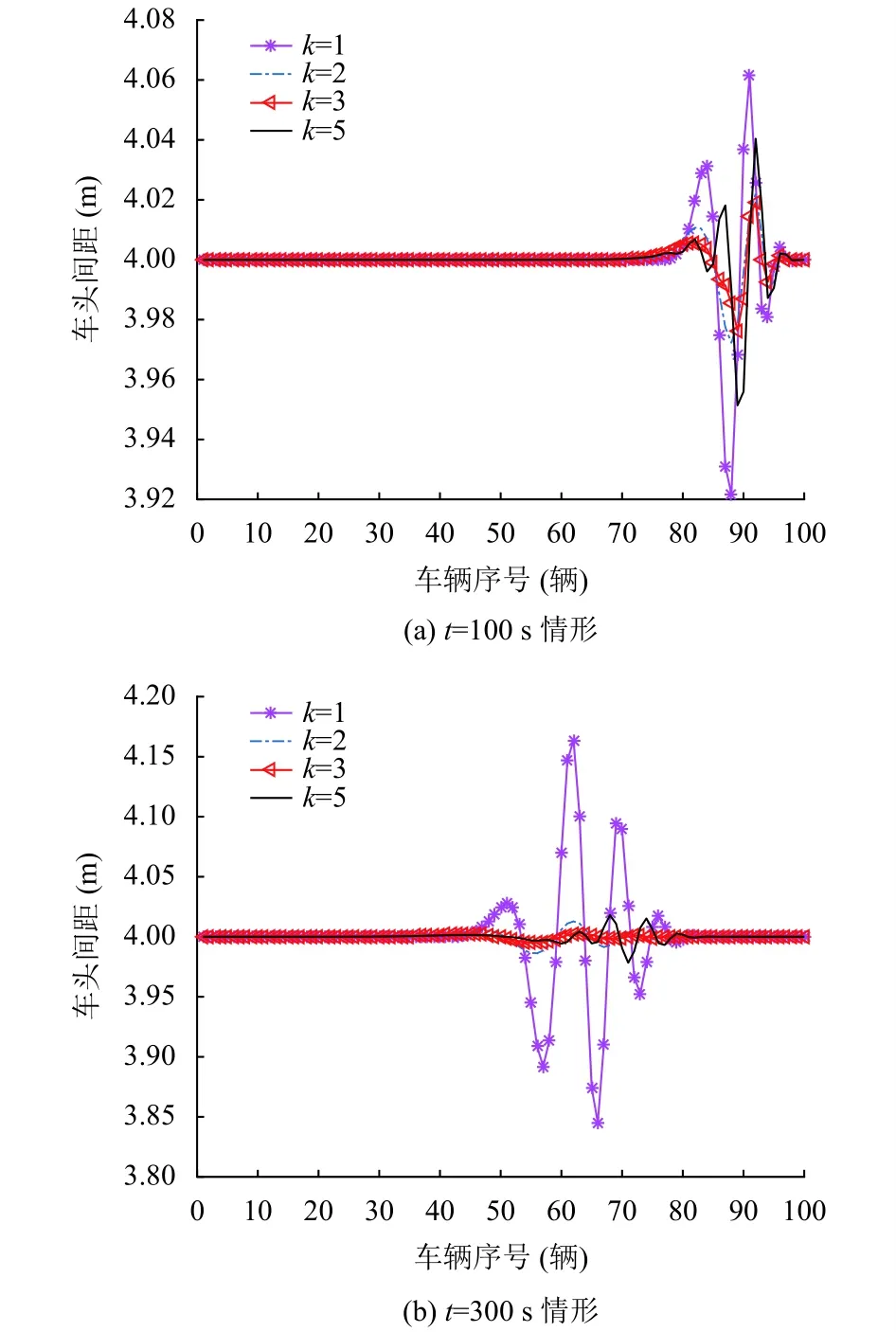
圖7 不同k 值下車頭間距變化對比圖
對第75輛車, 第80輛車和第85輛車的運動情況進行采樣, 并繪制不同k值下的車速分布對比圖(即圖8).可以明顯發現隨著時間的推移, 當我們考慮的前車信息過少(k=1或者k=2)或者過多時(k=5), 車輛的速度的波動幅度都會增加, 而當我們考慮合適的前車數量時(k=3)車輛速度的波動幅度會隨著時間推移逐漸變小, 交通流也會逐漸恢復穩定.因此在跟馳模型中, 考慮合適數量的前車的行駛信息對跟馳車流的穩定性有實際意義.
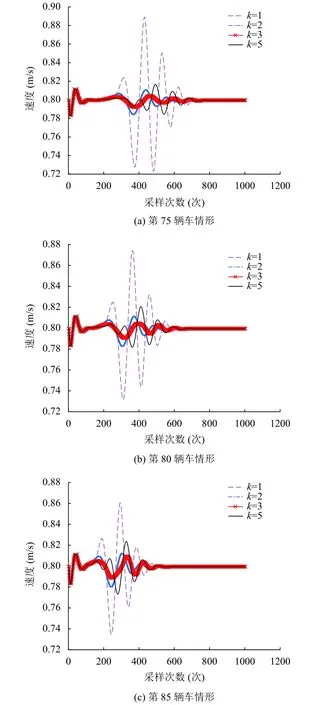
圖8 不同k 值下車速分布圖
3.3 仿真環境3
將FVD模型, MVD模型, BLVD模型與BL-MVDAM模型進行速度波動率對比, 驗證引入后視效應和多車信息的跟馳模型的穩定性.
當前導車數量為1時, 設置參數為 λ=0.15, γ=0.2,ω=0.1,P=0.8; 當考慮多車時, 設置k=3, λ, γ, ω取值與仿真環境2使用同樣參數, 車輛初始狀態均與仿真環境1相同.對t=100 s,t=200 s,t=300 s時車速進行數據采集然后整理.圖9是不同采樣時刻下, FVD模型, MVD模型, OVCM模型, BLVD和BL-MVDAM模型速度波動率對比圖(包括平均速度波動率, 向上速度波動率和向下速度波動率).
對圖9進行分析, 可以看出來在不同的采樣時刻下FVD模型, MVD模型, OVCM模型以及BLVD模型的速度的波動率均較大, 并且隨著時間的推移, 其波動幅度越來越大, 表明在交通系統中, 擾動會一直發展,將會嚴重影響到交通系統的穩定性.而BL-MVDAM模型的波動率最小, 說明擾動對該模型影響較小, 并且隨著時間的推移, 可以在較短時間內對交通系統的擾動進行控制.因此可以證明在后視效應的前提下, 引入合理數量的多前車信息具有一定的實際意義.
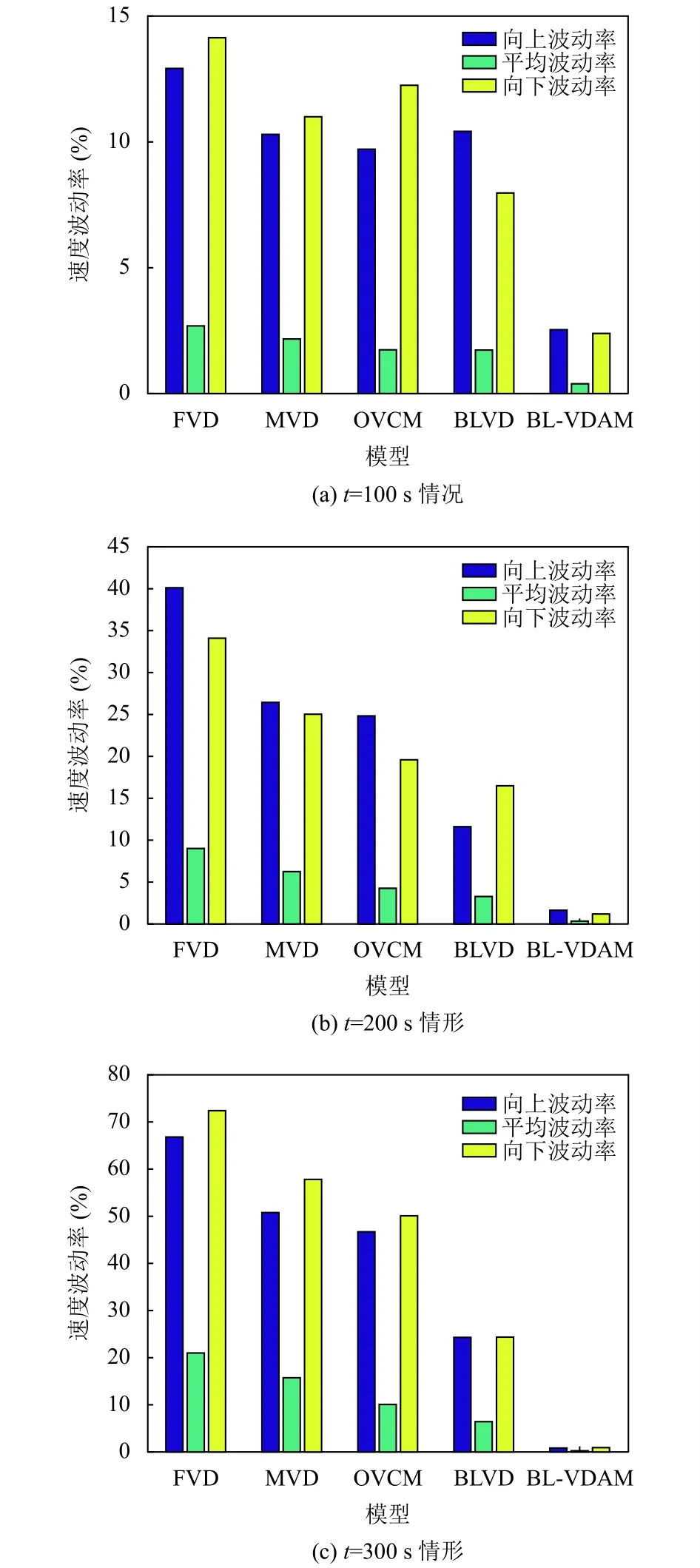
圖9 不同時刻各模型速度波動率對比圖
4 結束語
在車聯網的環境下, 基于車-車信息聯合的前提, 提出考慮后視效應和多前車信息的跟馳模型BL-MVDAM模型, 并且根據穩定性分析圖可以看出, BL-MVDAM模型的穩定性區域大于OV, FVD等模型的穩定性區域.根據數值模擬和仿真可以看出: 在實際交通流中考慮后視效應, 多前車的加速度信息, 速度差信息及歷史行駛信息是有實際意義的; 設置合理數量的前車信息(在我們的仿真模擬中選擇3輛車), 有利于增強跟馳車流的穩定性.但是本模型并不完善, 并沒有考慮不同車型以及車輛周邊環境等對駕駛的影響, 這將是本文以后的研究方向.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中外會展(2014年4期)2014-11-27 07:46:46
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
