基于AI 圖像識別的油電混動多旋翼無人機自動控制系統(tǒng)
2022-01-06 12:33:24饒成成
電子設(shè)計工程 2021年24期
饒成成
(廣東電網(wǎng)有限責(zé)任公司機巡管理中心,廣東廣州 510000)
旋翼式無人機具備很多傳統(tǒng)的固定翼無人機不具備的優(yōu)良低空性能,所以旋翼式無人機被廣泛地使用在社會的各個領(lǐng)域,例如農(nóng)業(yè)監(jiān)測和農(nóng)藥噴灑、地質(zhì)勘探及測繪等[1]。然而,現(xiàn)有旋翼類無人機的實際應(yīng)用情況,多以電動或油動旋翼類無人機為主,這些類型旋翼無人機存在一定缺陷。電動旋翼類無人機重載飛行時間較短,需要頻繁更換電池,且其充電時間較長,需要備有多個電池。油動旋翼類無人機適合長時間重載飛行,但油機發(fā)生墜機事故的風(fēng)險也較高[2-3]。
針對現(xiàn)有旋翼無人機動力不足而影響其使用性能的缺點,提出設(shè)計油電混合動力的多旋翼無人機控制系統(tǒng)。多旋翼無人機結(jié)構(gòu)簡單,受到廣泛關(guān)注并得到廣泛應(yīng)用。但傳統(tǒng)基于GPS 油電混合動力的多旋翼無人機控制精度較低,對無人機的控制無法達到設(shè)定目標,在此基礎(chǔ)上提出一種基于AI 圖像識別技術(shù)的多旋翼無人機油電混合動力自動控制系統(tǒng)。
1 硬件結(jié)構(gòu)設(shè)計
多旋翼飛行器由機載控制系統(tǒng)、地面控制平臺和動力系統(tǒng)組成,空載平臺工作范圍可控制飛行器自身姿態(tài)和航向;地面控制站任務(wù)是對多旋翼飛行器的飛行狀態(tài)進行監(jiān)控的同時,將飛行任務(wù)指令下發(fā)到飛行控制器;電力系統(tǒng)任務(wù)是對飛行器的運行提供電力[4]。飛行控制硬件系統(tǒng)的可靠性在很大程度上影響整個系統(tǒng)的穩(wěn)定性與安全性,動力系統(tǒng)的優(yōu)劣直接影響無人機運行時長[5]。
無人機飛行控制系統(tǒng)主要包括導(dǎo)航系統(tǒng)、飛行控制器、電源系統(tǒng)、無線通信模塊、電機驅(qū)動系統(tǒng),如圖1 所示。
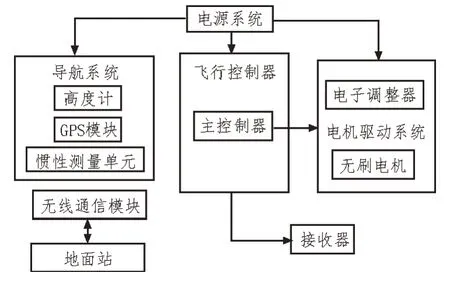
圖1 控制系統(tǒng)總體結(jié)構(gòu)
1.1 主控制器
主控機部分為飛行控制系統(tǒng)的核心,主控板的任務(wù)范圍包括以下幾個方面:采集與獲取傳感器數(shù)據(jù)信息,結(jié)合算法求出飛行器姿態(tài)、高度、位置等信息;接收遙控信號或下達的控制命令,再將其轉(zhuǎn)換為對應(yīng)的控制量,完成手動和自動操作并行;將獲取儲存的數(shù)據(jù)信息,借助無線方式傳達到基站[6-8]。其參數(shù)設(shè)置為:
1)包括最基本的電路,如5 V 轉(zhuǎn)3.3 V 電壓穩(wěn)定電路、復(fù)位電路以及啟動選擇電路;
2)所有通用I/O 口均可引出,便于連接外部設(shè)備;具有外接接口、支持模擬、下載以及調(diào)試功能;
3)具有電源指示LED 燈,以及連接到I/O 口用戶可使用的LED 燈;
4)配置IIC 接口,有利于數(shù)據(jù)的存儲;預(yù)留NandFlash 接口,增大儲存空間;
5)配備SD 卡座,便于數(shù)據(jù)的儲存和讀取,外形尺寸小為60 mm×47 mm,便于嵌入使用。
1.2 GPS定位模塊
對GPS 定位模塊調(diào)和后,控制器能夠獲得定位點的緯度、經(jīng)度信息。GPS 模塊結(jié)構(gòu)如圖2 所示。
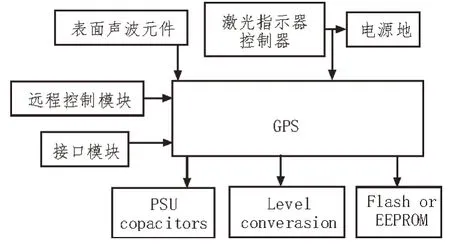
圖2 GPS模塊結(jié)構(gòu)
GPS 由RX 遠程模塊、SAW 表面聲波元件、LDO激光指示器控制器、PSU copacitors、Level converasion以及一系列接口組成,接口組成如表1 所示。
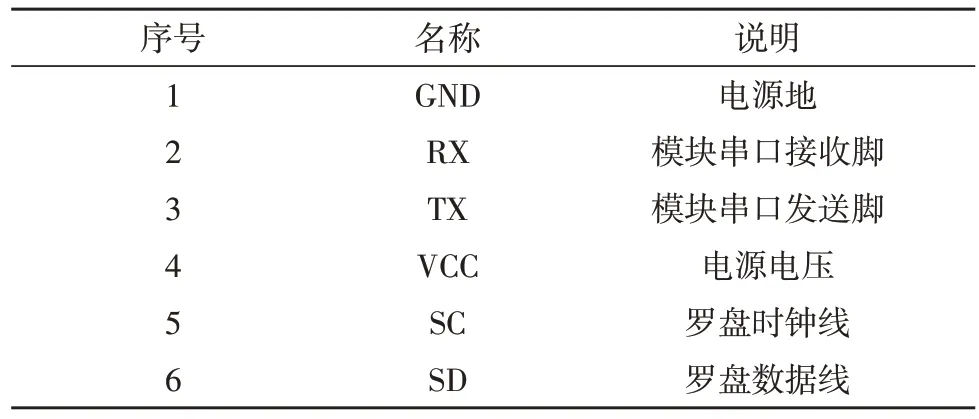
表1 GPS模塊接口組成
1.3 油電混合自動控制動力模塊
油電混合動力模塊的組成包括油動和電動模塊。將油電動力組合在一起,發(fā)揮其優(yōu)勢性能,是一種復(fù)合動力模塊,隸屬于油電混動多旋翼無人機自動控制系統(tǒng)[9-10]。油電混合動力模塊按照連接方式的不同,分為串聯(lián)式油電混合動力模塊、并聯(lián)式油電混合動力模塊和混聯(lián)式油電混合動力模塊[11-12]。油電混合動力模塊安置在多旋翼無人機上,多旋翼無人機的設(shè)計根據(jù)結(jié)構(gòu)特點,設(shè)計成串聯(lián)、并聯(lián)和混聯(lián)動力3 種布置形式。電機和油電混合動力模塊的基本設(shè)計結(jié)構(gòu)如圖3、4 所示。
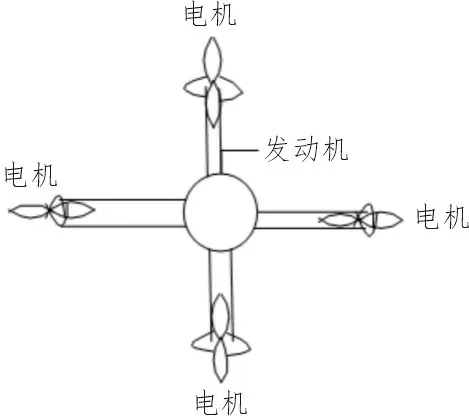
圖3 電機模塊構(gòu)造
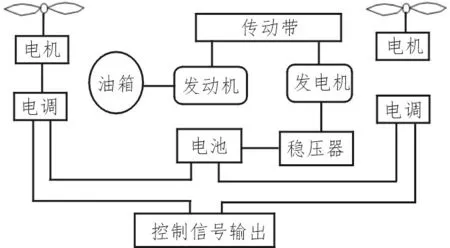
圖4 油電混合動力結(jié)構(gòu)
硬件系統(tǒng)設(shè)計中,包括機載系統(tǒng)、GPS 定位模塊、油電混合動力模塊以及基礎(chǔ)電源電路、傳感設(shè)備、檢測設(shè)備等。采用傳感器獲取與存儲數(shù)據(jù),GPS定位模塊通過控制器獲得數(shù)據(jù),處理器調(diào)和與數(shù)據(jù)處理,可獲得定位點的緯度、經(jīng)度信息[13]。將處理后的相關(guān)數(shù)據(jù)交付給控制系統(tǒng),為油電混合動力模塊提供基礎(chǔ)數(shù)據(jù)。
2 軟件設(shè)計
2.1 PID控制算法
PID控制算法是對飛行器自動控制中相關(guān)數(shù)據(jù)參數(shù)的校正與處理。在控制中,PID 算法的表達式為:

式中,P(t) 代表控制器的輸出;kp代表數(shù)據(jù)控制器的比例系數(shù);T1代表初始控制器積分時間;TD代表最終的控制器積分時間[14-16]。
對式(1)進行離散化處理操作,通過差分方程代替微分方程的方式,將微分項用增量式、積分項求和,得到:

式中,k代表采樣序號;E(k-1)代表第k-1 次采樣偏差;T代表控制器積分時間。
通過PID 控制算法有效縮短無人機多旋翼控制時間,更好地實現(xiàn)精確化控制。
2.2 基于AI圖像識別的無人機多旋翼控制
AI 圖像識別技術(shù)借助計算機對圖像進行處理,使計算機能像人一樣辨別圖像。AI 圖像識別原理如圖5 所示。
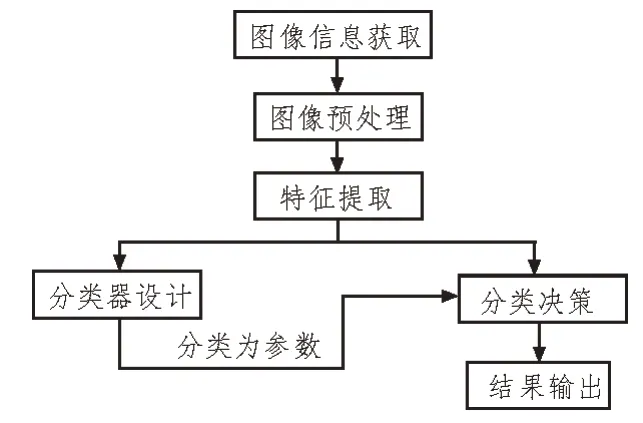
圖5 Al圖像識別原理
在圖像識別過程中,首先獲取圖像信息,通過傳感器把聲音、光線等信息轉(zhuǎn)換為電子信號;然后進行圖像信息的預(yù)處理,主要是指對圖像進行去噪、變換和平滑等操作;提取圖像特征。最后設(shè)計分類器和分類判定,其中設(shè)計分類器是基于訓(xùn)練的識別,并對圖像的大小、形狀、顏色等特征進行分析、判斷,輸出識別結(jié)果[17]。
根據(jù)無人機航向、姿態(tài)等信息,采用PID 控制算法,設(shè)計多旋翼控制流程,如圖6 所示。
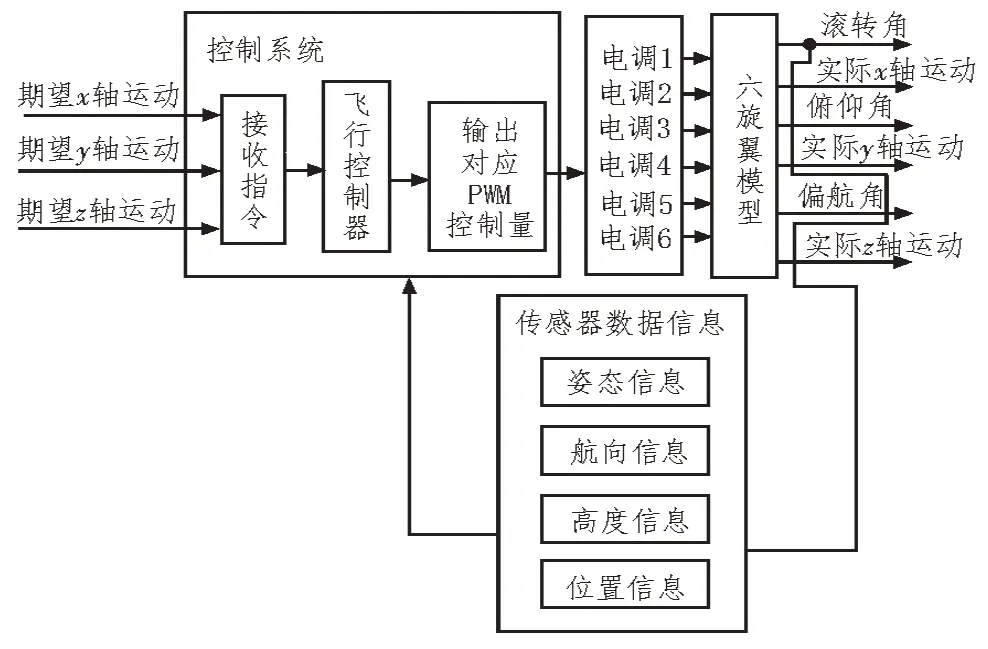
圖6 多旋翼控制流程
利用遙控器或地面站發(fā)出指令,飛行器接收到指令信號后由控制器控制,控制器接收傳感器數(shù)據(jù)后解算出的姿態(tài)、航向、高度和位置等信息,將期望值和反饋值進行差分運算,得到偏差量,借助相關(guān)控制算法計算出控制量對應(yīng)的PWM 信號,電調(diào)按照不同的PWM 輸出電流對電機相應(yīng)的轉(zhuǎn)速進行相關(guān)控制,改變六旋翼的姿態(tài)效果。姿態(tài)的變化能夠?qū)ζ湮恢卯a(chǎn)生影響,位移的變化最終也是借助姿態(tài)的變化體現(xiàn),姿態(tài)與位移相互聯(lián)系。垂直提升和下降依靠控制油門大小進行控制。
2.3 自動控制流程
多旋翼無人機控制流程,如圖7 所示。
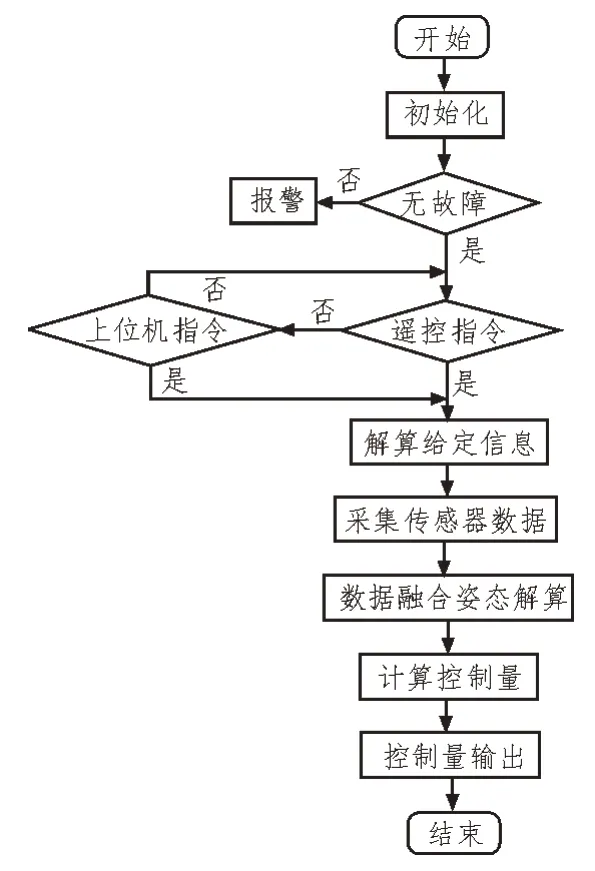
圖7 多旋翼無人機控制流程
主控制器元件開始運行后,接口配置、傳感器、控制裝置元件也被啟動,獲取初始化數(shù)據(jù),檢測機體狀態(tài)與通信數(shù)據(jù),若出現(xiàn)異常,則報警;飛行器自檢過程完成后,能夠?qū)Φ孛嬲景l(fā)出的控制指令進行接收,控制器采集到傳感器的數(shù)據(jù)信息,經(jīng)由濾波融合等相關(guān)處理過程之后,進行飛行器的姿態(tài)、位置、高度等信息的解算操作,將得到的信息和給定值作比較,借助PID 控制算法計算出控制數(shù)據(jù),完成飛行任務(wù)。
3 實 驗
3.1 實驗操作
選擇DJIM600Pro 型無人機,設(shè)置在飛行器控制器內(nèi)的模擬器,模擬調(diào)參軟件,創(chuàng)建虛擬3D 環(huán)境,將無人機飛行數(shù)據(jù)傳達到PC 機。對無人機飛行姿態(tài)進行實時監(jiān)控,得到無人機經(jīng)緯度坐標、實時仿真速度、無人機與起飛點的相對距離等飛行數(shù)據(jù)。
3.2 實驗結(jié)果與分析
設(shè)定控制多旋翼無人機的選擇角度為120°,以實際轉(zhuǎn)動為對照組,對比基于傳統(tǒng)GPS 油電混合多旋翼無人機自動控制系統(tǒng)與基于AI 圖像識別油電混合多旋翼無人機自動控制系統(tǒng)的無人機旋轉(zhuǎn)角與對照組旋轉(zhuǎn)角的關(guān)系。比較兩種控制系統(tǒng)下無人機飛行自動控制的精度。
兩種系統(tǒng)旋轉(zhuǎn)角對比結(jié)果如圖8 所示。
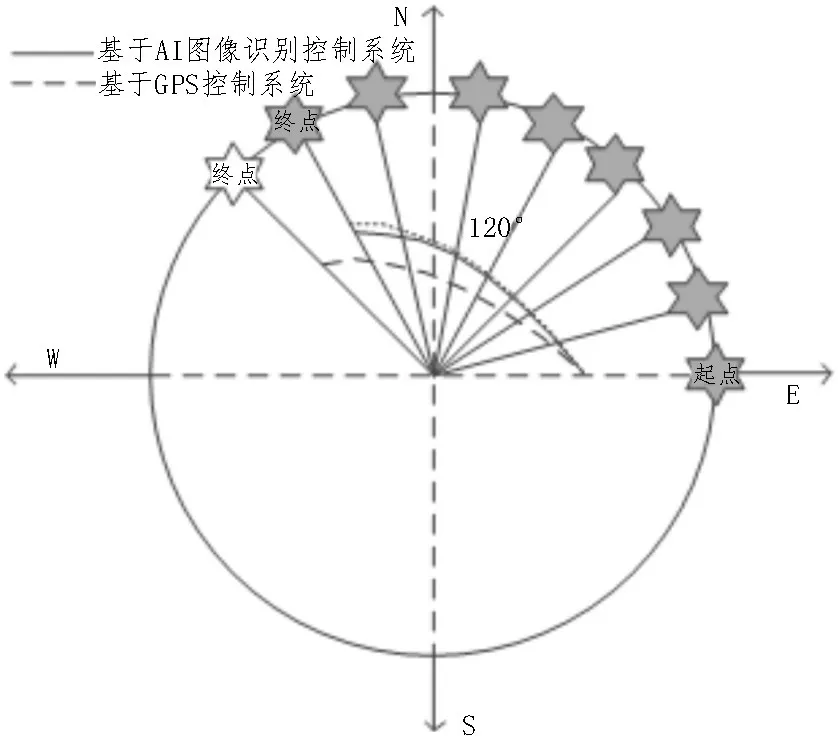
圖8 兩種系統(tǒng)旋轉(zhuǎn)角對比結(jié)果
由圖8 可知,從0 旋轉(zhuǎn)到120°情況下,基于GPS定位下控制下無人機的旋轉(zhuǎn)角超過120°,基于AI 圖像識別的選擇角與對照組差值小于基于GPS 的旋轉(zhuǎn)角。由此可知,使用基于AI 圖像識別控制系統(tǒng)旋轉(zhuǎn)角控制效果較好。
分別使用兩種系統(tǒng)分析控制時間,對比結(jié)果如表2 所示。
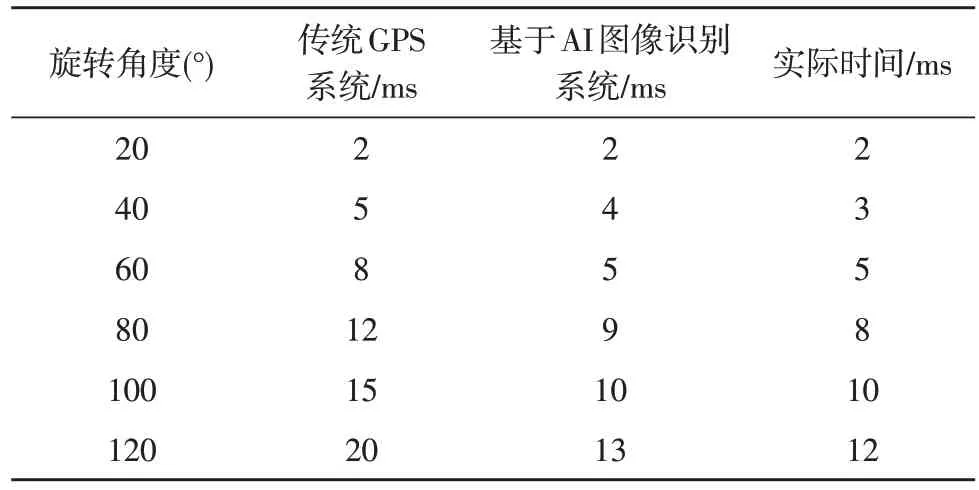
表2 兩種系統(tǒng)控制時間對比
由表2 可知,使用GPS 系統(tǒng)在不同旋轉(zhuǎn)角度下與實際所用時間不一致。當(dāng)旋轉(zhuǎn)角度依次為20°、40°、60°、80°、100°、120°時,控制時間比實際所用時間分別多0 ms、2 ms、3 ms、4 ms、5 ms、8 ms。而采用所提系統(tǒng)在旋轉(zhuǎn)角度為40°、80°、120°時,控制時間比實際所用時間均多1 ms。
4 結(jié)束語
基于AI 圖像識別的油電混動多旋翼無人機自動控制系統(tǒng),通過對主控制器和GPS 定位模塊,以及控制無人機多旋翼旋轉(zhuǎn)角度的設(shè)計,將油電混合,結(jié)合PID 控制算法校正無人機飛行數(shù)據(jù),改善傳統(tǒng)系統(tǒng)耗時長的問題,在AI 圖像識別原理基礎(chǔ)上,控制無人機多旋翼,完成油電混動多旋翼無人機自動控制系統(tǒng)設(shè)計。然而該系統(tǒng)也存在一定缺點,在以后研究中也要注意對不足之處的改善。