雙探棒式海纜路由及埋深探測系統設計
2022-01-07 07:52:44楊永上海東華建設管理有限公司
珠江水運 2021年23期
◎楊永 上海東華建設管理有限公司
在海纜定位領域中,路由探測(Routing detection)和埋深探測(Depth detection)問題是研究者最為關注的問題之一。路由探測即探測獲知海纜在海底的鋪設位置以及海纜在海底的鋪設軌跡。埋深探測即探測獲知海纜在海底的鋪設深度。
1.海纜的探測方法
現如今,海纜的探測手段以有無源分為有源探測法和無源探測法。前者有以下兩種方法:①交流磁場法;②絕對磁場法。后者有以下兩種方法:①聲和光學探測法;②金屬探測法。
金屬探測法是并不常用。使用探測金屬對海纜的位置進行探測,該方法優勢在于不必添加信號即可探測海纜的信息。但是其缺點同樣明顯:無法探測一米以外的海纜位置。所以依然存在很大的改進空間。聲學和光學探測法是利用聲吶或者攝像機完成探測任務。通過聲吶發出聲波以及攝像機完成圖像采集的方式來獲得海纜的路由,同時在經過人工測繪后,完成海纜走向示意。但是該方法的缺點為無法精準定位海纜位置以及成本高昂難以實現普及。絕對磁場法需要提前在海纜鋪設前加設直流信號,使用磁場探測設備來追尋路由位置。該方法具有靈敏性高,便于探測的特點,但是缺點同樣明顯:若海底環境復雜,磁場雜且多,那么就會無法探測到海纜路由的情況。交流磁場探測法也是在海纜中加設信號,利用探棒來確定海纜位置,具體過程為,信號會釋放電壓信號,探棒也會釋放相同的信號,在兩者相靠近時,會被探棒捕獲,之后經過人工分析后,即可判斷海纜的信息。但是該技術對工作人員的專業能力要求高,且技術存在改進的地方,沒有發展成熟,仍然需要進一步的分析。
2.系統架構介紹
2.1 方案運行思路
步驟為:第一步,探棒發射信號在布設海纜的海洋中尋找海纜發出的信號。第二步,根據探棒捕捉到的信號來判斷海纜的信息。第三步,感應線圈的移動形式可以初步獲取海纜的走向信息。根據信息判斷海纜位置。第四步,根據以上信息獲取埋深位置。
2.2 系統結構
如圖1所示,系統包括探棒感應模塊1;濾除干擾信號模塊2;峰值信號提取模塊3;核心處理器模塊4;鍵盤模塊5;液晶顯示模塊6;電源模塊7。
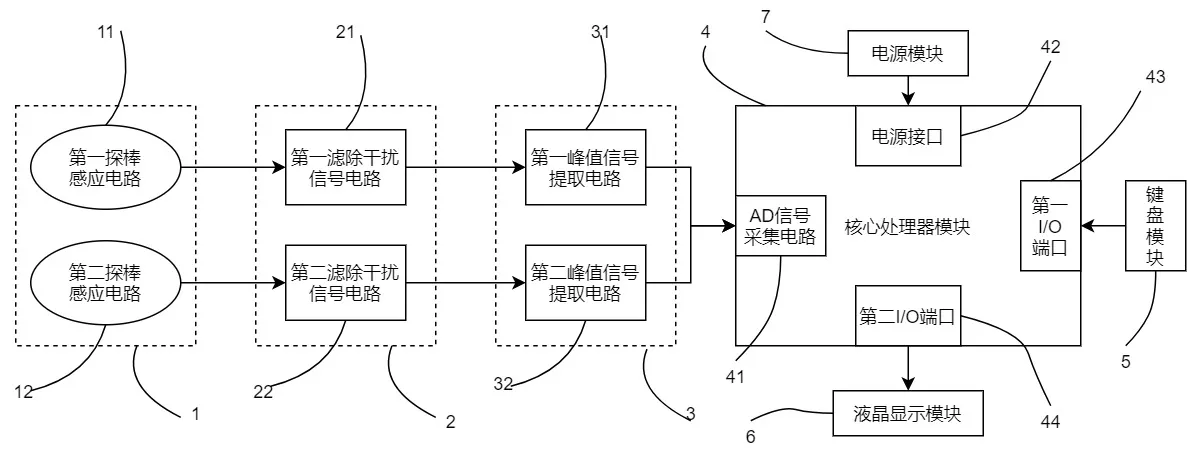
圖1 系統結構圖
2.3 系統運行流程
聯系順序為:第一探棒感應電路11的連接第一濾除干擾信號電路21連接第一峰值信號提取電路31;第二探棒感應電路12連接第二濾除干擾信號電路22連接第二峰值信號提取電路32;以上連接分別為輸入輸出聯輸入。且第一峰值信號提取電路31的輸出端與第二峰值信號提取電路32的輸出端分別連接AD信號采集電路41的輸入端,鍵盤模塊5連接核心處理器模塊4的第一I/0端口43,核心處理器模塊4的第二I/0端口44連接液晶顯示模塊的輸入端,電源模塊7通過核心處理器模塊4的電源接口42分別連接探棒感應模塊1、濾除干擾信號模塊2.峰值信號提取模塊3,核心處理器模塊4、鍵盤模塊5和液晶顯示模塊6。
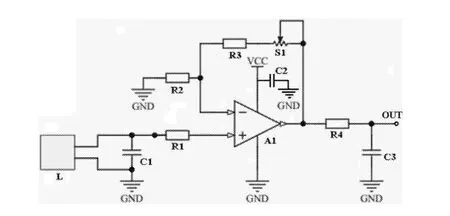
圖2 第一探棒感應電路圖
再次,峰值信號提取系統的重要組成部分為運算放大器,該放大器的電源采用單電源。
隨后,顯示模塊利用發光二極管完成,電源模塊由:電池(1個)、三端穩壓管—(1個)構成。
3.系統設計實現
3.1 硬件設計
硬件設計的內容如下:濾除干擾模塊的應用方式通過RLC串聯諧振電路完成。峰值信號的實現方法為運放對峰值信號正半周方法,之后使用RC電容濾波完成峰值信號的提取。之后,人機交互系統和單片機處理系統利用軟件編寫系統完成。該系統設計的外觀可見圖3。
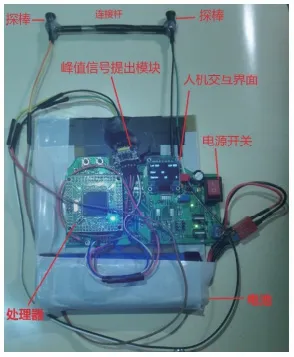
圖3 海纜探測系統外觀圖
3.2 軟件設計
探測系統的軟件組成為:顯示屏、海纜路由探測裝置、核算、校對誤差工具、埋深計算模塊、雙通道的AD采樣模塊組成。各個組成部分獨立編寫后,組合一起。詳情可見圖4。
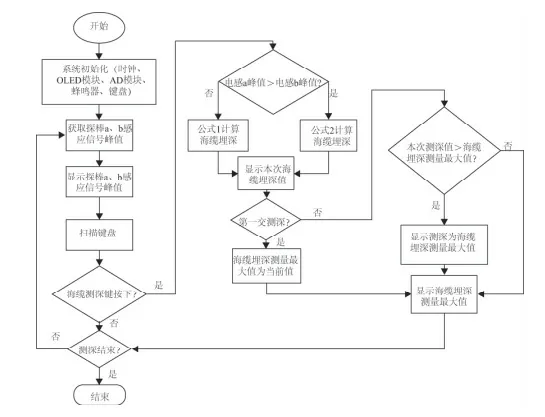
圖4 系統軟件流程圖
4.應用效果分析
經過改進后,該探測系統的誤差降低了22.2%,如今的誤差降低為10%左右,這表明,雙探棒式海纜路由及埋深探測系統設計是可以用于實踐的。除此之外,經過測試,該系統可以實現海纜探測,精準測出海纜的坐標、埋藏深度等信息。并且該設計中加入了誤差校對模塊,可以進一步提高探測的準確性。所以,實踐證明,雙探棒式海纜路由及埋深探測系統設計的結構較為簡單,但是可以實現對海纜的探測要求,且極大的降低了誤差,提高了探測效率。
5.結語
本文介紹了一種用于海纜探測的技術——雙探棒式的海纜探測設計。該設計的構成有:①探棒感應模塊;②濾除干擾信號模塊;③峰值信號提取模塊;④核心處理器模塊;⑤鍵盤模塊;⑥液晶顯示模塊;⑦電源模塊。使用方法為:編寫符合設計要求的系統并將這些模塊設置在某個硬件外觀中。在該設計完成組建后,用于實際海纜探測中發現,可以精準獲取海纜的信息。所以,本文研究的海纜探測系統可以有效獲得海纜埋深等信息,并且具有操作簡單,精準度高的特點。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00