城市軌道交通長隧道貫通誤差分析與測量方法應用
2022-01-08 03:06:30費先明
城市勘測 2021年6期
關鍵詞:測量
費先明
(北京城建勘測設計研究院有限責任公司,北京 100101)
1 引 言
近年來,隨著盾構技術的快速發展以及城市空間條件的限制,城市軌道交通工程盾構隧道的施工向著長距離施工推進。由于隧道的長度及測量精度又對最終的貫通精度起決定性的影響,因此對于長距離隧道施工,進行詳細的貫通誤差分析以及控制測量方案設計尤為關鍵。
2 工況介紹
合肥市軌道交通5號線麗水路站至清河路站盾構區間全長 1 746 m,線路由麗水路站向北引出后通過兩個小半徑轉彎曲線(R=400 m、R=550 m)轉至太和路,后沿太和路向北敷設至與清河路交口即清河路站結束,盾構由麗水路站始發至清河路站接收,線路及控制點位布置如圖1所示。線路沿線有北京城建勘測設計研究院有限責任公司布設的城市軌道交通二等GPS控制點,每年進行一次復測。盾構始發前,通過兩井定向聯系測量將地面控制成果引至地下LS1、LS2點,隨著盾構推進,隧道內有施工單位在管片腰部布設的強制對中觀測托盤。
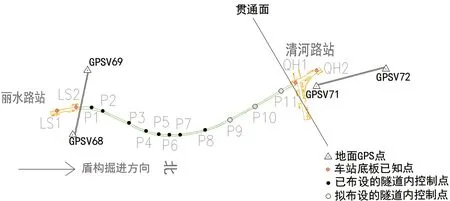
圖1 麗清區間線路及控制點位圖
3 貫通誤差影響分析
目前地面平面控制測量基本采用GPS測量方法,地面高程控制測量采用精密水準測量方法。根據工程實踐,高程貫通誤差基本較小,這里僅對平面貫通誤差進行分析,加之由于縱向貫通誤差只對線路長度略有改變,對貫通的意義不大,實際工作中僅考慮橫向貫通誤差。根據以上測量控制設計,在進行橫向貫通誤差配賦時,主要按照地面控制測量、聯系測量、地下精密導線測量三部分不等精度來考慮[1]。設三部分測量誤差影響互相獨立,則由誤差傳播定律得:
(1)
式中:m1—地面控制測量引起的橫向中誤差;
m2—聯系測量引起的橫向中誤差;
m3—地下導線測量引起的橫向中誤差;
mG—橫向貫通中誤差。
城市軌道交通工程隧道橫向貫通極限誤差為 100 mm[2],取極限誤差等于2倍中誤差,則橫向貫通中誤差為 ±50 mm。根據相關文獻及工程實際[1],設m1∶m2∶m3=1∶1∶1.8,如需隧道順利貫通則需:
(2)
即m1≤21.84 mm,m2≤21.84 mm,m3≤39.31 mm。

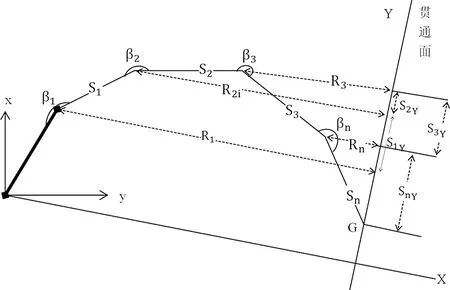
圖2 橫向貫通誤差分析示意圖

則貫通面G點的坐標可按下式計算:
(3)
而各邊坐標方位角是各站所測轉角的函數,即:
(4)
只考慮地下精密導線測量誤差對貫通橫向誤差的影響,則貫通點G在坐標軸x、y軸上的誤差分別為:
(5)
當等精度測角、測距時,上式可簡化為:
(6)
式中:RiX為各測站至貫通面的距離;
SiY為各邊在貫通面上的投影長度;
mβ為測角中誤差;

上式雖按支導線推出,但同時考慮了側邊及測角誤差對橫向貫通的影響,比較全面,這對曲線隧道精度估算尤為重要。
4 工程實例


RiX及SiY值計算表 表1


=±43.6 mm
(7)

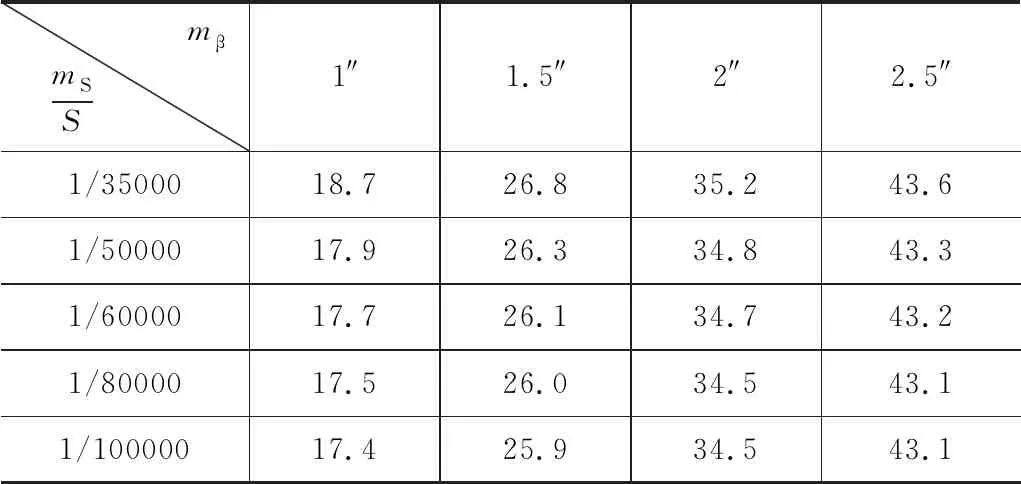
麗清區間地下導線不同測角及側邊精度對貫通誤差的影響 表2

自2018年4月28日~2018年11月6日,我們根據盾構掘進進度,對麗水路站進行了3次聯系測量和麗清區間左線隧道內控制點測量,成果穩定,結果如表3、表4所示。2018年12月3日對新增加的隧道內控制點P8進行測量,經比較發現由麗水路站車站底板控制點引出的洞內控制點各站測量角度比前3次測量角度均偏小,導致隧道內控制點P6-P7方位角較前次偏小36″,若使用更新過的控制點對成型管片姿態進行測量,結果表明水平偏差最大的774環將偏左 96 mm,接近 100 mm的控制值。
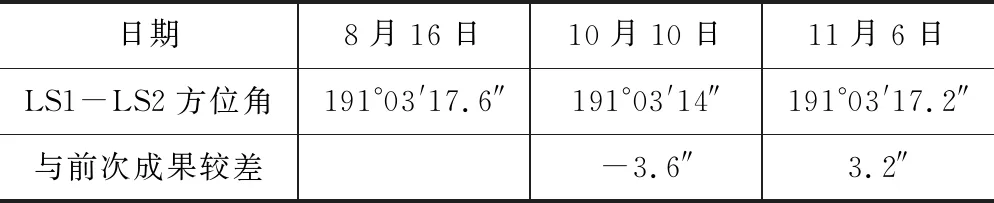
麗水路站底板點三次聯系測量成果 表3
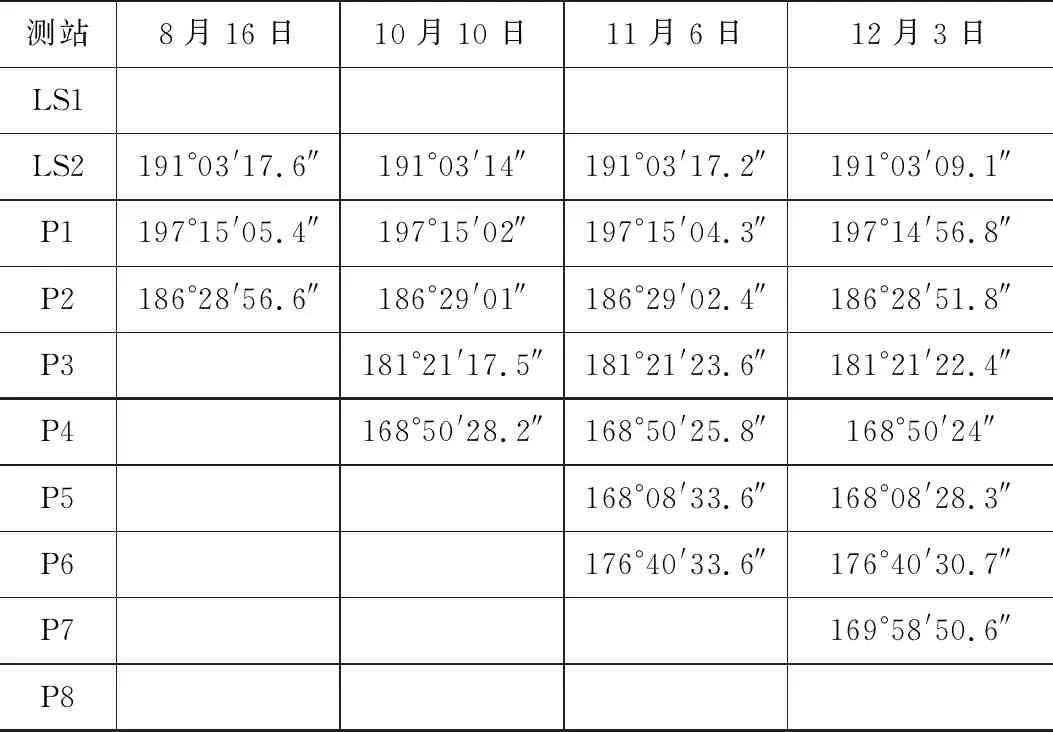
麗清區間左線隧道內控制點角度測量值 表4
在隧道還剩約1 000 m,僅考慮P6-P7方位角偏差36″的影響下,隧道橫向貫通偏差:
m67G=(m67/ρ)×s=174.5 mm
(8)
已嚴重超出規范規定的100 mm貫通誤差限值。若將地下導線測量引起的貫通中誤差m3≤39 mm平均分配,即P6-P7方位角中誤差和后續地下導線測量引起的貫通中誤差均為 27.5 mm。在還剩5個測站且隧道基本為直伸形時,采用±0.5″、0.6 mm+1 ppm高精度儀器多測回測量的情況下,后續5站引起的貫通中誤差容易控制在 27.5 mm以內,即要求P6-P7方位角偏差引起的貫通誤差中誤差在控制值內即可,通過第三節分析可知:

=41 mm
(9)
通過式(8)反算得P6-P7方位角中誤差不應大于8.4″。為確保P6-P7方位角準確,我們采用了雙導線測量及陀螺定向測量方法對隧道內P7-P8方位角進行檢核(由于P7-P8為長邊且與P6-P7為鄰邊故選擇該邊檢核)。
由于雙導線測量方法可大量增加網的多余觀測量、增加導線的閉合檢核條件、提高網的整體強度和精度[4],因此在支導線測量及基礎上,我們增加了雙導線測量方法,對隧道內P7-P8的方位角進行檢核,檢核成果如表5所示。
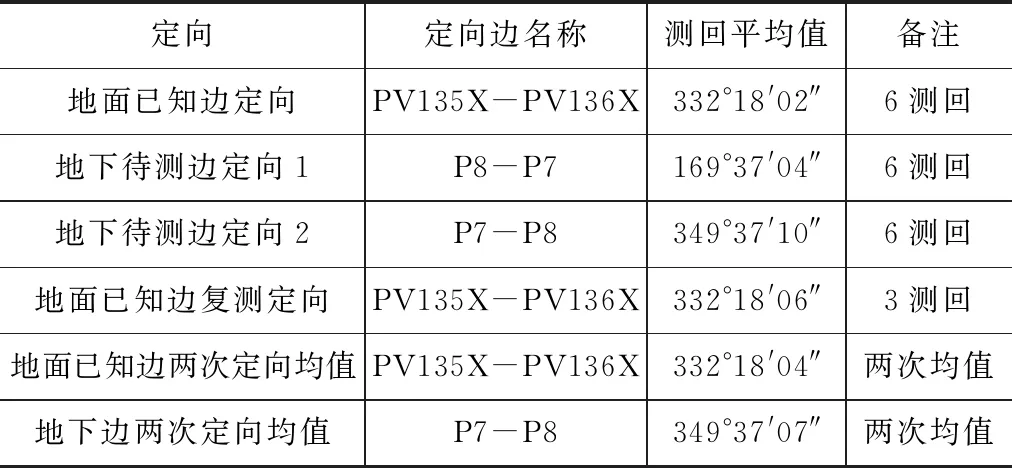
陀螺定向數據表 表5
本次陀螺定向采用HGG05型陀螺儀,一次定向中誤差(1σ)≤5″。定向過程如下:
(1)在控制邊進行6測回定向測量,標定儀器常數;
(2)在待測邊正反向分別進行6測回定向測量;
(3)在原控制邊進行3測回定向測量,以兩次控制邊測量結果檢驗儀器的穩定性和精度,確保陀螺定向成果準確可靠;
(4)地下定向邊坐標方位角計算[5~7],結果如表6所示。

不同方法測得的P7-P8坐標方位角成果表 表6
將單導線、雙導線、陀螺定向的P7-P8坐標方位角進行比對,如表6所示。結果顯示方位角互差最大值為13″,取3個成果平均值后可滿足前述方位角中誤差不大于8.4″的要求,在后續盾構基本為直線且保證測量精度的情況下,可以保證隧道順利貫通。最終取P7-P8坐標方位角349°19′51″。2020年4月,麗清區間左線順利貫通,貫通誤差橫向為 31 mm,高程為 5 mm。后經分析第4次隧道內控制點聯測與前3次差值較大主要原因為天氣變冷,洞口環境變化導致內外溫差大導致空氣密度變化劇烈、折光影響異常顯著,嚴重影響了照準精度,加之進洞就是“S”線型區段,導線邊太短,放大了環境因素影響。
5 結 論
(1)隧道長度對導線測量精度要求及橫向貫通誤差起決定性影響。
(2)對于大致直伸形隧道,測邊精度對于橫向貫通中誤差影響非常小,實際測量應提高邊長,減少測站數以提高測角精度、減小橫向貫通誤差。
(3)布設隧道內控制點應使導線邊視線偏離隧道管片內壁 50 cm以上為宜,尤其針對進洞就是“S”線型區段的隧道,更需注意洞口環境變化及旁折光影響。
(4)由于民用陀螺定向精度及陀螺定向精度受各方面因素影響,未有大量實驗數據,建議陀螺定向結果僅作為校核或與單導線及雙導線成果取平均值后使用。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
