光電經(jīng)緯儀坐標(biāo)系統(tǒng)一方法研究
2022-01-12 10:24:06張逸飛夏偉東
測控技術(shù) 2021年12期
張逸飛,馮 燦,夏偉東
(中國商用飛機(jī)試飛中心,上海 200120)
作為一種大范圍、遠(yuǎn)距離的自動跟蹤光電測量儀器,光電經(jīng)緯儀在國產(chǎn)民機(jī)試飛測試中發(fā)揮著重要作用,被廣泛應(yīng)用于飛機(jī)最小離地速度測量、最大商載動著陸、濺水試驗(yàn)等重要試飛科目中,為試驗(yàn)提供目標(biāo)位置、速度和姿態(tài)測量手段。
光電經(jīng)緯儀測量能力強(qiáng)大,功能豐富。在測量方面,可以提供高精度的空間位置、速度、姿態(tài)結(jié)果;在跟蹤功能方面,具備多種跟蹤模式,包括可視化自動跟蹤和GPS引導(dǎo)跟蹤。其中,GPS引導(dǎo)跟蹤是一種利用飛機(jī)的實(shí)時GPS位置,進(jìn)行超視距引導(dǎo)的一種跟蹤模式,在多云天氣下可以輔助快速捕獲飛機(jī)目標(biāo),進(jìn)而擴(kuò)展測量范圍。
根據(jù)光電經(jīng)緯儀的測量和跟蹤原理,如果將經(jīng)緯儀測量結(jié)果和GPS測量結(jié)果相比對,需要將兩種測量系統(tǒng)的測量坐標(biāo)系相統(tǒng)一;同樣的,如果使用GPS引導(dǎo)跟蹤功能,也需要統(tǒng)一兩種測量坐標(biāo)系。因此,完成坐標(biāo)系統(tǒng)一工作,是光電經(jīng)緯儀正常工作的前提條件。
目前國內(nèi)外專門進(jìn)行坐標(biāo)系統(tǒng)一方法研究的成果不多,主要原因在于大多數(shù)光電經(jīng)緯儀建設(shè)屬于固定式經(jīng)緯儀,在建設(shè)經(jīng)緯儀之初,可以通過良好的機(jī)械加工,以實(shí)現(xiàn)明確的坐標(biāo)系轉(zhuǎn)換關(guān)系,不需要特殊方法來實(shí)現(xiàn)坐標(biāo)系統(tǒng)一。
在部分移動式的光電經(jīng)緯儀系統(tǒng)中,國內(nèi)外常用的坐標(biāo)系統(tǒng)一方法[1-5]是:首先將光電經(jīng)緯儀調(diào)平,并獲取其經(jīng)緯儀坐標(biāo)系X軸相對GPS坐標(biāo)系北向的夾角;而后測量經(jīng)緯儀坐標(biāo)系原點(diǎn)在GPS坐標(biāo)系下的經(jīng)緯度坐標(biāo),以及地心空間直角坐標(biāo)系的坐標(biāo);最后根據(jù)經(jīng)緯儀的大地經(jīng)緯度和真北向夾角,依據(jù)剛體旋轉(zhuǎn)公式來計(jì)算旋轉(zhuǎn)矩陣,獲取兩坐標(biāo)系統(tǒng)一的變換公式。
但此方法嚴(yán)重依賴光電經(jīng)緯儀的調(diào)平,在嚴(yán)苛的工作環(huán)境下,如在傾斜較大的路面上布設(shè)經(jīng)緯儀,或者經(jīng)緯儀的調(diào)平系統(tǒng)無法正常工作時,該方法就無法進(jìn)行有效的坐標(biāo)系統(tǒng)一。為了解決這一問題,有研究人員通過[6]借助基于雙光柵干涉產(chǎn)生莫爾條紋測量扭轉(zhuǎn)角的方法對經(jīng)緯儀姿態(tài)進(jìn)行位置測量,但該系統(tǒng)較為復(fù)雜;還有部分艦載光電經(jīng)緯儀[7-8]方面的研究,也遇到船艦平臺無法調(diào)平的問題,他們通過在光電經(jīng)緯儀基座上加裝環(huán)境姿態(tài)測量系統(tǒng),該系統(tǒng)采用GPS與慣導(dǎo)組合方式,實(shí)時獲取經(jīng)緯儀底座的位置和艦載平臺的姿態(tài),進(jìn)而實(shí)現(xiàn)坐標(biāo)系的統(tǒng)一。
為了解決經(jīng)緯儀必須調(diào)平的問題,也提出了兩種方法,分別是直接轉(zhuǎn)換法和場地標(biāo)定法。其中直接轉(zhuǎn)換法采用加裝慣導(dǎo)系統(tǒng)的方法,對經(jīng)緯儀與GPS坐標(biāo)系的姿態(tài)進(jìn)行測量,具有不依賴調(diào)平精度和快速轉(zhuǎn)換的特點(diǎn),但增加了系統(tǒng)成本;場地標(biāo)定法不增加系統(tǒng)構(gòu)成,通過在經(jīng)緯儀測量場內(nèi)布設(shè)一系列標(biāo)志點(diǎn),并對標(biāo)志點(diǎn)進(jìn)行瞄準(zhǔn)記錄,繼而計(jì)算坐標(biāo)系轉(zhuǎn)換關(guān)系,該方法兼具不依賴調(diào)平精度、快速轉(zhuǎn)換和低成本的特點(diǎn)。在實(shí)際工作中,可根據(jù)具體需要進(jìn)行方法選擇。
1 坐標(biāo)系基礎(chǔ)定義
光電經(jīng)緯儀坐標(biāo)系以其主要部件——二維轉(zhuǎn)臺的軸系為基準(zhǔn)而建立。二維轉(zhuǎn)臺是光電經(jīng)緯儀的機(jī)械加工基準(zhǔn),具有方位轉(zhuǎn)軸和俯仰轉(zhuǎn)軸,可以帶動光學(xué)設(shè)備進(jìn)行方位旋轉(zhuǎn)和俯仰旋轉(zhuǎn)。坐標(biāo)系原點(diǎn)設(shè)置在二維轉(zhuǎn)臺的兩旋轉(zhuǎn)軸交點(diǎn),Zb軸與方位轉(zhuǎn)軸重合,并指向天向,Xb軸位于方位轉(zhuǎn)軸垂直的平面,并指向方位碼盤0°方向,Yb軸與Zb軸、Xb軸垂直構(gòu)成右手坐標(biāo)系。
GPS系統(tǒng)所依賴的直角坐標(biāo)系稱為WGS-84坐標(biāo)系,如圖1所示,該坐標(biāo)系是一種國際上采用的地心坐標(biāo)系。坐標(biāo)原點(diǎn)為地球質(zhì)心,Zo軸指向BIH(國際時間服務(wù)機(jī)構(gòu))1984.0定義的協(xié)議地球極(CTP)方向,Xo軸指向BIH 1984.0的零子午面和CTP赤道的交點(diǎn),Yo軸與Zo軸、Xo軸垂直構(gòu)成右手坐標(biāo)系。

圖1 WGS-84坐標(biāo)系定義
根據(jù)坐標(biāo)系定義,兩個坐標(biāo)系都是空間直角坐標(biāo)系,因此兩個坐標(biāo)轉(zhuǎn)換關(guān)系可以使用矩陣形式表示,如式1所示,R矩陣表示兩坐標(biāo)系的旋轉(zhuǎn)關(guān)系,T矩陣表示兩坐標(biāo)系的平移關(guān)系。
坐標(biāo)系統(tǒng)一的目的就是解算出這樣一組矩陣形式的轉(zhuǎn)換公式:
Y=R·X+T
(1)
2 直接轉(zhuǎn)換法
WGS-84地心坐標(biāo)系是與地球固聯(lián)的坐標(biāo)系,而光電經(jīng)緯儀坐標(biāo)系是局部坐標(biāo)系,兩坐標(biāo)系之間的軸系角度關(guān)系無法直接測量,無法直接推導(dǎo)出旋轉(zhuǎn)矩陣。因此采用站心坐標(biāo)系作為中間坐標(biāo)系,分別獲取光電經(jīng)緯儀坐標(biāo)系到站心坐標(biāo)系的轉(zhuǎn)換關(guān)系和站心坐標(biāo)系到WGS-84坐標(biāo)系的轉(zhuǎn)換關(guān)系,最后聯(lián)立得到光電經(jīng)緯儀坐標(biāo)系到WGS-84坐標(biāo)系轉(zhuǎn)換矩陣公式。
這里,采用東北天坐標(biāo)系(ENU坐標(biāo)系)作為站心坐標(biāo)系。ENU坐標(biāo)系原點(diǎn)設(shè)置在光電經(jīng)緯儀坐標(biāo)系的原點(diǎn)位置上,Yg軸指向地理北極方向,Zg軸垂直地面指向天向,Xg軸與Zg軸和Yg軸垂直構(gòu)成右手坐標(biāo)系。
建立光電經(jīng)緯儀坐標(biāo)系和ENU坐標(biāo)系的轉(zhuǎn)換關(guān)系,需要獲取兩坐標(biāo)系軸系的三軸歐拉角。可以通過在光電經(jīng)緯儀轉(zhuǎn)臺基座上加裝慣性導(dǎo)航系統(tǒng),獲得光電經(jīng)緯儀姿態(tài)參數(shù),該組姿態(tài)參數(shù)便是三軸歐拉角,3個軸的角度可以用偏航角ψ、俯仰角θ、滾轉(zhuǎn)角φ定義。將三軸歐拉角帶入到光電經(jīng)緯儀坐標(biāo)系到ENU坐標(biāo)系的旋轉(zhuǎn)矩陣Rbg中,將光電經(jīng)緯儀坐標(biāo)系統(tǒng)一到ENU坐標(biāo)系下。光電經(jīng)緯儀坐標(biāo)系到ENU坐標(biāo)系旋轉(zhuǎn)矩陣可以按XYZ順序,即先沿Xb軸做滾轉(zhuǎn)運(yùn)動,再沿Yb軸做俯仰運(yùn)動,最后沿Zb軸做偏航運(yùn)動,兩個坐標(biāo)系就可以完全重合。轉(zhuǎn)換關(guān)系可以用式(2)表示:
(2)
其中,
Rbg=
(3)
其中,
(4)
式中,a為地球橢球長半軸長度,b為地球橢球短半軸長度。
(5)
分別獲取兩個坐標(biāo)系和中間坐標(biāo)系的轉(zhuǎn)換關(guān)系后,便可以將式(2)、式(5)聯(lián)立,獲得最終的轉(zhuǎn)換關(guān)系表達(dá)式:
(6)
從以上推導(dǎo)過程可以看出,該方法不依賴精密調(diào)平,可以在任意環(huán)境下,快速給出坐標(biāo)系轉(zhuǎn)換關(guān)系,但缺點(diǎn)是加裝慣性導(dǎo)航系統(tǒng)會給光電經(jīng)緯儀增加額外的成本。
3 場地標(biāo)定法
場地標(biāo)定法是一種不依賴慣性導(dǎo)航系統(tǒng)的坐標(biāo)系統(tǒng)一方法。該方法對場地內(nèi)一系列標(biāo)志點(diǎn)在WGS-84坐標(biāo)系下的坐標(biāo)進(jìn)行標(biāo)定,而后使用光電經(jīng)緯儀分別對該系列標(biāo)志點(diǎn)在經(jīng)緯儀坐標(biāo)系的坐標(biāo)進(jìn)行測量,進(jìn)而獲得標(biāo)志點(diǎn)在兩個坐標(biāo)系的坐標(biāo),最后通過算法對兩個坐標(biāo)系的轉(zhuǎn)換矩陣進(jìn)行解析。
3.1 標(biāo)志點(diǎn)測量
標(biāo)志點(diǎn)在兩個坐標(biāo)系下的測量,分兩步實(shí)施。
B=Rbo·A+Tbo
(7)
根據(jù)式(7),可以看出待求解的未知數(shù)共有9個,而每個標(biāo)志點(diǎn)可以提供3個方程,因此至少需要3個標(biāo)志點(diǎn)才能求解方程。但由于標(biāo)志點(diǎn)的坐標(biāo)測量存在誤差,為了減小隨機(jī)誤差,提高標(biāo)定精度,則應(yīng)盡可能增加標(biāo)志點(diǎn)的數(shù)量。此時,標(biāo)志點(diǎn)的數(shù)量超過3個,方程數(shù)量大于待求參數(shù)數(shù)量,該方程組變?yōu)槌ǚ匠探M。那么坐標(biāo)系轉(zhuǎn)換公式的求解,即轉(zhuǎn)化為對一組超定方程組的解的計(jì)算。
3.2 最小二乘法求解
超定方程組無一般意義上的解,但可以采用最小二乘解作為最優(yōu)解。根據(jù)最小二乘解的一般矩陣形式,可以按式(8)獲得轉(zhuǎn)換關(guān)系公式:
B=RboA+Tbo?
B-Tbo=RboA?
(B-Tbo)AT=RboAAT?
Rbo=(B-Tbo)AT(AAT)-1
(8)
根據(jù)式(8)獲得的Rbo是最小二乘形式下的最優(yōu)解。但需要注意的是,旋轉(zhuǎn)矩陣[13]是一種行列式為1的正交矩陣,但最小二乘法形式下的最優(yōu)解是無法保證其正交性的。為了保持旋轉(zhuǎn)矩陣的正交性質(zhì),采用第2種求解算法。
3.3 基于SVD的最小二乘算法
奇異值分解(Singular Value Decomposition,SVD)是一種自帶酉矩陣約束的奇異值分解算法[14],廣泛應(yīng)用在降維算法、推薦系統(tǒng)和自然語言處理等領(lǐng)域。為了保證最小二乘形式下的Rbo依然是正交矩陣,可以采用SVD進(jìn)行最小二乘求解。
可以證明[15],最小二乘解可以等效為以下表達(dá)式,即求解一個Rbo,使得矩陣(B-Tbo)TRboA跡的值最大化:
(9)
根據(jù)矩陣跡的基本性質(zhì)有:
tr(AB)=tr(BA)
(10)
那么:
tr((B-Tbo)TRboA)=tr(RboA(B-Tbo)T)
(11)
此時構(gòu)造H矩陣:
H=A(B-Tbo)T
(12)
然后,對H矩陣進(jìn)行SVD分解,得到兩個正交矩陣U和VT矩陣和對角矩陣Σ:
H=UΣVT
(13)
則式(11)可以變換為
tr(RboA(B-Tbo)T)=tr(RboH)=tr(RboUΣVT)
=tr(ΣVTRboU)
(14)
(15)
所以欲構(gòu)造一個最大的tr(ΣM),需要使得M矩陣的對角值均為1,而M矩陣又是正交矩陣,所以M矩陣為單位矩陣時,tr(ΣM)可以取得最大值,因此:
I=M=VTRboU?V=RboU?Rbo=VUT
(16)
可以根據(jù)式(16)計(jì)算得到最終的旋轉(zhuǎn)矩陣,該方法基于SVD求解最小二乘形式解,可以確保解為正交矩陣。
場地標(biāo)定法相較于直接轉(zhuǎn)換法,無需加裝慣導(dǎo)系統(tǒng),但需要對場地進(jìn)行一次標(biāo)定,設(shè)置一些均勻分布的場內(nèi)標(biāo)志點(diǎn)。如果標(biāo)志點(diǎn)可以重復(fù)使用,當(dāng)經(jīng)緯儀在場地內(nèi)移動布置,仍有一定數(shù)量的場內(nèi)標(biāo)志點(diǎn)可以被經(jīng)緯儀觀測到,那么則無需再次標(biāo)定,坐標(biāo)系統(tǒng)一可以快速實(shí)現(xiàn),所需時間和直接轉(zhuǎn)換法相當(dāng)。
4 試驗(yàn)與結(jié)論
為了驗(yàn)證方法是否有效,對一臺光電經(jīng)緯儀分別采用直接轉(zhuǎn)換法和場地標(biāo)定法進(jìn)行坐標(biāo)系轉(zhuǎn)換,最終通過GPS數(shù)據(jù)引導(dǎo)功能是否正常,或反算標(biāo)志點(diǎn)角度誤差大小來判斷方法有效性。試驗(yàn)中使用的光電經(jīng)緯儀具備慣性導(dǎo)航系統(tǒng),試驗(yàn)場地為上海浦東機(jī)場第四跑道。
4.1 直接轉(zhuǎn)換法驗(yàn)證
根據(jù)第2節(jié)中的方法,首先打開光電經(jīng)緯儀的慣性導(dǎo)航系統(tǒng),對經(jīng)緯儀坐標(biāo)系的姿態(tài)角進(jìn)行測量,而后再利用差分GPS設(shè)備測量經(jīng)緯儀的原點(diǎn)坐標(biāo)位置,并根據(jù)式(3)求出坐標(biāo)系的經(jīng)緯度,最后按照式(6)求出坐標(biāo)系轉(zhuǎn)換矩陣。完成坐標(biāo)系統(tǒng)一后,使用飛機(jī)空地遙測鏈路,將飛機(jī)的GPS位置實(shí)時發(fā)送至地面接收站,再通過地面光纖數(shù)據(jù)鏈路,將飛機(jī)GPS數(shù)據(jù)傳輸至光電經(jīng)緯儀,激活其GPS數(shù)據(jù)引導(dǎo)功能。
根據(jù)試驗(yàn)結(jié)果,當(dāng)飛機(jī)距離30 km時,通過GPS數(shù)據(jù)引導(dǎo)功能可以實(shí)現(xiàn)光電經(jīng)緯儀對飛機(jī)的自動跟蹤拍攝,這說明轉(zhuǎn)換矩陣精度滿足GPS數(shù)據(jù)引導(dǎo)功能需求,也證明直接轉(zhuǎn)換法可以有效獲取坐標(biāo)系轉(zhuǎn)換矩陣。
4.2 場地標(biāo)定法驗(yàn)證
根據(jù)第3節(jié)中場地標(biāo)定法流程,在具體試驗(yàn)中,首先對試驗(yàn)場地——浦東國際機(jī)場第四跑道進(jìn)行標(biāo)志點(diǎn)選取和標(biāo)定工作。
如圖2所示,在經(jīng)緯儀布點(diǎn)四周1 km內(nèi)選取9個標(biāo)志點(diǎn)后,用差分GPS系統(tǒng)測量這9個標(biāo)志點(diǎn)和光電經(jīng)緯儀原點(diǎn)的GPS坐標(biāo),并記錄數(shù)據(jù),如表1所示。
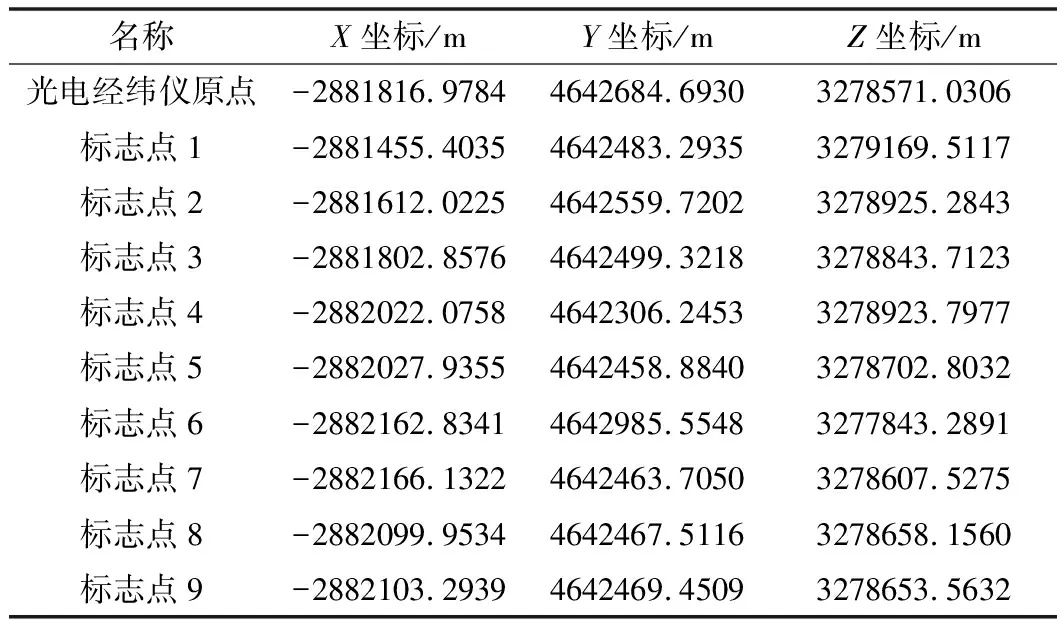
表1 光電經(jīng)緯儀原點(diǎn)及9個標(biāo)志點(diǎn)GPS坐標(biāo)
此時便得到了GPS坐標(biāo)系下的標(biāo)志點(diǎn)坐標(biāo)序列B,需要注意的是,在光電經(jīng)緯儀不具備測距單元時,可以根據(jù)各個標(biāo)志點(diǎn)與光電經(jīng)緯儀原點(diǎn)的GPS坐標(biāo),來輕松求取各標(biāo)志點(diǎn)到經(jīng)緯儀的絕對距離。
為了獲取光電經(jīng)緯儀坐標(biāo)系下的標(biāo)志點(diǎn)序列A,需要操作光電經(jīng)緯儀分別瞄準(zhǔn)9個標(biāo)志點(diǎn),此時首先測量瞄準(zhǔn)各個標(biāo)志點(diǎn)時對應(yīng)的方位角和俯仰角數(shù)據(jù)序列,而后結(jié)合各標(biāo)志點(diǎn)到光電經(jīng)緯儀的距離值,可以得到光電經(jīng)緯儀球坐標(biāo)系下的標(biāo)志點(diǎn)坐標(biāo)。如表2所示。
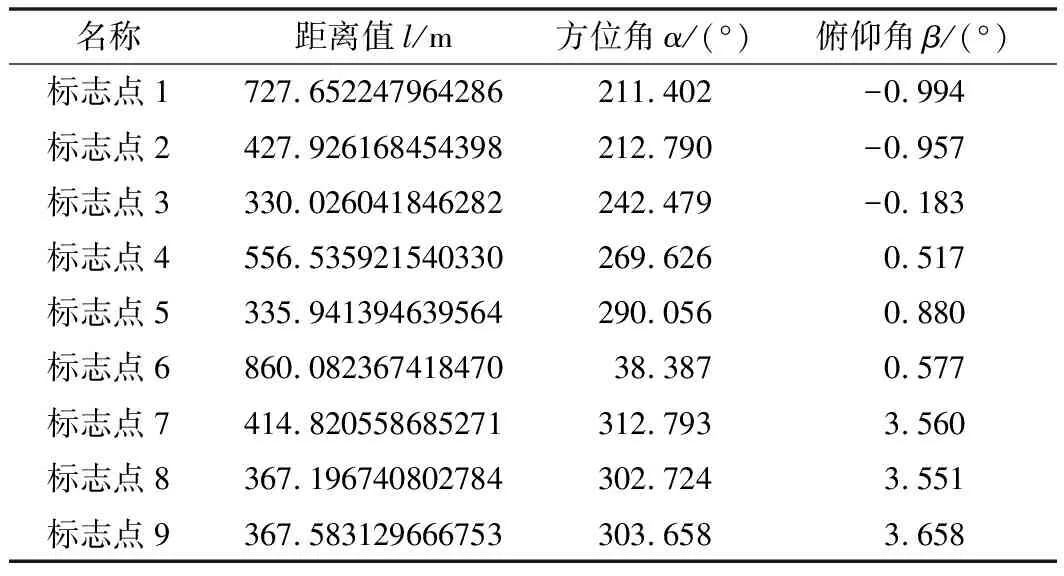
表2 光電經(jīng)緯儀瞄準(zhǔn)9個標(biāo)志點(diǎn)的轉(zhuǎn)臺角度值
此時,根據(jù)式(17),便可以將光電經(jīng)緯儀球坐標(biāo)系下的坐標(biāo)轉(zhuǎn)換為直角坐標(biāo)系下的坐標(biāo),獲得標(biāo)志點(diǎn)序列A:
(17)
獲得A、B坐標(biāo)序列后,根據(jù)章節(jié)3中提到的最小二乘法和基于SVD的最小二乘法,分別用這兩種算法求解轉(zhuǎn)換矩陣Rbo,結(jié)果如下:
最小二乘法下,Rbo表達(dá)式為

將其作為已知數(shù),反算方位角和俯仰角的均方根(RMS)誤差,可以得到方位角RMS誤差為0.0087°,俯仰角RMS誤差為0.0416°。
同樣的,使用基于SVD的最小二乘法計(jì)算,可得到轉(zhuǎn)換矩陣Rbo,表達(dá)式為

將其作為已知數(shù),反算方位角和俯仰角的RMS誤差,可以得到方位角RMS誤差為0.0073°,俯仰角RMS誤差為0.0418°。可以驗(yàn)證,該轉(zhuǎn)換矩陣為正交矩陣。
從以上結(jié)果可以看出,兩種算法計(jì)算出的矩陣Rbo表達(dá)式結(jié)果接近,且反算得到的誤差數(shù)值接近,兩個方向的角度誤差均小于0.05°,但基于SVD的最小二乘形式解進(jìn)一步滿足正交約束條件,因此其結(jié)果更可取。
將上面的旋轉(zhuǎn)矩陣結(jié)果輸入經(jīng)緯儀控制系統(tǒng)中,激活其GPS數(shù)據(jù)引導(dǎo)跟蹤功能。結(jié)果表明,光電經(jīng)緯儀可根據(jù)飛機(jī)的實(shí)時GPS遙測數(shù)據(jù)進(jìn)行自動跟蹤,這進(jìn)一步驗(yàn)證了場地標(biāo)定法的有效性。
5 結(jié)束語
針對光電經(jīng)緯儀傳統(tǒng)坐標(biāo)系統(tǒng)一方法的使用限制問題,研究了兩種替代方法。在直接轉(zhuǎn)換法中,設(shè)計(jì)了中間坐標(biāo)系以完成WGS-84坐標(biāo)系和經(jīng)緯儀坐標(biāo)系的轉(zhuǎn)換,并給出了公式推導(dǎo)過程;在場地標(biāo)定法中,給出場地標(biāo)志點(diǎn)測量方法和選取原則,并針對超定方程組求解進(jìn)行了算法分析,給出了基于SVD的最小二乘形式下最優(yōu)解的算法。最終,使用光電經(jīng)緯儀的GPS引導(dǎo)功能實(shí)現(xiàn)了對飛機(jī)超視距跟蹤,成功驗(yàn)證了兩種坐標(biāo)系統(tǒng)一方法的有效性。尤其是場地標(biāo)定法,以其不依賴調(diào)平精度、低成本和快速實(shí)施的特點(diǎn),可以廣泛應(yīng)用在需要靈活部站、快速實(shí)現(xiàn)坐標(biāo)系統(tǒng)一的場景中,具有普適性。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
