基于運(yùn)動(dòng)想象的腦電小車控制系統(tǒng)設(shè)計(jì)
2022-01-19 11:48:20陳汝佳周晉文于粵雯曹進(jìn)煒
物聯(lián)網(wǎng)技術(shù) 2022年1期
張 江,陳汝佳,周晉文,田 雨,于粵雯,曹進(jìn)煒,熊 慧
(天津工業(yè)大學(xué) 控制科學(xué)與工程學(xué)院,天津 300387)
0 引 言
腦機(jī)接口(Brain Computer Interface, BCI),指在人或動(dòng)物大腦與外部設(shè)備之間創(chuàng)建的直接連接,實(shí)現(xiàn)腦與設(shè)備的信息交換。BCI技術(shù)起始于20世紀(jì)70年代,是一種囊括神經(jīng)生物科學(xué)、信號(hào)采集和檢測、信號(hào)處理、模式識(shí)別、通信技術(shù)等多學(xué)科在內(nèi)的新興技術(shù)。同時(shí),BCI技術(shù)具備重大的現(xiàn)實(shí)意義。1999年開展的第一屆腦-機(jī)接口國際會(huì)議,明確了BCI技術(shù)的基本目標(biāo)是使BCI成為全世界嚴(yán)重殘疾人的可行、實(shí)用并且購買得起的替代通信方式。隨著科學(xué)技術(shù)的高速發(fā)展和現(xiàn)代產(chǎn)業(yè)的新型革命,BCI技術(shù)已經(jīng)逐漸成為國內(nèi)外研究的熱點(diǎn),被廣泛應(yīng)用在醫(yī)學(xué)研究和工程應(yīng)用等領(lǐng)域。
BCI技術(shù)涉及腦電信號(hào)(Electroencephalogram, EEG)的采集處理。由于腦電信號(hào)具有非平穩(wěn)、高噪聲、高隨機(jī)這三大特點(diǎn),使得腦電信號(hào)的特征提取成為了亟待解決的問題。針對(duì)腦電信號(hào)的特征提取,共空間模式算法(Common Spatial Pattern, CSP)得到了較為廣泛的應(yīng)用。CSP是一種兩分類任務(wù)下的空域?yàn)V波特征算法,通過尋找最優(yōu)空間投影使得目標(biāo)信號(hào)功率達(dá)到最大,因此它能實(shí)現(xiàn)任務(wù)相關(guān)信號(hào)成分提取,并去除與期望不相關(guān)的成分和噪聲。
對(duì)于準(zhǔn)確分類樣本而言,機(jī)器學(xué)習(xí)領(lǐng)域的支持向量機(jī)(Support Vector Machine, SVM)方法具有一定應(yīng)用價(jià)值。SVM是一種二元分類的廣義線性分類器,通過對(duì)學(xué)習(xí)樣本求解最大邊距超平面(Maximum-margin hyperplane),實(shí)現(xiàn)對(duì)多特征數(shù)據(jù)的二元分類處理。
當(dāng)前市面上的相關(guān)系統(tǒng)能夠?qū)崿F(xiàn)腦電信號(hào)的初步采集,但是在腦電信號(hào)的實(shí)時(shí)處理和直觀顯示方面的效果都有待改進(jìn)。這類系統(tǒng)專業(yè)性強(qiáng)、使用較為復(fù)雜,只適合從事腦電領(lǐng)域的研究者使用,不適合廣泛地普及。因而,開發(fā)一套直觀易操作的腦電采集和判別系統(tǒng)可以有效彌補(bǔ)這一不足。在該前提下,本設(shè)計(jì)利用CSP進(jìn)行特征提取和SVM分類,同時(shí)結(jié)合嵌入式技術(shù)設(shè)計(jì)了一套腦電小車控制系統(tǒng)。該系統(tǒng)可以實(shí)現(xiàn)在現(xiàn)實(shí)環(huán)境下的有效應(yīng)用,具有較大的科研價(jià)值和市場價(jià)值。
1 系統(tǒng)整體設(shè)計(jì)
本系統(tǒng)主要分為兩大模塊:①在軟件算法方面,應(yīng)用PyQt設(shè)計(jì)上位機(jī),實(shí)現(xiàn)腦電信號(hào)的接收,同時(shí)內(nèi)部調(diào)用Python程序進(jìn)行CSP特征提取和SVM分類,并設(shè)計(jì)一套基于PID的控制算法對(duì)小車進(jìn)行精準(zhǔn)控制。最終實(shí)現(xiàn)四元任務(wù)分類,對(duì)處理結(jié)果及腦電信號(hào)進(jìn)行上位機(jī)數(shù)據(jù)可視。②在硬件層面上,以Arduino單片機(jī)為核心,設(shè)計(jì)外圍TB6612驅(qū)動(dòng)電路控制小車,通過HC-05藍(lán)牙模塊進(jìn)行通信功能。整體上實(shí)現(xiàn)對(duì)四種運(yùn)動(dòng)想象狀態(tài)下的腦電信號(hào)進(jìn)行精準(zhǔn)分類并轉(zhuǎn)化為命令控制小車。系統(tǒng)的主要結(jié)構(gòu)如圖1所示。
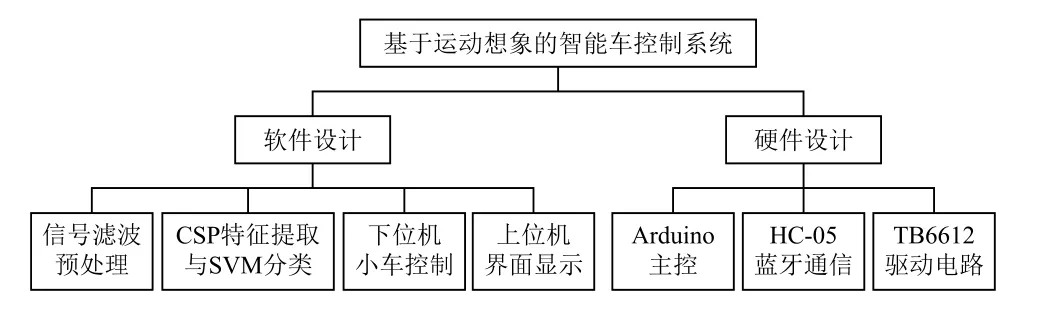
圖1 系統(tǒng)整體設(shè)計(jì)框圖
2 系統(tǒng)算法設(shè)計(jì)
2.1 FIR帶通濾波
人體在進(jìn)行運(yùn)動(dòng)想象時(shí),大腦對(duì)側(cè)的運(yùn)動(dòng)感知皮層被激活,該區(qū)域中的代謝及血流量均增加,神經(jīng)元活動(dòng)加強(qiáng),腦電信號(hào)獨(dú)立性增強(qiáng),同步化程度降低,進(jìn)而μ節(jié)律(8~12 Hz)和β節(jié)律(14~35 Hz)能量減少;同時(shí)大腦同側(cè)的運(yùn)動(dòng)感知皮層的神經(jīng)元活動(dòng)被抑制,導(dǎo)致μ節(jié)律和β節(jié)律能量值升高,在本設(shè)計(jì)中基于該規(guī)律對(duì)腦電信號(hào)進(jìn)行動(dòng)態(tài)分析。但是EEG信號(hào)具有易受影響、微弱、頻率低的特點(diǎn),所以在數(shù)據(jù)預(yù)處理階段需要去除偽跡,例如工頻干擾、電磁干擾以及腦電信息中存在的眼電、心電、肌電干擾。這些偽跡具有較高的頻率,本設(shè)計(jì)通過帶通濾波的方法將其去除,同時(shí)保留帶有有效信息的波形。
FIR濾波器即有限長單位沖擊響應(yīng)濾波器。該濾波器能保證任意幅頻特性,并具備嚴(yán)格的線性相頻特性;同時(shí)單位抽樣響應(yīng)是有限長的,因而該濾波器是穩(wěn)定的系統(tǒng)。為了盡量保證濾除干擾信號(hào),本文采用512階帶通濾波器,對(duì)原始腦電信號(hào)()作變換,得到變換后信號(hào)(),即:

在域變換中設(shè)置上下截止頻率,得到能體現(xiàn)運(yùn)動(dòng)想象狀況的腦電數(shù)據(jù),如圖2所示。
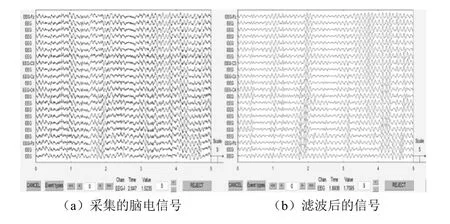
圖2 腦電信號(hào)
2.2 CSP特征提取
經(jīng)帶通濾波處理后的腦電信號(hào)需要經(jīng)過特征提取環(huán)節(jié)提取其所包含的特征。
CSP共空間模式算法屬于一種空域?yàn)V波技術(shù)。其基本原理是利用矩陣的對(duì)角化,找到一組最優(yōu)空間濾波器進(jìn)行投影,使得兩類信號(hào)的方差差異最大化,得到具有較高區(qū)分度的特征向量。該算法對(duì)運(yùn)動(dòng)想象類的腦電信號(hào)處理效果較好,常用于二分類多維數(shù)據(jù)的特征提取。
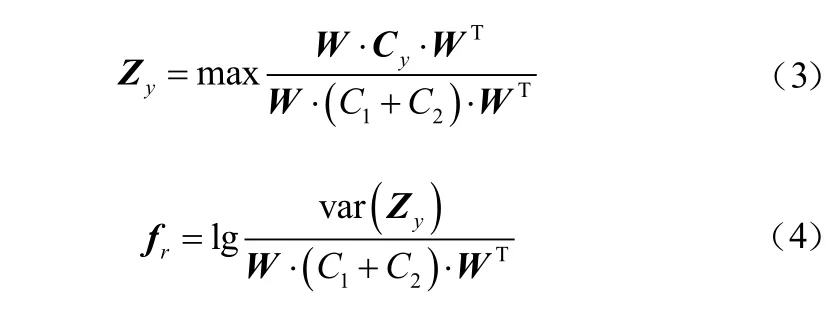
CSP算法主要有求解協(xié)方差矩陣、構(gòu)造空間濾波器和特征提取三個(gè)部分。在訓(xùn)練集的種分類數(shù)據(jù)中取X標(biāo)簽數(shù)據(jù)的第個(gè)矩陣單位,計(jì)算其數(shù)據(jù)矩陣的均值空間協(xié)方差矩陣C,即:

根據(jù)奇異值分解定理進(jìn)行特征分解,對(duì)特征向量矩陣進(jìn)行白化,白化后將白化矩陣作用于各分類的共同空間模式并進(jìn)行主分量分解得到特征矩陣。通過特征矩陣和白化矩陣得到用于分類的投影矩陣。將空間矩陣C通過濾波器濾波得到各分類的特征矩陣Z。以測試集為樣本,計(jì)算投影后信號(hào)的方差作為特征,得到最后的特征向量f,即:
傳統(tǒng)CSP算法適用于二元任務(wù)分類,能識(shí)別兩種不同的運(yùn)動(dòng)想象,并進(jìn)行兩種相應(yīng)的控制。本文針對(duì)傳統(tǒng)CSP算法進(jìn)行了改進(jìn),采用“一對(duì)一”的方法,使其能進(jìn)行多元任務(wù)分類問題的處理。
采用“一對(duì)一”法提取每兩個(gè)分類的投影矩陣。每個(gè)類別內(nèi)的特征相對(duì)統(tǒng)一,便于找到使兩類差別最大的投影方向。對(duì)于本系統(tǒng)中的四分類問題,采用“一對(duì)一”的分類方法,把腦電信號(hào)進(jìn)行兩兩組合,計(jì)算其投影矩陣并提取特征,由此得到6個(gè)濾波器。分類思路如圖3所示。
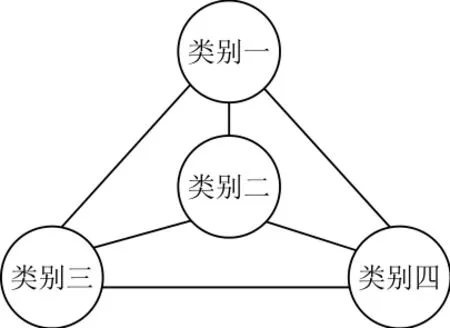
圖3 “一對(duì)一”法分類思路
2.3 SVM分類器設(shè)計(jì)
提取各類的特征后,需要確定運(yùn)動(dòng)想象結(jié)果的類別。
本系統(tǒng)采用了支持向量機(jī)(Support Vector Machine,SVM)的方法。SVM是一種二元分類器,目標(biāo)是尋找一個(gè)超平面,并使用兩類數(shù)據(jù)離超平面越遠(yuǎn)即越優(yōu)的結(jié)論,達(dá)到分類效果。二分類的SVM主要分為尋找最優(yōu)分類線、利用拉格朗日乘子解決最優(yōu)、構(gòu)建最優(yōu)決策函數(shù)三個(gè)部分。整體思路為通過拉格朗日乘子法求解出在以為維度變量的最優(yōu)超平面中的系數(shù)矩陣和常量矩陣,即可確定出點(diǎn)到超平面的距離最小值,即:
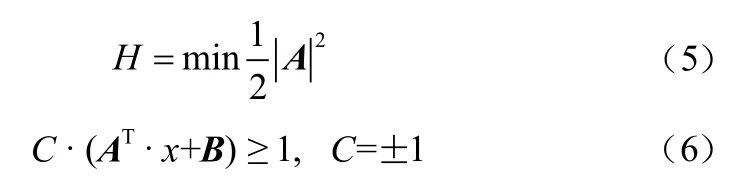
對(duì)于本系統(tǒng)中的四分類問題,依次采用“一對(duì)一”的方法,將四分類問題轉(zhuǎn)化為六個(gè)分類任務(wù),避免了數(shù)據(jù)不可分和數(shù)據(jù)集偏斜問題。在六個(gè)分類器產(chǎn)生最終輸出結(jié)果時(shí),采用了判斷決策函數(shù)值的方法。該方法的主要思想是利用SVM分類器在分類過程中返回的判斷決策函數(shù)值,該值的絕對(duì)值大小反映了SVM的判斷能力。因此,將六組分類器中判斷決策函數(shù)值絕對(duì)值最大的分類器的判斷類別作為最終的輸出,如圖4所示。
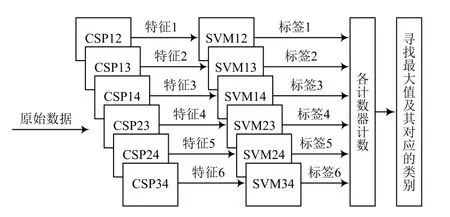
圖4 SVM分類流程
2.4 上位機(jī)顯示
本設(shè)計(jì)中上位機(jī)采用PyQt編程。除將小車運(yùn)動(dòng)的控制代碼燒錄到Arduino單片機(jī)外,其余軟件設(shè)計(jì)均采用Python語言實(shí)現(xiàn)。在此基礎(chǔ)上采用PyQt編寫的上位機(jī)可以很好地嵌入到整體的算法設(shè)計(jì),保證系統(tǒng)有較高的集成度。上位機(jī)顯示界面直觀實(shí)時(shí)顯示當(dāng)前想象的原始腦電信號(hào);對(duì)運(yùn)動(dòng)傾向經(jīng)過數(shù)據(jù)預(yù)處理、特征提取和分類,同時(shí)配有藍(lán)牙串口的連接狀態(tài),確保小車和上位機(jī)實(shí)時(shí)通信;通過按擊啟動(dòng)停止按鈕即可進(jìn)行整套系統(tǒng)的自動(dòng)運(yùn)行和停止實(shí)驗(yàn)。上位機(jī)界面如圖5所示。
圖5 上位機(jī)界面
2.5 小車控制算法設(shè)計(jì)
本系統(tǒng)使用的小車為雙電機(jī)履帶小車,如圖6所示。
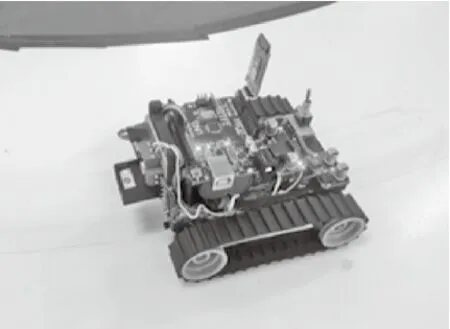
圖6 履帶小車實(shí)物圖
小車依靠履帶傳動(dòng),控制思路采用輸出-反饋-輸出的閉環(huán)控制。主控在藍(lán)牙模塊與上位機(jī)成功通信后將分類結(jié)果讀出,進(jìn)行四種運(yùn)動(dòng)狀態(tài)的相應(yīng)指令輸出;對(duì)應(yīng)四種運(yùn)動(dòng)模式設(shè)置四種電機(jī)初始PWM,在控制指令發(fā)出后通過測速讀回速度值,作為輸入進(jìn)入調(diào)試完畢的PID模型,得到二次輸出,實(shí)現(xiàn)四種運(yùn)動(dòng)狀態(tài)的精準(zhǔn)可控。
3 系統(tǒng)硬件設(shè)計(jì)
3.1 NeuSen-W腦電帽
本設(shè)計(jì)采用博睿康科技的NeuSen-W可穿戴無線數(shù)字腦電采集設(shè)備。該設(shè)備具有8-64通道的無線同步數(shù)據(jù)采集,最大采樣頻率為16 kHz;采集信號(hào)通過無線網(wǎng)絡(luò)下的TCP/IP協(xié)議傳輸給接收設(shè)備,速度可達(dá)到5 GHz WiFi數(shù)據(jù)傳輸,數(shù)據(jù)同步速率小于1 ms。
圖7為電帽信息通信中轉(zhuǎn)控制器和腦電極分布圖。

圖7 電帽信息通信中轉(zhuǎn)控制器(左)和腦電極分布圖(右)
3.2 Arduino主控單片機(jī)
本系統(tǒng)的微控制器選用核心處理器為AVR的ATMRGA328作為主控芯片,閃存容量為32 KB,燒錄Arduino固件之后將其作為指令中轉(zhuǎn)主控。該芯片具有出色的低功耗性能和較快的響應(yīng)速度,可以實(shí)現(xiàn)小車長時(shí)間地持續(xù)運(yùn)動(dòng)。
3.3 藍(lán)牙模塊
本系統(tǒng)的通信模塊采用HC-05高速藍(lán)牙模塊。該模塊集成度高、穩(wěn)定性好,最高可達(dá)到1 382 400波特率通信,通信距離較長且信號(hào)穩(wěn)定,支持主從一體模式,可實(shí)現(xiàn)準(zhǔn)確接受上位機(jī)發(fā)送的腦電波分類指令,通過串口方式向中轉(zhuǎn)主控?cái)?shù)據(jù)緩存區(qū)寫入數(shù)據(jù),實(shí)現(xiàn)上位機(jī)和主控之間的數(shù)據(jù)通信。
3.4 TB6612FNG模塊
TB6612FNG是TOSHIBA公司出品的一種輸出晶體管為低導(dǎo)通電阻的MOS結(jié)構(gòu)的直流電機(jī)驅(qū)動(dòng)芯片,具有大電流MOSFET-H橋結(jié)構(gòu),雙通道電路輸出,每通道輸出最高1.2 A的連續(xù)驅(qū)動(dòng)電流,可同時(shí)驅(qū)動(dòng)2個(gè)電機(jī)。兩個(gè)I/O輸入信號(hào)就能實(shí)現(xiàn)四種運(yùn)動(dòng)狀態(tài)的選擇,PWM信號(hào)支持頻率寬且電路集成度高、外圍電路少,使用方便。
在測速上本系統(tǒng)選取了500線的光電碼盤測速。該測速模塊轉(zhuǎn)動(dòng)一周產(chǎn)生A、B兩相500個(gè)脈沖,相位相差90°,主控芯片根據(jù)兩個(gè)脈沖信號(hào)相位差和單位時(shí)間脈沖數(shù)確定電極轉(zhuǎn)速和小車運(yùn)動(dòng)方向,通過主控中的速度PID算法達(dá)到運(yùn)動(dòng)閉環(huán),實(shí)現(xiàn)對(duì)小車的精確控制。整體電路設(shè)計(jì)原理如圖8所示。
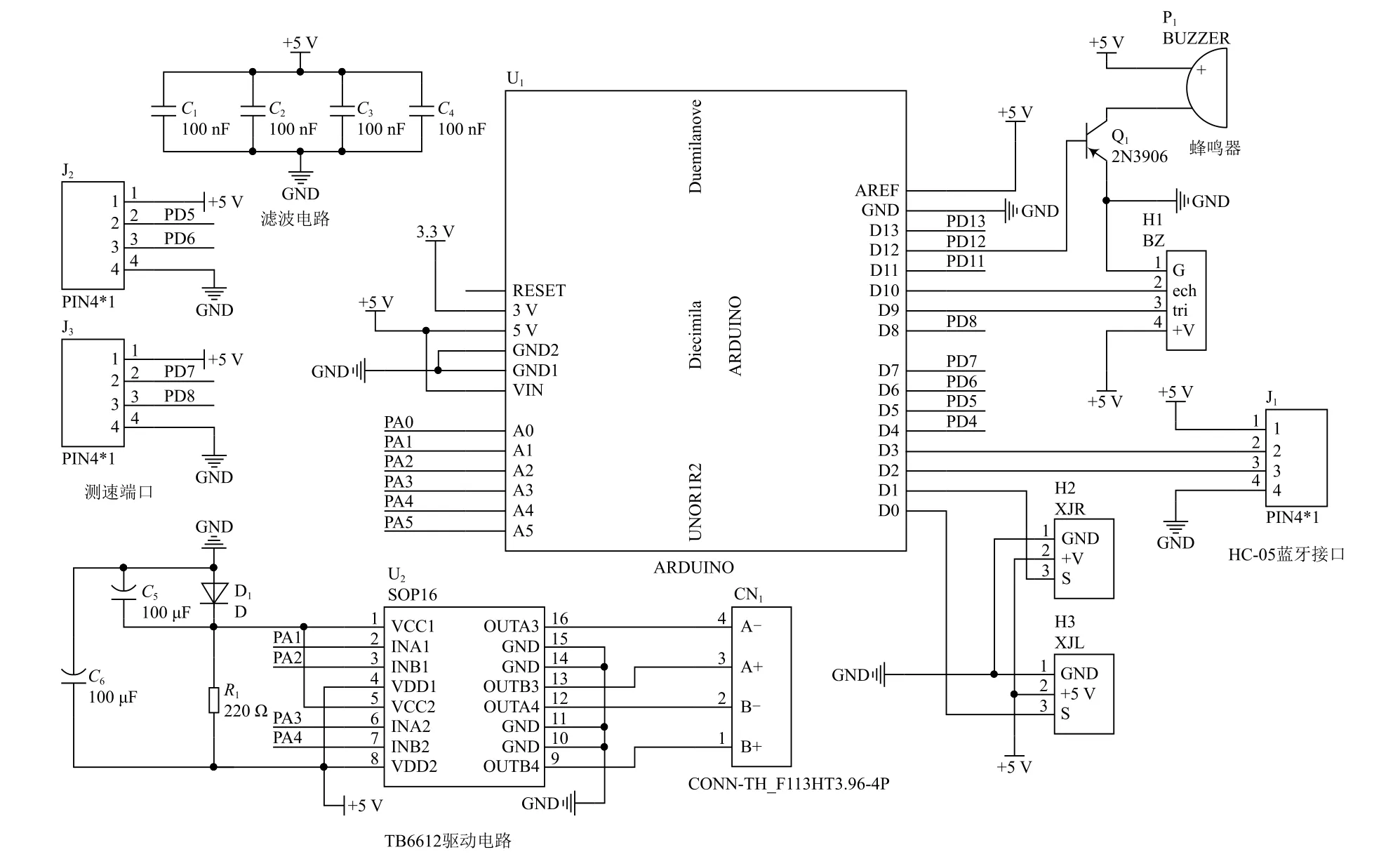
圖8 整體電路設(shè)計(jì)原理圖
4 實(shí)驗(yàn)與驗(yàn)證
實(shí)驗(yàn)設(shè)備信息采用NeuSen-W進(jìn)行采集,采樣率為500 Hz。實(shí)驗(yàn)在全封閉的房間中進(jìn)行,以便被試者集中注意力進(jìn)行運(yùn)動(dòng)想象任務(wù)。手機(jī)、電腦等能夠產(chǎn)生電磁波的設(shè)備均處于關(guān)閉狀態(tài)。實(shí)驗(yàn)室內(nèi)只有被試者和實(shí)驗(yàn)人員,盡量減少外界噪聲。實(shí)驗(yàn)中被試者直坐在椅子上,面前只有一臺(tái)電腦以及桌子,被試者可以將雙手放在桌子上,做與提醒界面相同的姿勢,更有利于被試者進(jìn)行想象動(dòng)作。共進(jìn)行100次實(shí)驗(yàn),測試時(shí)間是在晚上七點(diǎn),被試者根據(jù)屏幕隨機(jī)出現(xiàn)動(dòng)作進(jìn)行對(duì)應(yīng)的想象,每次想象持續(xù)4 s,每個(gè)動(dòng)作間隔3 s,實(shí)驗(yàn)場景如圖9所示。

圖9 運(yùn)動(dòng)想象實(shí)驗(yàn)現(xiàn)場圖
利用訓(xùn)練好的模型對(duì)每次產(chǎn)生的信號(hào)片段進(jìn)行分類,分類結(jié)果通過藍(lán)牙傳至下位機(jī)小車進(jìn)行結(jié)果表達(dá)。
實(shí)驗(yàn)完成后,統(tǒng)計(jì)小車內(nèi)部的運(yùn)動(dòng)狀態(tài)計(jì)數(shù),與視頻隨機(jī)出現(xiàn)的動(dòng)作順序進(jìn)行比對(duì),結(jié)果如圖10所示。
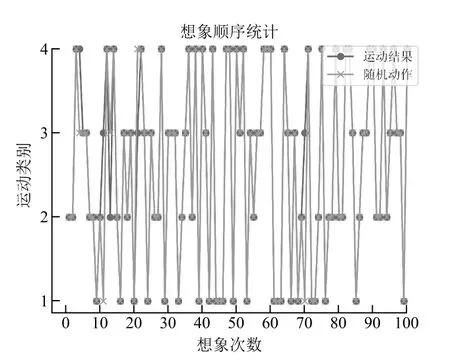
圖10 小車運(yùn)動(dòng)和動(dòng)作順序?qū)Ρ?/p>
實(shí)驗(yàn)結(jié)果表明,系統(tǒng)采集的數(shù)據(jù)和最終分類控制的結(jié)果都較為準(zhǔn)確;同時(shí)在實(shí)驗(yàn)過程中本系統(tǒng)工作穩(wěn)定,能夠達(dá)到預(yù)期目標(biāo)。
5 結(jié) 語
本設(shè)計(jì)實(shí)現(xiàn)了對(duì)人體運(yùn)動(dòng)想象產(chǎn)生的腦電信號(hào)的采集,并根據(jù)相應(yīng)的想象腦電進(jìn)行特征提取和分類,最終得到一套基于運(yùn)動(dòng)想象的腦控智能車系統(tǒng),實(shí)現(xiàn)了通過運(yùn)動(dòng)想象對(duì)小車進(jìn)行實(shí)時(shí)控制。相比傳統(tǒng)運(yùn)動(dòng)想象系統(tǒng),該系統(tǒng)準(zhǔn)確度更高、成本更低,同時(shí)在實(shí)時(shí)性上也有一定提升,在腦-機(jī)接口的其他領(lǐng)域具有推廣和應(yīng)用價(jià)值。
猜你喜歡
科普童話·學(xué)霸日記(2021年4期)2021-09-05 04:28:51
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
小學(xué)生作文(低年級(jí)適用)(2019年12期)2020-01-18 07:50:36
電子制作(2019年15期)2019-08-27 01:12:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中國化妝品(2018年6期)2018-07-09 03:12:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
中國生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45