基于物聯網的無人船水質采樣系統
2022-01-19 11:48:28張澤宇劉書磊郭李雯
物聯網技術 2022年1期
關鍵詞:水質
張澤宇,魏 義,劉書磊,郭李雯,狄 威
(河海大學,江蘇 常州 213022)
0 引 言
為了實現可持續發展的國家戰略規劃,定期對河流湖泊等水域進行水質監測和采樣有助于保護我國水資源。傳統的水質監測和采樣需要消耗大量時間和人力,效率也比較低下。相比之下,近幾年興起的無人船技術能夠節省很多資源并提高效率。基于物聯網的無人船系統采用現代無線通信技術,可以實現水域的全面覆蓋,通過遠程終端控制實現大面積水域的監測。
當前已經有許多無人船可以實現遠程監測水域環境,通過安裝在船體底部的傳感器采集水體的相關指標信息,將數據傳送給上位機,遠程傳輸數據給地面監測站。然而,通過傳感器采集到的水樣數據種類少,只能根據傳感器的種類識別水樣的部分參數。想要詳細地檢測水域中水體的具體狀況,必須對水體進行采樣。為此,本文提出了一種基于物聯網的無人船水質采樣系統,可以實現多地點的水體樣本采樣。
1 無人船驅動控制系統設計
基于物聯網的無人船水質采樣系統需要無人船在指定的水域里航行,地面的操控人員需要知道無人船的實時位置,下達航行指令,并且能指揮無人船返航。為此,本文設計的無人船系統以Pixhawk4為無人船的驅動控制硬件,以Mission Planner作為地面控制站,結合GNSS(全球導航定位系統)和無線數傳技術,進行無人船的導航定位。為防止地面基站無線數傳控制失效,采用RadioLink遙控器控制為備用控制方案。無人船整體控制系統結構如圖1所示。
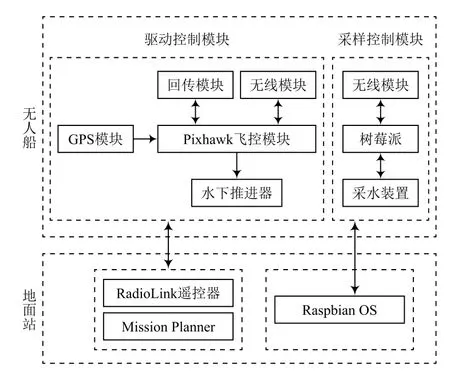
圖1 無人船控制系統
1.1 Pixhawk4飛行控制板
Pixhawk是一款高性能、低成本的開源飛控系統,被不同行業的開發者用于無人機、無人車和無人船控制。Pixhawk開發板可以根據需要外接電源模塊、GPS模塊、無線網絡模塊等。由于Pixhawk有相關社區技術支持,加上科研人員不斷進行開發優化,可以直接使用開源程序進行使用。本文中使用的是最新款Pixhawk4飛控板。
1.2 Mission Planner地面站
地面站通常是在岸基計算機上運行的軟件應用程序,通過無線遙測與無人艇進行通信。它顯示無人艇位姿和位置的實時數據,可以作為“虛擬駕駛艙”,通過基站下達航行指令,顯示許多與真實駕駛無人艇時相同的儀表數據。Mission Planner是Windows系統下APM/PIX標配地面站,經過多年的發展和優化,已經很穩定和成熟。Mission Planner操作界面如圖2所示。
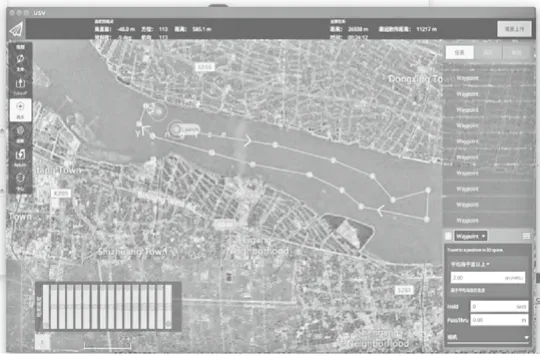
圖2 Mission Planner操作界面
1.3 RadioLink遙控器
RadioLink遙控器是樂迪電子推出的系列遙控器,可用于直升機、多旋翼無人機、無人車、無人船的遙控控制。本文無人船使用的是12通道遙控器AT10II,自帶的USB接口,可用于后續固件升級。
1.4 雙船體結構
為保證在水面上的穩定性,用于水質采樣的無人船采用雙體船結構,整體模型如圖3所示。連接船體的兩個支撐架分別用于放置硬件和安裝采樣裝置。船體尾部各自安裝了水下推進器,12 V鋰電池電源供電。控制無人船驅動包括自動駕駛和手動遙控兩種模式。
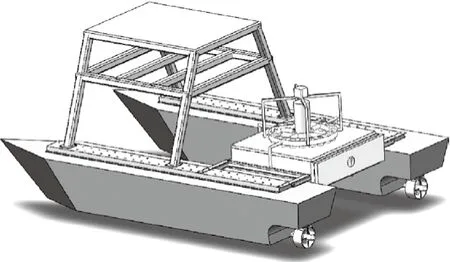
圖3 無人船模型
2 無人船水質采樣系統設計
無人船對水域的保護包括水環境監測和水體采樣。水環境監測利用安裝在無人船底部的檢測裝置采集水體的參數,包括溶氧量、濁度、含氮量等等;水體采樣則是用安裝在船體上的采樣裝置來完成,并裝入收集器皿內。現有的一些采樣裝置采集的水體樣本容積大,大量采水容易引起船身的傾斜,影響航行。此外,由于采樣裝置簡單,采集到的水體樣本數量少,想要獲得多處水樣需要進行多次航行,會造成不必要的時間和精力的浪費。
2.1 采樣系統結構
針對上述情況,設計一種可以進行多次采樣的無人船采樣系統,如圖4所示。采水裝置有多個漏斗口,步進電機控制抽水泵轉動,抽水泵的出水口正好對接漏斗口,從而只要控制步進電機轉動角度便能夠實現多次水體樣本采樣。通過樹莓派控制步進電機轉動和抽水泵的啟停,輔助以電源模塊、穩壓模塊、步進電機驅動器。樹莓派、工控機之間通過無線基站建立局域網,擴大控制距離。漏斗口下方用橡膠軟管連接收集皿,并標記序號。
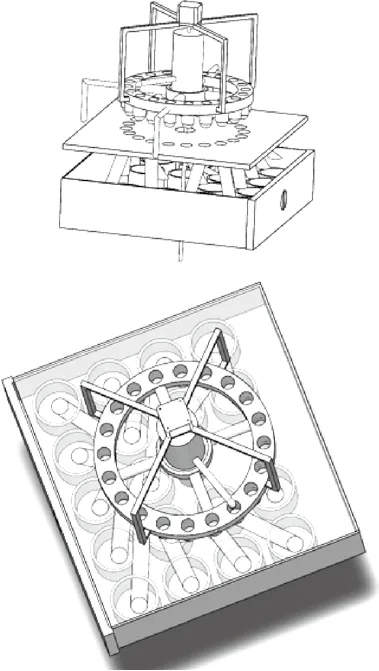
圖4 采樣裝置
2.2 采樣程序
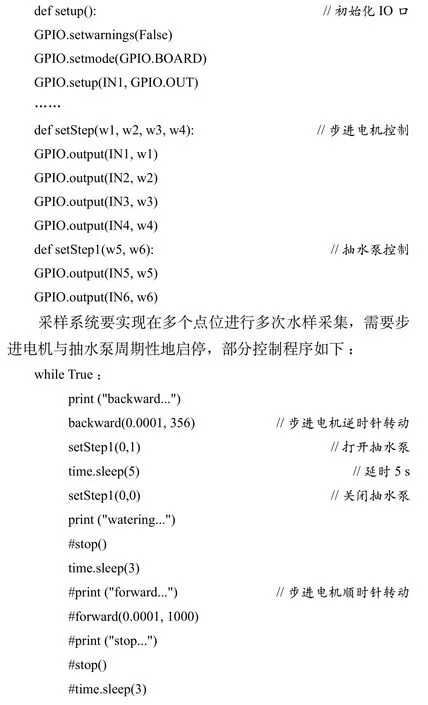
采樣控制由樹莓派發送信號實現,步進電機和抽水泵開關信號分別連接對應的I/O口,并通過程序初始化,相應程序如下:
3 結 語
無人船水質采樣系統用于河流湖泊水質的采樣,采集到的水體樣本可供研究人員研究分析。本文設計了一種基于物聯網技術的無人船水質采樣系統,可以實現遠程控制無人船在若干個不同點位進行水質采樣和收集,提高水域水質采樣的效率。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
小星星·閱讀100分(低年級)(2022年6期)2022-08-22 02:33:40
供水技術(2021年3期)2021-08-13 09:08:34
建材發展導向(2019年10期)2019-08-24 06:25:02
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
電子制作(2018年14期)2018-08-21 01:38:16
水利規劃與設計(2018年1期)2018-01-31 01:53:53
水利規劃與設計(2016年7期)2016-02-28 15:06:27
世界文學評論(2014年2期)2014-04-12 06:23:43