拖拉機室內臺架試驗技術現狀與展望*
2022-01-19 00:19:18陶倩文閆祥海仝一錕閆宇翔徐立友
中國農機化學報 2021年12期
關鍵詞:評價
陶倩文,閆祥海,仝一錕,閆宇翔,徐立友
(河南科技大學車輛與交通工程學院,河南省汽車節能與新能源重點實驗室,河南洛陽,471000)
0 引言
農業機械化是農業現代化的重要內容和標志之一,在《中國制造2025》實施綱要中,智能農機裝備被列為重點發展的十大領域之一[1]。拖拉機作為主要農用機械,配合農機具可完成犁耕、旋耕、植保、打捆等多種形式的農業作業[2]。由于拖拉機作業情況復雜、設計技術領域廣泛、試驗驗證困難,拖拉機工業的發展就尤其重視試驗工作。拖拉機試驗主要有計算機仿真試驗、室內臺架試驗、室外實車試驗3種方式,室內臺架試驗是拖拉機產品開發中從計算機仿真試驗到室外實車試驗的關鍵一環,是拖拉機產品研發過程中廣泛采用的一種試驗手段[3]。與計算機仿真試驗相比,室內臺架試驗具有精度高的優點,計算機仿真試驗往往只適用于研究初期;與室外實車試驗相比,室內臺架試驗具有不受外界自然環境限制的優點,且拖拉機零部件的布置也不受整車總布置限制。拖拉機室內臺架試驗關鍵技術主要有動力總成控制技術、負載模擬技術、試驗數據處理技術和試驗結果評價技術。本文對國內外拖拉機室內臺架試驗技術進行分析總結,對今后拖拉機室內臺架試驗技術發展趨勢進行展望,提出拖拉機室內臺架試驗技術的未來發展方向。
1 動力總成控制技術
根據能源類型的不同,拖拉機試驗臺架的動力設備分為電池—電機和發動機。動力總成控制技術主要是指對發動機、電機輸出動力的控制。根據試驗對象的結構特點,各動力總成之間的連接關系可以是串聯、并聯或混聯[4]。動力總成控制技術的核心是動力控制系統,由軟件和硬件兩部分構成,主要包括發動機控制、電池—電機控制,而控制系統研發的重點集中在控制軟件開發和控制策略研究上[5-11]。動力總成控制算法的目標是實現需求轉矩在發動機和驅動電機之間的合理分配,以獲得最優的經濟性、動力性和排放水平等綜合性能。動力總成控制算法優化是拖拉機的關鍵技術,智能優化算法能實現全局、并行高效優化,具有魯棒性和通用性強等優點,廣泛用于計算機科學、組合優化、工程優化設計等領域,應用于拖拉機動力總成控制的常用算法有GA、PSO、SA、蟻群算法(Ant Colony Algorithm,ACO)和人工神經網絡(Artificial neural networks,ANN)。控制策略的研究多集中于動力總成參數匹配及能量分配上[12-15],近年來,已有不少學者對此展開研究,牛禮民等[16]提出了一種多能源動力總成的智能體控制方法,利用單智能體的智能行為和多智能體的協作能力解決了拖拉機對復雜路況的自適應問題;夏長高等提出了一種以超級電容作為輔助電源的新型純電動拖拉機結構及能量管理研究方案,有效提升了電動拖拉機的加速性能、牽引力和一次充電作業時間;鄭永霞等[17]針對裝備CVT的混合動力汽車,提出了一種以混合動力系統效率最高為優化目標,以車速、加速踏板行程和電池SOC為狀態變量,以電機轉矩和CVT速比為控制變量的中度混合動力汽車能量優化策略。
1.1 發動機控制技術
拖拉機發動機已進入電子時代,發動機控制技術得到了迅猛發展,圍繞點火控制系統、怠速控制系統、空燃比控制系統、電子節氣門控制系統、燃油噴射控制系統、渦輪增壓控制系統、爆震檢測控制系統及汽油先進燃燒模式控制等方面的技術不斷涌現。隨著混合動力拖拉機和電動拖拉機的發展,對發動機和電動機功率匹配協調控制也逐步成為研究熱點,楊學青[18]提出了一種采用緩沖器轉交差的反饋方法來對發動機—電機集成系統進行反饋控制,提高了電機和發動機之間的動力耦合裝置—緩沖器的可靠性。拖拉機作業越來越智能化、自動化、節能化;王曉光等基于Android技術,結合嵌入式控制系統,設計了一套拖拉機自動化作業發動機智能啟停遠程控制系統;Rossetti等[19]對裝有連續液力機械傳動的發動機的管理進行了研究,提出一種將發動機的最低油耗控制策略擴展到發動機—變速器組即整個動力系統的方法。
1.2 電機控制技術
電機是指依據電磁感應定律實現電能轉換或傳遞的一種電磁裝置,隨著拖拉機車輛的智能化[20-21],電機控制技術呈現出多元化增長,文獻[22-23]以電機為執行元件的定位控制技術在農機自動導航轉向系統中廣泛應用。目前電動拖拉機使用的電機系統主要有異步電機驅動系統和永磁同步電機驅動系統兩種,王雪迪等[24]以試驗證明異步發電技術可以實現柴油機和電動機之間能量快速傳遞的功能;李宇翔等[25]通過電流滯環控制和模糊PI自適應控制實現對永磁同步電機控制系統電流和速度的控制。對于電機的控制,常用的是矢量控制和直接轉矩控制,模糊控制和魯棒控制是兩種常見新型轉矩控制技術,其中矢量控制因其良好的控制特性而應用廣泛。
1.3 電池及能量管理技術
電池為電動拖拉機、混合動力拖拉機提供動力源,電池的熱管理一直是制約其發展的技術瓶頸,主要制約因素是電池的質量和價格,目前正在研發的電動拖拉機用電池類型及其優缺點如表1所示,鉛酸電池原材料便宜、技術成熟,改進后的鉛酸電池是電池市場的有利競爭者,鋰離子電池能量密度大和能量效率高的特性有效解決了純電動拖拉機的續航問題和加速問題,因此電動拖拉機目前主要采用的是鉛酸電池和鋰離子電池。Raugei等[26]提出一種新的磷酸鈷鋰(LCP)配方的鋰離子電池,這種電池的熱穩定性得到提高,從而改善了鋰離子電池的安全性能。電池的能量管理指通過對電池組充放電過程的控制使得電池充放電均衡,使放電滿足不同工況對能量的需求,盡可能地提高電池的使用壽命。與汽車不同,拖拉機除了運輸作業外,主要工況是田間作業,拖拉機的能量管理比汽車更加復雜,因此電動拖拉機對動力電池有特殊要求,要求動力電池具有較大充放電功率的能力和較高的效率;要求在快速充放電過程中和復雜多變工況條件下動力電池要具有相對穩定性。劉孟楠等[27]設計了基于超級電容并聯動力電池組的電動拖拉機能量系統方案,在此基礎從事了基于模式控制的電動拖拉機能管策略研究;李萬敏等[28]提出一種基于超級電容和蓄電池組合電源的混合動力拖拉機動力控制系統,如圖1所示,這種動力控制系統將3種動力源并聯,能夠有效減少拖拉機控制系統運行模式頻繁切換導致蓄電池頻繁瞬時峰值大電流充放電,可以實現混合動力的能量最優分配,進一步提高整機的動力性、燃油經濟性及排放性能。
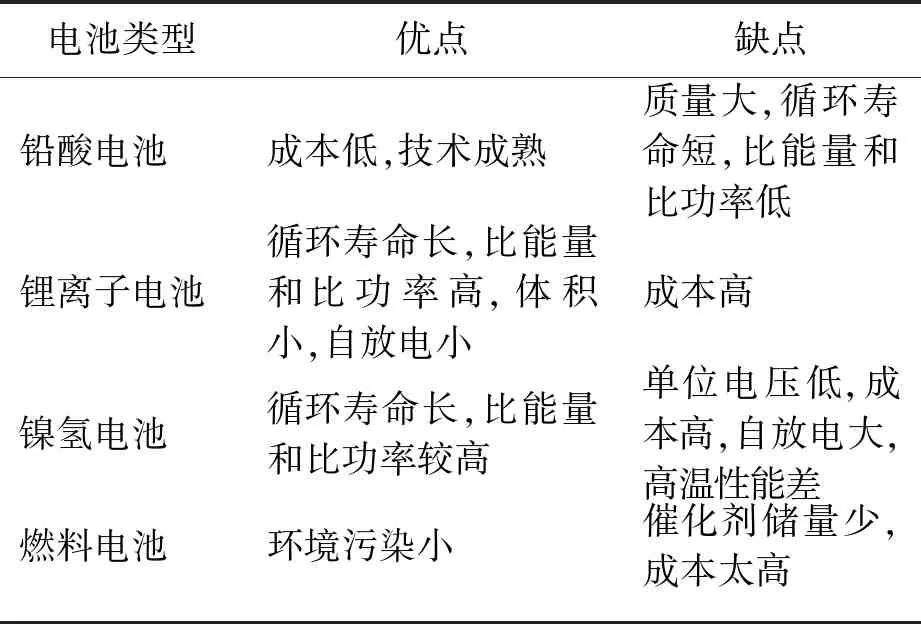
表1 電池類型及優缺點對比Tab.1 Battery types and comparison of advantages and disadvantages
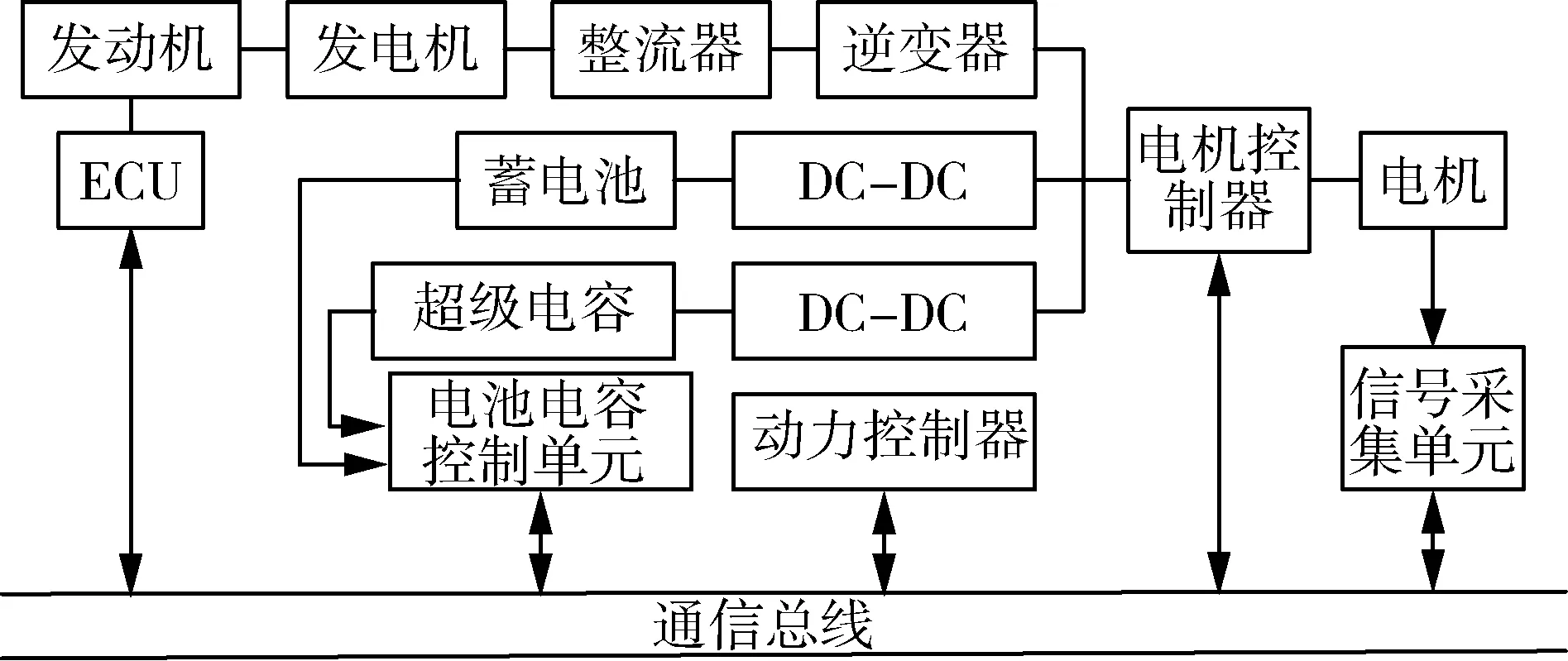
圖1 動力系統總體結構Fig.1 Overall structure of power system
2 負載模擬技術
根據拖拉機的工況不同,負載可分為靜態負載、動態負載,在試驗臺上主要研究負載的實現方法與技術[29]。對拖拉機負載的模擬最開始是利用轉鼓試驗臺[30],如圖2所示,但是由于其安裝精度不高且不能用于履帶式拖拉機,后來逐步轉用電動機作為測功機的方式來模擬負載,如圖3所示。一般情況下,臺架使用測功機來模擬拖拉機的路面行駛負載,使用可調慣量的飛輪組來模擬拖拉機的慣性負載[31],由于飛輪箱加工制造困難且飛輪組也不能實現拖拉機機械慣量的無極模擬,現如今,越來越多的臺架試驗系統采用測功機來同時進行道路阻力及慣性阻力的動態模擬。

圖2 轉鼓試驗臺Fig.2 Drum test bench
測功機用于模擬拖拉機負載時,通常有兩種模式:穩態負載模擬模式和動態負載模擬模式[32]。穩態負載模擬模式是指測功機輸出預定義的恒定扭矩負載,這種模式沒有考慮拖拉機在加減速時的慣性負載,一般用于測試被試件在穩態工況下的輸出特性,比如疲勞壽命試驗[33],這種工況模式遠遠不能達到對其各項工作指標的測試要求。目前國內對負載模擬的研究就主要集中在測功機穩態負載模擬方面,國內交流電力測功機研究和制造的單位很少,以交流電力測功機為核心的動力與傳動裝置的技術研究和測試設備開發能力70%以上的市場都被德國、奧地利等大公司壟斷[34]。動態負載模擬模式是指測功機實時模擬拖拉機在實際路面上行駛時隨時間變化的負載,包括行駛負載及慣性負載,一般用于測試驅動電機或整車的動力性能、燃油經濟性能及與之相關的控制策略,這種模式下,被試件的動態特性及穩態特性均能被測試。因此,拖拉機試驗臺架建設的關鍵技術是臺架具備動態負載模擬能力,其本質是在臺架上進行拖拉機性能測試時,臺架能夠實時動態地還原拖拉機在實際路面行駛時的載荷,只有臺架模擬的載荷與實際路面上拖拉機的行駛載荷在一定精度范圍內相近,臺架試驗才有意義[35]。負載模擬算法精度直接決定了臺架試驗的準確性和可信度,必須保證高精度的負載模擬以適應拖拉機不同的測試需求,在設計負載模擬算法時不僅要考慮控制傳統點對點的通信控制系統,還要考慮控制網絡傳輸時滯的影響。
目前,動態負載模擬技術的實現主要由以下幾種方法。文獻[36]基于前向模型跟蹤的方法設計了測功機動態負載模擬算法,采用測功機閉環跟蹤模型車速的方法實現了測功機動態負載模擬,如圖4所示為動態負載模擬臺架試驗系統結構圖,拖拉機動態模型根據扭矩儀測試的轉矩轉速信號、駕駛員制動信號及車輛的配置參數,實時計算拖拉機的負載,并通過測功機加載到傳動軸,由此實現拖拉機動態負載模擬[37]。文獻[38]提出了速度跟蹤的動態負載模擬方法,該方法針對近似線性負載模擬系統具有較好的效果。文獻[39-40]在對測功機應用反饋閉環和前饋控制的基礎上,對被試驅動系統采用PI估計器對其運行狀態進行估計。這種方法是一種非線性控制方法,能研究系統的非線性動力學特征并給予修正,通常應用于非線性因素嚴重或者需要較高負載模擬準確度的負載模擬系統中。
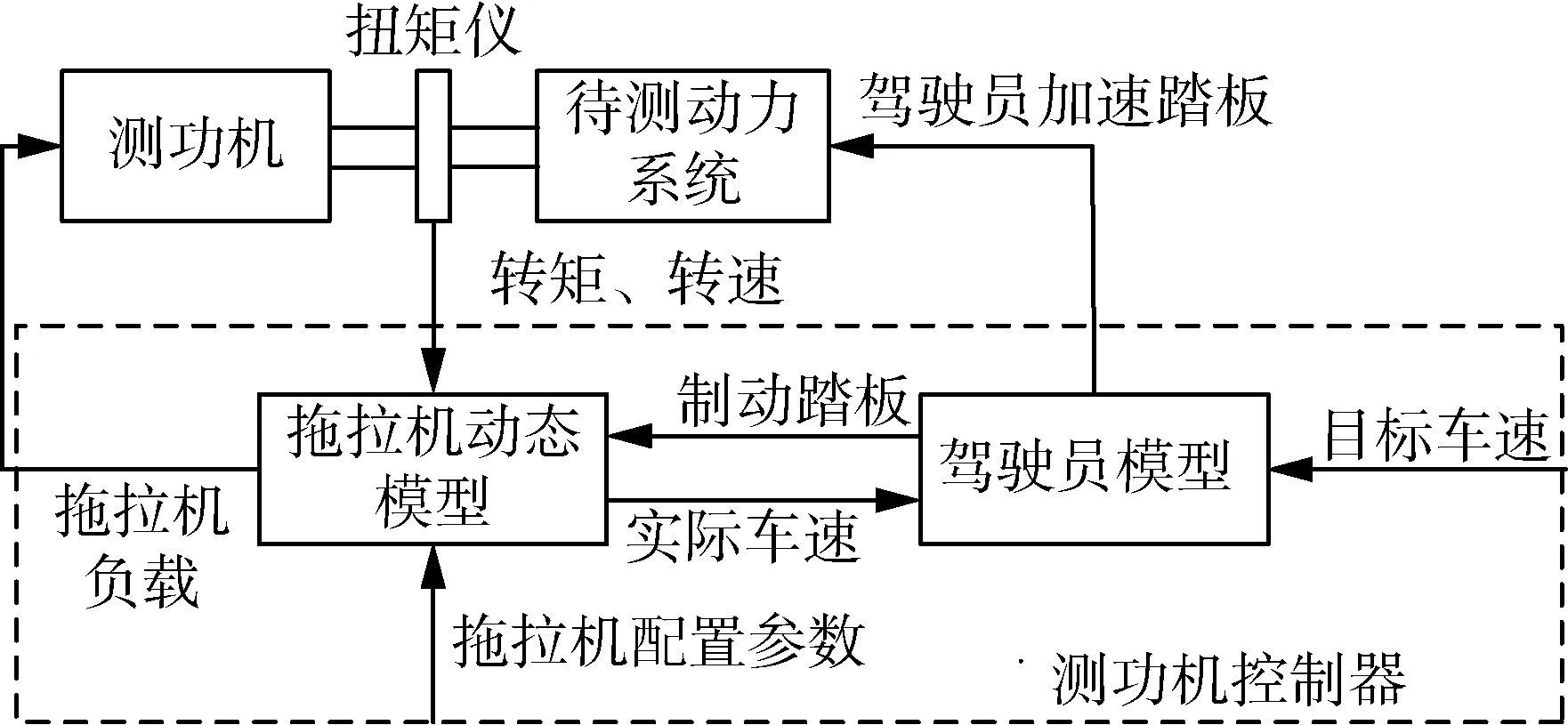
圖4 動態負載模擬臺架試驗系統結構圖Fig.4 Structure diagram of dynamic load simulation bench test system
3 試驗數據處理技術
試驗數據處理技術包括數據的采集、傳輸與分析。拖拉機試驗臺架的數據采集與處理由工業控制計算機實現,通過A/D數據采集卡和脈沖采集卡將試驗現場的工作參數采集到計算機中,同時,通過D/A數模轉換卡將計算機的控制信息送到拖拉機試驗臺架的工作現場,控制相應的執行部件完成預定的動作[41]。
數據采集(DATA Acquisition)就是要將獲取的信息通過傳感器轉換信號,經過調理、采樣、量化、編碼和傳輸等步驟,最后送往計算機的控制系統中進行處理、分析,并最終顯示結果。拖拉機試驗臺架測控數據來源于數據采集模塊,數據采集模塊包括試驗參數相關信息的采集、安全監視信號的采集和計算機雙向數據傳輸,數據采集模塊對拖拉機試驗臺測控精度研究起決定性作用。拖拉機試驗臺數據的采集主要包括土壤、整機、環境3個方面[42]。在農田土壤數據采集時,由于農田環境復雜往往需要采用多傳感器的形式對土壤的水分、濕度及養分進行采集;對拖拉機整機而言需要采用轉速轉矩儀、壓力傳感器、流量傳感器、溫度傳感器、電流電壓傳感器對整機的轉速轉矩、壓力、流量、溫度、電流電壓信號進行采集;受各種植物的影響,拖拉機作業環境比較復雜,現多采用激光雷達(Light detection and ranging,LiDAR)作為環境感知傳感器[43]。如圖5所示為點云采集系統通信與供電通路圖,基于激光雷達的農田環境點云采集系統采用功能模塊化設計,可獲取多角度、多層次的環境點云信息。通過車體位姿采集模塊獲取了車體準確的絕對位置與相對姿態信息;通過數據融合模塊接收并融合環境點云數據與車體位姿數據,進而獲取了位姿補償后的點云數據;設計了穩定的安裝結構和可靠的供電與數據通路,確保農田環境數據與車體位姿信息的有效獲取。
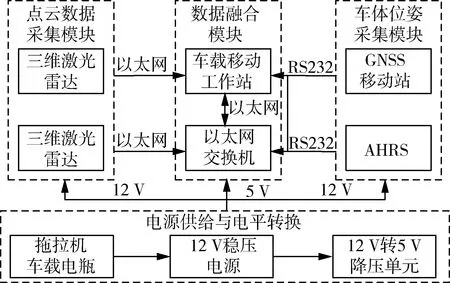
圖5 點云采集系統通信與供電通路圖Fig.5 Point cloud acquisition system communication and power supply path diagram
接著將從土壤、整機、環境采集到的數據再傳輸給拖拉機試驗臺架的處理器,目前測試平臺所采用的數據傳輸方案大致可分為有線傳輸和無線傳輸兩種,有線傳輸的方案由于導線容易磨損和布線難等問題并不適用于疲勞性測試項目,而現有的無線技術已經完全能夠滿足大部分系統的傳輸速度需要。
最后拖拉機試驗臺架的處理器對試驗數據進行處理分析,通常處理步驟為降噪、濾波、擬合、特征提取。在分析試驗數據特征的基礎上,對試驗數據進行降噪處理,采用合適的信號降噪處理方法可以提高測試的可靠性、減少試驗次數和降低測試成本,保證試驗數據能更真實地反映拖拉機試驗臺架的動態響應,目前試驗數據的常規降噪方法主要是基于傅里葉變換的降噪法、小波變換降噪法和奇異值分解法[44],如表2所示為所述降噪方法的優缺點分析。文獻[45]提出一種采用小波降噪與短時傅里葉變換相結合對主軸振動特征信息進行準確提取的方法,該方法可以對主軸運行過程中產生的非平穩信號進行降噪處理。近年來,神經網絡技術由于具有自適應性、自組織性、學習能力等優勢,而被應用于試驗數據的處理中,通過設計并訓練神經網絡模型,使得信號降噪數據處理的精度得到提高。在拖拉機試驗臺架數據采集的過程中得到的數據往往不僅存在噪聲,還有一些隨機的不規則的干擾信號,這些干擾信號分成內部和外部干擾兩種,外部干擾主要來源于各種電器設備,比如用電設備的啟停、脈沖電流、可控硅整流、大電流輸電線周圍產生的交變磁場;內部的干擾主要是裝置本身引起的各種干擾。為了剔除和減少這些不規則干擾信號,需要對其進行濾波,常規的濾波方法有卡爾曼濾波、均值濾波、中值濾波和高斯濾波。在試驗數據經過降噪和濾波處理之后,利用Matlab對試驗數據進行擬合處理,擬合方法有最小二乘法、多項式的插值擬合、Bezier曲線的插值擬合、B樣條曲線擬合,最小二乘法是最普通的擬合方法,但擬合的曲線容易失去拐點信息,一些重要數據甚至會出現嚴重的失真,使用三次的B樣條或者Bezier曲線進行逐段擬合,通過反算控制點,進行擬合曲線的優化是解決拖拉機試驗臺數據處理的一種較好的方法,并且易于計算機實現[46]。之后對試驗數據特征進行提取,提取方法有時頻域三種方法,特征提取時域方法為脈寬特性和波形比較法,時頻域結合的方法為小波變換模最大值和歐氏距離結合法,處理后的數據上傳至PC端進行顯示并存儲。

表2 常用降噪方法及其優缺點Tab.2 Common noise reduction methods and their advantages and disadvantages
4 試驗結果評價技術
不同的試驗臺架其試驗結果評價指標也不盡相同。與道路車輛不同,拖拉機的動力性以犁耕工況下的牽引力、牽引效率及運輸工況下的爬坡度、最大載質量作為該驅動系統的動力性能評價指標,混合動力拖拉機的經濟性以犁耕工況下勻速行駛的燃油消耗率、小時平均電能消耗量和等效能耗作為其經濟性能評價指標。
農業拖拉機的機動性從動力輸出軸性能、牽引性能、液壓提升性能三方面評價,環保性從燃油消耗量、廢氣排放量、小時平均電能消耗量三方面評價,安全性從翻車保護裝置(ROPS)性能、制動性能、視野范圍三方面評價,舒適性從噪聲和振動舒適性能方面評價。文獻[47]基于拖拉機動力輸出軸(Power Take-off,簡稱“PTO”)試驗臺,設計了改變拖拉機配置和試驗輸入因素的比對試驗,分析了現行標準和企業需求,確定了試驗臺測控系統的參數指標,完成了試驗臺的整體設計;文獻[48]為開展節能環保拖拉機特別是混合動力拖拉機提供了動力耦合裝置設計方案,該裝置能夠滿足拖拉機工作狀態下的工作特性要求;文獻[49]根據代表農用拖拉機安全問題的機械危害、防護裝置(ROPS)、人體工程學和用戶行為等方面進行系統的文獻綜述,描述了拖拉機在工程領域的安全狀況,為進一步研究概述的新興主題奠定基礎;文獻[50]梳理了拖拉機座椅舒適性評價方法和不同減振結構的座椅懸架研究現狀,提出應構建更精準的基于人體生理特征的評價體系,結合當前的新材料與新技術,不斷提升拖拉機座椅的性價比和舒適性。拖拉機試驗臺架試驗結果評價指標錯綜繁多,如果使用傳統的單維評價,就難以實現試驗結果的客觀、準確評價,現多利用層次分析法(AHP)、模糊綜合評價法和人工神經網絡分析法進行評價。如表3所示為試驗結果評價方法的特點及不足之處,綜合考慮評價方法的特點和不足,通常將模糊綜合評價法與層次分析法相結合應用于試驗結果評價中,充分發揮各自的優勢,可以使試驗結果的評價更加科學合理。
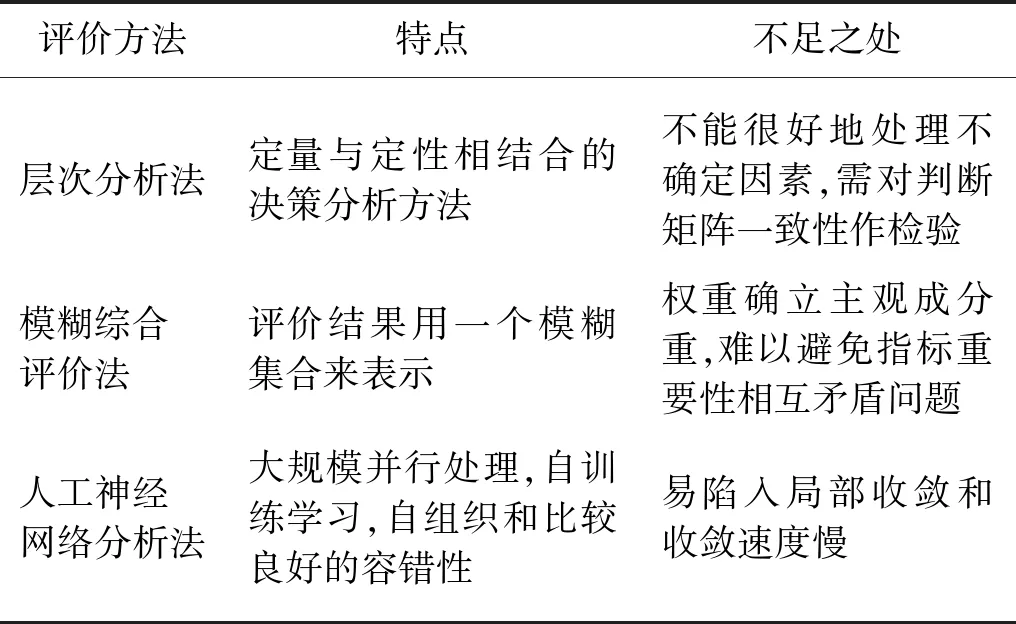
表3 試驗結果評價方法Tab.3 Evaluation method of test results
5 展望
從動力總成、負載模擬、數據處理、結果評價4個方面結合國內外最新進展對拖拉機室內臺架試驗關鍵技術進行深入的總結和分析,拖拉機室內臺架試驗關鍵技術的發展對拖拉機試驗臺的性能指標起著導向性作用。今后拖拉機室內臺架試驗技術的發展方向為以下幾個方面。
1)目前,動力總成控制技術的研究工作多側重于第一大類簡單“附件式”混合動力系統的發動機啟停控制、能量分配控制、制動能量回收、混合驅動模式切換過程動態控制等方面。動力總成控制技術的發展趨勢為探索不同優化控制算法的互相協同與融合,實現復合控制,以獲取最優的綜合控制性能。動力總成控制系統研發的關鍵在于控制軟件的開發和控制策略的優化,國內研發者開發的軟件系統通常是針對局部工藝流程開發的,算法研究則大多數是在Matlab,Python等編譯環境下進行的,仿真的精度有待提高,從研究到工業應用的研發周期也長。因此,未來應自主開發兼容多種編譯環境的運行優化控制集成系統的農機控制軟件平臺。
2)要在臺架上研究拖拉機動力系統的動態特性,關鍵是需要測功機能模擬整車在動態工況下的負載,而動態工況負載模擬算法是實現負載模擬的關鍵,國內對負載的模擬主要集中在穩態負載模擬方面,這已不能滿足拖拉機試驗的需求。今后應不斷優化動態工況負載模擬算法,提高負載模擬算法精度,實現動態負載模擬算法在測功機上的應用。
3)試驗數據的處理首先要解決的問題就是試驗數據的采集,傳感器的性能直接影響試驗數據采集顯示系統的整體性能,由于農田環境的復雜性,在今后的發展中應采用多傳感器或者激光雷達的形式對數據進行采集[51]。針對試驗數據的降噪方法,未來應采用主成分分析提取有用信號的方法,結合設計訓練神經網絡模型,提高數據降噪精度。設計試驗臺測控系統必須解決好過程控制數據濾波問題,未來結合WinCC平臺,優化數據濾波算法,既在前端自動化設備上采取硬件濾波措施,也采取軟件數據濾波措施。為獲得比較合理的試驗數據擬合結果,今后應考慮試驗數據的權重系數,用粒子群算法改進目標函數,結合BP神經網絡算法,提高非線性試驗數據的擬合能力。基于MATLAB試驗數據分析方法,開發試驗數據處理軟件,才能提高拖拉機試驗臺試驗效率和質量。
4)拖拉機試驗臺試驗結果評價涉及的因素較多,邊界模糊,較復雜,且存在多層次的關系,應使用層次分析法和模糊綜合評價法對試驗臺試驗結果進行評價。由于單一評價法存在自身缺陷且受評價主體主觀影響大,未來的試驗結果評價趨勢是采用組合評價法,對試驗結果進行定性與定量的分析,對評價結果進行檢驗,形成評價結果檢驗系統理論,使評價過程更加客觀、有說服力,使試驗結果更加準確合理。
6 結論
本文主要從動力總成控制技術、負載模擬技術、試驗數據處理技術和試驗結果評價技術4個方面對拖拉機室內臺架試驗技術的現狀進行分析與展望,指出動力總成控制算法優化、動態工況負載模擬算法優化、試驗數據處理方法的前沿性、試驗結果評價的客觀性是我國拖拉機室內臺架試驗技術發展方向,拖拉機室內臺架試驗的研究是對我國測試領域的補充,對拖拉機的理論研究和技術成果的推廣具有重要意義。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
現代檢驗醫學雜志(2016年3期)2016-11-15 01:59:56
中學語文(2015年21期)2015-03-01 03:52:11
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
西南軍醫(2015年1期)2015-01-22 09:08:16
中國音樂教育(2014年9期)2014-05-20 10:26:24
治淮(2013年1期)2013-03-11 20:05:18
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51