基于紅外技術測距儀的設計與實現
2022-01-20 13:29:18張亦勛
電子制作 2021年24期
張亦勛
(廣州城市理工學院,廣東廣州,510800)
0 引言
紅外測距首次出現在1960年代,出現時被人們認為是一種以紅外線為主體的測量方法。研究紅外距離具有非凡的意義,其本身具有其他測距模式沒有的特點,技術難度相對較小,性能好,簡單,易于使用,系統成本低,在各行各業都扮演著不可或缺的角色,因此其市場需求更大,更廣泛的發展空間。
紅外測距儀最大的優勢是短距離測量的精準性。使用調制紅外光測量范圍通常是1~5公里,在100米范圍內的超聲波測距有優勢,但超聲波測距不能檢測區域內1米距離,而紅外測距儀可以精確到1米以內的距離。本研究設計與實現的是一個10~50cm精準測量的紅外測距儀。
1 紅外測距原理
■1.1 時間差法測距原理
■1.2 反射能量法測量原理
■1.3 相位法測距原理
■1.4 三角法測距原理
三角測量法的原理是由紅外發射管和一個PSD實現(傳感裝置位置的位置傳感裝置)和相應的計算電路來實現。而夏普公司的PSD有更優越的性能,它可以檢測微小位移的光落在它的上面,解決微米以上的測量,紅外傳感器GP2Y0A21使用此功能實現精確測量距離的目標對象,如圖1所示。
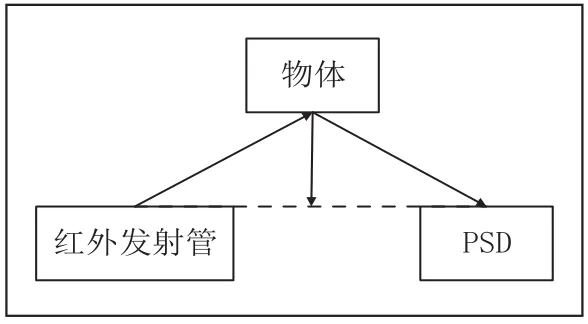
圖1 三角法測距原理
首先通過紅外發射管紅外傳感器,紅外距離遇到障礙下降反映了PSD上形成了一個等腰三角形。和其他兩個點是固定的,由管和紅外發射管PSD的距離是已知的,可以使用三角函數計算高這個數值就是想要測量的距離。
相比較其他的測距原理,三角測量法的精度更加高,利于實現,而且受外界因素的影響,以及自身的誤差率更低,因而本設計采用此原理來實現對待測物體距離的測量。
2 紅外測距儀硬件設計
■2.1 紅外測距系統基本結構圖
第一步紅外傳感器模塊GP2Y0A21YK0F發送紅外線;第二步到達物體后反射紅外線;第三步紅外傳感模塊接收反射后的紅外線;第四步傳感器模塊將信號發送給單片機處理模塊;第五步經過模數轉換將非線性的模擬信號轉換為線性的數字信號;第六步由單片機處理模塊發送數字信號到液晶顯示模塊;第七步最后結果表明在液晶顯示模塊LCD1602上,如圖2所示。
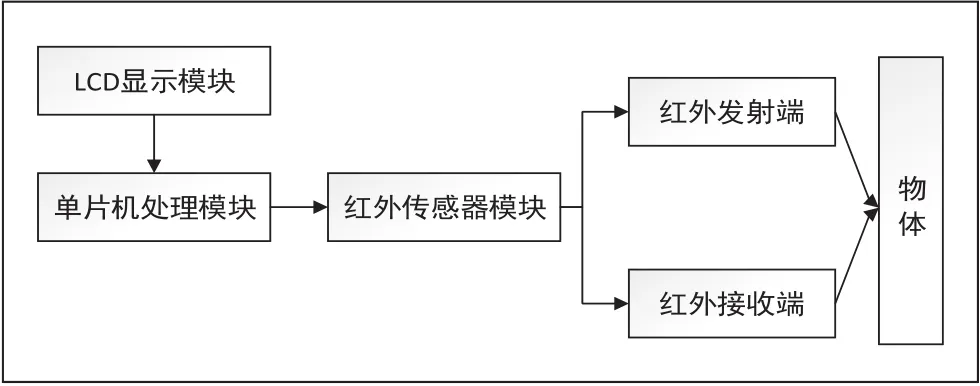
圖2 基本結構圖
■2.2 各硬件電路設計
本研究所設計的紅外測距儀主要包括了A/D轉換電路,1602顯示電路,電源輸入電路,上電復位電路,蜂鳴器、獨立按鍵電路,程序下載電路等硬件電路。
(1)A/D轉換電路。本研究選取ADC0832 轉換芯片,其最高分辨可達256級,可以適應一般的模擬量轉換要求。其內部的電源輸入和參考電壓的復用,使得芯片的模擬電壓輸入0~5V。芯片切換時間僅為32μs,具有雙輸出的數據可以作為檢查數據,為了減少誤差數據,轉換速度快、性能穩定。獨立的芯片使能輸入,設備的懸掛和處理器的控制變得更加方便。通過數據輸入,可以很容易地實現信道的功能選擇。
(2)1602顯示電路。單片機P0-P7口分別接D1~D7,同時接上排阻,而在排阻另一端接上VCC,單片機的P34接EN,P35接RS,單片機通過P0口向1602顯示頻輸送數據,顯示測得的距離。
(3)電源輸入電路。電源電路是單片機能否正常工作的基礎,在本設計中由于傳感器需要所以電源需要保持在一個穩定的狀態,默認為5V的環境下。電源模塊對應的接線方法為:單片機的第40引腳(VCC)為電源引腳;第20引腳(GND)為接地線。
(4)上電復位電路。復位電路的設計好壞直接影響單片機系統的穩定性,因為在單片機的瞬時電源電壓是不穩定的,單片機不能立即投入工作,需要繼續保持一段時間的復位狀態,直到一個穩定的電源供應器開始工作。本設計中采用的是最簡單的上電復位方式,也就是說,在經過一段時間后的上電后,由于電容的作用后,單片機會過段時間再開始工作。
(5)蜂鳴器、獨立按鍵電路。單片機 P20~P24接獨立按鍵模塊,分別對應S2~S5,S4功能為減10cm,S3功能為加10cm,S2功能為切換上下限設置,S1功能為RESET。蜂鳴器,會放出蜂鳴一般的響聲,當距離達到所設置的閥值時,蜂鳴器響起,同時LED警示燈也會亮起,進行報警提示。
(6)程序下載電路。USB串口是計算機USB接口的通用串行接口之間的轉換。作為最廣泛使用的USB接口,每臺計算機都是一個必不可少的通信接口,它最大的特點是支持熱插拔,即插即用,快速傳輸速度。沒有串口的計算機提供一個快速通道,USB串口設備的使用是相當于傳統的串口設備的即插即用USB設備。在本設計中,程序下載是通過USB轉TTL的下載器來實現的,RXD接TXD,TXD接RXD。
■2.3 總電路原理圖
采用EDA技術匯總A/D轉換電路,1602顯示電路,電源輸入電路,上電復位電路,蜂鳴器、獨立按鍵電路,程序下載電路,可得本設計總電路原理圖,見圖3。
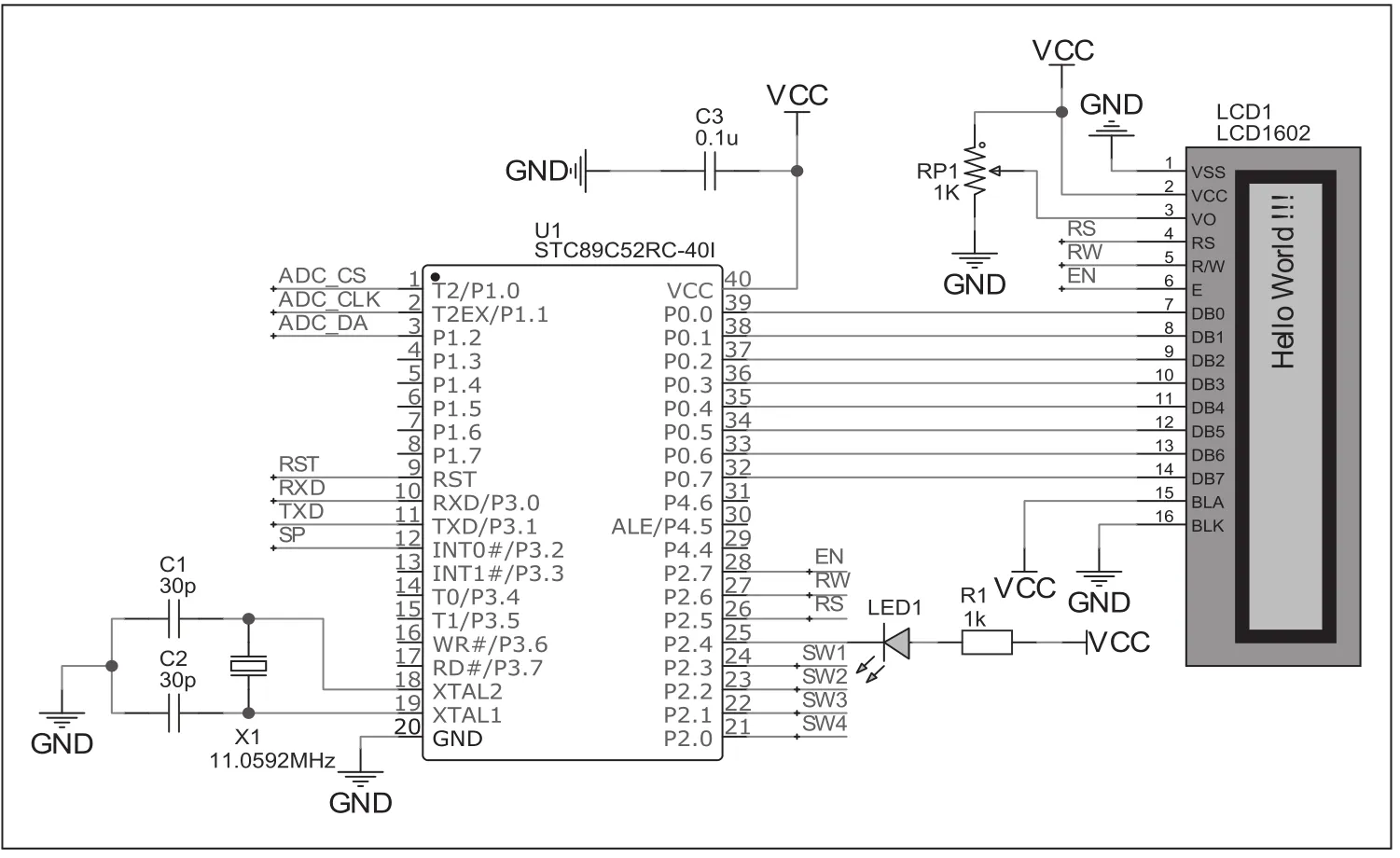
圖3 總電路原理圖
3 紅外測距儀軟件設計
整個系統運行的過程中,紅外系統啟動時,首先將AT89C52單片機初始化。當AT89C52單片機接收紅外接收電路傳輸電壓信號,經過A / D轉換程序,將單片機之外的模擬信號轉換成單片機可識別的數字信號,并根據距離和電壓轉換子程序,將電壓的轉換為距離。最后,在實時動態顯示在液晶顯示器上。主程序流程圖如圖4所示。
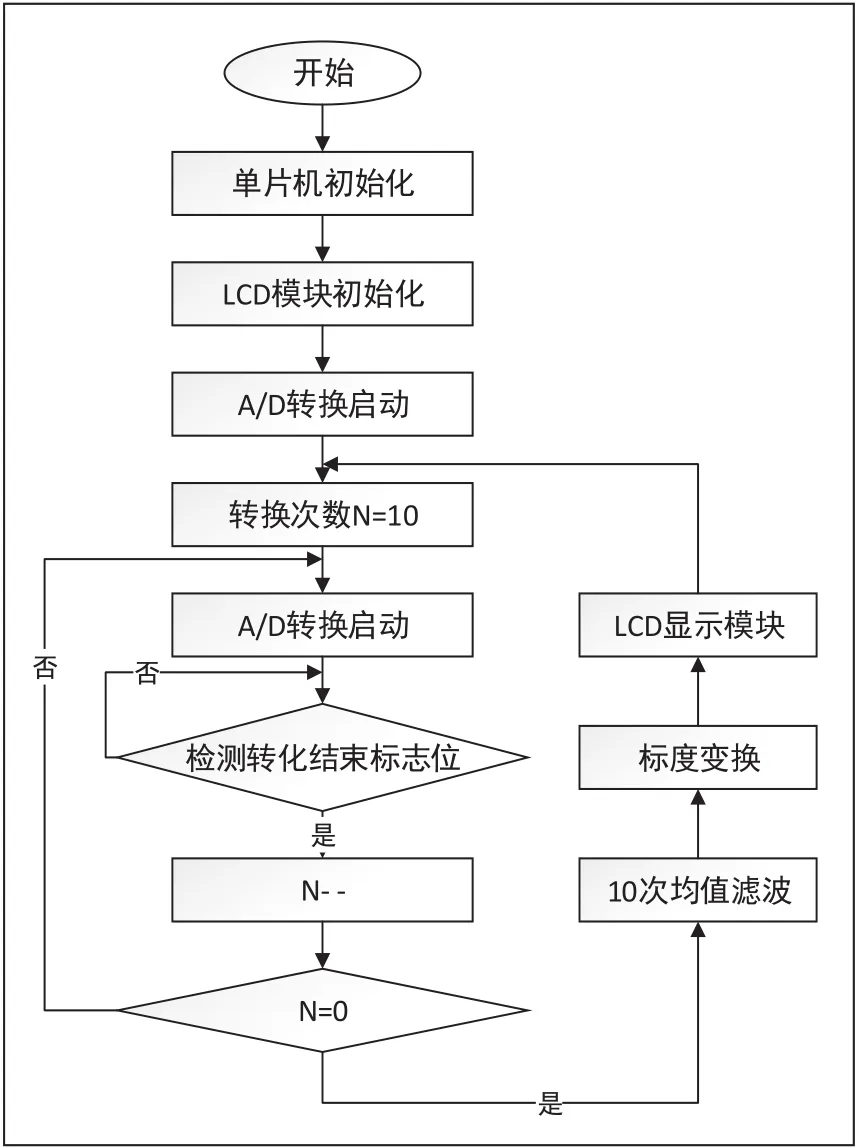
圖4 主程序流程圖
本研究中的紅外測距的軟件設計主要由主程序、延時函數、顯示程序函數、測距計算函數組成。程序開始,主程序第一步先將1602顯示屏進行初始化,然后開始測量。

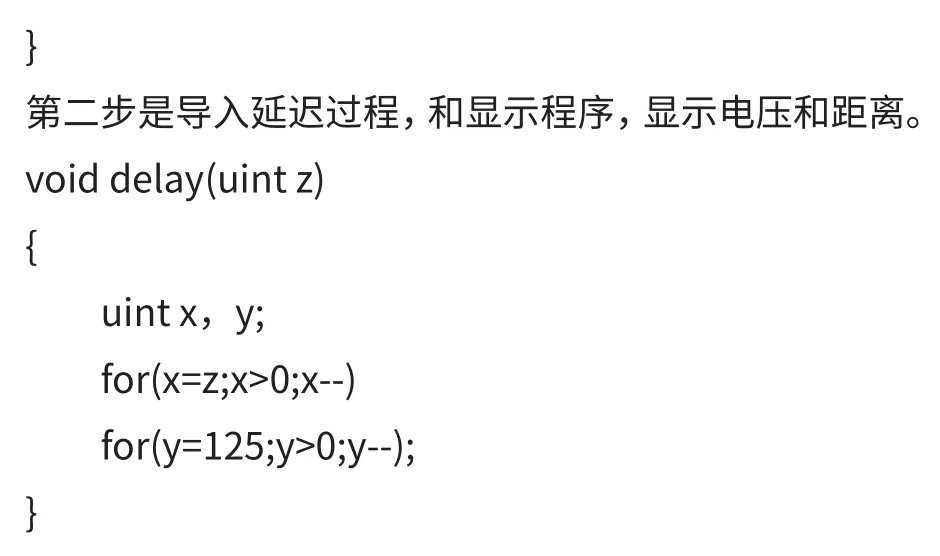
調用子函數,經過A/D轉換函數得出的電壓值,再次調用距離計算函數,得出距離值。這個時候的主函數將顯示測量計算得出的距離值,然后結束程序。
該程序使用多個調用函數,讀取/數、距離的計算函數、算術平均濾波程序。收集和計算的價值;LCD忙標志判斷函數,寫數據子函數,寫命令子函數,顯示數據調整功能,字符串顯示功能,顯示子程序顯示功能;1602初始化函數,LCD屏則是清除屏幕功能。
4 紅外測距儀運行與測試
本研究設計的紅外測距儀成品,如圖5所示。
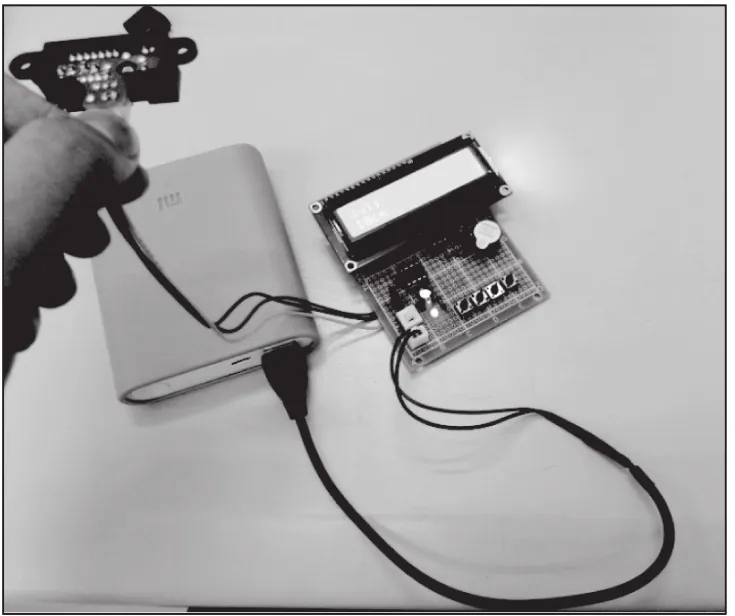
圖5 紅外測距儀成品圖
通過程序數據線性化分析,本研究設計的基于紅外技術的測距儀,在測量10~50cm的物體時結果較為精準,若物體距離小于10cm或大于50cm,數據不具有明顯代表性,設置紅外測距儀進行報警處理。具體測試結果見表1。
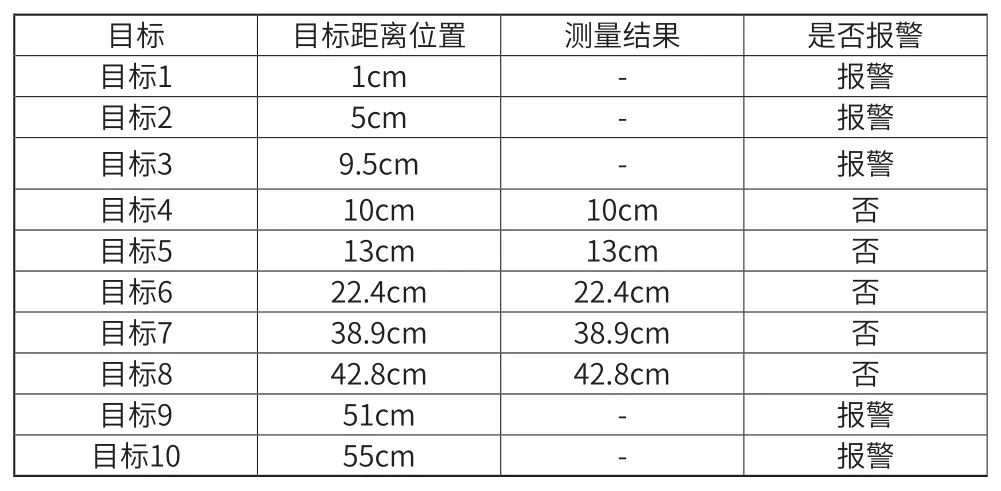
表1 測試結果
5 結論
本研究設計與實現的紅外技術測距儀,標定了測量范圍在10~50厘米平面物體。最大誤差是0.01厘米,可以在很短的時間內多次的測量,紅外測距系統穩定性好,具有較高的敏感性,結構簡單,能得到較為精準的測量值,具有一定的研究價值。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
人大建設(2019年12期)2019-05-21 02:55:44
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21