超高頻RFID不同信號特征參數的室內定位方法
2022-01-21 05:10:48黃鳳英夏靖波
福州大學學報(自然科學版) 2022年1期
黃鳳英,夏靖波
(廈門大學嘉庚學院,福建 漳州 363105)
0 引言
隨著無線技術的發展,基于超高頻射頻識別(radio frequency identification,RFID)的定位系統可以從附帶低成本、易于部署的RFID標簽上獲得物體的位置信息,并為室內物品位置定位或跟蹤提供有效的解決方案.在近年來的實際應用中,超高頻RFID技術可以通過幾個固定天線或虛擬天線陣幫助跟蹤在傳送帶上的移動物品[1],可以通過智能圖書館或超市中配備超高頻RFID閱讀器的自動化機器人幫助查找放錯的書籍或商品[2],還可以利用人員在移動過程中,對超高頻RFID通信鏈路的多普勒頻偏影響來了解人員運動軌跡[3].受這些重要應用的啟發,室內定位需求越來越大.
根據超高頻RFID系統的通信原理,閱讀器和標簽之間通過無線射頻信號進行通信,因此可以根據通信過程中的不同信道特征參數來估計待測標簽的位置.目前用于定位的信道特征參數主要基于以下4類: 基于接收信號強度(received signal strength indicator, RSSI)[4],基于到達相位(phase of arrival,POA)[5]或者基于到達相位差(phase difference of arrival,PDOA)[6],基于到達時間(time of arrival,TOA)[7]或者基于到達時間差(time difference of arrival,TDOA)[8],以及基于到達角度(angel of arrival,AOA)[9].在基于這些信道特征參數進行標簽定位過程中,為了進一步提高定位精度,研究者們提出了不同的定位處理方法,如幾何定位法,指紋定位法,全息圖法等.但考慮到實際應用環境復雜、多徑傳播等不確定性因素仍然對定位精度產生較大影響.因此,在盡可能降低算法復雜度和成本下,為進一步保證定位精度和準確度,基于超高頻RFID的室內定位技術仍需要不斷地改進和完善.
1 標簽定位特征參數
在超高頻RFID的室內定位中,研究人員利用接收信號強度、到達相位、到達時間和到達角度等信道特征參數信息與目標位置建立相應關系,從而估算出待測標簽位置.
1.1 信號強度
基于接收的信號強度[10]的標簽定位方法以自由空間傳播模型或路徑損耗模型為原理,通過閱讀器測量標簽射頻信號強度從而估算出待測標簽的位置[11].
Friss電磁波自由空間傳播模型指出,標簽與閱讀器之間距離為d時,其反射的電磁波能量PB為

(1)
其中:PR表示閱讀器的發射功率;GRS表示閱讀器的發射天線增益;σ表示標簽反射電磁波的能力度量,其值主要取決于標簽自身的物理特性.
閱讀器天線與標簽距離為d處的功率密度Sd
(2)
閱讀器接收天線的增益GRR與閱讀器接收天線的有效面積AR關系為
GRR=4πAR·λ-2
(3)
其中,λ表示信號的波長.因此,閱讀器天線接收到的標簽反射功率PRB為
(4)
通常情況用閱讀器接收到的信號強度值RSSI來表示相對應的接收功率PRB[12-13],公式(4)可變成

(5)
從公式(5)可看出,信號強度與標簽到閱讀器之間距離d的四次方成反比.所以在自由空間中,根據該模型即可估算出閱讀器與標簽之間的距離.但由于室內環境通常比較復雜,自由空間的傳播模型并不適用,因此對數路徑距離損耗模型被提出用于障礙物、移動物體等多徑效應較強的室內環境,該模型為

(6)
其中:d0表示已知參考標簽與閱讀器的距離;PL(d0)表示閱讀器在自由空間中與標簽距離為d0時所接收到的信號功率;n是路徑損耗指數,取值依賴于系統環境,用來表示路徑損耗隨著距離增加的系數;Xθ是標準偏差為θ并服從正態分布的隨機誤差,用于表示環境噪聲.
若閱讀器發射功率為PR,與閱讀器天線距離為d處的標簽反射功率為PB,則有

(7)
閱讀器接收到與天線距離為d的標簽反射功率為PRB,則有

(8)
最后用閱讀器天線接收到的RSSI來代替PRB.由此可知,基于對數路徑距離損耗模型可以通過已知位置的參考標簽計算出待測標簽的距離.
基于接收信號強度RSSI的經典算法有LANDMARC[4]、VIRE[14].在此基礎上,Huang等[12]提出了三角定位方法,Zhao等[13]提出基于聚類策略的定位方法;而OTrack則建立了識別暫態關鍵區域的概率模型[10],Yang等[15]提出一種基于非線性支持向量回歸和粒子群優化的方法來定位目標標簽位置.然而,在真實的RFID應用場景中,由于室內空間環境的噪聲及多徑路徑干擾,影響接收信號的RSSI值,給基于RSSI定位系統的定位精度帶來巨大挑戰,所以誤差處理是基于信號強度進行定位的一個重要環節.
1.2 射頻相位
有些閱讀器可支持獲取相位參數指標,如ImpinJ R420[16],其接收信號的相位值分辨率可達0.001 5 rad,可計算出理論距離分辨率為0.038 mm[17].因此,相對于RSSI,相位對信號傳播距離比較敏感.
在閱讀器與標簽進行反射鏈路通信時,當閱讀器天線發送某一頻率f的載波信號后,又將接收到經標簽反射回的信號,可得出相位值與距離的關系如下

(9)
其中:λ是載波波長;dreader_tag為閱讀器到標簽的距離;c為光速;t為閱讀器發射信號與接收到信號的時間差;φ為接收信號和發射信號的相位差. 假設閱讀器發射信號的初始相位為零,則φ即為標簽接收信號的到達相位.再將式(9)變為
(10)
但實際情況下,相位值φ是一個周期函數,周期為2π,即2nπ<φ<2(n+1)π, 0<ωt<2π,而閱讀器調制解調得到的相位值φ′僅為相位主值,因此有
|φ-φ′|=2nπ
(11)
實際應用中由于n未知,所以只通過式(11)無法直接準確得到距離.只有當相位值在單周期內時,即

(12)
得到的測距結果才是正確的,因此最大不模糊距離為
dreader_tag_max=λ/2
(13)
由此可知,簡單依靠式(10)進行相位測距,其定位距離范圍是有限的[5].為了消除整周期相位模糊的影響,多組相位測量差值(PDOA)方法被提出.如,Han等[18]利用標簽在不同位置處所產生的相位差,來估計多普勒頻偏,從而對標簽移動速度進行測算;Povalac等[6]和Qiu 等[19]利用不同頻率的載波對標簽進行通信時所產生相位差進行測距.近年來,利用接收信號的相位特征參數進行室內定位,在精度上取得了很大的突破,由此受到越來越多研究者的關注.
1.3 信號到達時間

圖1 基于信號到達時間的定位模型Fig.1 Location model based on TOA
基于信號到達時間(TOA)的定位方法,其主要原理是根據不同閱讀器接收到標簽返回的信號時間差來估算兩者之間的距離,再通過相關算法進行待測標簽位置估算.
已知從閱讀器發射信號到標簽接收信號的時間差為t,射頻信號的傳播速度為vp(自由空間vp等于光速c),從而得到閱讀器與待測標簽之間的距離d為
d=vpt
(14)
同樣,用該方法計算出每個閱讀器與待測標簽的對應距離.基于信號到達時間的定位模型如圖1所示.
已知閱讀器R1、R2、R3的坐標分別為(x1,y1)、(x2,y2)、(x3,y3),設待測標簽T的坐標為(x,y),則根據幾何公式可得

(15)
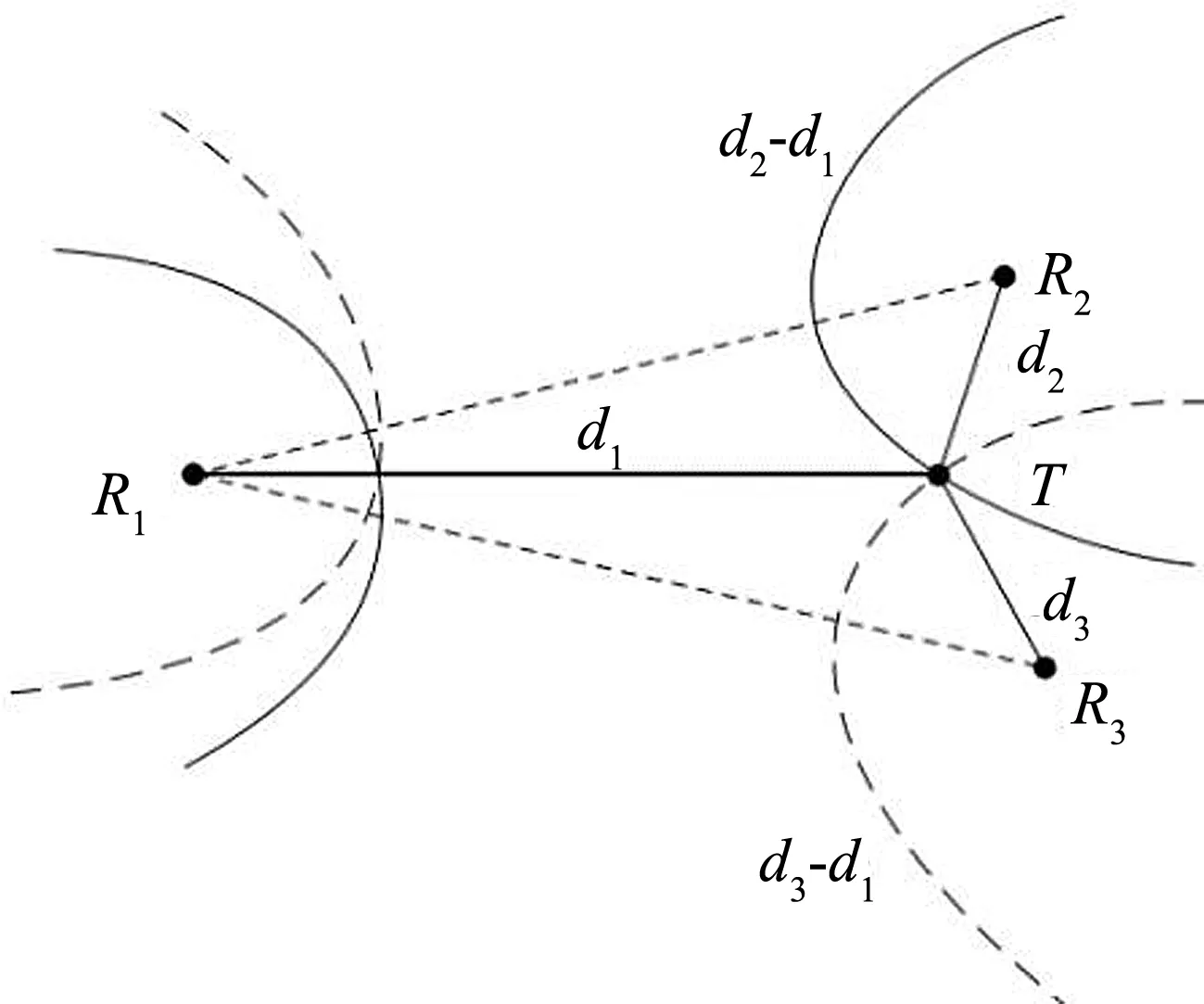
圖2 基于信號到達時間差的定位模型Fig.2 Location model based on TDOA
由式(15)可解出x和y值,該值即為目標標簽的位置坐標.然而,該方法的前提是閱讀器和目標標簽均能實現時間同步,且要求時鐘具有納秒級別的精度[7];否則,由于信號傳播速度很快,一點時間偏差都將引起較大的距離誤差.
Stelzer等[8]在TOA方法基礎上利用目標標簽信號到達多個閱讀器之間的相對時間差來計算它們之間的相對距離,然后用已知位置關系的閱讀器計算出絕對距離.基于時間到達差TDOA的定位方法,通常采用的是雙曲線定位方法, 其定位模型如圖2所示.
若用di_j表示目標標簽分別與第i個閱讀器和第j個閱讀器之間的距離差,則根據式(15)可得
di_j=di-dj

(16)
相應地,可計算d2_1和d3_1分別為

(17)
根據以上公式可推出

(18)
根據式(16)與(18)可得到以下公式

(19)
通過以上推導可以看出,式(19)為一個以x,y,d1為未知數的線性方程組,可以再通過最小二乘法或加權最小二乘法來計算目標標簽的位置.
無論是基于 TOA 還是 TDOA 的定位方法,都要用到射頻信號在傳播過程中的時間差值,因此要求閱讀器和標簽之間的時鐘能夠同步,且時間精度高[8].
1.4 信號到達角度

圖3 基于AOA 的定位模型Fig.3 Location model based on AOA

圖4 相控陣天線原理Fig.4 Principle of phased array antenna
基于AOA的定位方法一般布置2個或2個以上的閱讀器,對于每一個閱讀器都可以通過天線獲得標簽的信號角度信息;也有些閱讀器集成有陣列天線,可以用一個閱讀器的不同天線單元獲取標簽信號角度信息,并以它們信號的角度方向所產生的交點來確定標簽位置[9].基于AOA的定位模型如圖3所示,R1和R2是兩個位置已知的閱讀器,坐標位置分別為(x1,y1), (x2,y2),T為待測標簽,根據幾何原理可知

(20)
由式(20)可計算出x,y值,從而計算出標簽所在的位置.使用該測量方法僅需要測得角度就可以算出距離,簡單易操作,但很多閱讀器并不能直接獲得角度信息,近年來,有一些研究者結合相控陣天線理論[20-21],為在實際情況下開展標簽到達角度的定位提供了新的思路.
相控天線原理如圖4所示,λ表示載波波長,d代表天線陣元之間的距離,由此可計算相鄰陣元間的相位差Δφ為
( 21)
該天線的輻射角度θ可由式(21)計算為

(22)
陣列天線的陣元間距和陣元數量通常是固定的,因此,粱笑軒等[21]提出一種基于相控陣的距離自由標簽定位方法(phased array based range free tag localization,PATL),其通過移相器來調節不同的輻射波束角度,然后通過對目標平面進行依次掃描,并統計標簽出現的次數,最后利用加權算法進行標簽的二維位置定位.
以上基于AOA的定位方法雖然在原理上比較容易理解,但實際應用過程中對天線設備要求比較高,一般需要在閱讀器上安裝陣列天線,才可達到較好的定位效果.
2 標簽定位處理方法
通過前一節對4種不同信號特征參數定位方法的分析可知,無論采用哪一種方法進行標簽距離定位,都或多或少地存在諸如定位系統復雜、易受干擾、精度低等的不足.為了進一步提高定位準確度和精確度,研究者們提出了數種標簽定位處理方法.目前常見的定位處理方法可以大致分為幾何定位法、指紋定位法、全息圖法等[22].
2.1 幾何定位法
幾何定位法主要是通過所獲得信號參數信息建立相對應的線性或非線性方程組,然后通過求解方程組的值,來計算待測標簽位置,如公式(5)、(8)、(15)、(18)、(19).對于求解建立的非線性方程組,大多采用最小二乘法、梯度法等[22].如Hightower等[23]基于信號強度與距離的關系,采用最小二乘迭代法來對標簽位置進行估算;文獻[24]是基于到達時間差和一種梯度博弈標簽位置的估計方法;Liu等[25]提出采用雙曲線進行遞歸計算來縮小可能區域范圍,最后估算出標簽位置;RF-Scanner通過相位剖面上的雙曲線擬合曲線來獲取標記位置[26].
2.2 指紋定位法
指紋定位法的思想一般分為兩個階段: 一是建庫,二是匹配.首先在環境中部署大量的已知位置的標簽,通過閱讀器分別獲取它們的信號強度值,并存入后臺數據庫中,然后將接收到待測標簽的信號強度值一一和庫中的強度值進行比對,最后選擇信號強度值最接近的已知標簽位置作為待測標簽位置.在指紋定位法中,大部分研究者采用機器學習理論思想,如K鄰近算法 (K-nearest neighborhood,KNN)[4, 27]、神經網絡算法[28-30]、卡爾曼濾波法[31]、最大期望估計[32]、貝葉斯概率算法[33]和支持向量基[34]等.另外,Han等[35]為降低部署成本和系統復雜度,在建立指紋庫時提出通過插值法擬合虛擬標簽.
2.3 全息圖法
全息圖法通常將待搜索的二維平面或三維空間分割成為一個個位置像素點,并通過閱讀器天線在不同位置上采集標簽相位信息,每個天線測得的實際相位值與天線到每個像素點的理論相位到建立復指數函數,根據計算得到的復指數大小來估算待測標簽的位置.研究者們[17, 36-38]通過標簽的運動移動或閱讀器天線的移動來模擬虛擬陣列天線,并獲取對應的標簽相位信息,從而構造不同全息圖來實現高精度的定位.例如,Tagoram提出一種差分增強全息圖(differential augmented hologram,DAH)定位方法[17]來減輕環境熱噪聲和標簽多樣性的影響;Shangguan等[2]提出了一種新的多徑抑制技術,即創建具有多載波頻率數據、魯棒性更好的全息圖;FaHo設計了一種魯棒性更好的全息圖,探討了目標標簽可能存在的所有位置的可能性,并提出將全息圖與深度卷積神經網絡算法相融合來抑制多路徑效應[36].
以上3種定位處理方法由于算法復雜度不同,導致定位實時性也不同.一般情況下,指紋估計法相比幾何估計法在復雜的室內環境下能夠獲得較高的定位精度,但由于離線階段指紋庫的建立時間花費較多,指紋匹配算法的計算量較大,因此,整體的定位實時性也較差.而全息圖方法是通過遍歷搜索空間的方式,相比指紋估計法其免去了指紋庫的建立過程,定位實時性更能滿足要求.
3 定位方法比較
為了更加全面了解超高頻RFID室內定位的關鍵技術,本研究從測距類型、定位處理方法、精度、基礎設施等方面,對基于不同特征參數的定位方法進行簡要對比[39],其對比結果如表1所示.

表1 不同信號特征參數的定位方法對比
4 總結與展望
通過對文獻進行分析,可將超高頻RFID定位類型分為兩大類: 測距法和非測距法.測距法利用無線信號的不同特征參數,如信號強度,TOA,TDOA和相位來估計距離和角度,然后根據三邊、多邊、AOA等計算出目標的位置.非測距法主要基于場景分析,而不是直接使用距離和角度,該方法通常需要參考標簽來預先建立指紋數據庫,目標位置可以通過匹配射頻全息圖來預測,也可以通過指紋訓練的機器學習模型來預測.一般情況下,非測距法比測距法具有更高的精度和更好的抗干擾性,但在設施上需要更多的成本.無論哪種定位類型,離大規模實際應用仍存在一定距離.
基于多參數的混合算法和定位處理方法可以改善特定環境下性能的不足,或將為日后應用提供更佳的定位方案.在此,將對基于RFID室內定位技術總結以下幾個發展方向.首先,單一信號特征參數的測距定位模型具有較多的局限性,且沒能最大化地利用標簽反射信號的全部特征信息,因此,研究者開始提出結合多種特征參數信息的定位方法,即從單一定位特征參數轉向多個特征參數發展,如,利用在幾個測量點收集的相位差來估計接收信號的到達方向角,進而對待測標簽進行定位.其次,有些研究者在現有的定位處理方法上進行改進,如將測距法轉向非測距法,從幾何定位方法、指紋定位方法向全息圖法或其他方法發展.再者,從基礎設施構成來看,系統將從大量參考標簽、多閱讀器、多天線等向移動標簽、移動閱讀器、虛擬天線陣等低成本方向發展.最后,從實際應用前景來看,更多從單一的室內物品位置定位及追蹤向與增強現實、虛擬現實、人機交互等多學科相結合方向發展.
未來,隨著超高頻RFID室內定位技術的不斷發展,超高頻RFID將有望為開展物體空間信息感知技術提供新的發展機遇.當集成有閱讀器的智能機器人或設備具有空間位置感知能力時,結合增強現實、虛擬現實等,人們生產和生活的智能化程度勢必達到更高水平.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56