北斗星基增強技術在電網無人機巡檢中的應用
2022-01-21 06:15:08稂龍亞任新星
北京測繪 2021年12期
稂龍亞 楊 陽 嚴 波 劉 江 任新星 楊 凱
(1.國網信通產業集團安徽繼遠軟件有限公司, 安徽 合肥 230088; 2.國網安徽省電力有限公司, 安徽 合肥 230061;3.北京合眾思壯科技股份有限公司, 北京 100015)
0 引言
我國在衛星導航領域的發展日漸成熟,北斗導航定位技術已廣泛應用于電網調度、運檢及應急等領域[1]。北斗星基增強系統(BeiDou Satellite-based Augmentation System,BDSBAS),也稱廣域差分增強系統,是北斗三號系統(Beidou-3,BDS-3)中一項重要的技術,通過3顆地球靜止軌道衛星(Geosynchronous Earth Orbit,GEO)播發的B1C、B2a信號,向中國及周邊地區用戶多種修正信息,從而提高基本導航的定位精度。
全球范圍內已有多個國家開展星基增強系統的建設,美國廣域增強系統(Wide Area Augmentation System,WAAS)于2003年正式使用,文獻[2]對WAAS服務范圍內的測站定位精度進行分析,發現定位精度具有一定區域性,整體定位精度水平方向在0.4~0.8 m范圍內,高程方向在0.6~1.2 m范圍內,較偽距單點定位精度提升顯著。歐洲的地球同步衛星導航增強服務系統(European Geostationary Navigation Overlay Service,EGNOS)是針對全球定位系統(Global Positioning System,GPS)中L1、L5和Galileo中的E1、E5頻點提供服務[3],文獻[4]利用EGNOS+GPS處理策略分析阿爾及利亞地區的測站的定位精度,結果顯示在95%置信度下定位誤差優于2 m。日本的多功能星基增強系統(Multi-functional Transport Satellite-based Augmentation System,MSAS)由日本民航局主導建設,完全基于GPS衛星,文獻[5]研究了日本和中國地區的MSAS定位精度,結果顯示日本境內水平和高程定位精度分別優于0.69和0.97 m,且中國地區的增強效果更好。文獻[6]分析北斗二號的星基增強系統的偽距單點定位(Single Point Positioning,SPP)精度在E,N,U三個方向的定位精度為0.3,0.4,0.8 m,較基本導航SPP在三維方向精度提升53%。文獻[7]利用B1C電文和三個國內站數據評估了北斗三號星基增強定位精度,結果表明三個測站的星基增強定位在水平方向的平均精度為1.03 m,垂直方向為2.6 m(95%)。
除此之外,全球范圍內還有俄羅斯[8]、印度[9]和韓國[10]等國家也在積極建設各自的星基增強系統。
無人機技術已廣泛應用在輸電線路巡檢方面[11-12],其常采用載波相位差分技術進行定位,該方法需要在地面架設基站且定位精度會隨著基線長度的增加不斷下降。在電力線路巡檢時,巡檢區域較大且地質環境較為復雜,上述定位技術具有很大的局限性。本文基于北斗星基增強技術,設計了一種無人機自動巡檢硬件和軟件系統,利用星基增強接收機進行仿無人機動態實驗,研究北斗星基增強定位在無人機電力巡檢方面應用的可行性和可靠性。
1 北斗星基增強原理及改正算法
1.1 北斗星基增強工作原理
星基增強系統主要由空間部分、地面控制站、運行維護站和用戶四個部分組成,其工作原理如圖1所示。首先將收集分布于各地的監測站的觀測數據,主控站解算這些數據得到各種修正信息,注入站再將這些信息上傳至地球同步軌道(Geosynchronous Orbit,GEO)衛星,最后GEO衛星將修正信息播發給用戶,用戶利用修正模型即可提高定位精度。主要修正信息如表1所示。

圖1 星基增強系統基本工作原理

表1 BDSBAS主要修正信息
1.2 北斗星基增強GEO衛星位置算法
SBASL1電文中每個數據塊大小為250 bit,以250 bit/s 的基本數據率向中國及周邊地區用戶提供符合國際民航組織標準的單頻服務和雙頻多星座服務。利用電文信息,通過公式(1)和(2)計算GEO衛星t時刻的位置[13]。
t=tG-ΔtG=tG-|aGf0+aGf1(tG-t0)|
(1)
(2)
1.3 北斗星基增強GEO衛星位置算法
t時刻的衛星時鐘慢變改正數為
δΔtsv(t)=δaf0+δaf1(t-t0)+δafG0
(3)
式(3)中,δaf0為時鐘偏差;δaf1為鐘漂(如果速度編碼為0,該值為0);t0為改正數參考時刻;δafG0為GLONASS衛星改正參數,在電文12中播發,針對非GLONASS衛星,該值為0。
2 無人機電力巡檢系統設計
本文設計的基于星基增強技術的無人機自主化巡檢系統由硬件和軟件系統組成,其具備操作簡單、反應迅速、自主飛行等優勢。提高了電力線路巡檢的維護和檢修的速度及效率,可以在惡劣環境下采集輸電線路信息與衛星導航信號,極大地降低人工成本和安全性威脅。
2.1 硬件設計
硬件系統由主處理控制器、通信接口、云平臺相機等4大部分構成。主要部件功能如下:
(1)主處理器:處理無人機相關飛控數字信號及操作指令,并指揮無人機進行相關操作。
(2)通信接口:將控制信號數據轉換成讓主處理器識別的數據。
(3)云平臺相機:通過內置的兩組電機,使架設在云臺上的攝像機保持穩定,不會發生因飛行器震動而導致航拍圖像模糊的現象。
2.2 軟件設計
基于星基增強技術的電力巡檢系統主要由圖像無線傳輸系統和星基增強飛控傳輸系統組成,具體描述如下:
(1)圖像無線傳輸系統首先要輸入巡檢地區的三維地圖,之后根據選點要求和原則精確選定航線內拍照點,連接各拍照點規劃相應路線及速度,最后將這些信息傳輸至飛控系統中。
(2)星基增強飛控傳輸系統是在無人機依據規劃的飛行航跡時,實時接收GNSS導航信號和星基增強導航電文,通過內置的星基增強定位解算模塊,得出高精度定位結果,歷時不到1 s。將解算后的位置信息傳遞給飛控模塊,從而實現無人機的自主巡檢。
3 實驗分析
為了比較分析北斗單頻星基增強SPP和單頻基本導航SPP在無人機應用中的定位精度,本文利用北斗星基增強接收機在陸地上進行仿無人機飛行動態定位實驗,選取GPS全星座衛星的L1C頻點的數據。實驗選在空曠無遮擋地區,實驗時長約30 min,平均速度約為10 km/h,采樣間隔為1 s。在運動區域約1 km米處架設已知坐標的基準站進行短基線動態測量,將成功確定模糊度的解算結果作為飛行軌跡準確坐標,利用E,N,U三個方向的均方根(Root Mean Square,RMS)值分析星基增強SPP和基本導航SPP定位精度,從而判定星基增強定位在無人機電力巡檢方面的可行性與可靠性。圖2~3為基本導航SPP和星基增強SPP兩種定位模式E、N、U三個方向的定位誤差。
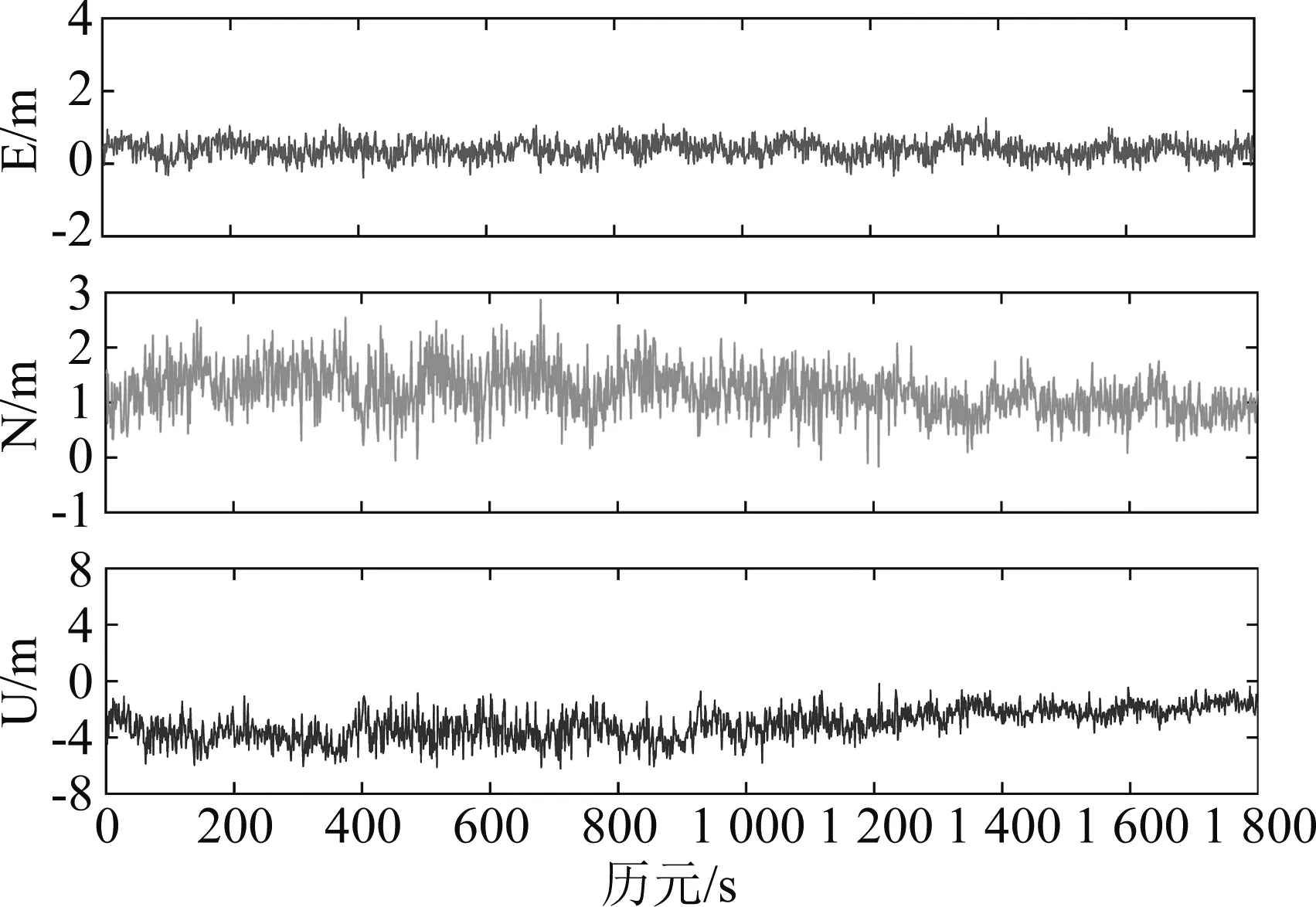
圖2 基本導航SPP定位誤差
圖3 星基增強SPP定位誤差
從圖2~3可以看出,在E方向星基增強SPP與基本導航SPP的定位精度基本一致。在N方向星基增強SPP定位誤差比基本導航SPP更加平穩,波動較小。在U方向星基增強SPP定位精度整體優于基本導航SPP。對實驗解算結果剔除3倍中誤差統計后,得到3個方向的RMS值,如表2所示。

表2 北斗星基增強與偽距定位精度 單位:m
由表2所示基本導航SPP在水平方向精度優于1.5 m,高程方向優于3.3 m。北斗星基增強SPP定位水平方向定位精度優于1 m,高程方向優于1.5 m。通過三維方向精度比較可以看出,北斗星基增強SPP較基本導航SPP精度提升約48.3%。由《架空輸電線路無人機巡檢作業技術導則》標準規定大中小型無人機距離線路設備安全距離分別為50,30,10 m[14],由此可見使用星基增強定位技術完全滿足行業標準,且較單頻偽距定位精度更高。
4 結束語
本文設計了一種基于北斗星基增強的無人機自動巡檢系統,通過北斗星基增強接收機仿無人機動態定位實驗,比較分析星基增強SPP和基本導航SPP在E,N,U三個方向的定位精度。實驗結果表明:北斗星基增強SPP整體定位精度較較基本導航SPP提升48.3%,滿足無人機在電力線路巡檢方面定位精度要求。隨著星基增強技術的不斷完善和發展,基于星基增強系統的電力巡檢技術將在未來不斷發揮價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34