基于SLAM移動測量技術的逆向建筑模型獲取
2022-01-21 06:15:18謝孔振
北京測繪 2021年12期
謝孔振
(1.北京市測繪設計研究院, 北京 100038; 2.城市空間信息工程北京市重點實驗室, 北京 100038)
0 引言
近年來,隨著北京市老城保護、歷史文化保護區房屋修繕、背街小巷整治、城市環境景觀提升的推進,尤其是不久前《首都功能核心區控制性詳細規劃(街區層面)(2018—2035年)》的發布,在首都對于保護老城整體格局、加大文物與歷史建筑保護力度,且鼓勵開放與適度利用相結合的規劃理念指導下,需要對一些歷史建筑進行保護性修繕、加固、外立面美化改造。但由于建成年代久遠等歷史原因,這些建筑原設計圖紙往往早已滅失,設計單位亟須對建筑的現狀進行精準測繪,恢復建筑平面圖、立面圖、剖面圖、結構圖紙,這種測繪實現方式稱為逆向工程(Reverse Engineering,RE)測繪。測繪目的是在所恢復的建筑平立剖面圖基礎上進行結構加固、內部裝修、外立面改造等設計,甚至可以為設計、施工過程提供全景影像視圖、三維點云數據、建筑信息建模(Building Information Modeling,BIM)模型等。傳統的古建筑測繪大都采用人工作業的方法,一般通過全站儀和普通鋼尺來測繪建筑物的平面、立面和剖面圖[1],這種方法獲取數據單一,對實體的反映形式簡單單調,且傳統方法投入人員多、工作量大、作業效率低,在遇到復雜建筑物時難以滿足測繪要求[2]。因此,這種對建筑物室內外的精細化、可視化的測繪需求給傳統測繪方式帶來了不小的挑戰。
1 三維數據采集與SLAM技術的結合
1.1 批量化三維數據采集手段
測繪地理信息行業作為當前新興的戰略產業,可以為大量上下游行業的發展提供強大的空間大數據支撐。隨著光學、電子、傳感器、計算機等技術的發展,基于激光掃描的三維技術成為當前空間數據獲取的重要手段。三維激光掃描是數字化、信息化測繪階段的代表技術,不同于常規的測繪數據獲取方法,常規測量獲取到的往往是單一的、二維的信息,很難大規模獲取三維空間信息。而三維激光掃描技術以其特有的技術優勢可以快速、直觀、有效地將所在環境的三維信息實現數字化、可視化、仿真化。它克服了傳統測量手段效率低、勞動強度大、采集速度慢的局限性,具有采樣率高、精度高、受外界影響小、非接觸測量等特點[3],能夠對任意物體進行掃描,且不受天氣影響,可以不分晝夜地完成各類測量任務[4],其信息量豐富、可視化強、便于使用。隨著現代社會對信息化程度及大數據需求的提高,特別是很多城市提出了數字城市、智慧城市等概念后,市場對空間三維信息的需求更加迫切。
20世紀90年代中期,以三維激光掃描為代表的激光雷達測量系統應運而生,它是當前三維空間數據采集應用最為廣泛、技術最為成熟的測量系統,三維激光掃描技術是一項通過非接觸式高速激光掃描測量,以陣列式點云的形式獲取物體表面三維空間數據的新技術[5]。隨著三維激光掃描測量系統在測量速度、測繪精度、抗干擾能力等各方面性能的提升,它逐漸成了測繪地理信息行業研究的熱點,應用領域不斷擴展,逐步成為快速獲取空間實體三維數據的重要方式之一。
1.2 SLAM在激光掃描技術中的應用
SLAM技術無須全球導航衛星系統(Global Navigation Satellite System,GNSS)信號,在封閉空間能夠實現快速準確定位,在地下空間與建模中應用廣泛[6]。在運動過程中,機器人通過激光雷達(Light Detection And Ranging, LiDAR)傳感器或相機測定自身的姿態、位置以及運動軌跡,并且可以在運動過程中進行增量式的地圖構建,從而達到實時定位和地圖構建的目的。因此,SLAM技術解決了機器人“我在哪里”(在陌生的空間環境中如何準確判定自身位置)與“我周圍的環境是什么”(Mapping即地圖構建)的問題。它可以利用機器人自身搭載的傳感器觀測到的空間數據來增量式地構建建筑物的 3D 模型,同時利用構建出來的環境模型來計算出機器人的位置與姿態。
近年來,地面三維激光掃描儀已較多地應用于測繪領域。2007—2010年,法國Julien Travelletti 等[7]利用遠距離地面式激光掃描儀連續3年對Super-Sauze滑坡體進行了數據采集,并從點云時間序列中提取相關有用信息;Rongjun Qin等[8]研究了三維激光掃描技術應用于街面變化監測;2011年,俄羅斯測繪工作者開始對莫斯科城市標志性建筑 Shukhov 無線電塔進行了三維激光掃描及3D建模。所用到的這些設備均為地面型固定式三維激光掃描系統,但基于SLAM移動測量技術的掃描系統應用尚少。推車式SLAM移動測量技術則是將SLAM技術與三維激光掃描技術相結合,使用推車式移動測量設備上搭載的LiDAR傳感器,實現三維空間數據的高效與全方位采集。它能夠應用于室內及地下沒有被GPS信號覆蓋的環境中,進行點云掃描,從而實現三維建模。在推車式SLAM移動測量技術克服了地形環境的限制后,被廣泛地應用于室內空間數字化、房產測繪、室內地圖、工廠改造、場館改造、街區改造、地理信息系統融合建筑信息建模(Geographic Information System+Building Information Modeling,GIS+BIM)、會展等領域。這種基于SLAM的空間三維數據獲取技術,同時擁有激光掃描和移動測量兩種技術的優點[9],作為目前測繪界最先進的三維空間數據采集手段之一,它的成熟應用將會極大地減少測繪工作者的外業工作量,也代表著今后測繪地理信息行業在數據采集方面的一個應用發展方向。
本文通過案例,對推車式SLAM移動測量技術在建筑逆向測繪中進行應用嘗試,對其數據采集精度進行分析,并提出提高數據采集及后處理精度的方法。
2 應用案例
什剎海環湖地區景觀提升項目測繪項目為西城區重點項目,旨在對環什剎海歷史文化保護區進行保護性修繕。除測繪環湖周邊地形圖外,重點對荷花市場、什剎海會館以及小王府(圖1)等所有古建及仿古建筑進行平面、立面、剖面測繪,為設計提供詳細的建筑圖紙,并提供全景影像視圖、三維點云數據,供設計使用以便于今后對建筑進行保護改造。

圖1 項目范圍
2.1 使用設備介紹
本項目數據采集所使用的設備是德國NavVis公司生產的S365推車式SLAM移動測量系統(圖2),它擁有6臺1 600萬像素的相機、3臺LiDAR掃描頭,最大測距30 m,標稱掃描精度0~30 mm。具體指標如表1所示。

圖2 S365測量系統
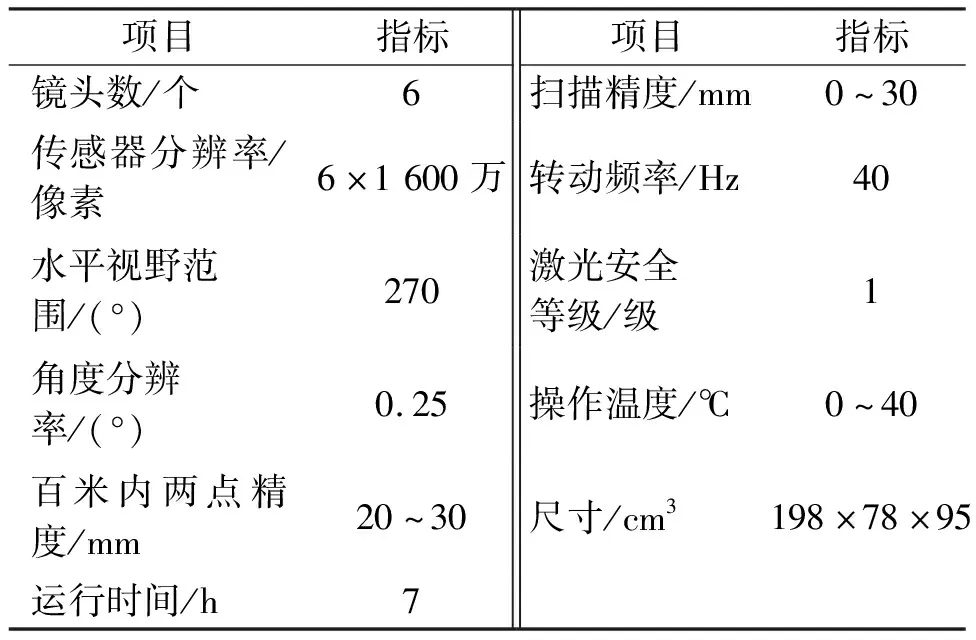
表1 S365精度指標
2.2 作業流程
作業流程如圖3所示。首先按照設計要求進行技術方案設計,并于第一時間組織了現場踏勘,通過了解現場標的詳細情況,以便確定推掃方案及錨點位置選設。
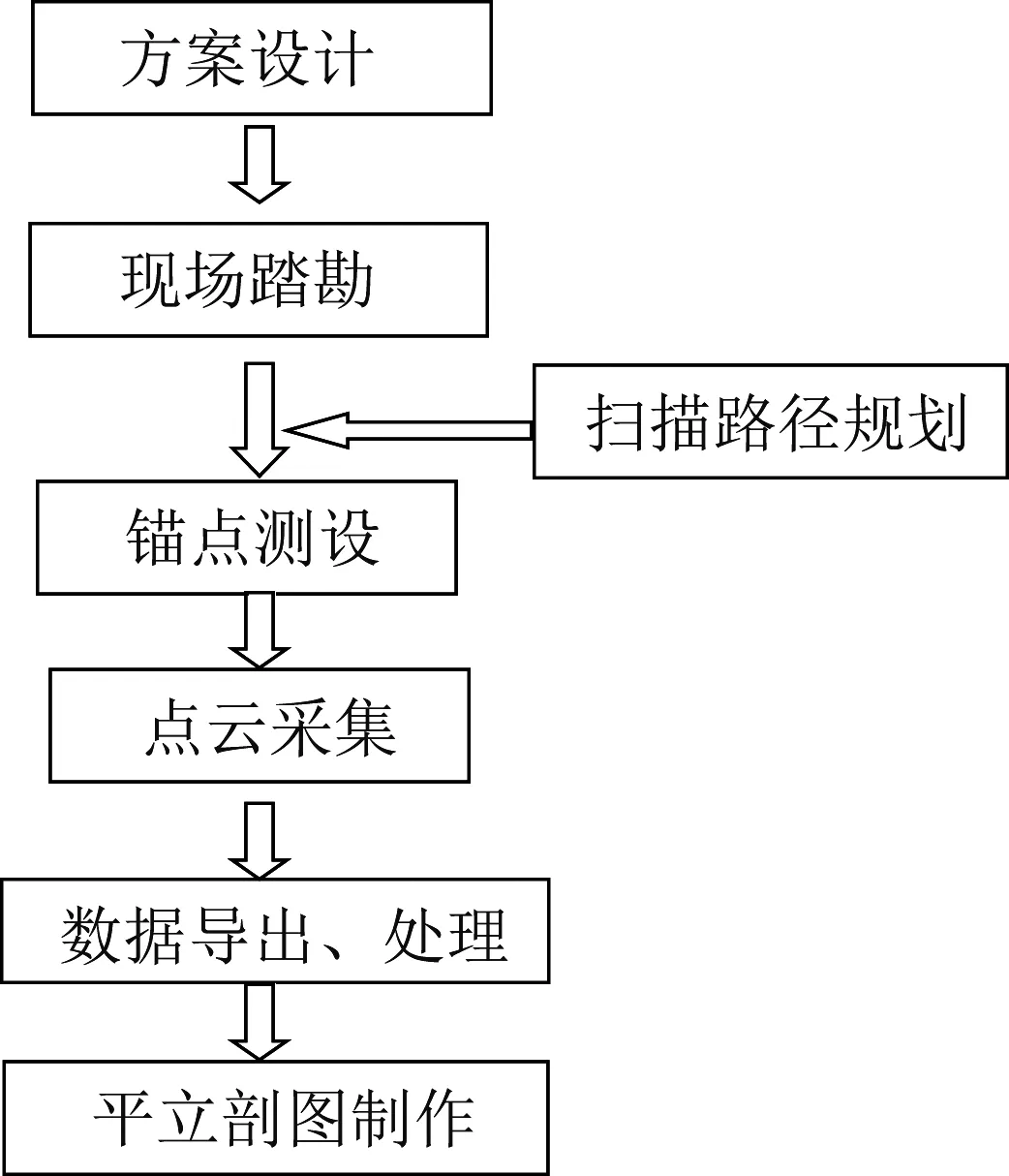
圖3 作業流程圖
2.3 路徑規劃
根據踏勘情況,分別對荷花市場、小王府、什剎海會館的外部及室內進行推掃路徑規劃,具備條件的區域盡量設置成閉環路徑,不能形成閉環路徑的,注意在局部區域設置重疊或交叉路徑。
2.4 錨點測設
現場沿規劃路徑每隔30 m左右布設錨點,室外用鋼釘及紅色油漆標記,室內采用錨點貼紙。利用北京市連續運行參考站系統,采用RTK 方式配合全站儀進行測設。
當然,并非所有錨點必需測定絕對坐標,部分測定坐標的錨點在后處理階段參與數據重建,可以將點云數據定位至絕對位置;沒有測定坐標的錨點作用也很重要,當SLAM移動測量系統重復經過該錨點時,2次或多次采集到的數據將用于重算整合并用以提高點云精度。至于按照多大的密度測設錨點坐標,這需要在目標測繪精度與布設并測量錨點所花費的時間成本之間進行權衡。
2.4.1實時差分定位(GPS-RTK)測量
錨點宜選擇在掃描路線上觀測條件良好的地方,觀測時應滿足下列要求:位置精度因子(Position Dilution of Precision,PDOP)小于6;衛星高度截止角大于15°;有效的觀測衛星數不少于5顆;實時差分定位(Global Positioning System-Real Time Kinematic,GPS-RTK)測量,應進行不少于2個測回獨立觀測;記錄的觀測數據應是GPS-RTK觀測值的固定解,固定解應是穩定收斂至毫米級精度后開始定位觀測、記錄并存儲;測回間的平面坐標分量較差不應超過2 cm,應取各測回結果的平均值作為最終觀測成果。
2.4.2導線測量
根據現場的情況,對于不利于開展GPS-RTK測量的地方,在場區內采用三級導線測量方法測定錨點坐標,觀測時,宜采用2″級的儀器一測回測定水平角。三級導線測量的主要技術要求如表2所示。
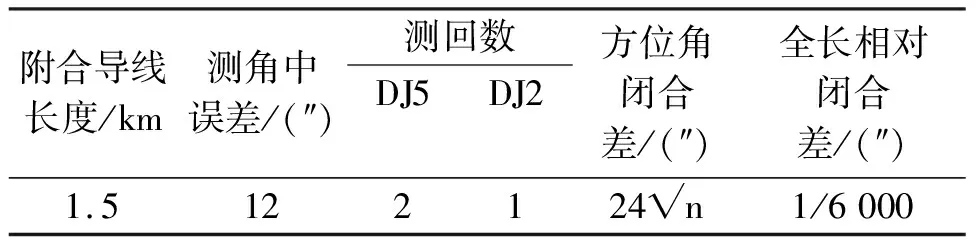
表2 三級導線或導線網的技術要求
導線測量時應滿足如下要求:導線宜布設成直伸等邊形狀。導線網中結點與高級點間或結點與結點間的導線長度不應大于附合導線規定長度的0.7倍。
附合導線長度短于上表規定長度的1/3時,導線全長的絕對閉合差不應大于130 mm。
2.5 數據采集及需要注意的問題
按照預先規劃的路徑對荷花市場、小王府、什剎海會館分別進行數據采集,室內空間掃描時注意與室外路徑的錨點相結合,對于大型(較長)數據集采集時段,注意定期重新掃描已經掃描過的區域,這樣可以減少漂移誤差并創建更準確的掃描數據。其原理是當移動推車掃描系統經過其先前的路徑時,該軟件將會自動“識別”先前采集到的地圖環境,并調整采集數據,減少推車掃描系統自首次通過該區域以來發生的漂移誤差。
推掃過程中,相機每隔一段時間在即將觸發拍照前會發出提示音,這時需要將推車式SLAM移動測量系統暫時停止推進,使得采集到的照片保持較高的清晰度,便于后期生成高質量的全景影像視圖。
經過錨點時,按動錨定位按鈕,儀器發出十字紅外線,移動掃描設備,使得十字紅外線對準錨點,按動設置錨點按鈕,輸入錨點編號,點擊確認,這樣則形成錨點文件,用于后期數據處理。
每個掃描時段結束即形成一個數據集(Dataset),需要注意的是,為了每個數據集的拼接精度,相鄰數據集之間至少要共用2個錨點。
掃描完成后,通過掃描設備的IndoorViewer軟件可以查看數據集中的圖像信息及掃描質量。
2.6 數據處理
2.6.1數據導出
將設備的ssd磁盤驅動器或將設備通過網絡連接到計算機,即可導出掃描數據。
2.6.2數據處理
利用SiteMaker軟件將所采集的數據轉換為點云、地圖、全景影像。因為掃描設備在數據采集階段采樣率為5 mm,數據量很大,巨大的數據量在處理時需要大量的時間成本。因此,需要統籌考慮項目所需精度及數據量,對點云進行抽隙處理。本項目設置10 mm的分辨率,是考慮到較快處理速度與高點云分辨率。
處理點云時有三種模式:銳利邊緣(Sharp_Edges)模式、平衡(Balanced)模式、平滑表面(Smooth Surfaces)模式。因本項目需要提取建筑平立剖面圖,為保證邊緣清晰,所以選擇Sharp_Edges模式,使得處理后的點云有比較清晰的邊緣,便于后續平立剖面圖繪制。
選擇使用SLAM錨文件,處理過程中,軟件通過算法對點云著色、全景拼接,并使用錨文件坐標進行數據重建。
值得注意的是,數據采集過程中,有可能因操作員身高對部分目標對象產生遮擋,那么在數據處理時進行消除操作員遮蔽操作。反之,如果確定操作員沒有產生任何遮蔽,則可以取消“使用操作員遮罩”設置。
動態對象濾除功能:掃描過程中,附近經過的人或其他物體也會在采集到的數據中產生偽像,通過動態對象濾除可以消除這些偽像,以便獲得更加清晰的點云。濾除前后對比圖見圖4。

圖4 動態對象濾除對比圖
經過以上數據處理后,生成了2D平面圖、質量圖、點云數據、全景影像等,供后續使用。
2.6.3繪制平立剖面圖
利用所生成的點云數據結合實景影像,很容易判斷建筑物輪廓,在CAD軟件環境下即可以繪制任意需要的平面圖、立面圖、剖面圖及細部結構圖(圖5)。

圖5 點云(a)及圖件(b)
2.6.4精度分析
在繪制完成的建筑平面圖中,任意選取8條邊長進行誤差分析(表2),量取邊長di,通過全站儀雙極坐標法串測所選取邊長的房角坐標,量取邊長Di,
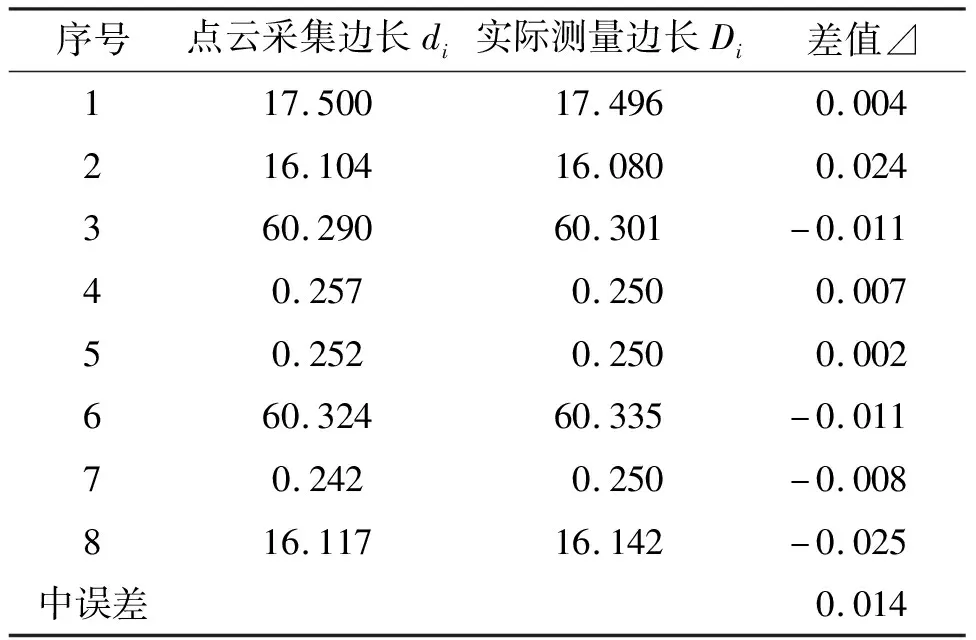
表2 誤差分析表 單位:m
邊長真誤差⊿i=di-Di
3 提高數據獲取精度方法分析
3.1 保持正確的推行姿態
數據采集時,使得SLAM移動測量系統運行姿態平穩,在轉彎時應緩慢,不能猛拐。當相機拍照提示音響起時,應使SLAM移動測量系統處于停止狀態。這樣,可以獲得高質量的點云及影像數據。
3.2 需要適當的光亮度
雖然激光雷達對光照度沒有要求,但是為了后期處理時生成的全景影像的清晰度,仍然要求在數據采集時有適當的光照度,以保證六臺相機能獲得清晰的照片。
3.3 規劃閉環路線使得數據自我糾正
當移動掃描系統經過其先前的路徑時,系統將“識別”已掃描過的地圖環境,它將對掃描數據進行糾正,以減少漂移誤差。因此,推掃過程中的路線規劃應該盡可能選擇閉環路線。
3.4 利用錨點提高相對精度及絕對精度
另一個提高地圖準確性的有效方法是SLAM錨點的利用。通過錨點坐標文件參與結算,在后處理時可以對漂移的點云數據進行糾正,以便提高掃描對象的絕對精度。
方法是每25 m左右、在路線拐點、室內通道盡頭盡量均勻布設錨點。
4 結束語
推車式三維激光掃描系統實現了SLAM技術與三維激光掃描技術的融合,利用它可以實現對建筑物的連續性、批量式點云數據采集,同時可以實現實景影像獲取,為逆向工程設計所需要的各種、各部位平立剖面、結構圖、實景影像、三維模型的實現提供了解決方案。本文結合具體案例對這種數據采集及數據處理方法進行了闡述,分析了提高數據精度的方法,并與傳統測量模式結果進行比對及精度分析,證明這種基于SLAM移動測量技術的數據采集方式是逆向建筑模型獲取的可靠手段,將其應用于復雜、不規則的古建筑中具有無可比擬的優勢[10]。然而,相對于地面型三維激光掃描系統而言,推車式三維激光掃描系統也有一定的局限性,其掃描距離較短,對于高層建筑立面測繪難以實現,為了保證精度需要提前布設較多的錨點。但是瑕不掩瑜,相信隨著激光掃描頭性能的提升以及后處理軟件功能的不斷完善,其必將具有廣闊的應用前景[11]。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
江西建材(2018年4期)2018-04-10 12:37:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21