多種智能測量設備在水庫水下地形測量中的聯(lián)合運用探究
2022-01-22 07:48:34卓鎮(zhèn)權(quán)
城市建設理論研究(電子版) 2021年25期
卓鎮(zhèn)權(quán)
廣東省有色地質(zhì)環(huán)境中心 廣東 廣州 510080
水庫自身的地形環(huán)境相當復雜,加上水位會不斷發(fā)生變化,這使得淺灘、沼澤等地形不斷形成,這對于獲得水庫下方的三維地形數(shù)據(jù)來說是非常困難的。由于水庫水下地形測量需要借助船只,而大船的吃水量較大,難以讓測量人員攜帶相應的儀器和設備到達淺水沼澤區(qū)域附近,此外,使用人工測量的精度也比較低,效率差,還伴隨著很多的危險,面對小區(qū)域內(nèi)的泥濘區(qū)域還可以采用人工插值的方式,但是想要獲得大范圍內(nèi)的水下地形數(shù)據(jù),就需要進行一定密度的實測,這樣工作量非常大,并且伴隨了很多的危險。使用記載藍綠光雷達能夠快速高效的完成淺水地區(qū)的數(shù)據(jù)采集,但是由于成本過高,難以大范圍普及儀器的應用,并且淺水區(qū)和沼澤區(qū)的面積只占水庫的一小部分,投入和回報不成正比。
隨著近些年基礎(chǔ)科學技術(shù)的發(fā)展,無人測量船以及無人機技術(shù)得到了更廣泛的應用,通過使用無人機無人船配合的方式,能夠有效解決大船吃水深的問題,并且無人機成本很低,操作非常方便,能夠很好地對空間進行分辨,在測量沼澤區(qū)的時候,能夠提高測量的精度,降低測量人員的危險。
1 水庫水下地形測量儀器準備
完成水庫中淺灘水域以及沼澤區(qū)域的測量工作,需要準備多波束測深儀、智能無人測量船以及旋翼無人機。多波束測深儀是一種集成設備,它能夠發(fā)射和接受信號,同時還搭載了姿態(tài)儀和表面聲速儀,具有體積小、操作方便、安裝快捷的優(yōu)勢,能夠快速的將水下地形的三維點云數(shù)據(jù)進行收集,該儀器最大工作深度可以達到300m,有效工作深度達到75m,能夠很好地滿足淺水區(qū)域的測量。智能無人測量船以測量船為載體,搭載了測深系統(tǒng)、導航定位系統(tǒng)、無線通信系統(tǒng)、推進系統(tǒng),能夠快速自動的將水下三維數(shù)據(jù)進行匯總,并且由于船體尺寸較少,重量輕,操作和運輸都非常方便,在淺水區(qū)測量能夠發(fā)揮出很大的作用。無人機中具有控制系統(tǒng)、動力系統(tǒng)以及數(shù)據(jù)鏈路系統(tǒng),能夠?qū)崿F(xiàn)輔助測量的作用。
2 水下地形測量
2.1 技術(shù)路線
庫區(qū)測量范圍的最外圍范圍線是水庫大壩頂部,高程所在的等高線,測量主要分為陸域地形測量以及水下地形測量。
進行陸域測量的時候使用,豐水期時候可以采用無人機航空拍攝完成攝影工作,實現(xiàn)對測量數(shù)據(jù)的采集,在枯水期的時候就需要把水位下降形成的陸域空白區(qū)域以及沼澤區(qū)域使用旋翼無人機再次進行測量。
對于水域地形測量,可以采用多波束測深系統(tǒng)完成對深水區(qū)的測量,對于淺水區(qū)則使用無人測量船進行測量,二者測量完成后將數(shù)據(jù)進行結(jié)合,將深水測量和淺水測量的邊界進行拼接得出完整的測量數(shù)據(jù),整個技術(shù)流程如圖1所示。
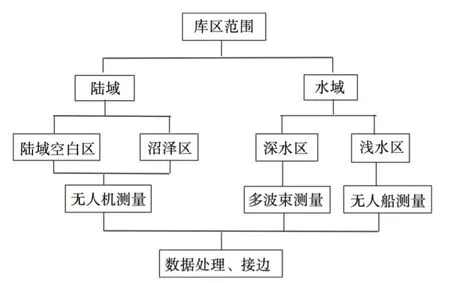
圖1 技術(shù)流程
2.2 采用無人機對陸域沼澤區(qū)域進行測量
水庫高水位地區(qū)在枯水期會形成沼澤灘涂,測量人員很難進入該區(qū)域,通常區(qū)域內(nèi)還會生長低矮的灌木和草地。規(guī)定測圖比例尺為1:2000,無人機飛行過程中應該始終保持飛行高度一致,控制高度在200m,同時還應該對航拍路線進行規(guī)劃設計,使得航線重疊率能夠保持在65%以上,旁向重疊率保證在50%以上。無人機飛行路線應該根據(jù)沼澤灘涂區(qū)域的地勢地形來決定,飛行路徑應該和水流流域相垂直,采用折線矩形的“己”字型飛行方式,保證測區(qū)能夠被完全覆蓋[1]。利用RTK連接上LNCORS系統(tǒng),將測區(qū)內(nèi)的像控點和檢查點進行均勻的散布。在水涯線區(qū)域進行航拍的時候,應該使用RTK對水涯線的高程進行實時測量。
在測量之前應該做好儀器設備的準備工作。首先應該保證無人機的電池電量能夠滿足測量需求,其次是檢查地面站的系統(tǒng)電量是否充足,做好地面站所使用的軟件的檢查。無人機飛行盡可能選擇地勢相對平坦,具有平坦鋪裝材料的場地作為無人機的起降場,保證起降場地和任務區(qū)之間距離不超過一公里。
在地面站和無人機組裝調(diào)試結(jié)束后就可以開始進行航攝工作,如果電臺設置在地形較高的位置,應該根據(jù)沼澤灘涂區(qū)的實際情況,確定起飛路線以及測量路線,在無人機起飛之后,將地面站的系統(tǒng)啟動,通過通信連接和GPS連接,讓無人機能夠?qū)崿F(xiàn)信號傳輸,實施無誤后即可開始沿線飛行完成拍攝工作。
2.3 多波束測深系統(tǒng)測量深水區(qū)水下地形
在使用多波束測深系統(tǒng)之前,需要先完成對系統(tǒng)的校準和測量,同時還應該選擇合適的測量時間,以風力較小、水面流速較慢的時間測量為宜。校準儀器有規(guī)定的順序,首先應該完成對橫搖偏差和縱搖偏差的校正,隨后完成艏向偏差,在校正下一個參數(shù)之前,應該先完成對上一項參數(shù)的輸入工作,排除校正時候被其他因素所干擾[2]。時間延遲偏差由生產(chǎn)商制定,直接輸入數(shù)據(jù)即可。按照規(guī)范的要求,每一組數(shù)據(jù)都需要進行三遍以上的校準,多次校準的結(jié)果誤差都應該滿足規(guī)范的要求。
在天氣情況良好的時間進行水下地形的測量工作,能夠保證船速平穩(wěn),控制在合理的范圍內(nèi)。主測線方向應該和水流方向一致,測量路線依然采用“己”字形測量方式,每一條主航線都應該至少覆蓋上一條航線15%以上的區(qū)域,這樣能夠確保水下地形能夠被全覆蓋的測量,還能夠讓邊緣波束測量的精度提升。在使用多波束測量系統(tǒng)進行測量的過程中,還應該配合應用水砣,實時檢測水庫的深度,同時還要均勻的布設不小于測繪面積5%的檢測線路,檢測線的方向應該和水流方向相垂直,通過檢測能夠確保水下地形檢測的精度得到保障。
2.4 無人測量船測量淺水區(qū)域水下地形
無人船測量淺水區(qū)域的時候?qū)μ鞖庖灿幸螅M可能在水面波動小,風力較小的天氣下完成測量工作,理論上測量時當?shù)仫L力不應該大于四級,如果超過了四級風,應該立即停止作業(yè),將無人船進行回收。無人船測量淺水區(qū)域的時候,主測線應該和河岸的方向保持垂直,測線間的間距控制為15m,定位點之間的間距設置為5m。使用無人測量船進行測量的測區(qū)需要和多波束測深系統(tǒng)的測量區(qū)內(nèi)至少有兩個重合點,保證測量更加準確[3]。無人測量船的檢測線長度不得小于測量總長度的5%,方向和主測線相互垂直。
在測量開始之前,應該將無人測量船上的通信系統(tǒng)和基站進行連接,把GPS系統(tǒng)和LNCORS系統(tǒng)連接起來,在確定通信系統(tǒng)和GPS系統(tǒng)連接正常之后,就可以開始測量工作。這時候需要把已經(jīng)設置好的測深線導入軟件之中,使用自動導航測量和手動遙控測量相結(jié)合的方式,完成對淺水區(qū)域的水下地形測量。
3 水下地形測量過程中遇到的困難與解決辦法
3.1 水下勘測定位不準,航線易偏
水下測量最常遇到的問題就是勘測船難以在水面上找到適當?shù)膮⒄瘴铮@時就需要使用RTK完成對勘測船只的全程實時定位導航。在水面非常廣闊的時候,如果沒有導航技術(shù),就非常容易出現(xiàn)勘測船偏移航線的情況,難以保證航線始終是一條直線。想要解決這一問題就應該在勘測之前,在水庫岸邊設置可見的參照物,讓勘測船能夠按照向著參照物進行前進,這能夠有效的保證勘測船檢測的有效性。同時如果發(fā)現(xiàn)了勘測船偏離了航線,不應該大幅度的猛烈校準,應該保持小幅度的修正,使得航行路線能夠平滑,達到測量的目標。
3.2 RTK實測數(shù)據(jù)和測深儀測深數(shù)據(jù)難以匹配
在實際進行操作的時候,水庫的水面不會是平靜的,而是會上下起伏,這就會讓測量水深和真實值之間存在著誤差,因此在測量水深的同時,還應該使用輔助測量設備進行同時測量,例如水砣、測深尺和探測桿等。可以將其和GPS連接在一起,保證二者相對位置不變,當出現(xiàn)風浪的時候,測深儀獲得的水深數(shù)據(jù)就會發(fā)生變化,GPS的高程數(shù)值也會同步發(fā)生變化。
4 結(jié)束語
在大比例尺下進行水下地形的測量,需要靈活的應用多種智能測量設備,這樣才能保證測量的準確性、易用性和安全性。使用多波束測深系統(tǒng)檢測深水區(qū)域的效率較高,精確度得到了保證,使用無人測量船進行淺水區(qū)域的測量解決了淺水區(qū)域測量船只難以進入的問題,還提高了測量的安全性,使用無人機航拍可以將水庫邊緣的沼澤地形進行測量,三種方式相結(jié)合即可完成對水庫水下地形的全覆蓋測量,并且測量精度能夠得到保障。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21