交替測量式掘進機定位系統誤差建模與分析
2022-01-25 02:25:00李志海劉治翔謝苗李玉岐王帥
工礦自動化 2022年1期
關鍵詞:測量
李志海, 劉治翔, 謝苗, 李玉岐, 王帥
(1.山西西山晉興能源有限責任公司, 山西 呂梁 033600; 2.遼寧工程技術大學 遼寧省高等學校礦產資源開發利用技術及裝備研究院, 遼寧 阜新 123000)
0 引言
掘進機在煤礦井下巷道中的絕對位置直接影響掘進機軌跡誤差,間接影響巷道成形質量及其穩定性、安全性,因此掘進機在復雜狹長巷道中的精確定位和自主導航是實現智能掘進的關鍵技術之一[1-2]。根據定位裝置的載體形式不同,目前煤礦掘進機定位技術可分為定點測量式、慣性導航式、交替測量式3類。
定點測量式定位技術是目前應用最廣泛、技術最成熟的煤礦掘進機定位技術。其將激光指向儀、全站儀、礦用高清攝像機等設備安裝在巷道固定地點獲取掘進機位置信息,通常可在100~200 m范圍內實現掘進機定位。如文獻[3-4]介紹了基于標靶指向的掘進機定向方法,依據綜掘巷道設計的中心軸線,在巷道后方安裝激光指向儀,通過識別激光指向儀發出的激光標靶實現掘進機定位。
慣性導航式定位技術采用慣性測量元件(包括三軸陀螺儀和加速度計)測量運載體位姿。三軸陀螺儀可實時測量運載體在三軸方向上的運動角速度;加速度計通過實時測量運載體在三軸方向上的力,得出運載體在三軸方向上的運動加速度,結合初始位姿信息實時確定運載體位姿。慣性導航式定位技術的優勢是其獨立成為一個系統,不易受外界干擾[5-6]。但由于掘進機移動緩慢、停頓時間長,且工作過程中極易出現側滑、橫擺、甩尾等欠約束情況,所以采用該定位技術時,掘進機空間位置解算誤差較大。文獻[7]研究表明,慣性導航式定位技術在無標定信號條件下,測量時間為20 s 時,其空間位置解算最大誤差達87 m,遠不能滿足懸臂式掘進機對定位精度的要求。
交替測量式定位技術是近年來我國專家學者提出的新型掘進機定位技術。文獻[8]提出使用UWB(Ultra Wide Band,超寬帶)定位模塊對掘進機上的多個模塊進行定位,再通過位置關系解算出掘進機的姿態角和位置。文獻[9]提出使用基于空間交匯測量原理的激光測距系統對掘進機位姿進行測量,測試結果表明該系統在25 m距離下存在0.082 3 m的X軸定位誤差。文獻[10]提出基于iGPS技術對掘進機位姿參數進行測量,測試結果表明該技術在17 m距離下存在10 cm的Y軸定位誤差及不超過2 cm的X,Z軸定位誤差。文獻[11]提出了基于圖像識別標靶技術的掘進機定位方法,測量范圍為2~100 m,且測量誤差不超過20 mm。上述研究成果采用的測量技術不同,但均采用了一個跟隨掘進機自主移動的測量平臺,由測量平臺測量掘進機位置,平臺隨掘進機移動后,再由掘進機反向檢測平臺位置,實現掘進機和測量平臺的位置交替測量。
交替測量式定位技術易于實現掘進機位置自主測量,人工干預小,測量精度高,未來有可能發展為掘進機器人定位的主流技術。但該技術基于多次交替測量原理,勢必產生累計測量誤差。目前專家學者主要圍繞單次測量的誤差產生原因、誤差分布規律及誤差減小方法進行研究,還沒有針對多次交替測量誤差分布規律的研究成果。本文通過建立交替測量式掘進機定位系統誤差模型,研究多次交替測量誤差分布規律,為掘進機自主定位和自主移動導航提供理論基礎。
1 交替測量式掘進機定位系統原理
掘進機是煤礦井下掘進巷道的主要機械設備,其截割巷道的輪廓在礦井設計之初就已完成規劃。掘進機需要根據預先設定的軌跡和形狀進行截割。以規劃的巷道起始位置截面底部中心為原點OT,巷道走向方向為XT軸(與巷道底部中心線重合,并指向掘進前方),巷道軸向方向為YT軸,建立巷道平面坐標系。為了實現巷道精確截割成形及截割誤差補償控制,掘進機在巷道中的移動軌跡經常是沿YT軸方向的往復折線,且折線相對于YT軸的角度是隨機的。而交替測量式掘進機定位系統中測量平臺并不跟隨掘進機做相同的折線運動。系統工作原理如圖1所示。掘進機和測量平臺交替移動,其定位信息交替測量:測量平臺先測量掘進機位置,之后測量平臺向前移動1步,掘進機對測量平臺進行定位,重新標定測量平臺在巷道中的位置;掘進機向前移動1步,測量平臺再次測量掘進機位置。重復上述步驟,實現交替測量式掘進機定位。

圖1 交替測量式掘進機定位系統工作原理Fig.1 Working principle of alternating measurement mode roadheader positioning system
2 交替測量式掘進機定位系統誤差模型
2.1 坐標系定義
掘進機定位數據是基于其自身坐標系得到的。為了通過掘進機定位數據確定掘進機在巷道空間的位置,指導掘進機自動巡航作業,需要將掘進機位置數據轉換到巷道坐標系中。該轉換過程需要建立掘進機車體坐標系、測量平臺坐標系和巷道坐標系的變換關系。3種坐標系定義如圖2所示。

圖2 坐標系定義Fig.2 Coordinate systems definition
OVXVYVZV為掘進機車體坐標系,用于描述掘進機與巷道坐標系的位置關系。XV軸設定為與掘進機底部中心線重合,并指向機身前方;ZV軸設定為垂直于掘進機底板,并指向頂板;YV軸通過XV軸和ZV軸由右手定則確定。
OSXSYSZS為測量平臺坐標系,用于確定掘進機與測量平臺的位置關系,再由已知的巷道與測量平臺坐標關系,確定掘進機相對于巷道的位置坐標。XS軸設定為與測量平臺底部中心線重合,并指向機身前方;ZS軸設定為垂直于測量平臺底板,并指向頂板;YS軸通過XS軸和ZS軸由右手定則確定。
OTXTYTZT為巷道坐標系,用于進行掘進機定位及巷道斷面定位,通常設置在巷道的開切點。ZT軸設定為垂直于巷道底板,并指向頂板;YT軸通過XT軸和ZT軸由右手定則確定[12-13]。
2.2 掘進機定位過程分析
掘進機定位過程如圖3所示。OV0XV0YV0ZV0,OS0XS0YS0ZS0分別為掘進機車體和測量平臺初始坐標系;OVrXVrYVrZVr,OSrXSrYSrZSr(r=1,2,…,n,n為邁步次數)分別為掘進機車體和測量平臺邁步t次(即移動t個步長)后相應的坐標系。
掘進機定位過程如下。
(1) 初始條件下,測量平臺測量1次掘進機位置,并將其轉換到巷道坐標系中,得到掘進機絕對位置坐標。該步驟為過程①。
(2) 掘進機向前邁步1次,得到坐標系OV1XV1YV1ZV1,此時測量平臺不動,并測量1次掘進機位置。該步驟為過程②。
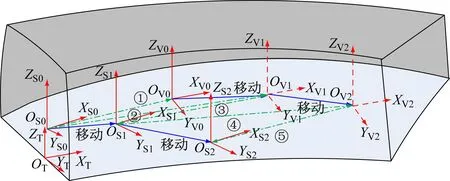
圖3 掘進機定位過程Fig.3 Positioning process of roadheader
(3) 掘進機位置保持不動,測量平臺向前邁步1次,得到坐標系OS1XS1YS1ZS1。此時掘進機測量測量平臺相對于掘進機的位置坐標,并通過坐標變換得到測量平臺相對于巷道空間的絕對位置坐標。該步驟為過程③。
重復上述步驟(如圖3中過程④,⑤),得到掘進機和測量平臺新的坐標系。
設初始時刻測量平臺坐標系在巷道坐標系中的坐標為(xS0,yS0,zS0)。掘進機邁步1次后,由測量平臺測得的其自身坐標系與掘進機車體坐標系的直線距離為d01,測量平臺、掘進機車體坐標系之間的連線與測量平臺坐標系中OSXSZS平面的夾角為α01、與OSXSYS平面的夾角為β01,通過幾何關系可得掘進機車體坐標系在巷道坐標系中的位置:

(1)
保持掘進機位置不動,測量平臺向前邁步1次,此時測得的測量平臺坐標系與掘進機車體坐標系的直線距離為d11,測量平臺、掘進機車體坐標系之間的連線與測量平臺坐標系中OSXSZS平面的夾角為α11、與OSXSYS平面的夾角為β11,通過幾何關系可得測量平臺坐標系在巷道坐標系中的位置:

(2)
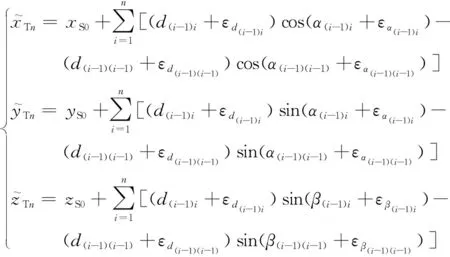
同理可得,掘進機邁步n次后,掘進機車體坐標系在巷道坐標系中的位置為

(3)
式中:d(i-1)i為掘進機邁步i次、測量平臺邁步i-1次后,測量平臺坐標系與掘進機車體坐標系的直線距離;α(i-1)i,β(i-1)i分別為掘進機邁步i次、測量平臺邁步i-1次后,測量平臺坐標系與掘進機車體坐標系之間連線與測量平臺坐標系中OSXSZS平面、OSXSYS平面的夾角;d(i-1)(i-1)為測量平臺、掘進機邁步i-1次后二者坐標系的直線距離;α(i-1)(i-1),β(i-1)(i-1)分別為掘進機、測量平臺邁步i-1次后,測量平臺坐標系與掘進機車體坐標系之間連線與測量平臺坐標系中OSXSZS平面、OSXSYS平面的夾角。
測量平臺邁步n次后,測量平臺坐標系在巷道坐標系中的位置為

(4)
2.3 定位誤差建模
由掘進機定位原理和過程可看出,由掘進機和測量平臺反復交替測量對方位置坐標,每次測量的誤差會累加到最終測量結果上,因此,每次很小的測量誤差最終都可能導致掘進機遠離預定軌跡。
多次交替移動和測量后,掘進機和測量平臺的真實位置和測量位置如圖4所示。可看出初次測量的誤差帶很小,但隨著交替移動和測量次數增加,定位誤差帶逐漸增大,因此需進行定位誤差建模,分析定位誤差變化規律,指導現場在何時何處及時進行系統重新標定,從而使誤差歸零。

圖4 不同測距誤差下掘進機和測量平臺的 真實位置和測量位置Fig.4 Real position and measuring position of roadheader and measuring platform under different ranging errors
通常測量傳感器的誤差是量程的百分之零點幾,因此設測距誤差εd=Fd,其中F為傳感器測量誤差,d為距離。設掘進機車體坐標系和測量平臺坐標系連線與測量平臺坐標系OSXSZS平面夾角α的測量誤差為εα、與OSXSYS平面夾角β的測量誤差為εβ。則式(3)和式(4)可改寫為
(5)

(6)

式(5)、式(6)即包含了測距誤差和角度測量誤差情況下,交替測量式掘進機定位系統數學模型,則系統定位誤差模型可表示為
(7)

通過式(7)可分析不同因素對掘進機定位誤差的影響。
2.4 定位誤差模型驗證

作圖法確定掘進機定位誤差原理如圖5所示。具體步驟如下。

圖5 作圖法確定掘進機定位誤差原理Fig.5 Principle of roadheader positioning error determined by graphic method
(1) 設定好掘進機所在坐標系OTXTYT,確定掘進機和測量平臺在坐標系內的初始位置(圖5中t0為掘進機初始位置,s0為測量平臺初始位置),以及掘進機步長、測量平臺步長等參數。
(2) 令掘進機邁步1次,將掘進機位置記作t1,并記錄t1坐標,將其作為掘進機真實位置。




假設推移步長為800 mm、角度測量誤差為0.2°(順時針為負、逆時針為正)、測距誤差為50 mm。記錄多次邁步后掘進機定位誤差,并與使用式(7)計算得到的定位誤差進行對比,結果見表1。可看出使用作圖法得到的結果與式(7)計算結果基本一致,存在的誤差為10-3數量級,主要是由作圖軟件測量精度導致。這說明使用式(7)分析不同因素對掘進機定位誤差的影響是可行的。因此下文在研究過程中所得的各種因素對定位誤差的影響規律均來源于式(7)計算結果。

表1 掘進機定位誤差對比Table 1 Comparison of positioning errors of roadheader
3 交替測量式掘進機定位系統誤差分析
通過交替測量式掘進機定位系統誤差模型研究角度測量誤差、測距誤差、推移步長、掘進機與測量平臺間距這4個參數對掘進機定位誤差的影響規律。
3.1 角度測量誤差對定位誤差的影響
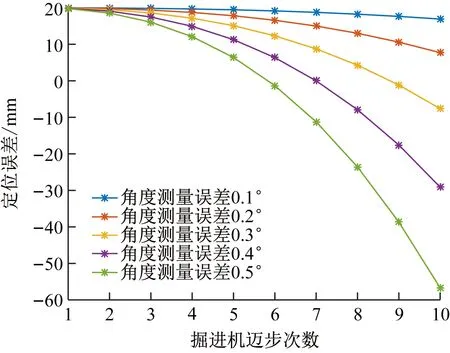
在不考慮測距誤差情況下,研究不同掘進機方位角度測量誤差對定位誤差的影響規律。分別設定角度測量誤差為0.1,0.2,0.3,0.4,0.5°,計算掘進機邁步10次后XT,YT軸定位誤差,結果如圖6所示。
(a) XT軸定位誤差

(b) YT軸定位誤差
從圖6可看出:隨著掘進機邁步次數增加,XT,YT軸定位誤差逐漸增大;角度測量誤差越大,定位誤差曲線曲率越大,即誤差增大越快;YT軸定位誤差增大速度遠大于XT軸。如果僅觀察掘進機的前5次邁步過程,XT軸定位誤差看似是逐漸減小的,實際上是向另一個方向逐漸增大。
在該情況下,假如煤礦現場工藝要求定位誤差不大于200 mm,那么在角度測量誤差為0.5°時,掘進機邁步僅3次后YT軸定位誤差就大于200 mm,即掘進機每邁步3次就需使用專用設備對掘進機位置進行1次校準;在角度測量誤差為0.4°時,掘進機邁步4次后YT軸定位誤差大于200 mm;在角度測量誤差為0.3°時,掘進機邁步5次后YT軸定位誤差大于200 mm;在角度測量誤差為0.1°時,掘進機邁步10次后YT軸定位誤差大于200 mm。
在上述研究基礎上,分別設定角度測量誤差為±0.1,±0.2,±0.3,±0.4,±0.5°交替變化,計算掘進機邁步10次后XT,YT軸定位誤差,結果如圖7所示。

(a) XT軸定位誤差

(b) YT軸定位誤差
對比圖7與圖6可看出,角度測量誤差為正負交替變化時的XT,YT軸定位誤差變化趨勢與角度測量誤差恒定時基本一致,但定位誤差曲線曲率小于角度測量誤差恒定時。因此可認為在無法消除角度測量誤差的情況下,可以減小測量誤差幅值,盡量讓測量誤差分布在0的兩側正負范圍內,避免固定在某一側范圍內。
3.2 測距誤差對定位誤差的影響
設定角度測量誤差為0.5°,分別令測距誤差為20,40,60,80,100 mm,研究不同測距誤差對定位誤差的影響規律。計算掘進機邁步10次后XT,YT軸定位誤差,結果如圖8所示。

(a) XT軸定位誤差

(b) YT軸定位誤差
從圖8可看出:測距誤差對XT軸定位誤差影響較大,測距誤差越小,初始XT軸定位誤差越小;不同測距誤差下的XT軸定位誤差曲線曲率基本一致,說明測距誤差主要影響XT軸定位誤差的初始值,不會影響其變化速度;測距誤差對YT軸定位誤差幾乎沒有影響,主要原因是交替測量過程中,YT軸定位誤差變化被抵消,這與實際經驗不符,主要是因為實際系統中的測距誤差不會一成不變。
3.3 推移步長對定位誤差的影響
設定角度測量誤差為0.5°,測距誤差為 60 mm,分別令推移步長為500,600,700,800,900 mm,研究不同推移步長對定位誤差的影響規律。計算掘進機邁步10次后XT,YT軸定位誤差,結果如圖9所示。
從圖9可看出,隨著推移步長增大,YT軸定位誤差曲線曲率增大,即YT軸定位誤差增大速度加快。這是因為在相同的角度測量誤差下,推移步長越大,角度對角邊越長,即定位誤差越大。為了減小定位誤差,可減小推移步長,增加測量次數。

(a) XT軸定位誤差

(b) YT軸定位誤差
3.4 掘進機與測量平臺間距對定位誤差的影響
設定角度測量誤差為0.2°,測距誤差為 20 mm,分別令掘進機與測量平臺間距為5 000,6 000,7 000,8 000,9 000 mm,研究不同掘進機與測量平臺間距對定位誤差的影響規律。計算掘進機邁步10次后XT,YT軸定位誤差,結果如圖10所示。
可看出圖9與圖10中掘進機定位誤差曲線趨勢基本一致,原因是不同的掘進機與測量平臺間距和不同的推移步長基本是等效的。
4 多因素正交試驗分析
掘進機定位誤差受多個參數綜合影響,上文研究了單一因素對掘進機定位誤差的影響規律,存在一定的局限性,因此選用正交試驗方法,綜合分析多因素對掘進機定位誤差的影響。設計4因素4水平的L16(44)正交試驗,試驗因素為角度測量誤差、測距誤差、推移步長和掘進機與測量平臺間距,分別設為A,B,C,D。根據常用參數和實際工況條件,選取的各因素各水平數值見表2。
根據式(7)計算正交試驗方案下掘進機定位誤差,結果見表3。

(a) XT軸定位誤差

(b) YT軸定位誤差

試驗水平A/(°)B/mmC/mmD/mm水平10.1205005 000水平20.2406006 000水平30.3607007 000水平40.4808008 000

表3 正交試驗結果Table 3 Results of orthogonal test
采用極差分析方法分析多因素綜合影響下各因素對掘進機XT,YT軸定位誤差的影響程度。極差反映了優化目標隨某因素變化而產生的變化幅度,變化幅度越大,表明該因素對優化目標的影響越大,即該因素越重要[14-15]。對掘進機XT,YT軸定位誤差進行極差分析,結果見表4、表5,其中Kj,kj(j=1,2,3,4)分別為影響因素A,B,C,D取水平j相應數值時定位誤差和及平均定位誤差。根據表4、表5可判斷掘進機XT,YT軸定位誤差影響因素的主次順序和優水平。

表4 XT軸定位誤差極差分析結果Table 4 Range analysis results of XT-axis positioning errors

表5 YT軸定位誤差極差分析結果Table 5 Range analysis results of YT-axis positioning errors
從表4可看出,掘進機XT軸定位誤差影響因素的主次順序為B,A,C/D,即測距誤差對XT軸定位誤差影響最大,其次為角度測量誤差,推移步長和掘進機與測量平臺間距影響最小且二者影響程度一致。工程要求XT軸定位誤差盡量小,可確定以XT軸定位誤差為目標的優組合為A=0.4°,B=20 mm,C=600 mm,D=8 000 mm。
從表5可看出,掘進機YT軸定位誤差影響因素的主次順序為A,C/D,B,即角度測量誤差對YT軸定位誤差影響最大,其次為推移步長和掘進機與測量平臺間距且二者影響程度一致,測距誤差影響最小。工程要求YT軸定位誤差盡量小,可確定以YT軸定位誤差為目標的優組合為A=0.1°,B=40 mm,C=500 mm,D=6 000 mm。
5 結論
(1) 建立了交替測量式掘進機定位系統誤差模型,使用作圖法得到的系統定位誤差與誤差模型計算結果基本一致,存在的誤差為10-3數量級(主要由作圖軟件測量精度導致),說明采用誤差模型分析不同因素對掘進機定位誤差的影響是可行的。
(2) 采用交替測量式掘進機定位系統誤差模型研究角度測量誤差、測距誤差、推移步長及掘進機與測量平臺間距4個參數對井下掘進機定位誤差的影響規律。結果表明:角度測量誤差越大,定位誤差曲線曲率越大,即誤差增大越快,且YT軸定位誤差增大速度遠大于XT軸;測距誤差對XT軸定位誤差影響較大,測距誤差越小,初始XT軸定位誤差越小,不同測距誤差下XT軸定位誤差曲線曲率基本一致,說明測距誤差主要影響XT軸定位誤差初始值,不會影響其變化速度;隨著推移步長增大,YT軸定位誤差曲線曲率增大,即YT軸定位誤差增大速度加快,原因是在相同的角度測量誤差情況下,推移步長越大,角度對角邊越長,即定位誤差越大,因此為了減小定位誤差,可減小推移步長,增加測量次數;掘進機與測量平臺間距和推移步長對掘進機定位誤差的影響基本是等效的。
(3) 為進一步綜合分析多因素對掘進機定位誤差的影響,采用正交試驗方法分析了各因素對掘進機定位誤差的影響程度,通過極差分析方法得到了降低定位誤差的最優參數組合。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
