智能汽車自動駕駛的控制方法分析
2022-01-25 21:13:22鄒理炎虞忠潮
時代汽車 2022年2期
鄒理炎 虞忠潮

摘 要:自動駕駛汽車通過使用電腦系統來實現無人駕駛的目的,自動駕駛模式的應用能夠有效地解決各種類型的交通事故,降低人力成本,對促進社會發展具有重要的實用意義。但自動駕駛控制技術仍然存在諸多問題,例如傳感器的可靠性不強、控制系統存在漏洞等都影響著自動駕駛技術的安全性。基于以上背景,首先闡述了智能汽車自動控制系統的原理以及設計架構,然后分析了智能汽車自動駕駛的控制與執行,最后重點探討了智能汽車自動駕駛控制仿真驗證,以其為改進智能汽車自動駕駛控制方法提供參考。
關鍵詞:智能汽車 自動駕駛 控制方法
Abstract:Autonomous vehicles use computer systems to achieve the purpose of unmanned driving. The application of autopilot mode can effectively solve various types of traffic accidents, reduce labor costs, and has important practical significance for promoting social development. However, there are still many problems in automatic driving control technology. For example, the reliability of sensors is not strong, and the loopholes in the control system all affect the safety of automatic driving technology. Based on the above background, firstly, the principle and design architecture of the smart car automatic control system are explained, then the control and execution of the smart car automatic driving are analyzed, and finally, the simulation verification of the smart car automatic driving control is discussed, which is used to improve the control methods of the smart car automatic driving, and provide reference.
Key words:smart car, autonomous driving, control method
1 引言
自動駕駛汽車技術是一種利用人工智能、視覺計算、雷達監測以及定位等技術來實現無人駕駛的一種智能汽車控制技術,能夠根據路況條件自動地對車輛進行安全操作,以打造高效化的控制模式。但目前,受到傳感器、控制系統等因素的限制,目前所使用的汽車自動駕駛技術并未達到100%安全。比如,發生的某自動駕駛汽車致死事件,就是控制系統沒有識別出危險源而導致的。因此,對智能汽車自動駕駛的控制方法進行分析具有重要的實踐意義。
2 智能汽車自動駕駛技術概述
智能汽車自動駕駛技術是指利用電腦、雷達、傳感器等系統,實現汽車駕駛的智能化、無人化。智能汽車與傳統汽車的駕駛存在本質上的區別,自動駕駛的智能汽車能夠利用各種智能化、信息化、物聯網技術來幫助人們更加高效、安全地駕駛。具體而言,智能汽車自動駕駛技術是指利用定位系統、互聯網技術、智能技術、圖像處理技術等,通過對汽車行駛路況、行駛信息等的采集、整理、分析來達到汽車無人操控,實現路徑規劃、自動避障等目標。
3 自動駕駛系統原理及設計結構
汽車自動駕駛系統一般由三大模塊組成,即感知模塊、規劃決策模塊與執行模塊。其中感知模塊主要功能是對汽車行駛現場的各種信息進行采集,規劃決策模塊則是依靠感知模塊所采集到的信息,對駕駛的任務序列進行規劃與決策,執行模塊的主要功能是執行規劃決策模塊的指令,執行駕駛汽車的任務。(1)感知模塊。感知模塊主要由各種形式的傳感器組成,傳感器用來對汽車的行駛參數、行駛環境以及司機狀態進行檢測,對汽車行駛參數的采集主要依靠車輛運動傳感器實現,例如,車輛內的速度與角度傳感器可以提供車輛縱橫向的運動狀態信息。對行駛環境的檢測主要借助于環境感知傳感器實現,例如車輛內所布設的各種形式的雷達、攝像頭等均能夠對行駛車輛的周邊環境信息進行實時采集。另外,對司機狀態的檢測則主要是利用駕駛員位置處所布置的傳感器完成,通常包括生物電的非接觸式以及生物電傳感器接觸式兩種,一般駕駛員狀態檢測傳感器主要安裝在儀表板、方向盤等部位,能夠達到對駕駛員表情特征、心臟、腦電波等信息的采集,以此確保駕駛員處于最優的駕駛狀態,提升駕駛安全性。(2)規劃決策模塊。規劃決策模塊在一定程度上可以說是自動駕駛汽車的大腦,即決定怎樣駕駛。規劃決策模塊是由計算機組成的計算單元,各類傳感器將采集到的信息數據統一至計算單元,進行統一的規劃決策,進而確保汽車在行駛的過程中,能夠在各種突發情況下做出最優的實時響應,確保汽車行駛的安全性。(3)執行模塊。執行模塊是執行規劃決策模塊指令,通過接受規劃決策模塊的指令來控制汽車的轉向、剎車、停車的動作。
4 智能汽車自動駕駛的控制與執行
4.1 縱向控制
縱向控制主要包括對汽車駕駛運動狀態的控制,具體而言是指對汽車行駛速度、加速度的控制。通過汽車運動模型、制動模型以及油門控制模型之間的配合,根據汽車行駛信息的檢測來進行汽車的縱向控制。
4.2 橫向控制
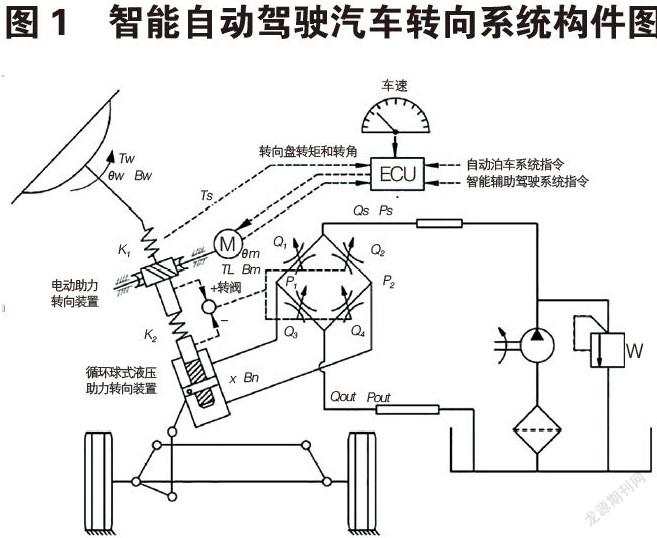
橫向控制是指對汽車自動行駛過程中運動方向的控制,橫向控制的實現離不開汽車轉向動力學模型的支持。也就是說汽車轉向動力學模型在本質上是一種精度型更高的汽車橫向運動模型,模擬駕駛員轉向操控經驗來獲取橫向控制算法。如圖1所示是某智能自動駕駛商用汽車轉向系統構件圖,在傳統的轉向系統基礎上增加了ECU控制單元,作為整車中的一個執行機構,ECU控制單元一方面接受來自整車控制器的轉向指令如轉向角度、轉向速度等,另一方面ECU控制單元需要實時監控整車實際的轉向情況并作出反饋,通過轉向系統預先設計好的控制算法做到實時修正,起到閉環控制的作用,讓整車行駛更安全、更高效。
4.3 車輛控制平臺
車輛控制平臺主要由整車ECU電子控制單元與通信總線兩大塊組成,其中整車ECU電子控制單元是用來對汽車行駛的控制與計算,通信模塊則主要用于指令的傳輸。整車ECU的結構原理與計算機類似。
4.4 智能汽車自動駕駛車輛道路狀況識別
自動駕駛汽車在行駛的過程中,對道路狀況信息的識別與處理是確保自動駕駛汽車行駛安全的重要保障,只有確保自動駕駛汽車能夠有效地對道路狀態進行識別,才能有效地發揮出車輛運行監督的作用。如圖2所示,為智能汽車自動駕駛車輛監督控制中的道路識別示意圖。自動駕駛車輛的道路狀況識別所使用的為狀態識別監督控制體系,即按照車輛運行監督控制要求對道路的狀況進行識別。以點t作為車輛監督運行中的時刻,在狀態監督基礎之上,與道路狀況識別功能相結合,進而確保為汽車駕駛監督提供保障。
4.5 智能汽車自動駕駛控制仿真驗證
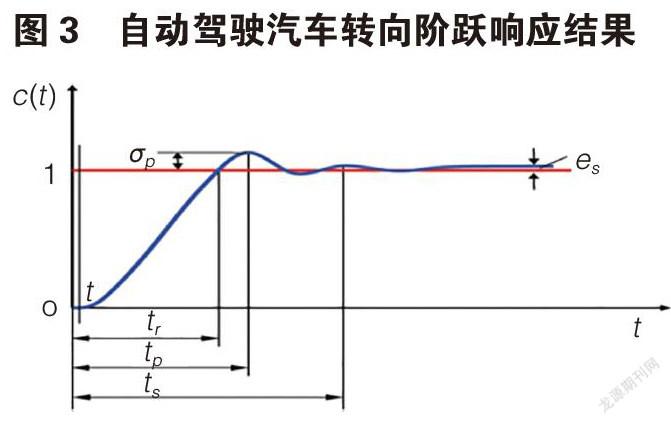
結合智能汽車自動駕駛控制工作的要求,對控制體系仿真實驗做出調整。從實驗仿真結果來看,在車輛自動駕駛控制過程中,對模糊PID控制體系的使用能夠對車輛的運行狀態進行控制與調整,并對車輛的運行監督控制方式進行調整優化,并按照仿真模型構建對自動駕駛控制系統進行了驗證。從圖3可以看出,車輛自動駕駛控制技術應用水平提升,其相應的模糊控制穩定性與平穩性均得到有效的提升,因此,為更好地達到監督車輛自動駕駛運行的效果,應按照監督控制要求,將上升時間和超調量進行優化調整,進而確保車輛能夠滿足自動駕駛需求。自動駕駛汽車轉向響應的實際效果與期望值是有一定的誤差,但通過對這些參數的仿真,并把它控制在有效的范圍內,將大大提高整車行駛的安全性,可控性。
響應時間(t):下發期望指令到轉向機開始動作的時間。
上升時間(tr):下發期望指令轉向機從開始動作到期望角度所用的時間
峰值時間(tp):下發期望指令到轉向機達到第一個峰值所用的時間。
超調量(σp):響應超出期望值的最大偏離量與期望值的百分比。
調節時間(ts):響應達到并把保持在期望值5%以內所需的時間。
穩態誤差(es):時間趨近于無窮時響應與期望值之間的誤差。
5 結論
車輛自動駕駛技術的出現,革新了車輛行業的發展模式,對社會、駕駛員以及行人均有益處。通過對自動駕駛控制技術的研究,相信隨著汽車自動控制技術的不斷發展,車輛自動駕駛技術將會得到普及,汽車交通事故將逐漸趨于零,為國家、社會節約大量的成本。且車輛自動駕駛具有減少能源消耗、緩解交通擁堵、降低運輸成本等優點,相信在不久的將來,車輛自動駕駛技術將在社會各個領域發揮更大優勢。
參考文獻:
[1]孫劍,黃潤涵,李霖,劉啟遠,李宇迪.智能汽車環境感知與規劃決策一體化仿真測試平臺[J].系統仿真學報,2020,32(02):236-246.
[2]雷洪鈞.汽車駕駛自動化分級技術要求及組織實施的探討[J].汽車工藝師,2020(05):25-29+33.