2016款奔馳GLC260制動輔助系統功能受限
2022-01-26 05:24:46河南劉勤中
汽車維修與保養 2021年9期
◆文/河南 劉勤中
故障現象
一輛2016款奔馳GLC260 4MATIC,搭載274 920型發動機,VIN碼為LE42539461L03****,行駛里程為69 105km,儀表提示主動制動輔助系統功能范圍受限,近光燈等故障信息。
故障診斷與排除
接車后首先進行功能檢查,發現該車故障持續存在,大燈常亮且無法通過大燈開關關閉,儀表臺上出現“主動制動輔助系統功能范圍受限,參見用戶手冊”“近光燈左側”“近光燈右側”“盲點輔助系統停止運作”等故障信息。但是,發動機可以正常啟動,且儀表臺上的擋位顯示正常,燃油表指示正常,車輛可以正常行駛。
查詢故障車的車籍卡發現此車帶代碼234盲點輔助功能和代碼258碰撞報警器,帶碰撞警示系統 (FCW) 停止主動制動干預。連接診斷儀進行快速測試,發現多個控制單元中存有故障碼。
電子點火開關N73中設置了1個當前狀態的故障碼:U104388-與外圍設備CAN總線通信存在功能故障,總線關閉,A+S。
駐車輔助控制單元N62中設置了3個當前狀態的故障碼:B122B14-外部右后距離傳感器存在功能故障,存在對地短路或斷路,A+S;B122O14-中部右后距離傳感器存在功能故障,存在對地短路或斷路,A+S;B12861C-后部距離傳感器存在功能故障,電壓值處于允許范圍之外,A+S。
組合儀表控制單元A1中設置了1個當前狀態的故障碼:U120E87-與盲點輔助系統的通信存在功能故障,信息缺失,A+S。
前SAM N10/6中設置了1個當前狀態的故障碼:U11A387-與“多功能攝像機”控制單元的通信存在故障,信息缺失,A+S。
電控車輛穩定行駛系統(ESP)控制單元N30/4中設置了10個當前狀態的故障碼:U1428FD-從“防碰撞輔助系統”控制單元接收到不可信的數據,A+S;U1428FE-從“防碰撞輔助系統”控制單元接收到不可信的數據,A+S;U1428FD-從“防碰撞輔助系統”控制單元接收到不可信的數據,A+S;U11A3FA-與“多功能攝像機”控制單元的通信存在故障,A+S;U11A3FB-與“多功能攝像機”控制單元的通信存在故障,A+S;U11A3FC-與“多功能攝像機”控制單元的通信存在故障,A+S;U105CFC-與“防碰撞輔助系統”控制單元的通信存在故障,A+S;U105CFB-與“防碰撞輔助系統”控制單元的通信存在故障,A+S;U105CFA-與“防碰撞輔助系統”控制單元的通信存在故障,A+S;U1444E1-接收到來自“雷達傳感器”控制單元的不可信數據,A+S。
左前門控制單元N69/1和右前門控制單元N69/2中設置了1個當前狀態的故障碼:U11A687-與“雷達傳感器”控制單元的通信存在故障,A+S。
轉向柱控制單元N80中設置了1個當前狀態的故障碼:U11A387-與“多功能攝像機”控制單元的通信存在故障,信息缺失,A+S。
多功能攝像機A40/11、防撞輔助系統控制單元A90、右側外后部內置雷達傳感器B92/6、左側外后部內置雷達傳感器B92/11、左側大燈E1n9、右側大燈E2n9、發動機控制單元N3/10、燃油泵控制單元N118、傳動系統控制單元N127、自動變速器控制單元Y3/8n4中則顯示“!”,即無法與診斷儀進行通信。
通過查看GLC整車網絡拓撲圖(圖1)發現,上述無法通信的控制單元的前6個屬于外圍CAN(CAN PER),這與中央網關—電子點火開關N73設置的故障碼U104388(與外圍設備CAN總線通信存在功能故障,總線關閉)形成了相互印證,說明外圍CAN網絡已癱瘓;而后4個無法通信的模塊屬于傳動CAN(CAN C1),但是中央網關—點火開關N73并沒有設置CAN C1總線關閉的故障碼。
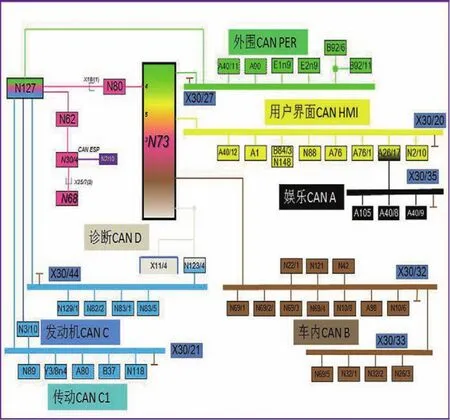
圖1 故障車型整車網絡拓撲圖
為什么會出現這種情況?這是因為從奔馳S級222車型上市開始,奔馳首次采用了STAR 2電子電氣架構(EEA)。其特點是采用FlexRay網絡取代了底盤CAN (CAN E),發動機控制單元N3/10的網關功能被取消,只是單純地控制發動機的運轉。再加上多種輔助功能的出現,傳動系統控制單元N127成了傳動系統的網關,CAN C1作為專門的傳動系統CAN,用于傳動系統各控制單元的信息通信。又因為車輛其它系統需要讀取到發動機的各類數據,就專門獨立出了CAN C,叫做發動機CAN。
駕駛授權的傳送路徑如圖2所示,點火開關N73通過FlexRay傳到傳動系統控制單元N127,再分別經過CAN C傳給N3/10,經過CAN C1傳給變速器控制單元VGS。

圖2 故障車型駕駛授權的傳送路徑圖
發動機CAN(CAN C)只有2個控制單元(圖3),一個是傳動系統控制單元N127,一個是發動機控制單元N3/10,他們之間并沒有分配器,那他們是怎么溝通的呢?在這2個控制單元內部各有一個120Ω的電阻,2個控制單元并聯起來之后,就是60Ω。
從圖3可以看出,N3/10的傳動系統運行所需的數據信息傳遞路徑和N3/10診斷數據的傳遞路徑是完全不同的。

圖3 故障車型診斷和信息傳遞路徑
發動機控制單元N3/10診斷數據要求的傳輸速度不高,所以是通過CAN C發送到傳動系統控制單元N127,之后通過外圍CAN PER傳到電子點火開關N73,最后再經過診斷CAN D傳輸到OBD II接口X11/4與診斷儀XENTRY進行通信(圖4、5),中間不經過FlexRay。

圖4 診斷儀讀取ME的傳輸路徑
而對于傳動系統內部各控制單元(比如變速器VGS、燃油泵控制單元N118)運行所需要的發動機控制單元N3/10數據信息則是通過傳動CAN C1內部交換;而車輛其他系統需要的發動機控制單元N3/10數據信息(如儀表顯示的發動機水溫數據)要求的傳輸速度快,所以通過傳動CAN C1傳遞給傳動系統控制單元N127,之后通過FlexRay傳送給電子點火開關N73,最后通過用戶界面CAN HMI傳送到組合儀表A1。
對于車輛其他系統需要的傳動系統的其他控制單元的數據信息(比如變速器VGS擋位信號、燃油泵控制單元N118的燃油液位信號),也是通過傳動CAN C1傳遞給傳動系統控制單元N127,之后通過FlexRay傳送給電子點火開關N73,最后通過用戶界面CAN HMI傳送到組合儀表A1。
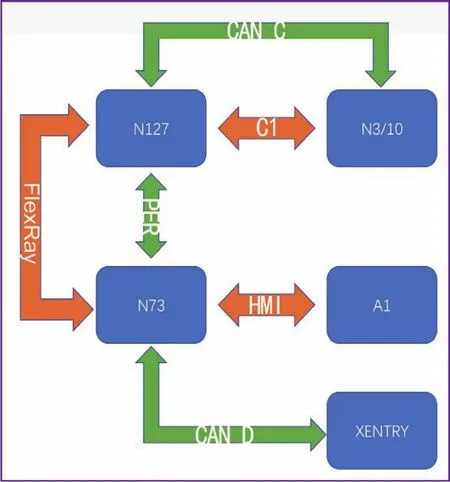
圖5 診斷和信號傳遞路徑
傳動系統其他各控制單元(如變速器VGS、燃油泵控制單元N118)診斷數據對傳輸速度的要求不高,都是通過CAN C1發送到傳動系統控制單元N127,之后再通過外圍CAN PER傳到電子點火開關N73,最后再經過診斷CAN D傳輸到OBD II接口X11/4與診斷儀XENTRY進行通信。
根據上述分析,筆者總結了故障車型發動機控制單元N3/10相關網絡通信的故障模式對應的故障現象如表1所示。
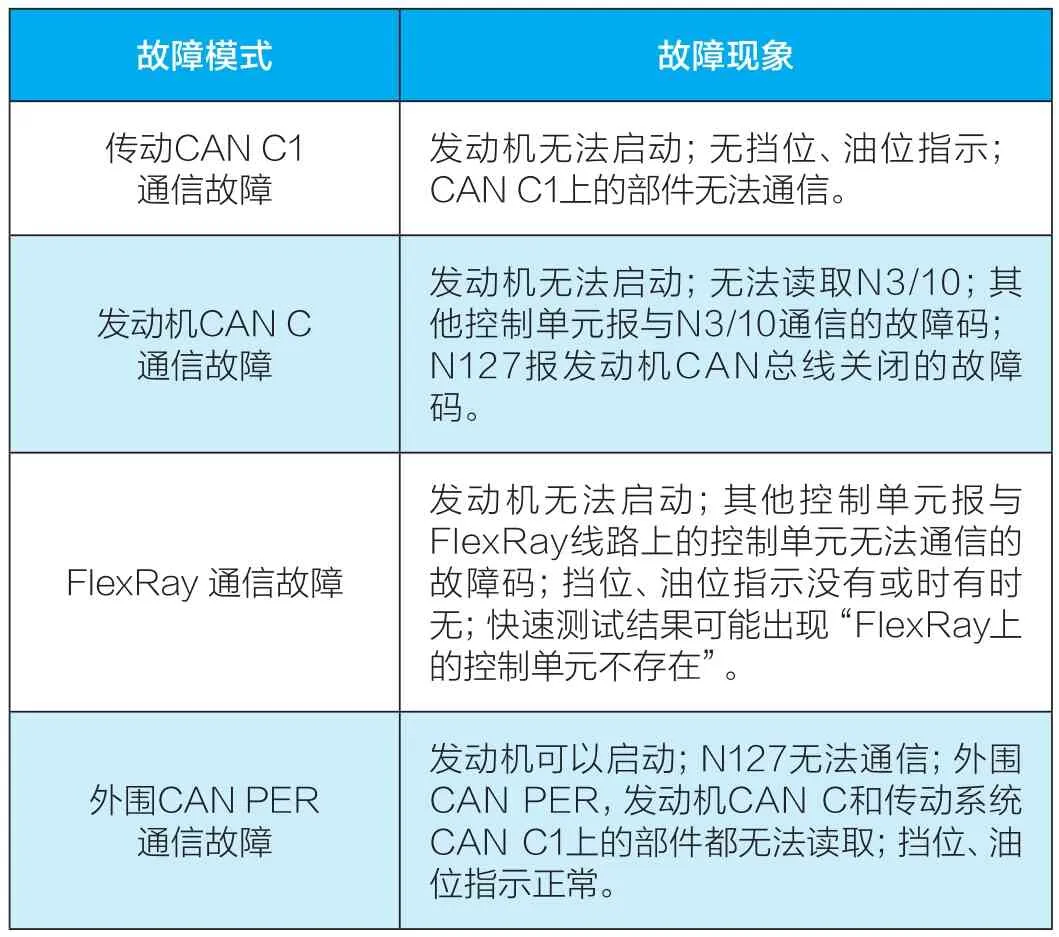
表1 故障車型發動機控制單元N3/10相關網絡通信故障
根據功能檢查的結果,結合快速測試的結果分析和表1中的故障模式,初步判斷故障車的外圍CAN PER存在通信故障,可能的故障原因有:外圍CAN某個模塊存在內部故障;外圍CAN線路故障;外圍CAN分配器故障。
拆檢左前門檻處的外圍設備CAN PER分配器X30/27(圖6),未見腐蝕等異常現象。用萬用表檢查CAN PER的電壓均為0,不正常。
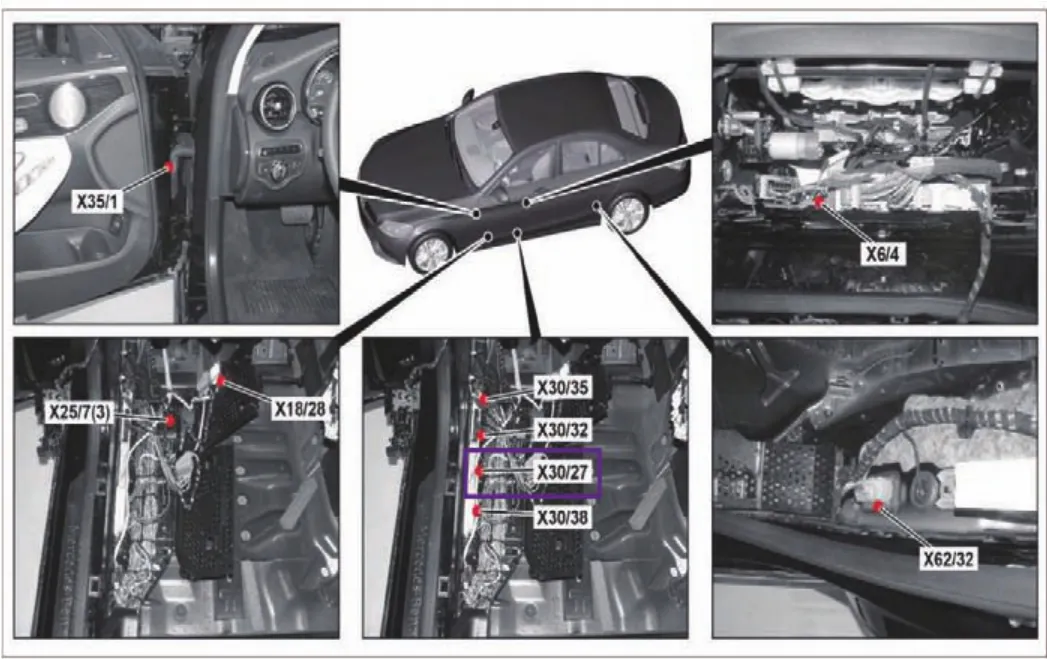
圖6 故障車型分配器X30/27安裝位置
據此分析,故障車因外圍CAN總線關閉,大燈處于應急狀態,保持常亮,無法關閉。將大燈開關擰到關閉位置,之后通過逐一拔下X30/27上的插頭,并觀察大燈是否熄滅。結果發現撥下其中一個插頭后,大燈熄滅了,并且CAN PER的電壓恢復正常,CAN H電壓為2.7V,CAN L電壓為2.3V。
再次進行快速測試,發現CAN C1上的控制單元(N3/10、N118、N127、Y3/8n4)都可以正常通信;CAN PER上的模塊A40/11、A90、E1n9、E2n9也恢復通信了,只有兩個盲點輔助雷達B92/6、B92/11無法通信。
斷開后杠上的大插頭X26/40,再插上分配器上的插頭,故障現象仍然沒有重現,說明問題出在大插頭X26/40之后。
舉升車輛進行檢查,發現消聲器有拖底碰撞的痕跡,且排氣管從尾喉中竄出,排氣管的出口已架到了尾喉的上方,高溫的排氣導致后杠中的線束出現了燒損現象,線束絕緣外皮完全被燒毀,線路之間相互短路(圖7)。

圖7 故障車排氣管從尾喉中竄出
詢問車主得知,該車在高速公路上托了一次底,之后繼續行駛了一段距離后出現了上述故障。
更換損壞的線束和熔斷的盲點輔助雷達的電源熔絲,重新安裝消聲器和排氣管及尾喉后試車,該車各項功能恢復正常,故障被徹底排除。
維修小結
本案例中,故障車因消聲器被撞擊后導致了排氣管移位,高溫排氣將后杠中的線束燒損,導致CAN PER數據線、電源、搭鐵線之間出現互相短路,從而使得CAN PER總線關閉、CAN C1模塊無法通信、大燈和主動制動輔助系統功能異常。
在故障診斷之前的問診環節,如果能與車主進行更詳細溝通和交流,或許能大大提高故障診斷的效率。
最后再補充一點。兩個盲點輔助雷達(B92/11左側外部后保險杠集成雷達傳感器和B92/6右側外部后保險杠集成雷達傳感器)的零件號相同,可通過針腳 5和針腳6是否搭鐵進行區分。B92/11是PIN1搭鐵,B92/6則有3根搭鐵線,分別是PIN1,PIN5和PIN6(圖8)。

圖8 故障車型盲點輔助功能電路圖
B92/11左側外部后保險杠集成雷達傳感器和B92/6 右側外部后保險杠集成雷達傳感器,根據主從原理工作,主功能或從功能可通過連接器編碼(搭鐵的PIN位置)確定。集成式右后保險杠雷達傳感器執行主功能,意味著集成式左后保險杠雷達傳感器將信息通過外圍CAN PER發送至集成式右后保險杠雷達傳感器。后者對來自兩個傳感器的相應信息進行評估, 并將相應的請求或數據通過外圍CAN PER發送至相關控制單元。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
中國科技論壇(2017年7期)2017-07-25 08:49:53
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
