基于作動器非線性特性的電磁主動懸架混合控制
2022-01-27 07:53:32胡一明李以農
中國機械工程 2022年2期
關鍵詞:模型
胡一明 李以農 鄭 玲
重慶大學機械傳動國家重點實驗室,重慶,400030
0 引言
智能電動汽車是當前汽車工業研究中的熱點[1],智能電動汽車高功能集成以及動力學特性智能可控的特點對底盤系統提出了更高的要求。作為智能底盤系統的核心,智能懸架多參數可調、響應快速、節能環保,是實現電動汽車智能化的關鍵。
電磁主動懸架結構緊湊、配置簡單、控制響應快速高效[2-3],已逐漸取代空氣懸架[4]、液壓懸架[5]等,成為智能懸架研究中的熱點。其中直線式電磁主動懸架克服了旋轉式電磁主動懸架傳動鏈長、傳遞效率損失大、作動力響應遲滯的問題[6-7],成為目前電磁主動懸架主要的研究方向[8-10]。
目前大部分關于直線式電磁主動懸架的研究都將直線電磁作動器考慮為理想的線性模型[11],理想作動器模型的作動力與輸入電流成正比,忽略了直線電機齒槽結構、端部效應、磁場諧波、磁場飽和等因素導致的電磁力非線性特性。作動器的非線性特性會導致主動懸架控制力輸出產生誤差,對主動懸架的性能造成一定的影響。
電磁作動器的非線性特性主要包括電磁力的波動問題[12]與電磁力的飽和問題[13],其中電磁力的波動是指由直線電機齒槽結構、端部效應及磁場諧波等因素導致電磁力在作動器徑向不同位置處的幅值不相等,呈現周期性的波動;電磁力的飽和是指由于磁場飽和等因素而導致的電磁力輸出存在一個最大值。
目前針對作動器非線性特性對電磁主動懸架控制性能影響的研究相對較少,大部分研究主要著眼于作動器的本體結構,通過合理的結構設計與參數優化來削弱作動器的非線性特性,但作動器的非線性特性是其固有屬性,無法被完全消除,因此從作動器結構設計的角度無法完全消除非線性特性對電磁主動懸架控制效果的影響[14]。
綜上所述,本文以直線式電磁主動懸架為研究對象,通過直線式作動器結構設計與磁場諧波分析,建立直線作動器的電磁力非線性模型;結合主動懸架,建立電磁主動懸架非線性動力學模型,分析直線作動器非線性特性對主動懸架控制性能的影響;為了消除影響,設計基于濾波遞歸最小二乘法(FxRLS)自適應補償的約束H2/H∞魯棒混合控制器,控制器能對主動懸架控制力進行補償,使實際控制力接近理想控制力,從而消除作動器非線性特性對主動懸架性能的影響。
1 非線性電磁主動懸架動力學模型
1.1 電磁作動器模型
圖1所示為直線式電磁主動懸架典型結構,作動器初級鐵心(定子)與輪軸、輪轂、電機和輪胎等簧下質量相連,次級鐵心(動子)與車架等簧上質量相連。
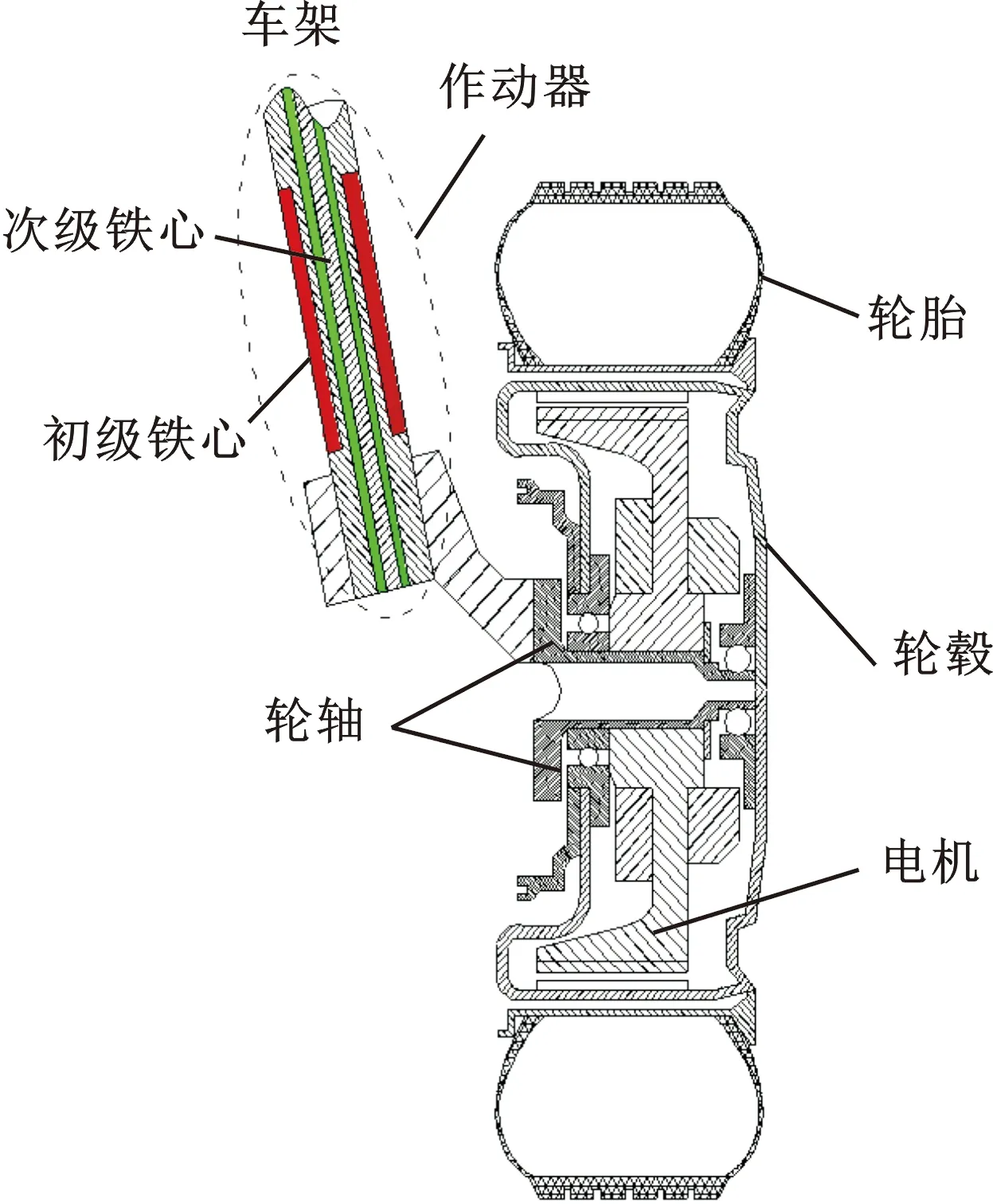
圖1 電磁主動懸架結構Fig.1 Structure of electromagnetic active suspension
本文直線永磁式作動器采用12槽14極分數槽設計,其中三相繞組采用雙層布置。作動器結構如圖2所示,作動器尺寸如表1所示。

圖2 直線式作動器結構Fig.2 Structure of linear actuator
1.2 電磁力波動特性解析
為分析直線式作動器的非線性特性,建立作
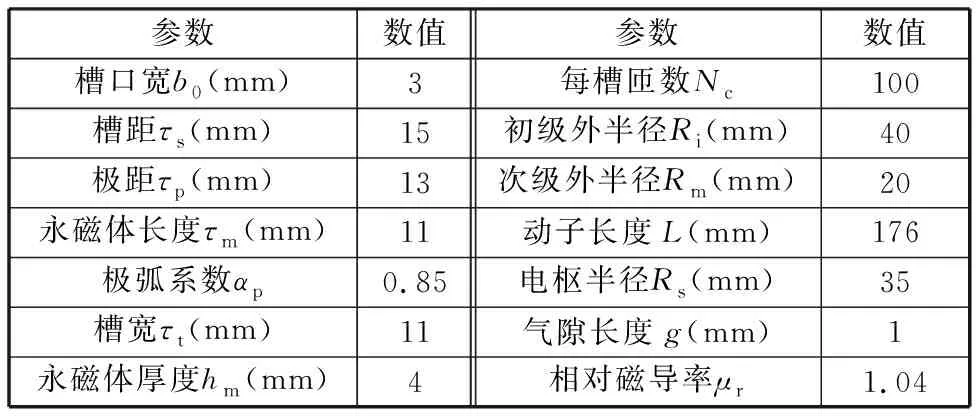
表1 作動器結構參數
動器感應電動勢理論計算模型。對于圖2所示的直線式作動器,其氣隙繞組的感應電動勢可以表示為[15]
(1)
式中,E為感應電動勢;Ψ為繞組磁鏈;v為作動器定子與動子的相對速度;p為直線電機極對數;Kdpn為繞組系數;Krn為氣隙磁場分布系數;n為諧波階次;mn為磁鏈的角頻率;z為定子與動子的相對位移;τcp為繞組線圈的節距。
繞組系數可表示為
(2)
氣隙磁場分布系數可表示為
Krn=Rse[aInI1(mnRse)+bInK1(mnRse)]
(3)
式中,aIn、bIn分別為第一類貝塞爾函數的系數,與直線作動器的極弧系數和有效電樞半徑有關;I1、K1分別為1階修正貝塞爾一類和二類函數。
有效電樞半徑Rse可表示為
Rse=Rm+ge
(4)
其中,ge為有效氣隙長度,可表示為
ge=g+(Kc-1)g′
(5)
(6)
(7)
(8)
式中,Kc為卡特系數;g′為考慮齒槽效應的氣隙長度;γ為齒槽系數。
根據機電能量轉換原理,當繞組導通輸入電流時,作動器的電磁力可以表示為
(9)
式中,P為作動器輸入總功率;EA、EB、EC為各相感應電動勢;IA、IB、IC為各相電流。
三相交流電可表示為
IA=IAmaxsin(ωt-2π/3+φ)
(10)
IB=IBmaxsin(ωt+φ)
(11)
IC=ICmaxsin(ωt+2π/3+φ)
(12)
式中,IAmax、IBmax、ICmax為各相電流峰值;ω為電流角頻率;φ為初始相位角,與感應電動勢初相位一致。
根據式(9)設定工況速度為0.24 m/s,輸入電流為1 A,定子與動子相對位移Δs范圍為0~150 mm。作動器的電磁力輸出與相對位移的關系如圖3所示,可以看出作動器電磁力輸出并非恒定值,與定子動子的相對位移呈周期性的波動關系,最大值113.0 N,最小值105.2 N,波動量為7.8 N,電磁力的波動使作動器實際輸出與理論值有一定的誤差。
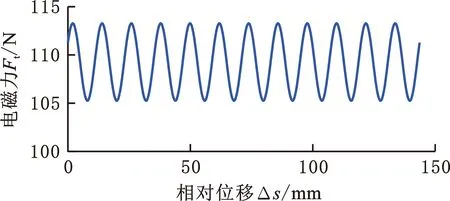
圖3 作動器電磁力與相對位移關系Fig.3 The relationship between the electromagnetic force of the actuator and the relative position
1.3 電磁力飽和特性解析
為了分析作動器電磁力的飽和特性,采用Ansoft Maxwell軟件建立圖4所示的作動器有限元模型,作動器動子和定子鐵心采用冷軋硅鋼片疊制而成,型號為DW465_50;永磁體為釹鐵硼N30,矯頑力838 kA/m,剩余磁密1.1 T,采用徑向充磁,繞組為銅線,直徑為1 mm,氣隙空間設置為真空。在作動器運動的區域外施加Balloon氣球邊界。由于本文作動器為對稱結構,故模型關于Z軸旋轉對稱。

圖4 作動器有限元模型及網格劃分Fig.4 Finite element model and meshing of the actuator
當定子動子相對位移不變時,接通外部電流,分析不同輸入電流時作動器電磁力的輸出,結果如圖5所示,圖中包含了理論計算結果以及有限元仿真結果。

圖5 作動器電磁力與電流關系Fig.5 The relationship between electromagnetic force and current of actuator
從圖5中可以看出,理論計算的電磁作動力呈線性增長,斜率約為98 N/A。大多數文獻對該電磁作動力的計算均默認為電流的線性函數,而受作動器磁場飽和及溫升效應的影響,實際電磁力并非穩定地線性增長,電磁力在電流幅值為0~2 A時基本呈現線性增加,斜率與理論計算一致,2~2.8 A時電磁作動力增長逐漸趨于平緩,當電流大于2.8 A時電磁作動力穩定于233 N。
如上所述,可以看出直線式作動器的非線性特性主要包括兩個方面,即由磁場諧波導致的電磁力波動現象以及磁路飽和導致的電磁力飽和現象。
1.4 考慮作動器非線性輸出的主動懸架模型
以四分之一車輛動力學模型為基礎,結合電磁力解析模型與有限元模型,建立考慮作動器非線性電磁力輸出的電磁主動懸架仿真模型。圖6為非線性模型的總體結構圖,其中主動控制器為廣泛采用的LQR控制器,作動器輸出基于前述的電磁力波動解析模型。圖中,Ms、Mu分別為簧載質量和非簧載質量;Ks、Cs分別為懸架的剛度和阻尼;Kt為輪胎剛度;Zs、Zu、Zg分別為簧載質量的位移、非簧載的質量位移以及路面不平度激勵;Fa為主動控制力,Ke為電機常數[16]。

圖6 考慮非線性電磁力的主動懸架動力學模型Fig.6 Dynamic Model of Active Suspension Considering Nonlinear Electromagnetic Force
系統耦合邏輯如下:控制器根據需求的理論控制力得到理想輸入電流,作動器輸出模型根據系統運行狀態(定子動子相對速度、定子動子相對位移)得到包含波動項的實際輸出控制力,根據有限元分析結果,將電流峰值限制為2.8 A以模擬磁路飽和,最后,將實際輸出的控制力Fa加載于系統得到車輛動力學響應。模型的結構參數如表2所示。
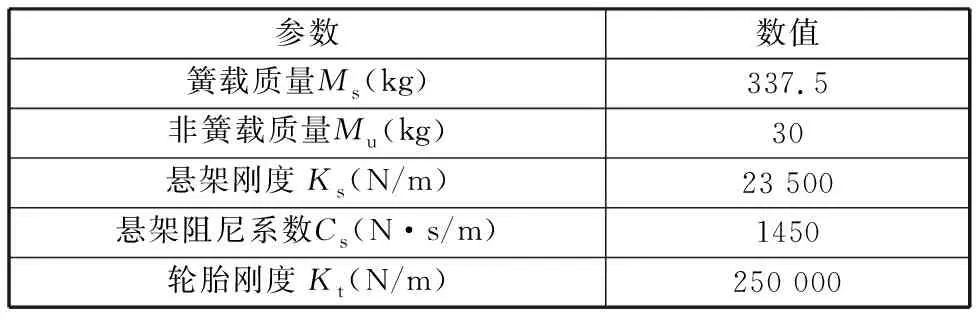
表2 車輛結構參數
2 電磁主動懸架混合控制
目前廣泛采用的主動懸架控制算法如LQR控制、魯棒控制等大多是基于線性的控制力輸出,而作動器非線性輸出會降低系統的控制性能,破壞控制器的平衡。本文采用自適應濾波反饋控制與魯棒前饋控制結合的混合控制器來緩解作動器非線性特性對主動懸架性能影響。通過約束H2/H∞魯棒前饋控制器得到車輛所需的理論控制力,并通過FxRLS自適應濾波反饋控制器對輸入電流進行補償以消除電磁力輸出波動。
2.1 FxRLS自適應控制力補償
當作動器存在非線性特性時,實際輸出電磁力與理論輸出電磁力不相等,本文以FxRLS自適應濾波器作為反饋控制器,根據車輛的工作狀態對實際輸入電流進行補償以達到減小控制力輸出誤差的目的。根據文獻[17-18]擬定自適應濾波器迭代控制算法如下:
(13)
MQ×m×k=
濾波器的電流輸出為
(14)

當濾波權重W迭代收斂時,濾波器能對實際輸入的控制電流Iq進行補償,從而對作動器實際輸出的控制力進行補償,使其接近理想控制力Fa。
2.2 多目標粒子群約束魯棒控制器
魯棒控制器用來計算所需的理論控制力,且保證一定峰值力約束下的性能最優,根據文獻[19-21],本文采用約束H2/H∞魯棒控制器。
將車輛動力學方程表示成如下約束形式的狀態方程:
(15)
式中,A、B1、B2、C1、D11、D12、C2、D21、D22為系統的參數矩陣;z2i,max為H2性能指標最大允許輸出;ui,max為最大允許控制力輸出。
選擇簧載質量振動加速度作為H2性能指標,選擇懸架動撓度和車輪跳動量作為H∞性能指標,則狀態變量與系統輸出變量分別為
Z2=[Zu-ZsZg-Zu]T

(16)
S=A+B2K

(17)
(18)
(19)
(3)系統約束成立的條件為,對于給定的常數α,當且僅當存在一個對稱的正定矩陣U以及Z,使得:
(20)
(21)
(22)
(23)

2.3 控制器反饋矩陣的求解
約束H2/H∞魯棒控制律求解可以描述為如下的多目標尋優問題:
(24)
L={x∈Rn,G:gi,min≤gi(x)≤gi,max,
i=1,2,,…,u}
(25)
式中,L為變量設計約束;Rn為設計變量域;G為變量約束。
如上所述,可利用多目標粒子群算法(MOPSO)對控制律K進行搜索,使得γinf與γ2最小,優化變量取控制律K與參數α。參數α僅能保證理論上的性能約束,且難以選取,會造成控制律K搜索的保守性,本文在多目標優化過程中加入時域約束判定,通過多目標粒子群算法的特殊性,用任意搜索的解對系統進行動力學仿真,如果解不滿足最大控制力要求,則排除此解,使得優化結果滿足約束條件。多目標粒子群算法流程如圖7所示。
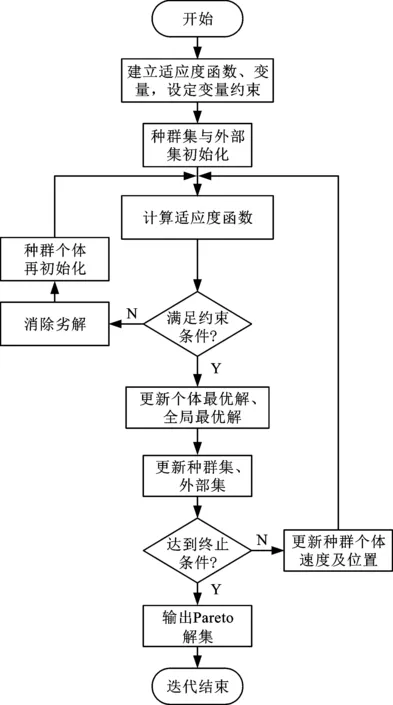
圖7 多目標粒子群計算流程圖Fig.7 Flow chart of MOPSO
圖8為尋優結果的Pareto前沿可視圖,Pareto解集中共有430個解,各個解之間均滿足Pareto非支配關系。Pareto解為一系列非支配解,需要從解集中選取典型解作為控制器的控制律,為了排除解選取中的人為因素,采用模糊集理論對Pareto解進行選優[22]。
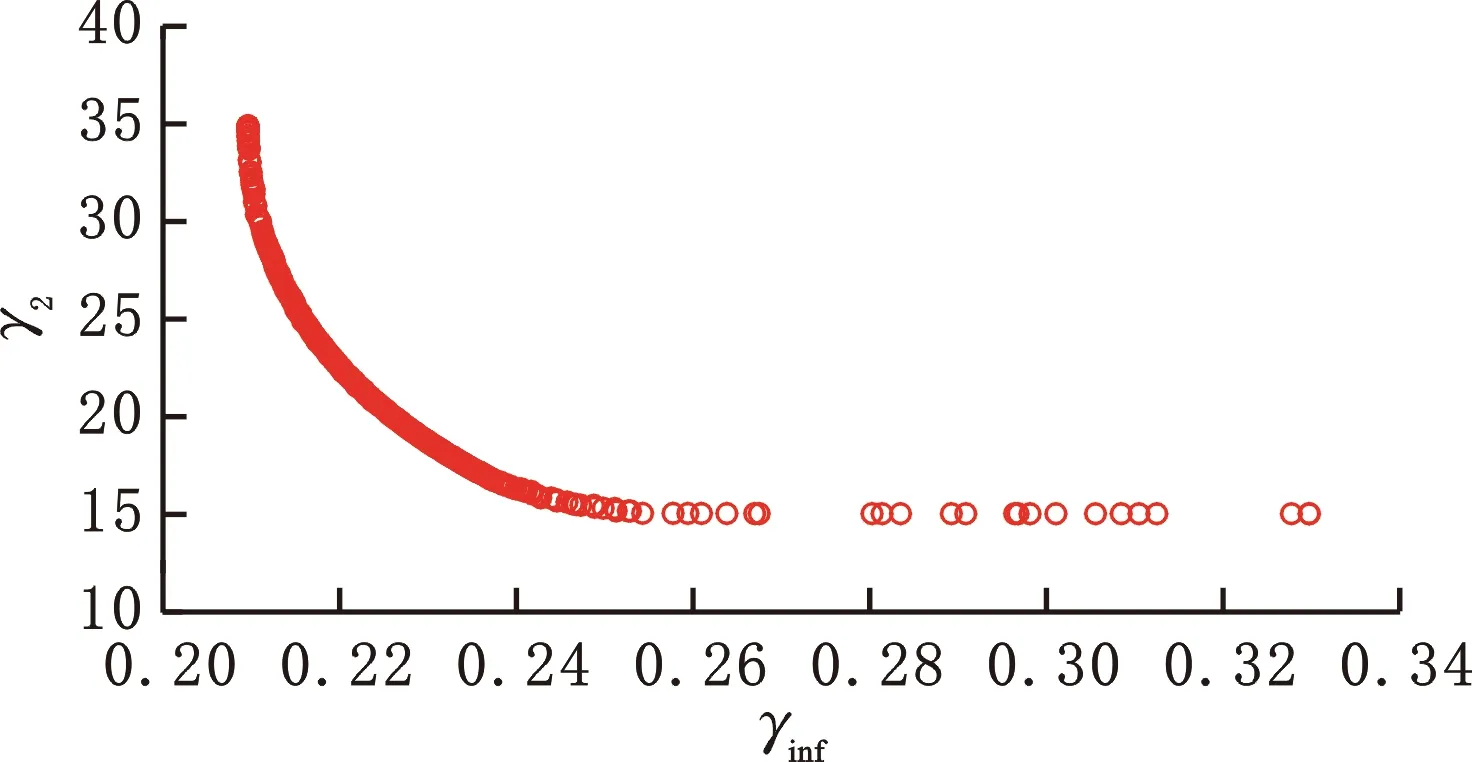
圖8 Pareto前沿可視圖Fig.8 Pareto front
定義隸屬函數:
(26)

定義支配函數φk,第k個解的支配值為
(27)
式中,l為外部集中解的數目;n為懸架優化設計目標個數。
根據模型的仿真結果,l=430,n=2。圖9所示為解集中各解的支配值,其中最大支配值為第330號解,將此解作為魯棒控制器的控制律。

圖9 外部集中各解的支配值Fig.9 Dominant value of each solution in external set
將上述所設計自適應補償控制器以及約束H2/H∞魯棒控制器串聯,得到圖10所示的混合控制器。混合控制器控制邏輯為:H2/H∞魯棒前饋控制器通過系統狀態估計得到當前系統所需的理論控制力,基于線性電機常數得到理論輸入電流,通過理想的控制輸入得到此時車輛的理想系統響應估計;基于理想的系統響應與實際系統響應的誤差,采用FxRLS自適應濾波算法對理想輸入電流進行補償得到實際輸入電流,從而得到實際控制力輸出。FxRLS自適應濾波反饋控制器的作用在于使系統的實際響應與理論響應一致,當兩者一致時即說明控制力輸出與理論控制力輸出一致。
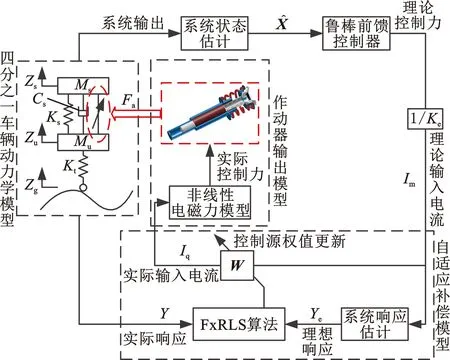
圖10 混合控制器控制邏輯Fig.10 Control logic of hybird controller
3 結果分析
根據上述介紹對基于LQR控制器與混合控制器的非線性動力學模型進行仿真對比分析,自適應濾波控制器階數為24,仿真工況為B級路面,車速為72 km/h。
3.1 考慮作動器非線性的輸出特性分析
圖11為作動器電磁力輸出特性圖,表3所示為作動器輸出值對比。可以看出基于LQR控制器的主動懸架實際控制力輸出與理論值有明顯的差距。較大的控制力輸出峰值由于磁場飽和效應難以達到,而較小的控制力輸出也存在可見的波動誤差。由圖11b的頻域對比可看出,實際控制力輸出能量在車輛的一階自然頻率和二階自然頻率附近均有明顯降低,根據統計結果,實際輸出控制力的均方根值由207.9 N降低至146.3 N,峰值由591.2 N降低至252.9 N,實際輸出與理論輸出之間的差值最大達到404.7 N,均方根值達到83.9 N,這種作動器實際輸出的誤差與不足可能導致控制器性能的降低或控制目標之間的失衡。由圖11c可以看出,基于混合控制的電磁主動懸架實際輸出控制力與理論控制力比較接近,實際控制力與理論控制力的均方根值分別為95.6 N、87.0 N,控制器的輸出誤差較小,控制力峰值分別為250.9 N、224.9 N,作動器的輸出基本覆蓋了理論控制力的需求范圍。但如表3所示,控制力輸出與控制效率的降低是否會影響控制器性能有待進一步分析。

(a) LQR控制控制力輸出對比

表3 作動器輸出統計結果
3.2 系統響應特性分析
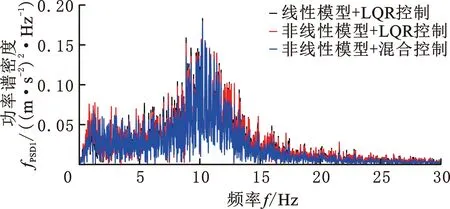
圖12為車輛的時域響應對比圖,圖13為時域響應的功率譜密度圖,表4所示為系統響應的均方根值統計對比。
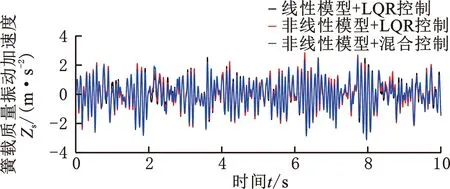
(a) 簧載質量振動加速度
如圖12a、圖13a所示,當考慮作動器非線性特性時,車輛在一階自然頻率附近出現了性能惡化,其時域響應峰均有一定的增大,根據前述分析,可推測作動器的非線性特性導致的輸出誤差使主動懸架在舒適性控制目標上存在一定的性能惡化。基于混合控制的主動懸架改善了低頻處的控制器性能,均方根值由0.99 m/s2降低至0.96 m/s2,基本消除了作動器非線性特性對舒適性的影響。從頻域上看,一階自然頻率與二階自然頻率附近的振動能量都有明顯的降低。
(a) 簧載質量振動加速度

表4 系統響應統計結果
由圖12b、圖13b可以看出,作動器非線性特性對懸架動撓度的影響較大,時域響應輸出升高明顯,從功率譜密度圖上看,一階自然頻率附近振動能量顯著增大,二階之后的高頻振動能量也有一定的增大,其均方根值由8.0 mm升高至8.74 mm,性能惡化9.1%。混合控制器能在保證高頻振動能量不惡化的情況下,優化主動懸架一階自然頻率附近的響應,均方根值由8.74 mm降低至7.41 mm,性能提高15%,大幅優化了車輛的姿態控制能力。
從圖12c、圖13c中可以看出,車輪跳動對作動器非線性特性不敏感,其時域響應僅有小幅升高,頻域上變化也不大。而基于混合控制器的系統在車輪跳動量上甚至有小幅升高,均方根值由3.62 mm上升至3.71 mm,性能小幅惡化2.5%,這是由于主動控制力減小導致,控制能量的減少勢必會犧牲某一方面的性能,由于仿真車速較低,輪胎接地性能的略微降低處于可以接受的范圍,對行駛安全性的影響較小。
總地來說,作動器的非線性特性會導致主動懸架電磁控制力的輸出產生一定的誤差,使得主動懸架控制性能降低,并且打破原主動懸架控制目標之間的平衡。而混合控制器以極小的代價消除了作動器非線性特性對控制性能的影響,使得作動器長期工作在非飽和區間,降低了作動器的能量消耗,既提高了作動器硬件的工作穩定性及耐久性,又使控制器理論設計與實際工作特性匹配程度更高。
4 結論
本文針對直線作動器非線性特性導致的電磁主動懸架性能降低問題,采用理論分析與仿真分析相結合的方法,建立了考慮作動器非線性特性的電磁主動懸架動力學模型。研究了非線性特性對主動懸架控制性能的影響,提出了基于FxRLS自適應濾波補償與多目標粒子群約束H2/H∞魯棒控制結合的混合控制方法,得到的結論如下:
(1)主動懸架電磁作動器的非線性特性主要包括磁場飽和導致的作動力輸出不足以及電磁力波動導致的控制力輸出誤差。對于傳統主動懸架控制器,其控制力不足最大可達404.7 N,波動量的均方根值可達83.9 N,導致懸架控制性能有一定程度的降低,控制器理論設計與實際工作特性不匹配,作動器非線性特性使得簧載質量振動加速度、懸架動撓度以及車輪跳動量分別降低4.0%、9.1%、3.5%。
(2)FxRLS自適應濾波補償與約束H2/H∞魯棒前饋控制器相結合的混合控制器,在控制器理論設計階段就將實際控制力約束于作動器工作的非飽和區間,且能對電磁力的波動進行自適應的補償,有效地降低了作動器非線性特性對電磁主動懸架性能的影響,提高了作動器的工作穩定性及耐久性,降低了主動懸架控制器理論設計與實際工作情況的不匹配度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
