基于RTK定位技術的輸電線路緊線施工無人機實時弧垂測量系統研究及應用
2022-02-02 08:48:24孫忠慧侯新文肖海濤楊景崳
湖北電力 2022年5期
鐘 燃,孫忠慧,侯新文,葛 雄,雷 雨,肖海濤,楊景崳
(國網湖北超高壓公司荊門運維分部,湖北 荊州 448000)
0 引言
為了充分發揮架空輸電線路在電力資源調配以及區域傳輸方面的積極作用,充分滿足經濟發展、社會生活各個環節對于電力資源的使用需求,現階段我國電力企業投入大量資源用于支持架空輸電線路建設活動。而輸電線路是一項基礎性工程,具有復雜性、系統性特點,尤其是緊線施工,如若處理不當,勢必會影響供電穩定性,良好的弧垂觀測和調整,是確保線路運行安全的關鍵[1-7]。
目前,架空輸電線路的施工過程中,弧垂觀測主要采用等長法、異長法和角度法等3 種人工觀測方式。其中等長法、異長法需要人工登塔檢測,風險系數高、測量誤差大,而角度法只需在地面使用經緯儀即可進行測量,具有安全、精確等特點,已逐漸成為行業主流的弧垂觀測方法。但角度法仍然需要依靠人工觀測,其測量的結果仍舊難免會受觀測人員的經驗知識、操作技能、作業規范程度等人為因素的影響,存在一定的局限性[8-13]。基于以上背景,本項目將深度融合無人機、激光雷達、高精度衛星定位等前沿技術,研究一種基于RTK 定位的輸電線路緊線施工無人機實時弧垂測量系統,通過該“機器換人”的創新作業模式,提高弧垂測量的自動化和智能化程度,解決架空輸電線路弧垂自動測量的難題并實現提質增效。
1 基于RTK定位的無人機實時弧垂測量系統簡介
基于RTK 定位的輸電線路緊線施工無人機實時弧垂測量系統,針對輸電線路緊線施工環節,研究通過無人機搭載激光雷達,自動探測、記錄相鄰兩基輸電線路桿塔的絕緣子掛點的高精度位置信息,根據探測到的定位信息,結合特定的公式,計算出設計弧垂垂點的高精度位置信息,而后人員操作無人機飛至垂點的位置并懸停,以此作為位置標記,再通過絞磨機將導線收緊至無人機懸停的位置,最終完成輸電線路緊線施工的工序[14-17]。
2 基于RTK定位技術的輸電線路緊線施工無人機實時弧垂測量技術
2.1 無人機與絕緣子掛點自適應距離智能調節技術研究
應用PID控制算法對無人機的俯仰與偏航進行閉環控制,使無人機與目標絕緣子掛點始終保持固定垂直距離以及水平距離。無人機搭載的激光雷達能夠對前方的障礙物進行距離探測,并且強大的掃描分辨率能夠識別諸如導線等細微物體,使得無人機具備自主避障功能[18-21]。本研究對無人機垂直以及水平方向控制采用增量式PID 控制器,其設計增量式PID 算法的輸出量為:

式(1)中,e(k)、e(k-1)、e(k-2)分別為第k次、k-1 次和k-2次測量值與設定值之間的偏差值,Kp、Ti、Td分別為比例系數、積分系數和微分系數,T為采樣周期,u(k)為控制器的輸出量。無人機與目標絕緣子掛點之間水平距離與設定距離的偏差值e1以及無人機與目標絕緣子掛點之間垂直距離與設定距離的偏移量e2后,將此兩個值分別輸入到增量式PID 控制器中,控制器根據計算結果輸出水平方向以及垂直方向的控制值從而控制無人機運動。
無人機左右側裝有FOV紅外避障,FOV紅外避障模塊通過紅外激光的一發一收以及長條發射能夠有效探測距離達7 m,感知范圍為水平方向70°、垂直方向20°的錐體區域內的障礙物。無人機對目標絕緣子掛點進行位置測量時,可以設定相應的安全距離閾值。一旦無人機探測到四周的距離低于這個閾值,即無人機可以實現緊急停止,確保無人機設備的安全。
2.2 無人機搭載激光雷達自動探測導線技術研究
無人機飛行平臺沿著高壓線路搭載光學相機定點飛行至需要檢測區域,然后開始利用IMU 高精度角度傳感器進行角度掃描測量,結合二維激光雷達掃描到的距離數據,以及無人機搭載的空間定位系統進行采樣的空間位置數據,可以獲取該區域空間點云數據。通過基準站上的GPS 接收機和數據發送電臺,實時確定無人機的飛行位置,最終利用無人機飛行姿態參數的修正實現高精度位置測量任務。同時,記錄交叉跨越式的上下兩個點云集數據記錄在內存空間中,規劃設計無人機飛行平臺的飛行路線,對待檢區域進行分塊,而后對每塊區域采集到的空間位置數據進行統計和分析[22-24]。
架空輸電線路導線空間位置點云數據擬合分析技術原理如下:
在空間中以所述無人機起飛點參考點O,取一直角標架[O,e1,e2,e3];無人機相對參考點O 的位置為P(x',y',z');P'(x',y',0)為點P(x',y',z')在xoy平面的投影;兩座高壓線塔之間的電線為黑色粗直線L1、L2(為了作圖簡潔,此處以直線代替曲線)如圖1 所示;M1(x1,y1,z1),M2(x2,y2,z2)是高壓電線L1、L2 上的點相對于參考點O的直角坐標信息;顯然有M1PM2平面平行于xoy平面。以P為參考點建立的極坐標系下,M1(ρ1,θ1)、M2(ρ2,θ2)是如圖2所示目標高壓電線L1、L2上的點M1、M2相對于參考點P的極坐標信息。
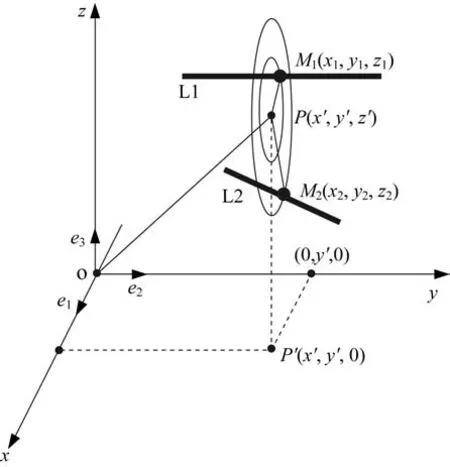
圖1 模擬高壓電網空間圖Fig.1 Space diagram of simulated high voltage power grid

圖2 以無人機為參考點的極坐標系圖Fig.2 Polar coordinate system with UAV as reference point
通過無人機空間定位技術以及IMU角度檢測技術可以獲得P(x',y',z')的高精度數據;激光雷達提供目標 高 壓 電 線L1、L2 上 點M1、M2的 極 坐 標 數 據M1(ρ1,θ1)、M2(ρ2,θ2),所以目標高壓電線L1、L2 上點M1、M2的直角坐標數據可以通過如下方式計算得出

式(2)~式(4)中,i=1,2。
從而根據高壓導線空間點云數據,模擬高壓電網空間。要模擬架空高壓線L1 和L2 凈空距離曲線,需要通過距離公式展開進一步計算:

由觀測數據,擬合結果freal(t)近似一元二次函數。
因為系統誤差、偶然誤差不可能完全消除,所以這里用最小二乘法對距離曲線做進一步優化:

求解上面方程組式(6)、式(7)可得凈空距離擬合函數f(t)的準確表達式,進而可以在二維平面上做出凈空距離擬合函數圖像。
2.3 無人機架空輸電線路導線弧垂檢測技術研究
無人機搭載激光雷達飛行至相鄰兩座輸電線路桿塔的絕緣子掛點附近位置,通過高精度位置測量技術對絕緣子掛點進行位置測量,分別獲取到兩個絕緣子掛點的高精度位置數據,無人機再自動將位置數據發回至地面站,然后由地面站應用中基于特定公式編寫的算法對位置數據進行計算處理,從而獲得導線的弧垂垂點位置數據,而后操作無人機飛至垂點位置并懸停,最后將導線收緊至無人機懸停的位置[27-30]。
在圖3所示的現場測量示意圖中,A為導線起點;B 為導線終點;C 為導線中任意一點。無人機飛行的RTK,經過處理得到一條擬合后的曲線,由此可知導線所有點空間信息,則可知A、B、C 3 點的度分別為H1、H2、H3 和AC、BC 兩點的距離為d1、d2,根據以A 點坐標的0 高度為坐標原點,則A、B、C 3 點的坐標分別表示為(0,H1)、(d1,H2)和(d2,H3)。將3點的坐標擬合成一條一元二次的曲線ax2+bx+c= 0 和AB 連線的一元一次方程kx+c= 0,則可分別求出a、b、c、k的值。已知方程的表達式,則弧垂距離F的表達式為:
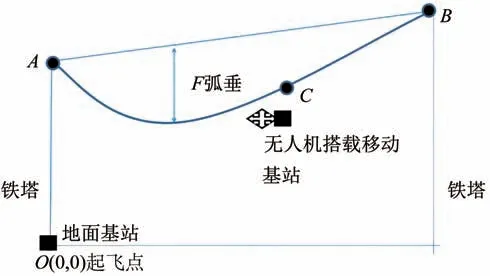
圖3 現場測量示意圖Fig.3 Schematic diagram of field measurement


圖4 輸電線路弧垂示意圖Fig.4 Sag diagram of transmission line
3 結語
本文針對輸電線路緊線施工中使用弧垂觀測3種人工觀測方式的局限,通過RTK 定位,利用無人機開展實時弧垂測量,推動架空輸電線路施工技術向高精度、自動化、智能化方向發展。基于RTK 定位的無人機實時弧垂測量集合了3 項技術,包括無人機與絕緣子掛點自適應距離智能調節技術、無人機搭載激光雷達自動探測導線技術和無人機架空輸電線路導線弧垂檢測技術,融合了無人機、激光雷達、高精度衛星定位等前沿技術,可以替代傳統的人工觀測方法,有利于速度更快、效率更高、成本更低、操作更易、精度更高地開展架空輸電線路的施工。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
