基于特征匹配的變電站巡檢機器人設備識別
2022-02-08 12:32:38張云翔李智誠
工業加熱 2022年12期
張云翔,李智誠
(深圳供電局有限公司,廣東 深圳 518022)
變電站的運行以及維護[1]是保證電力系統穩定的基礎,是電力系統中最重要的工作,但利用人工對變電站進行巡檢會大概率出現變電站故障[2]遺漏的情況,而通過機器人巡檢可有效降低這種情況的發生率,機器人巡檢[3]可直接獲取設備圖像,進而減少因人員失誤帶來的誤差,同時可最大程度降低人員成本,目前機器人設備識別方法存在局限性,同時可靠性差,為進一步加強機器人對設備的識別能力,現對機器人設備識別技術展開研究。
劉小波[4]等人首先構建深度學習CRNN模型,粗略地對儀表數字區域進行第一次識別,其次綜合attention機制,將模型進行擴展處理,進一步對儀表設備進行識別,加強識別正確率,實現變電站巡檢機器人數字儀表設備識別。李全鵬[5]等人首先提取出儀表中的信息,并在中值濾波的基礎上完成信息去噪,其次對數據進行分割處理,最終在三次樣條插值法的基礎上分割出所有識別結果,并與固定閾值比較,生成最終識別結果,實現變電站巡檢機器人數字儀表設備識別。
以上兩種方法未對設備圖像進行定位處理,導致在實際識別過程中將其他部位的數值視為設備數值進行識別,存在設備識別準確率低、設備識別效果差和指針定位精度低的問題。為了解決上述方法中存在的問題,提出基于特征匹配的變電站巡檢機器人設備識別方法。
1 變電站設備圖像預處理
變電站利用機器人巡檢[6]后會直接獲取大量設備圖像,圖像中包含變電站相關數據,圖像的預處理[7]就是為了可以準確定位到圖像內的數字區域并對其進行去噪等處理提高設備數值識別精度,根據變電站的實際使用狀況對原始圖像進行降噪等預處理,得出數字區域的精確位置后將設備內數字進行分割,以此簡化數字特征匹配[8]和識別。
1.1 設備圖像定位
假設任意選取的兩幅設備圖像分別為Q1(x,y,t1)和Q2(x,y,t2),其中t1和t2分別是兩幅圖像的初始時間,機器人獲取的每幅圖像中均含有一個待識別跟蹤的對象,將其標記為l(xe,ye),其中(xe,ye)為質心坐標。
假設圖像Q1和Q2的質心分別為(xe1,ye2)和(xe2,ye2),e1和e2均表示圖像的相應坐標位置。
在實際定位過程中,首先將t1時刻的顏色信息進行轉換并保存到相應數據庫內,其次將t2時刻的顏色信息轉換成t1相同的形式,并與空間內的信息進行比較,排除相同顏色信息,完善顏色信息,最終在橢圓檢測方法下對各個顏色區域信息進行檢測,確定出目標對象質心位置(xe2,ye2)。
利用質心(xe2,ye2)得出目標對象的原始運動速度,其表達式為
(1)
式中:V為機器人對變電站巡檢時目標對象的原始運行速度,m/s;e1和e2為跟蹤目標的質心位置;Δt為時間的變化量,s。
進而得出目標對象在圖像中的最大運行速度為
(2)
式中:Vmax為目標對象在運行過程中的最大速率,m/s;ΔK為圖像的寬度,m;H為圖像的高度,m。
通過加權動態變化[9]確定目標圖像的位置確定,圖像的加權系數計算公式為
α1+i=‖Vmax‖×‖V‖
(3)
式中:α1+i為第1+i幅圖像的加權系數。
通過目標對象的原始運行速率以及加權公式即可確定出設備圖像顏色區域的位置,即確定出目標對象的實際位置,進而確定出設備圖像的位置定位。
機器人在巡檢過程中會因為外界因素的影響導致圖像帶有一定的噪聲以及陰影等,因此對目標圖像完成定位后需要進一步對圖像進行去噪以及圖像分割等處理,以此提高設備識別精度。
1.2 圖像分割、去噪以及二值化處理
為提取設備各區域特征,需對圖像進行分割處理[10],排除提取過程中的干擾因素,在分割過程中為降低分割難度可提前對圖像進行灰度化處理,在標準平均法的基礎上得出圖像的灰度值,其表達式為
m=0.30R+0.11B+0.59G
(4)
式中:m為圖像經灰度化處理后的灰度值;B、G和R均為圖像相應的顏色向量。
經過灰度化處理的圖像均帶有均一值,可通過灰度圖像二值化方法消除干擾因素,最終僅保留有用數據。
圖像的二值化處理實質就是在固定閾值的基礎上將圖像中的像素分類成黑色和白色兩種,由于電力系統的變電站常年在戶外,其周圍常年有其他異物的遮擋,而導致圖像的光照不均,在圖像中出現多塊陰影區域,而圖像的二值化剛好可以消除這種問題帶來的影響。
假設機器人巡檢儀器圖像的模板大小為(2n+1)×(2n+1),令該圖像質心坐標為(x,y),則圖像中各像素的相應閾值為
(5)
式中:R(x,y)為各像素點的二值化閾值;m(x,y)為質心的灰度值。
灰度圖像的二值化處理計算公式為
(6)
式中:U(x,y)為灰度圖像經過二值化處理后各像素的強度。
由于二值化處理未能對目標進行去噪,因此需要進一步細化圖像,即提取圖像特征,利用特征表達圖像,最終獲取到帶有像素寬度的線條圖像。在細化圖像的方法中,擊中/不擊中變換算法具有細化速度快和效果好的優點,從而選取該算法進行圖像的細化,該算法的核心思想就是在部分固定結構元素的基礎上不斷消除擊中變換的元素,從而消除目標對象的噪聲,以此完成圖像的細化處理。
假設隨機選取的待細化圖像為O,其補集為O′,圖像中的結構元素為P,P中包含P′和P″,三者之間的關系為
P=P′∪P″
(7)
式中:P′為圖像內部的結構元素;P″為圖像外部的結構元素。
其中,擊中擊不中變換算法的計算公式為
O×P=(OΘP′)∩(O′ΘP″)
(8)
式中:Θ為形態學腐蝕計算符號。
在結構元素P的基礎上將圖像O進行細化,其計算公式為
O?P=O-(O×P)
(9)
圖像O的細化實質就是刪除圖像O中被元素P擊中的元素,從而得到的圖像。
為方便運算,假設結構元素中有序列對,其表達式為
{P}={P1,P2…,Pi}
(10)
通過結構元素的序列完成圖像的細化,直到序列中的每種元素全部對圖像完成細化后停止細化,以此實現圖像的細化,則根據結構元素序列對圖像細化的計算公式為
O?{P}=(…((O?P1)?P2…)?Pn)
(11)
以此完成圖像的去噪以及灰度化處理,利用處理后的圖像在水平投影算法的幫助下完成圖像分割,進而完成圖像的預處理。
2 變電站巡檢機器人設備識別
在對設備識別[11]的過程中,Hough變換是機器人設備識別最常用的方法之一,其主要思想就是對定位出的圖像進行數值識別,其主要作用是將圖像中的圓以及直線等形狀完整且準確地提取出來,該算法的主要步驟就是通過映射圖像獲取共同特征以此生成以數個點構成的峰值,利用峰值對形狀進行監測進而完成分離。
此方法最關鍵的步驟就是得出目標形狀中心點的位置,由于設備中所有形狀均通過設備中心點,因此將設備中心視為所有形狀的中心,運用斜截式方程描述各個形狀,其公式為
y=cx+k
(12)
式中:(x,y)為中心點的坐標;c為橫坐標x的系數;k為線段的斜率。
在計算過程中必須保證所有形狀都通過中心點(x,y),將其利用公式進行表示為
k=-xc+y
(13)
在同心圓環搜索法[12]的基礎上對預處理后的圖像進行識別錄入,假設設備中指針的中心即為圓心,選取不同的半徑繪制出數個同心圓,并記錄各個同心圓和指針間的交點,計算出指針斜率后完成設備讀數。
假設在儀表盤中共得出3個同心圓,令三個同心圓與其相應指針的交點為D、F和G,在D、F和G三點間存在三組線段,分別為DF、FG和DG,其中D點坐標為(x1,y1)、F點坐標為(x2,y2)和G點坐標為(x3,y3),進而得出三個點相互之間線段的斜率,其表達式分別為
(14)
式中:k1為線段DF的斜率;k2為線段FG的斜率;k3為線段DG的斜率。
三個斜率的平均值表達式如式(15)所示:
(15)
而斜率的平均值又可用式(16)進行描述:
k=tanβ
(16)
式中:β為關于零度基準線的指針角度。
通過斜率的指針角度即可完成設備讀數。
在尺度空間極值的基礎上對讀數進行檢測,得出尺度空間以及二維圖像空間的極值,并利用擬合三維二次函數精確得出數字點的位置和尺度,進而得出數值的特征向量。
由于經過預處理后的圖像僅含有黑色和白色兩種像素,由于經過分割處理后的圖像更簡潔明了,為進一步提高數值讀取精度,根據設備特點,將分割后的圖像進行歸一化處理可降低小數點對結果帶來的影響,經總結得出數字圖像的相關公式為
(17)
式中:Z(s)為實際讀數與真實數值之間的差異;M為每個像素對應的歸一化矩陣。
由于實際讀數與真實數值之間成反比,因此,當Z(s)數值越大,即證明讀數越準確。
將計算出的特征向量利用式(17)進行匹配,得出數值最大的前兩個關鍵點,當兩點之間的比小于固定閾值,則接收特征匹配點,以此類推,不斷得出樣本匹配點,即可完成設備的精確識別。
將最終結果進行記錄,并將其保存到數據庫內,以便工作人員獲取最詳細的變電站巡檢結果。
3 實驗結果與分析
為了驗證基于特征匹配的變電站巡檢機器人設備識別方法的整體有效性,現對所提方法、文獻[4]方法和文獻[5]方法進行設備識別準確率、設備識別效果和指針定位精度的測試。
3.1 儀表設備識別準確率
變電站巡檢機器人主要作用就是快速準確獲取變電站的相關數據,并準確識別儀表設備中的結果,為得出最優識別方法,可將識別結果的準確性視為檢測指標。
在相同環境下利用三種方法對任意十組儀表設備進行識別,記錄其識別準確率,并將三種方法的結果進行比較,得出最優方法,其結果如表1所示。
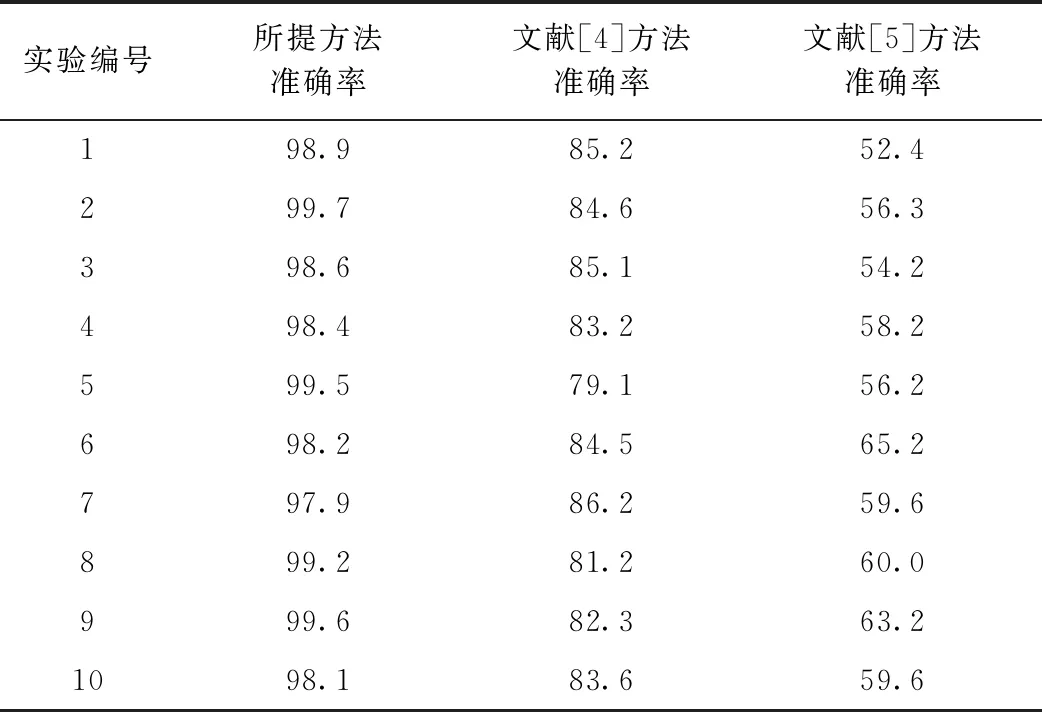
表1 三種方法的儀表設備識別準確率 %
將表1中的結果進行比較后發現,任何實驗下均是所提方法的結果準確率最高,文獻[4]方法的準確率較所提方法較差,但該方法仍有可取之處,而文獻[5]方法的結果實在差強人意,其準確率過于低,所提方法之所以能保證儀表設備識別準確率高是因為在儀表設備識別前對儀表設備圖像進行定位處理,縮小識別范圍,排除識別干擾因素,降低錯誤識別的概率,提高識別精度,以此提高識別準確率。
3.2 儀表設備識別效果
儀表設備識別過程中為降低圖像顏色等影響會對其進行灰度化處理,灰度化處理后的圖像會在一定程度上增強識別效果,因此可通過對比儀表設備識別效果得出最優識別方法。
在電力系統中隨機采集一張儀表設備圖像,對比在正常光照下的儀表設備識別效果,其結果如圖1所示。
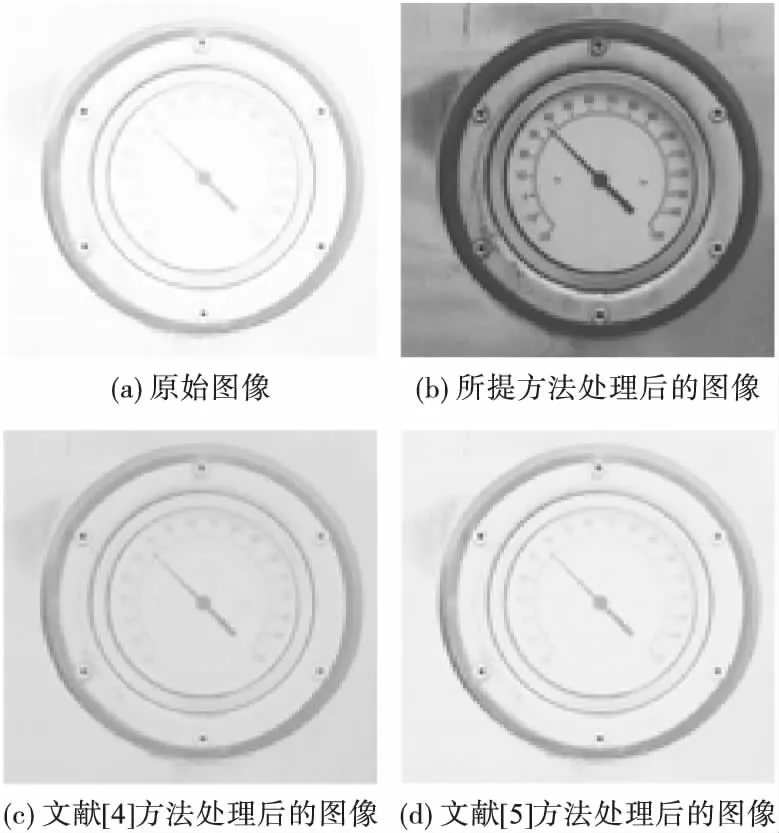
圖1 三種方法在正常光照下對圖像的識別效果
根據圖1可知,由于外界光照影響,原始圖像出現過度曝光的問題,經過三種方法處理后均有所改善,可有效看出其中數值,但只有所提方法的數值識別最明顯,由此可得出所提方法為最優儀表設備識別方法。
為進一步驗證所提方法的優越性,在反光條件下測試對比三種方法的實驗結果如圖2所示。
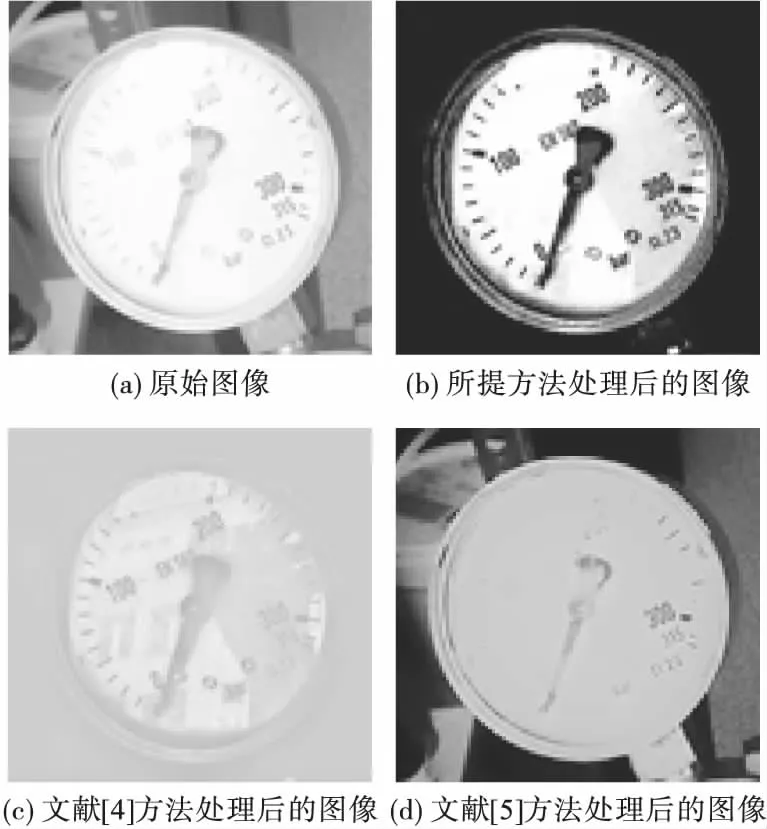
圖2 不同方法下反光狀態下的圖像識別效果
將圖2中各個方法的識別效果進行對比,仍是所提方法的識別效果最佳,因此證明所提方法是真實有效的最優識別方法。
3.3 儀表設備指針定位精度
在對儀表設備識別的過程中,最關鍵的步驟就是指針的定位,不同方法對指針的定位也不盡相同,但指針定位的精確度要求嚴格,稍有偏差就會導致結果出現誤差,利用三種方法對同一儀表盤的指針進行定位,定位結果如圖3所示。
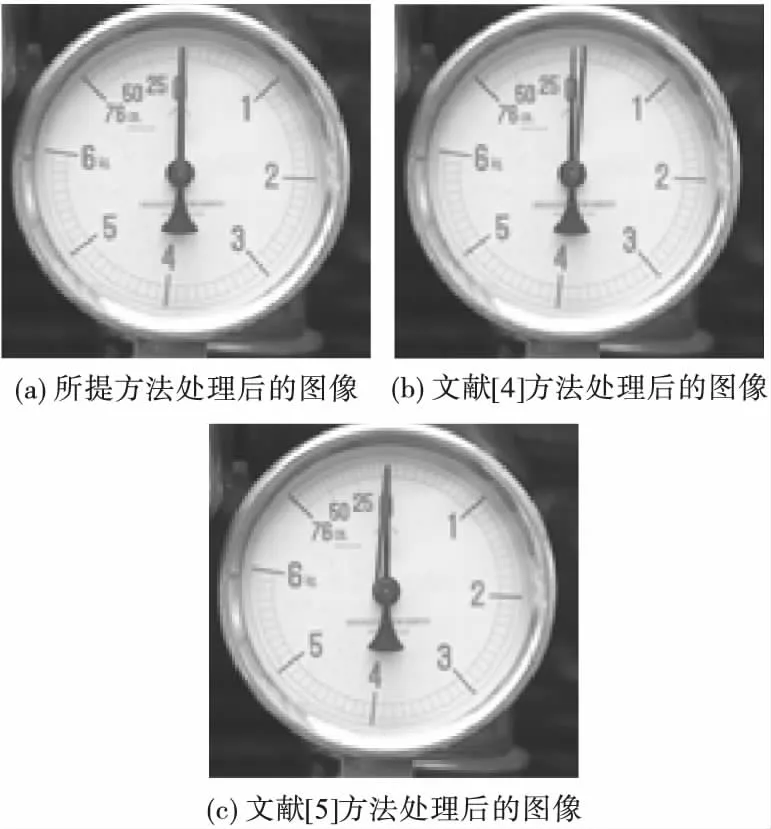
圖3 三種方法的儀表設備指針定位結果
根據結果顯示,所提方法可有效定位指針的中心位置和斜率,因此其定位結果與真實指針位置完全重合,而其余兩種方法在定位過程中僅能準確定位指針一端,無法精確定位指針位置,所以最優識別方法為所提方法。
4 結 語
利用機器人進行設備識別可有效降低人工成本,而通過特征匹配更能提高識別精度,經研究發現,機器人在采集設備圖像信息過程中會出現讀數不準確等問題,為解決這一系列問題,提出基于特征匹配的變電站巡檢機器人設備識別方法,該方法首先對讀數圖像進行預處理,其次在Hough變換算法下得出指針定位,生成讀數結果并錄入,實現變電站巡檢機器人設備識別,解決了設備識別準確率低、設備識別效果差和指針定位精度低的問題,加強變電站安全性。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
河南電力(2015年5期)2015-06-08 06:01:45
小雪花·成長指南(2015年4期)2015-05-19 14:47:56