基于模糊邏輯的下肢髖關節外骨骼步態劃分方法
2022-02-09 07:27:00譚明航吳欽木
智能計算機與應用 2022年12期
關鍵詞:方法
譚明航,吳欽木
(貴州大學 電氣工程學院,貴陽 550025)
0 引言
近年來,生活節奏在不斷加快,使得腦卒中、類風濕性關節炎及交通事故等造成下肢運動功能障礙的人群也在增多。隨著科學技術的發展,下肢外骨骼機器人的出現幫助患者進行康復訓練,克服了傳統人工康復訓練效率低、康復慢的缺點,為下肢運動功能障礙人群帶來了福音[1]。
下肢外骨骼機器人主要是通過步態劃分結果,確定關節電機輸出力矩的時刻點,從而起到輔助人體下肢運動的作用,因此如何設計下肢外骨骼機器人的步態劃分方法直接關系到康復訓練的效果[2]。國內外眾多學者和科研人員提出了不同的步態劃分方法。擬做闡釋分述如下。
(1)IMU 檢測角度或加速度信息。Jang 等人[3]建立了外骨骼髖關節和膝關節在不同運動過程中的角度與加速度信息關系,并以角度曲線的特定峰值來進行步態劃分。
(2)FSR 檢測足底壓力信息。為了提高步態劃分的準確性,Hyun 等人[4]構建了以足底壓力變化量來劃分步態相位的方法,并利用足底壓力的特點通過閾值來確定步態所處的階段。Kim 等人[5]、Qi 等人[6]設計了一種基于足底壓力和下肢角速度的步態劃分器,該步態劃分器通過角速度調整人體與外骨骼的閾值參數。
(3)無線超聲波檢測足部位移。Fan 等人[7]利用無線超聲波傳感器,通過建立遞歸牛頓-高斯方法來定位步態階段。上述利用傳感器數據進行步態劃分的方法在行走的過程中能發揮一定作用,但其魯棒性差,容易受外界因素干擾,導致步態劃分效果不佳。
綜上所述,基于傳感器的步態劃分方法具有一定的優勢,并不需要建立精準的下肢外骨骼機器人動力學模型[8-9],不依賴EMG 生物肌電信號[10],以傳感器的特征來標定步態階段。然而單一的傳感器信息可能無法準確地劃分步態,因此本文為了提高步態劃分的精準性與魯棒性,設計了一種基于模糊邏輯的下肢髖關節外骨骼步態相位劃分方法,該方法實現了行走過程中每個步態相位估計的準確性,提高了人機協調性。
1 基于模糊邏輯的下肢髖關節外骨骼步態劃分原理
本文所提出的基于模糊邏輯的下肢髖關節外骨骼步態劃分方法的架構如圖1 所示。主要分為感知層、決策與控制層和執行層三個部分。其中,感知層有一階低通濾波器、步態相位劃分器,決策與控制層包括自適應振蕩器及力矩發生器。
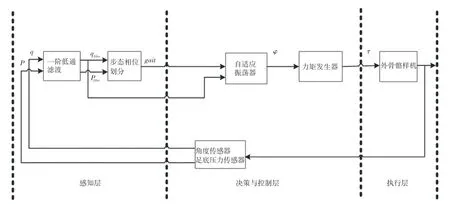
圖1 基于模糊邏輯的下肢髖關節外骨骼步態劃分步態相位劃分方法架構圖Fig. 1 Gait phase division method structure diagram of lower limb hip joint exoskeleton gait classification based on fuzzy logic
1.1 一階低通濾波器
相較于其它低通濾波算法,一階低通濾波算法待調節的參數少,運算量小,易于軟件實現和快速處理,是實時性強的濾波算法。因此采用該濾波器對髖關節角度數據和足底壓力數據進行濾波預處理,濾波器輸出為:

其中,Y(n) 為本次濾波結果;a為濾波系數;X(n) 為采樣值;Y(n -1) 為上次濾波結果。
1.2 步態周期劃分器
人體行走過程是一種類周期性運動,每條腿的動作總是表現為向前邁出與收回,循環往復,可以通過傳感器檢測行走過程中重復特征事件信息的方法,達到區分每個步態周期的目的。例如IMU 檢測角度或加速度、壓力感應電阻(Force sensing resister,FSR)檢測足底壓力等。由于人體下肢擺動存在抖動,導致髖關節角度曲線可能存在多個局部峰谷,單獨使用IMU來劃分每個步態周期,其準確度會受到影響。考慮到人體步行過程中,足部活動主要為腳跟撞擊、腳趾支撐、腳趾離地以及足部完全懸空四個部分[8],腳跟和腳趾部位的壓力大小會隨著行走步態階段的發展而呈現明顯的規律性變化,因此,本文結合髖關節角度曲線局部峰谷與足底壓力二者的特點,設計了一種模糊邏輯規則來進行每個步態周期的實時在線劃分。
本文選擇采樣頻率為1 000 Hz 的IMU 來進行髖關節角度數據采集,定義采集到的髖關節角度和髖關節角速度分別為q和,經一階低通濾波后的髖關節角度為qfilter。
將濾波預處理后的髖關節角度qfilter進行歸一化處理,需用到的公式為:
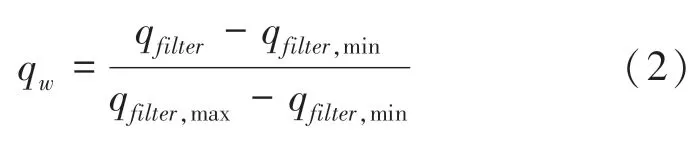
其中,qfilter,min、qfilter,max分別為濾波預處理后的髖關節角度最小值和最大值,qw為經歸一化處理后的髖關節角度。
取滑動窗口序列:

其中,n為奇數,且滿足n∈ (0,100) 。
則髖關節角度曲線局部峰谷情況可由下列公式判定:
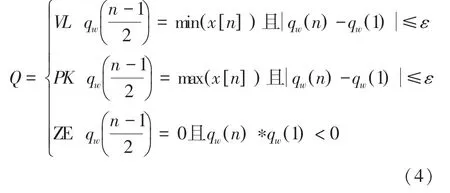
其中,VL為波谷;PK為波峰;ZE為過零點;min表示求最小值函數;max 表示求最大值函數;ε為一個正的極小值。
本文選擇采樣頻率為100 Hz 的扁平式壓力傳感器來測量足底壓力情況,并將傳感器分別嵌入到鞋子的腳掌和腳跟兩個部位,如圖2 所示。圖2 中,a為腳掌壓力傳感器,b為腳跟壓力傳感器,c為CAN數據傳輸線。
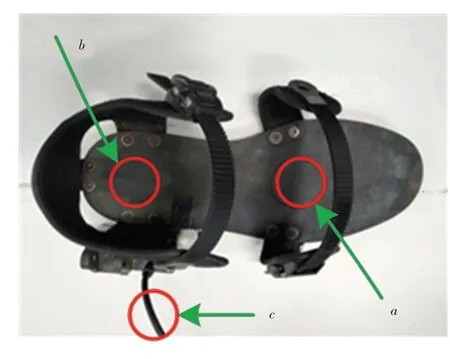
圖2 足底壓力傳感器分布圖Fig. 2 The profile of the plantar pressure sensors
為了更好地描述足底壓力變化,將采集到的實時足底壓力數據進行歸一化處理,具體公式如下:

其中,i =1,2 表示腳掌和腳跟;Ps,i為足底壓力傳感器實時測得的壓力值;Psmin,i、Psmax,i分別為足底壓力傳感器測得的壓力最小值和最大值;Pi為經歸一化處理后的足底壓力。
依據式(3)、式(4),以髖關節角速度、qw為經歸一化處理后的髖關節角度和足底壓力差作為輸入變量,經過研究定制的步態相位推理規則(GPIR),輸出步態劃分結果。
在式(3)、式(4)的基礎上,本文構建了模糊邏輯推理系統(FIS),如圖3 所示。對于髖關節角度輸入變量,定義了3 個隸屬函數:LOW-低、MID-中、HIGH -高,對于足底壓力輸入變量,定義了5 個隸屬函數:L -小、M -中等、PH -較高、H -高、VH -極高,對于步態周期劃分輸出變量:IW -初始擺動相,FW-完全擺動相,IS-初始支撐相,FS-完全支撐相,得到的模糊邏輯規則,見表1。
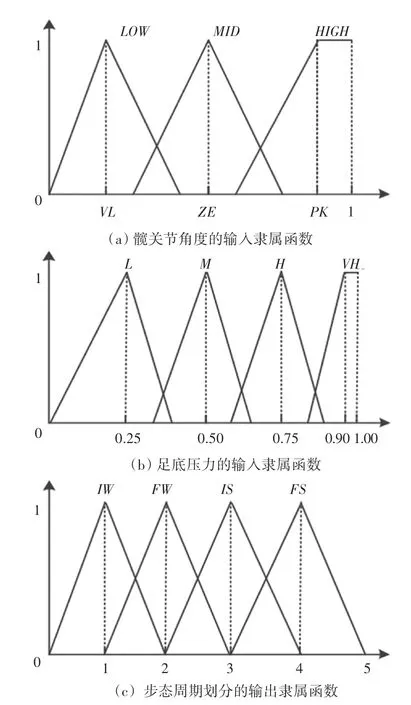
圖3 步態周期劃分模糊邏輯推理系統Fig. 3 Fuzzy logic deduction diagram of gait stages division
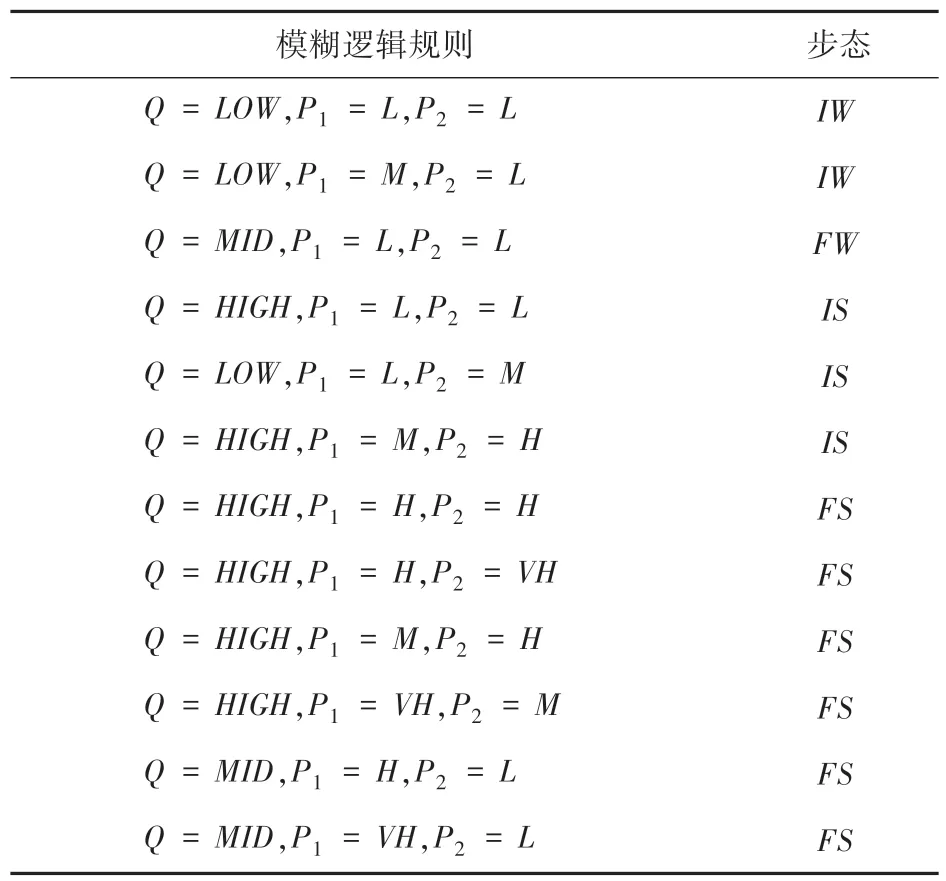
表1 模糊邏輯規則表Tab.1 Fuzzy logic rules table
2 外骨骼機器人樣機平臺
本文的下肢髖關節外骨骼機器人樣機平臺如圖4 所示。外骨骼樣機控制系統基于ARM Cortex-M7架構芯片STM32F765IIK6。髖關節電機選用額定輸出扭矩為45 N·m 的BLDC 直流無刷電機,電機FOC 驅動器額定功率為480 W,采用增量式編碼器來獲得關節電機轉子機械角度。IMU 為維特智能公司生產的九軸陀螺儀,型號為JY931。
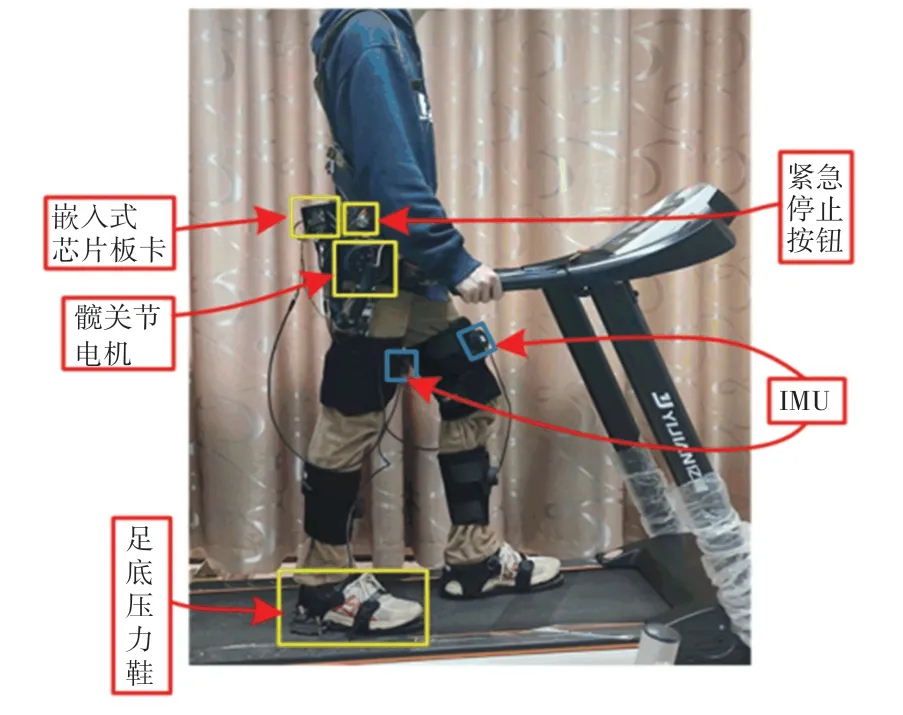
圖4 下肢髖關節外骨骼機器人樣機Fig. 4 Lower limb hip joint exoskeleton robot prototype
外骨骼樣機系統開啟電源后,所有傳感器(髖關節IMU 傳感器、足底壓力傳感器)數據、步態周期劃分數據等都會記錄在16 GB 容量的TF 卡中,以便于后續實驗驗證與數據分析對比。
3 實驗驗證及結果分析
3.1 實驗設計
招募受試者一名(年齡22 歲、身高175 cm、體重72 kg),受試者穿戴外骨骼機器人樣機在跑步機上以預先設定好的速度規則進行行走,共收集了來自該名受試者的10 組行走數據。表2 是收集到的不同速度階段的10 組實驗樣本數據集。

表2 各組樣本不同速度階段數據采樣點數及步態周期總數Tab.2 Data points and gait cycles number of different speed stages in each groups of samples
3.2 相位劃分器實驗結果分析
前文1.2 節中相位劃分器部分提出了依據髖關節角度局部峰谷情況和經過閾值條件判定后的足底壓力情況的模糊推演邏輯規則,本文將該方法簡稱為GPF 方法。
GPF 步態劃分方法將一個步態周期分成了4 個階段,如圖5 所示。圖5 中,“階梯狀”的線代表了GPF 劃分的步態階段,當“階梯狀”的線值縱坐標為1 時表示當前步態階段處于初始搖擺相、為2 時表示處于完全搖擺相、為3 時表示處于初始支撐相、為4 時表示處于完全支撐相。
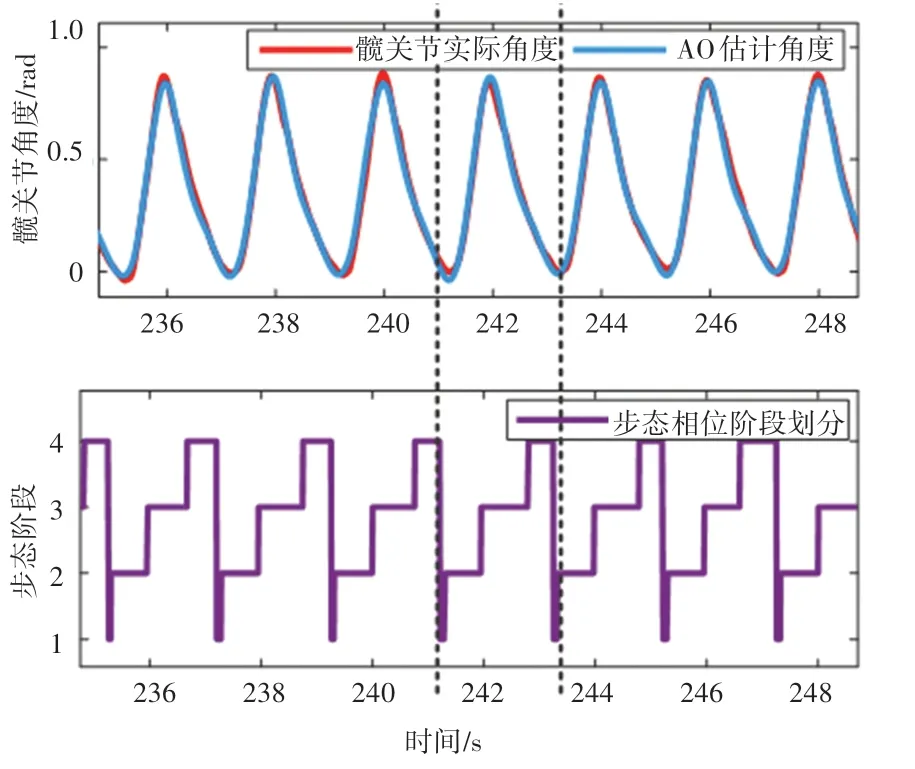
圖5 GPF 方法步態階段劃分情況圖Fig. 5 GPF method gait stages division situation diagram
為了驗證GPF 方法對步態相位劃分的準確度,首先,定義每組測試樣本各周期內的相位階段劃分正確率ERO作為步態相位階段劃分準確度評價標準一,數學定義公式見下式:

其中,Ω為實驗一各組樣本每個步態周期內相位階段劃分正確的采樣點數,U為實驗一各組樣本每個步態周期內采樣總點數。
其次,定義實驗一M組樣本的平均相位階段劃分正確率AERO作為評價標準二,數學定義公式見下式:

其中,由于實驗一進行了10 組測試,因此M =10;i表示測試樣本組別號;j表示各組測試樣本步態周期序號;V表示各組測試樣本步態周期總數。
步態階段劃分ERO結果見表3,各組樣本步態階段劃分ERO誤差棒如圖6 所示。
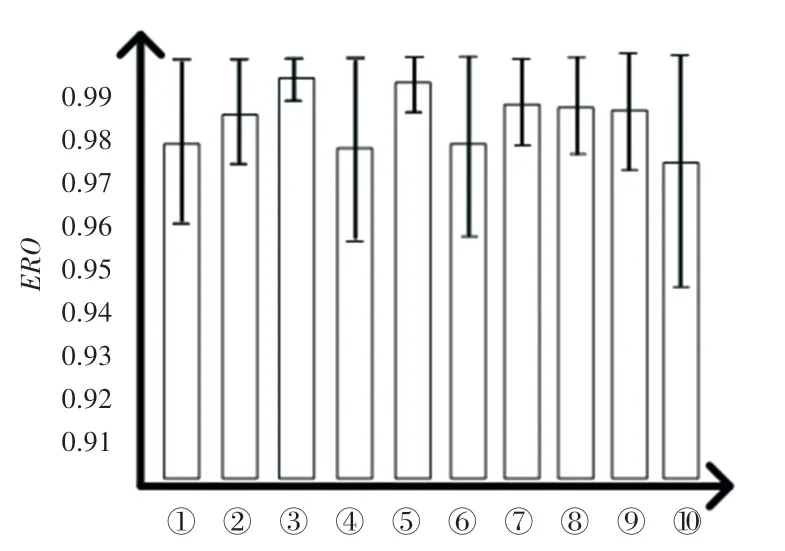
圖6 各組樣本步態階段劃分ERO 誤差棒Fig. 6 ERO error bars for gait stages division of each group of samples
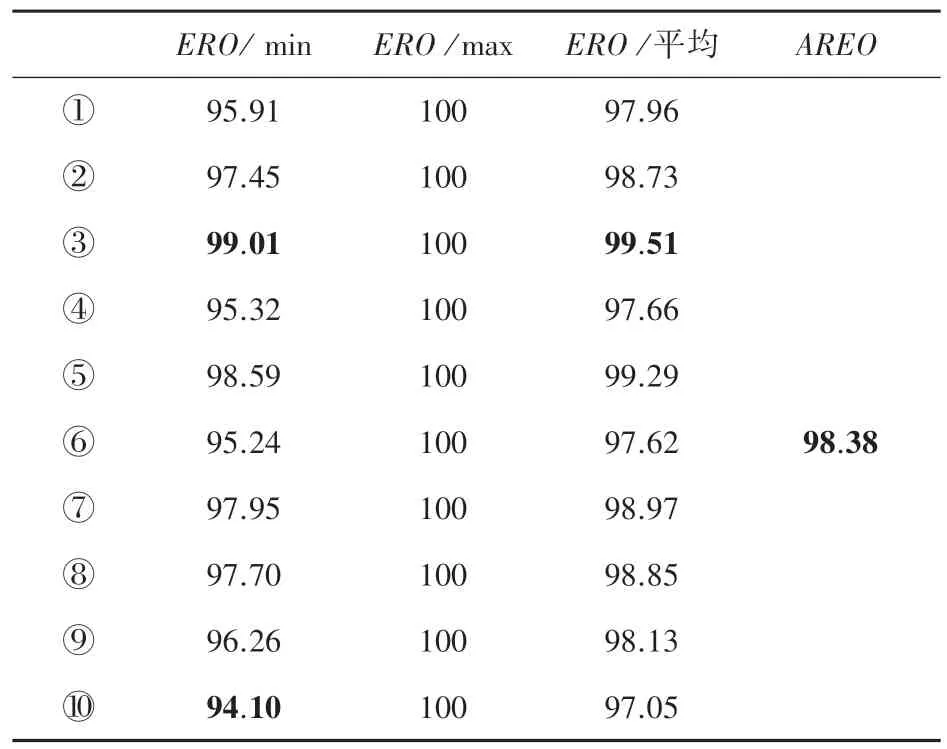
表3 步態階段劃分ERO 結果Tab.3 Results of gait stages division ERO %
根據表3 和圖6 中數據分析可知,第③組樣本最小ERO為99.01%,最大ERO為100%,平均ERO為99.51%,該組測試結果在全部10 組測試中的步態劃分準確率最高,除了第⑩組樣本,其他組樣本ERO均在95%以上,平均ERO在97%以上。第⑩組樣本出現了最低ERO(94.10%)的原因是由于該組實驗數據某階段步態周期內受試者不小心阻礙了外骨骼動作,導致該步態幅度過小,角度峰谷與足底壓力情況在支撐相階段不明顯,影響了GPF 方法對該步態周期內支撐相階段的劃分,然而在實際穿戴外骨骼進行助力行走的過程中,不會發生多段該種步態情況,除非外骨骼穿戴者人為刻意阻礙外骨骼動作。縱觀全部10 組樣本數據,從整體步態階段劃分效果來看,AERO結果為98.38%,AERO越高,GPF 對步態劃分的效果越好。因此,本文提出的GPF 方法在步態階段識別上具有較高的準確性,并且GPF 方法復雜度不高,相比其它神經網絡方法更利于嵌入式微控制器程序的實現。
4 結束語
針對下肢運動功能障礙人群的康復訓練,本文提出了一種基于模糊邏輯的下肢髖關節外骨骼步態相位劃分方法。根據髖關節角度與足底壓力數據相結合的模糊邏輯推演來精準劃分每個步態周期,并記錄每個步態周期初始擺動相時刻。為了證明所提出的基于模糊邏輯的下肢髖關節外骨骼步態相位劃分方法的有效性及優越性,設計了跑步機行走實驗,并進行了步態階段劃分準確度分析,實驗結果表明基于模糊邏輯的下肢髖關節外骨骼步態相位劃分方法具有準確的步態階段劃分能力以及更好的步態自適應協調性能。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56