基于激光雷達的機房可視化預警系統研究
2022-02-13 11:48:51陳健錢星橋
機電信息 2022年3期
陳健 錢星橋




摘要:變電站機房目前使用的視頻監控裝置缺少自動識別、主動監測的功能,導致工作人員在機房內作業時誤入屏位誤操作的事件時有發生,嚴重影響通信網絡的穩定性。鑒于此,搭建了基于激光雷達的機房可視化預警系統,實現對機房內人員作業位置的自動感知,同時能實時分析移動軌跡,對誤操作快速進行預警,防范機房設備安全風險。
關鍵詞:安全風險;激光雷達;機房可視化;自動預警
中圖分類號:TN958.98;TM63? 文獻標志碼:A? 文章編號:1671-0797(2022)03-0028-04
DOI:10.19514/j.cnki.cn32-1628/tm.2022.03.008
0? ? 引言
隨著我國信息化進程的快速推進,關鍵信息基礎設施作為事關國家安全和社會穩定的重要戰略資源的地位日益凸顯。為了更好地應對威脅關鍵信息基礎設施的網絡入侵和網絡攻擊事件,貫徹落實《中華人民共和國網絡安全法》中關于提升關鍵信息基礎設施保護的要求,信息網絡的關鍵信息基礎設施需要建立全面的監測預警機制,實現“全天候、全方位”感知網絡安全態勢,變被動防護為主動監測與積極防御。
根據往年變電站的網絡安全工作,發現部分機房內作業人員因工作經驗不足等原因,不僅未按工作計劃到相應屏位進行作業,還誤入其他機柜對在運行設備進行開關、測試等誤操作,嚴重影響通信網絡的安全穩定性。
目前變電站視頻監控的人機交互性差,只能被動監視,缺乏分析處理能力,不具備主動告警功能,無法協助運維人員在第一時間對機房設備誤操作進行響應。為此,搭建了一種基于激光雷達的機房可視化預警系統,該系統可用于變電站機房可視化展示和監控,通過動態、實時的智能化數據軌跡分析,對人員進出屏位作業、機房環境變動實現響應告警,提高管理人員對機房情況的響應速度,有利于保障設備安全,防范網絡風險,實現機房運維智能化。
1? ? 基于激光雷達的機房可視化預警系統簡介及優勢
使用基于激光雷達的機房可視化預警系統,可實現對機房內計劃作業范圍的掃描測繪,同時自動識別人員進出作業、機房環境變動,通過高覆蓋率、高精確度、高動態化、高實時性的圖像采集和分析處理,生成響應告警,高效應對突發情況,實現機房運維智能化。
1.1? ? 智能識別定位
激光雷達及UWB定位設備結合使用,可對進入監控范圍的作業人員進行自動化識別及定位,精確度高,可靠性強;能自動智能核查感知環境變化,及時發現人員在機房內作業誤入屏位誤操作情況;無須人工操作,能克服目前人工核查視頻監控低效和不完整的問題。
1.2? ? 實時射線判斷
基于射線算法,對人員實時定位及預設電子圍欄等坐標信息進行快速處理,第一時間偵測出人員定位超出計劃作業范圍的情況。
1.3? ? 設備風險預警
實時監測基于射線法判斷結果,結合激光雷達所探測畫面,實現實時風險評估、風險態勢可視化展示、風險數據管理,當實時風險值大于閾值時,通過多種方式快速告警,以便及時處理設備風險。
2? ? 基于激光雷達的機房可視化預警系統的設計與實現
2.1? ? 體系結構
本系統按其功能可分為Web操作層和設備讀取層。其中,Web操作層為用戶交互層,采用B/S架構開發,用戶通過瀏覽器直接訪問系統進行相關操作;設備讀取層為設備交互層,通過串口連接UWB定位設備,并持續獲取定位信息,判斷位置與圍欄關系,進行數據處理入庫。
Web操作層前端采用jQuery作為js組件庫,Bootstrap作為界面庫進行界面和前端邏輯開發,后端采用Python語言和flask庫進行開發;設備讀取層采用Python語言開發,用pyserial庫控制物理串口;系統采用MongoDB作為存儲數據庫,驅動高并發數據讀寫。
系統總體架構如表1所示。
本文設計的基于激光雷達的機房可視化預警系統可分為系統接口、功能模塊和操作及管理界面三大部分,架構圖如圖1所示。
(1)系統接口:提供基于激光雷達的機房可視化預警系統與網管系統服務器及工作站系統間接口[1],傳輸預警信號。
(2)功能模塊:包括底圖管理、場景管理、定位數據管理、硬件交互管理4個模塊。
(3)操作及管理界面:通過操作及管理界面完成4個功能模塊的信息展示和運維操作,實現檢查終端硬件信息和系統狀態等功能。
全界面圖管理如圖2所示,主要功能為維護位置展示的底層背景圖像。該模塊按照實際的物理環境繪制或拍攝平面圖,按照一定的比例導入平臺,平臺自動識別圖片分辨率、長度與寬度,計算實際大小,并維護保存和展示。
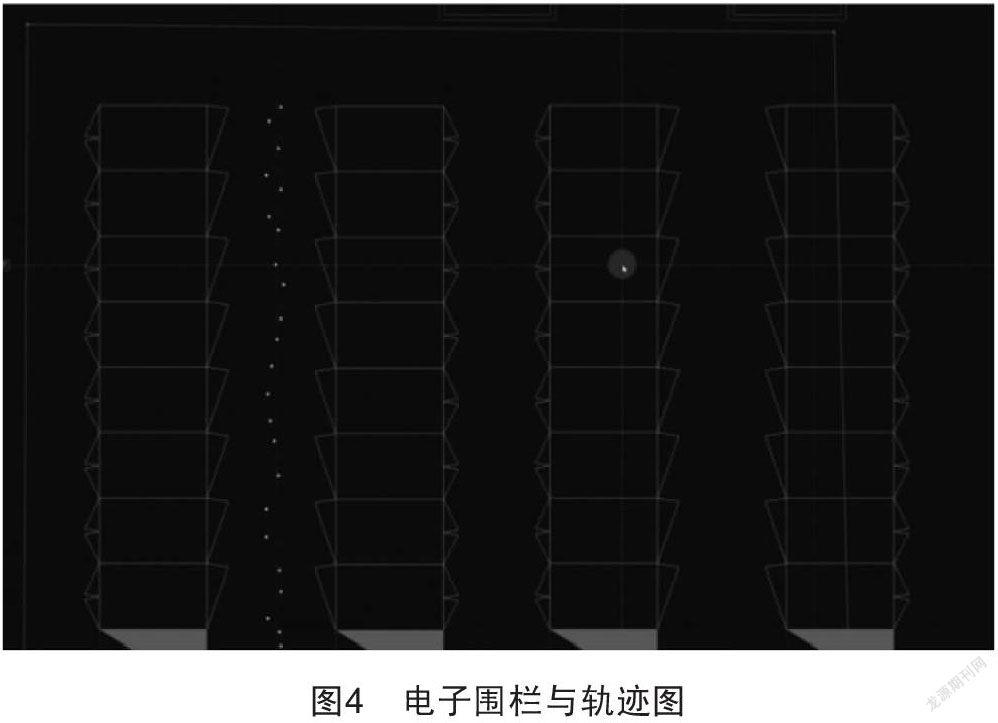
場景管理如圖3所示,主要功能為將實際需要建模或巡視的物理場所、基準點、圍欄坐標等進行數據關聯,建立平臺可視化場景,并以此為基礎進行實時位置展示。
該模塊通過預配置的基準位置、定位標簽信息,簡單拖放的電子圍欄操作,實時按真實坐標展示的點位軌跡,電子圍欄清晰可見的區分和告警展示,為整個系統提供了完善的交互和統計功能。
定位數據如圖4所示,主要功能為定位數據存儲、快速搜索和統計,包含是否位于圍欄內的實時判斷結果。
硬件交互如圖5所示。通過物理串口訪問UWB定位基站設備[2],發送循環定位獲取指令,實時獲取定位信息,并通過射線算法計算定位是否位于電子圍欄內,將結果全部存入數據庫。
2.2? ? 軟件的實現
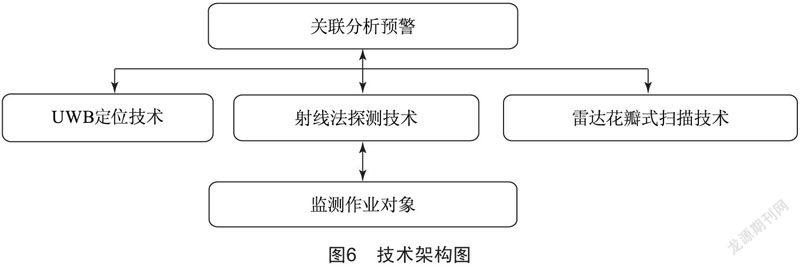
技術架構圖如圖6所示。對進入監測范圍的監測對象進行快速識別定位,自動建立監測對象與系統內定位點坐標的對應關系[3],并對超出預設電子圍欄范圍的定位發出預警。對監測范圍同時進行可視化管理,對人員進出屏位作業、機房環境變動等情況進行實時追蹤,并動態化計算風險態勢,追蹤風險行為,及時發現風險動作。
3? ? 成果展示
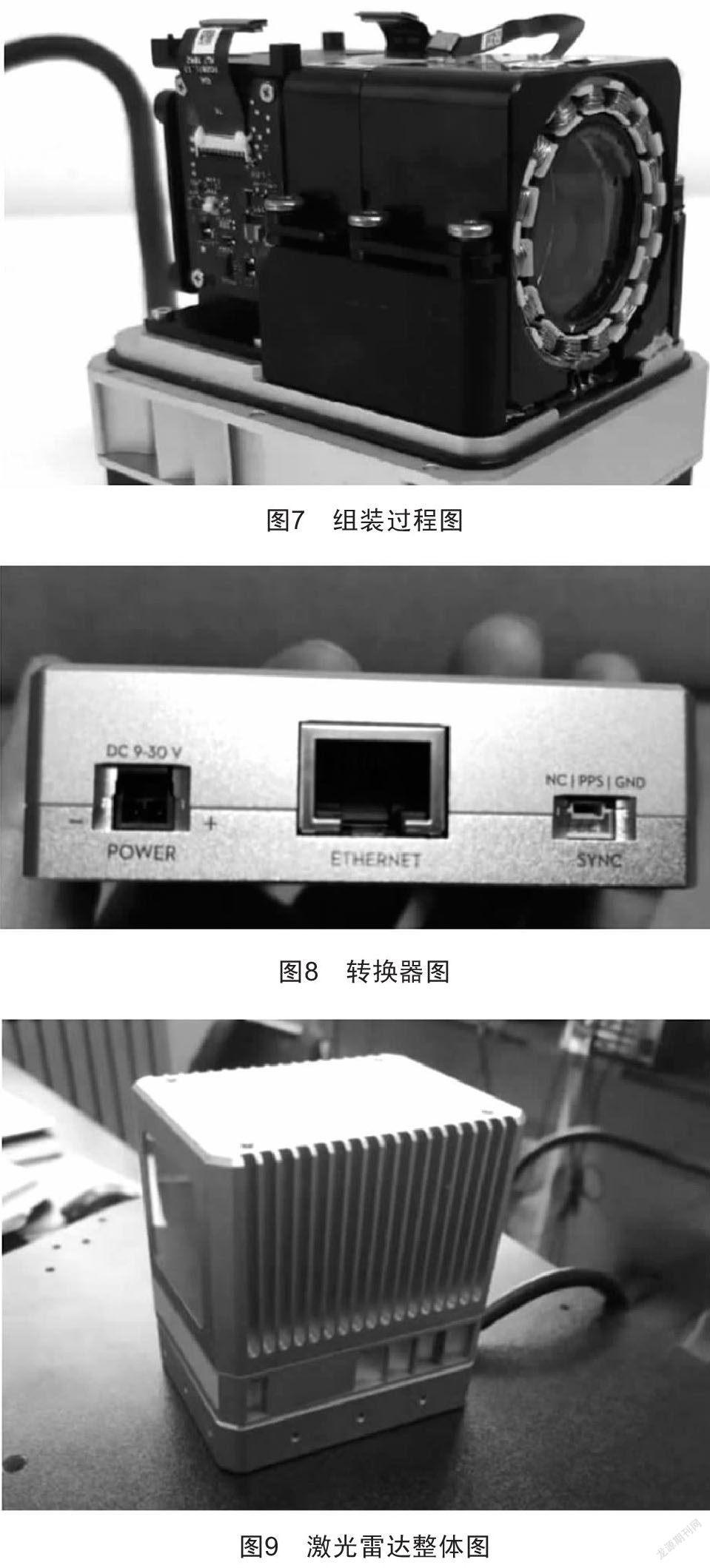
本硬件系統共包括4個模塊:光束操縱模塊、成像模塊、預警模塊和激光測距模塊。
根據設計組件進行激光雷達監控系統的組裝:
(1)首先對雷達本體進行組裝,組裝過程圖如圖7所示。
(2)將雷達連接到轉換器,轉換器如圖8所示。
(3)使用以太網電纜將計算機和轉換器連接到路由器,再將轉換器連接到外部電源,完成組裝。激光雷達整體圖如圖9所示。
4? ? 結語
本文設計的基于激光雷達的機房可視化預警系統投入使用后,運維人員能夠通過該系統及時掌握變電站機房內作業設備風險情況;同時,智能化監控能力的提升,使運維人員的作業更能滿足機房監控需求,還能避免人力、物力資源的浪費,滿足可持續發展要求,堵塞作業漏洞,最終實現通信設備安全及網絡穩定,防范安全風險。
[參考文獻]
[1] 祖琪,王丹,高明華,等.基于激光雷達的巡檢機器人導航系統研究[J].電子測試,2018(22):32-33.
[2] 鄧凱,任志敏.基于UWB技術的室內外一體定位系統設計[J].山西電子技術,2020(1):61-64.
[3] 陳旻哲,熊誠,劉守印.基于UWB的室內停車場高精度定位系統設計[J].單片機與嵌入式系統應用,2018,18(4):32-38.
收稿日期:2021-11-30
作者簡介:陳健(1986—),男,廣東清遠人,碩士研究生,高級工程師,研究方向:電力通信。
錢星橋(1998—),男,廣東珠海人,助理工程師,研究方向:電力通信。
