風電場點云數據分類方法研究
2022-02-13 04:29:09李志偉陳聯鵬江堯堯
科學技術創新 2022年36期
李志偉,陳聯鵬,江堯堯,張 升
(1.中國電建集團江西省水電工程局有限公司,江西 南昌 330096;2.南昌大學工程建設學院,江西 南昌 330031)
引言
近年來,隨著我國風電事業蓬勃發展,傳統數字攝影測量方法已無法滿足實際風電場建設項目中地形圖繪制、信息收集、規劃等工作的精度和效率。無人機LiDAR 點云數據精度高、采集效率快,可以滿足風電場建設項目要求。點云分類是點云數據處理中的關鍵一環,傳統風電場點云數據分類效率低、人工干預大,直接影響風電場項目各項工作的進度及數據的準確性。故而亟需一種高效、準確、適用性強的風電場點云數據分類方法。
目前風電場點云數據常用的地面點分類方法[1],有基于分割類算法[2-3]和坡度的分類算法[4],但計算量大、內存占用率高。形態類分類方法[5],對地勢起伏較大地形適用性低。常見的非地面點云數據分類方法,如DBSCAN 算法[6-8]利用密度聚類,且聚類速度快、適用性高,但聚類結果受算法中Eps 和MinPts 兩個核心參數影響大,兩參數需要人為擬定。對此Yue 等[9]提出一種快速確定Eps 參數的算法,但算法MinPts 參數恒定取值為4。周治平等[10]提出AF-DBSCAN 算法,自適應確定了兩參數,但聚類結果偶然因素更多。Khan 等[11]提出的AD-DBSCAN 自適應聚類算法也無法自動識別簇數,需提前給定。李宗林等[12]提出(Kernel-DBSCAN)可通過數據的分布特征來確定兩個參數,但僅在一維上有效,高維度聚類效果差。由李文杰等人提出的KANN-DBSCAN 算法[13],基于自身特征自動確定最優Eps 和MinPts,聚類分類結果準確性較高,但僅運行于二維少量點數據聚類實驗。
綜上,本研究利用基于不規則三角網加密濾波算法[14]提取風電場原始點云數據中的地面點及非地面點,使用三維KANN-DBSCAN 算法對非地面點進行精分類,采用South LiDAR 軟件在地面點云中分類道路點,實現風電場點云數據高效、準確分類。
1 方法綜述
風電場點云數據是利用三維激光LiDAR,對地表進行掃描得到的三維數據,主要分為兩大類:
(1) 地面點云,包含裸地表面、道路等點。
(2) 非地面點云,包括建筑物、密林植被、高壓或民用電線等點。
本研究將去噪后的原始數據分為地面點和非地面點。并進一步分類非地面、地面點點云中的植被、建筑、道路點云等點云。形成一套完整風電場點云數據處理方法路線,路線圖見圖1,本研究方法大幅提高風電場點云數據分類精度和效率。
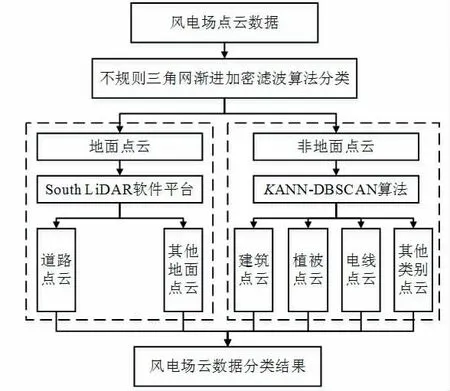
圖1 風電場點云數據處理方法路線
廟墩中學前段數據面積36 881.662 m2,數據中共包含40 419 351 個點云對象,下文具體分析,以廟墩中學前段數據為例:
1.1 風電場地面點云數據分類
不規則三角網加密濾波算法對地面點分類,實現步驟如下:
(1) 首先選擇低點建立初始三角網模型。
(2) 利用算法持續加入新的點向上擴建模型,使其與地表模型更加吻合。
(3) 數據點納入三角網需滿足兩個閾值,為反復參數迭代角和迭代距離。新激光點連接與其距離最小的三角形頂點成線,該線與對應三角形所處平面的最大角度,稱為迭代角。隨著迭代角的減小,點云起伏變化的幅度也減小,意味著迭代角與地面點數量成正比。迭代距離在三角形較大時,可以避免在三角形向上構建的情況下出現劇烈的波動甚至大的跳躍等狀況;在三角形較小時,由于迭代距離,迭代角度隨之迭代減小,可以避免地面點云出現過多的無用點云數據。當三角形邊短于一個給定值,則迭代停止。兩個參數的定義見圖2。
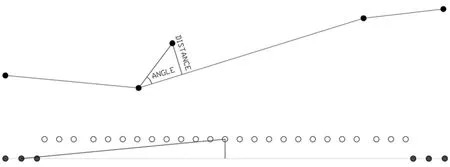
圖2 反復參數的定義示意
根據如上步驟即可實現地面點與非地面點的快速分類。使用不規則三角網加密濾波算法分類后的廟墩中學前段地面點云及非地面點云數據,其中包含36 456 736 個地面點和3 958 332 個非地面點。
1.2 風電場非地面點云、地面點云數據精分類
本研究針對非地面點基于KANN-DBCSCAN 算法對非地面點云進行精分類,地面點云分類利用集成的South LiDAR 軟件平臺實現地面點云精分類。
KANN DBCSCAN 算法基于DBSCAN 算法自適應確定Eps 和MinPts 的參數,其中,Eps 為掃描半徑,MinPts 為鄰域密度閾值。具體算法求解過程如下:
(1) Eps 列表由數學期望法和經過平均最近鄰法改進的K-平均最鄰近法[15]相結合生成。該算法計算數據集D 中所有對象的K-最鄰近距離,再取所有K-最鄰近距離的平均值,最后計算每一個K,得到K-平均最鄰近距離向量,計算步驟如下:
Step1:數據集D 中所有對象之間的距離,經過計算可得到矩陣Distm×n,式中對象個數為m,第i 個對象到第j 個對象的距離是dist(i,j)。

圖3 為廟墩中學前段非地面點數據集的Eps 列表和K 值的關系圖,其中Eps 隨K 值增大而升高。
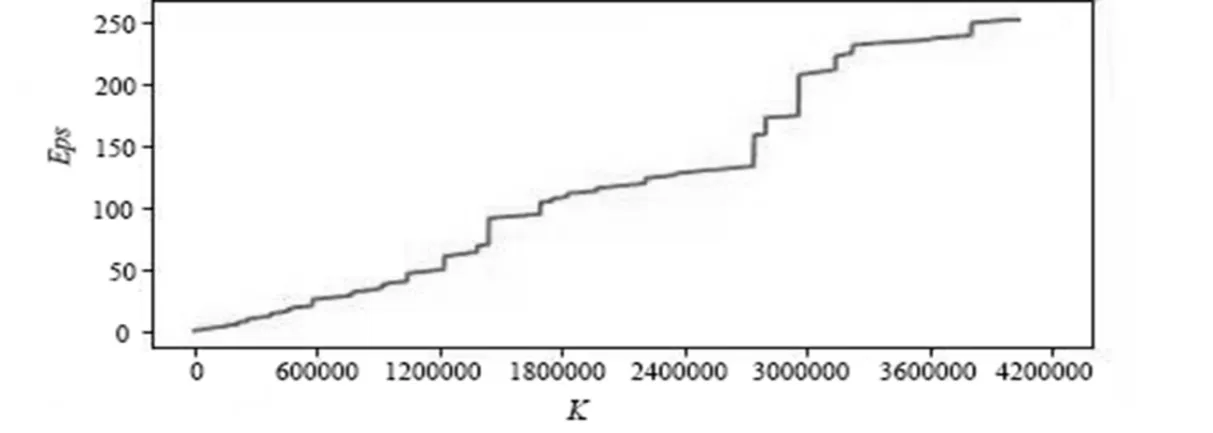
圖3 Eps 列表和K 值關系
(2) 使用數學期望法,生成MinPts 參數列表。該方法利用上一步生成的Eps 參數列表,計算對應Eps鄰域中的對象數,計算所有對象的Eps鄰域對象平均數,作為整個數據集D 的鄰域密度閾值MinPts,其表達式為:
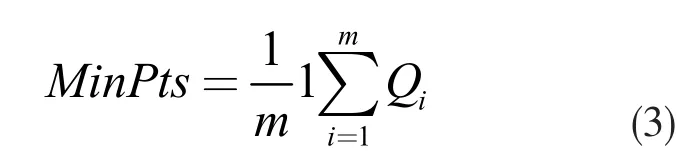
Qi為第i 個數據點的Eps 鄰域數量;m 為數據集D 的數據點的總個數。
依次計算每個Eps 參數可得到廟墩中學前段非地面點數據集MinPts 與K 值關系圖見圖4。
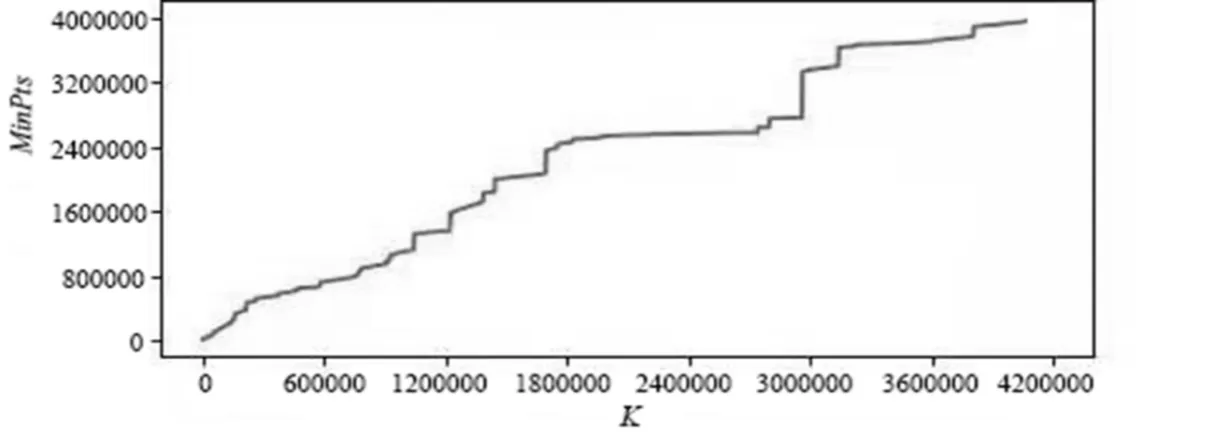
圖4 MinPts 列表和K 值關系
(3) 自適應確定最優參數。該方法采用參數集合DEps的數據和MinPts參數作為DBSCAN 算法的兩個關鍵參數進行計算,計算所得再進行聚類分析。最優K 值為利用不同的K 值計算時,生成的簇數N 連續三次相同對應的值K。將其最優K 值的K-平均最鄰近距離Distk作為最優的Eps 參數,與其相應的鄰域密度閾值MinPts 作為最優MinPts 參數。
(4) 將最優的Eps 參數和最優MinPts 參數代入DBSCAN 算法。該算法開始任意選取一個未訪問點,找出該點Eps 鄰域內的所有臨近點。找點數大于或者等于MinPts 時,該點與其臨近點形成一個簇,并將出發點標記為已訪問點。之后對簇內所有未標記的點,以相同的方法處理來延展該簇。當訪問完簇內所有標記的點后,用相同的算法去處理未訪問點,將數據集分成各種簇,以此達到全部非地面點云數據分類的目的。
South LiDAR 軟件平臺的分類功能,可實現在地面點中分類出地形點及道路點,操作難度低,效率及準確率較高。
利用上述方法對廟墩中學前段數據集進行分析,通過KANN-DBCSCAN 算法運行,得出聚類簇數與K值的關系見圖5。由圖可得當K = 89 到K = 163簇數穩定,根據此選取K=163 時對應最優Eps 和MinPts 參數,分別為Eps=6.693,MinPts=113。將兩參數導入DBSCAN 算法可得出聚類結果,結合South LiDAR 軟件對地面點分類。非地面點云分成結果為3個主要類別,分類準確度較高;地面點中到道路分類結果效果好。由此證明本算法能夠有效的對非地面、地面點云進行精分類。
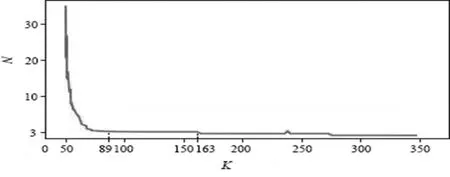
圖5 聚類簇數N 和K 值關系
2 工程實例及結果分析
本研究以廣東韶關市翁源周陂風電場項目廟墩中學作為研究對象。地點位于廣東韶關市翁源縣周陂鎮,存在山地、密林及村鎮等復雜地形環境。采用無人機激光LiDAR 進行點云數據測繪,飛行工具選取大疆Matrice 300 RTK,最大飛行高程為100 m,最快飛行速度為23 m/s。三維激光掃描儀型號為禾賽Pandar 40P,選用Ustudio 軟件進行原始數據解算,利用South LiDAR 軟件進行點云去噪,導出XYZ 文件,本研究算法主要使用Python 實現。
2.1 風電場地面點云分類
廟墩中學中段及后段去噪后的原始點云數據,總面積分別為28 296.118 m2和36 371.533 m2,中段包含27 152 031 個點云數據,后段包含39 259 992 個點云數據。分類后的廟墩中學中段及后段地面與非地面點云數據。廟墩中學中段中分類得到24 735 748個地面點云數據,2 415 235 個非地面點云數據。廟墩中學后段中分類得到36 277 666 個地面點云數據,2 968 168 個非地面點云數據。結果表明,兩段的地面點與非地面點都得到分類較好效果。
2.2 風電場非地面點云、地面點云數據精分類
利用KANN-DBSCAN 算法及SouthLiDAR 軟件,對廟墩中學中段及后段非地面、地面點云數據進行精分類,結果可見KANN-DBSCAN 算法能夠使得各類非地面點云得到有效分類,廟墩中學中段點云數據分為三類,包含植被點2 285 476 個,建筑點包括建筑及線桿共126 831 個,電線點為2 928 個;廟墩中學后段點云數據分為四類,其中植被點2 314 283 個,建筑點包括建筑點共650 720 個,電線點為3 165個,菜棚點15 750 個。直接使用SouthLiDAR 軟件和KANN-DBSCAN 算法分類a、b 段為SouthLiDAR 軟件分類,存在大量植被點和建筑點的混雜,a、b 段使用KANN-DBSCAN 算法分類,兩段點云得到有效的區分,還分類出不屬于植被的菜棚點。由此可發現相較于直接使用SouthLiDAR 軟件對非地面點云直接分類,KANN-DBSCAN 算法分類結果更加準確。
3 結論
(1) 本研究針對風電場項目點云數據數量龐大,分類不準確的問題。首先使用不規則三角網加密濾波算法,后運用三維KANN-DBSCAN 算法和SouthLiDAR 軟件。實現地面點、非地面點快速分類,并進一步分類出植被、建筑、電線、道路等各類點云,指出一條快速有效的風電場點云數據分類方法。
(2) 根據翁源風電場項目點云數據分類結果,證明本研究方法適用于實際風電項目,并驗證了本研究方法能提高風電場點云數據分類精度和效率。該方法也能為相近的工程項目數據分類方法給予參考依據。
(3) 本研究僅將原始數據分為植被、建筑、電線等大類,之后還可以針對植被高度,建筑、電線類型等進行更精確的分類研究。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
少兒科學周刊·少年版(2015年3期)2015-07-07 21:00:00
