間歇氣舉排水采氣智能監控系統研究與設計*
2022-02-13 02:22:40居錦武任俊松彭緒濤吳軍萍
石油機械 2022年12期
王 儀 賈 程 居錦武 任俊松 彭緒濤 吳軍萍
(四川輕化工大學計算機科學與工程學院)
0 引 言
大部分氣井生產中后期將需要排水采氣工藝,常見的排水采氣有速流管、泡排、有桿泵、螺桿泵、電潛泵、連續氣舉、間歇氣舉及柱塞氣舉等方式。許多研究者[1-3]對常見排水采氣的優缺點進行了全面系統分析。對于注氣壓力足夠的中淺層氣井,在不下入氣舉閥的情況下,氣舉排液采氣基本不受井身結構影響,可廣泛用于大斜度井及水平井。對于低產低壓氣井,間歇氣舉相對于連續氣舉,可有效提高氣舉效率,因此在氣井開采中后期廣泛使用。本研究主要針對光油管間歇氣舉排水采氣,未考慮氣舉閥。
由于光油管間歇氣舉排液采氣生產工藝極為簡單,一般采用人工方式或者時鐘自動控制法定期開啟注氣氣舉、關閉注氣自噴來進行生產管理。2017年,R.E.MOFFETT等[4]論述了定時開啟間歇氣舉的不足,提出了基于注氣舉竄井筒積液后的油管壓力變化特征來自動關閉注氣的方法,可以節省大量的注氣量,但并未研究間歇注氣氣舉的合適時機。由理論分析可知[5-6],間歇注氣氣舉的時機與井筒積液程度密切相關:若井筒積液嚴重時注氣氣舉排液,一方面影響氣井產量,另一方面提高了注氣排液的難度(需要更高的注氣壓力、更多的注氣量);若井筒積液輕微時采用注氣氣舉排液,則必然導致注氣浪費且影響產量。一般來說,間歇注氣氣舉排液時機選在井筒積液未對自噴生產帶來較大影響時較為合適。多年來,研究者對井筒積液的診斷有很多研究,最直接有效的辦法就是井筒壓力梯度測井解釋,但該方法費用高、需要專用設備,難以滿足智能自動生產管理需求。為此,許多研究者提出了利用生產動態資料[7-9],特別是應用井口油壓、套壓的變化特征來診斷井筒積液情況,該方法便于實現間歇氣舉智能自動控制。
隨著信息化、互聯網技術的發展,井場數字化、智能化、物聯網化是當前智能油氣田建設的基本要求,很多研究者對井場物聯網建設方案有較為系統的思考[10-14],提出了一些通用的解決方案,包括與井直接相關的參數感知、智能自動控制、連網傳輸以及后臺分析處理等。就具體排水采氣井而言,技術服務廠商還是更多地從滿足智能自動操控需求來設計產品[15],做的較為成功的是智能柱塞排水采氣[16-17],在泡沫排水采氣加注工藝也有一些嘗試[18],對氣井的生產動態與工況全方位監控設計考慮不足。
本研究針對光油管間歇氣舉排水采氣需求,借鑒了其他類型智能控制器的有益經驗,同時考慮了井場物聯網發展的需要,基于本研究團隊申請的專利技術[19],設計了間歇氣舉排水采氣智能監控系統。該智能監控系統具有以下特點:①在自動操控功能上,在傳統的間歇氣舉排液(簡稱氣舉)與自噴生產(簡稱自噴)2種生產狀態外,還考慮了注氣、停井2種可能狀態;②在感知傳感器設計上,除考慮智能控制需求外,還考慮了生產動態分析需求,設計的傳感器有注氣流量傳感器、注氣干線壓力傳感器、套壓傳感器、油壓傳感器、回壓傳感器和生產產氣流量傳感器;③在智能控制上,增加了基于壓力變化特征的積液工況診斷與氣舉排液舉竄工況診斷,可以實現智能自動切換生產狀態,同時保留了時鐘控制切換功能,提供了遠程人工操控接口;④在遠程連網傳輸上,設計了4G物聯網傳輸模塊,支持常用的MQTT傳輸協議。
1 井口系統設計
為了滿足間歇氣舉排水采氣智能生產監控的需求,筆者對傳統的氣舉排水采氣井口系統進行了改造,主要是增加必要的檢測傳感器和可自動控制開關的注氣及生產閥門(見圖1),主要設計思路如下。

圖1 間歇氣舉排水采氣智能生產控制系統井口設計示意圖
(1)間歇氣舉排水采氣采用油套環空注氣、油管采氣方式。工作時,先將注氣閘門和生產閘門打開,根據優化設計方案,調整好注氣壓力、注氣排量、產氣排量和生產油壓等參數范圍;然后根據智能生產控制優化方法,基于油壓、套壓變化特征智能開啟注氣薄膜控制閥、生產薄膜控制閥。系統同時提供了手動操控功能。
(2)研究設計的間歇氣舉排水采氣智能控制器為井口核心器件,負責采集傳輸數據并發出控制指令。
(3)在套管注氣井口側翼,依次增加了注氣流量傳感器、干線注氣壓力傳感器、注氣薄膜控制閥;另一套管井口側翼增加了套壓傳感器。
(4)在油管生產井口側翼,依次增加了生產薄膜控制閥、回壓傳感器、生產流量傳感器;另一油管井口側翼增加了油壓傳感器。
(5)通過加裝注氣流量傳感器、采氣生產流量傳感器、干線注氣壓力傳感器、套壓傳感器、油壓傳感器、回壓傳感器,經智能控制器匯集處理后,一方面可以實時監控氣井生產工況動態,同時為控制指令的智能產生提供數據基礎。
(6)注氣薄膜控制閥、生產薄膜控制閥,為氣動控制開關閥,控制氣源可直接來源于套管氣(需經過降壓、凈化后為薄膜控制閥提供開關動力)。在控制氣源通道上增加電磁閥,由電磁閥控制氣源的開啟。智能控制器發出控制指令控制電磁閥的開啟。
2 智能控制器研究設計
間歇氣舉排水采氣智能生產控制系統的核心器件是智能控制器。本研究基于間歇氣舉技術原理,針對間歇氣舉排水采氣智能生產控制需求,參照本項目團隊研發的專利技術[19],同時兼顧了未來的物聯網技術發展應用需要,設計了一套智能控制器。
2.1 智能控制器硬件系統設計
智能控制器硬件系統以ARM處理器為核心,連接傳感器實時采集間歇氣舉排水采氣生產數據,嵌入智能控制算法,實現舉升狀態自動調整;同時提供了人機交互相關功能,系統還可通過4G物聯網模塊與物聯網平臺進行交互。智能控制器硬件系統結構如圖2所示。

圖2 智能控制器硬件設計示意圖
智能控制器的核心器件為基于ARM 32-bit CoretexTM-M3 CPU的STM32F103CB芯片,其主頻7 MHz,64 kB Flash存儲器,SRAM內存20 kB。該芯片負責控制器數據采集、處理及指令輸出。
智能控制器提供8路模擬量輸入,當前系統連接6個傳感器輸入,其余為預留。目前提供4個壓力傳感器、2個流量傳感器連接。4個壓力傳感器分別為注氣干線壓力傳感器、井口套管壓力傳感器、井口油管壓力傳感器和地面流程回流壓力傳感器;2個流量傳感器分別為注氣流量傳感器和井口采出氣流量傳感器。
智能控制器提供8路數字IO輸入,當前系統連接2個人機交互按鈕:一個為“設置(確定)”按鈕,一個為“選擇”按鈕。通過按鈕可以設置硬件系統工作參數。其余數字量輸入接口為預留。
智能控制器提供8路開關量輸出,當前系統使用4路,其余為預留。目前提供的4路開關輸出量分別為:控制注氣薄膜控制閥的開關電磁閥、控制生產薄膜控制閥的開關電磁閥、2個系統本身工作狀態顯示LED燈(正常、異常)。
智能控制器通過RS485接口,連接4G物聯網模塊,優選型號為ZHC4922,支持全網通4G網絡,支持MQTT傳輸協議,可直接與阿里等通用物聯網平臺進行連接。
智能控制器還提供了外接SD存儲卡接口,可擴展存儲空間;系統自帶時鐘紐扣電池RTC、帶蜂鳴器報警。
智能控制器提供了USB、RS485直聯電腦的調試接口,可修改嵌入式軟件,調試工作參數。
2.2 智能控制器軟件系統設計
智能控制器嵌入軟件基于ARM指令集,采用C語言進行開發實現,其主要運行邏輯如圖3所示。開機后首先自檢系統軟硬件,讀取系統設置參數,然后進入主循環。

圖3 智能控制器軟件主要運行邏輯示意圖
軟件主循環主要有8個模塊,具體如下。
(1)數據采集模塊。該模塊根據采樣頻率設置定時讀取傳感器檢測數據,若有異常則報警。采樣頻率可在10~600 s內自由設定。
(2)數據存儲模塊。該模塊將采集到數據及各種操控數據進行存儲。
(3)自控邏輯模塊。這是最為核心的模塊,根據自控邏輯算法,達到控制條件則輸出控制指令。生產狀態控制指令分為4種:關井(注氣控制電磁閥關、生產控制電磁閥關)、注氣(注氣控制電磁閥開、生產控制電磁閥關)、氣舉(注氣控制電磁閥開、生產控制電磁閥開)、自噴(注氣控制電磁閥關、生產控制電磁閥開)。
(4)數據發送模塊。該模塊將傳感器采集數據及生產狀態數據、系統狀態數據,通過RS485接口進行發送,電腦可直聯RS485讀取數據,物聯網平臺通過4G模塊讀取數據。數據發送頻率由上位機來設定,其時間范圍為10~600 s。
(5)按鍵讀取模塊。該模塊讀取設置按鍵、選擇按鍵狀態,觸發對應選項操控指令,調用相關模塊進行處理,主要有修改設置參數和發送生產狀態控制指令。主要設置參數有數據采集頻率、與物聯網平臺的連接設置、智能自動控制參數設值(如采用時控法或壓控法,時控法的各生產狀態持續時長,壓控法的切換界限參數等)。
(6)遠程操控讀取模塊。該模塊通過電腦直聯或者物聯網平臺連接的RS485接口讀取操控指令,主要有修改設置參數和發送生產狀態控制指令。
(7)LCD顯示模塊。該模塊根據按鍵選項設置,顯示相應內容,包括系統硬件工作狀態、井生產狀態及參數、系統參數設置選擇內容等。
(8)自控邏輯模塊。該模塊是智能控制器的核心,它實現了完備的自控邏輯,根據系統設置參數、實時檢測數據、手動操控指令狀態,自動輸出井生產狀態改變指令:氣舉、自噴、注氣和關井。其主要算法邏輯如圖4所示。

圖4 自控邏輯算法邏輯示意圖
首先,讀取系統狀態參數,包括系統設置參數、當前井生產狀態(關井或注氣或氣舉或自噴)及該狀態持續時間、實時生產工藝參數(注氣壓力、套壓、油壓、回壓等)、生產工藝參數變化特征參數(如:油套壓差、油壓變化梯度、套壓變化梯度等)、按鍵或者遠程輸入的生產狀態切換指令等。然后,確定是否需要輸出控制指令。若有手動控制指令,優先執行;若無手動控制指令,則按系統設置自動切換算法選項(時鐘法或壓控法),判定是否達到生產狀態切換條件。
控制器的“智能”體現在時鐘法與壓控法上。時鐘控制法比較好理解,預先設置的各種工作狀態的工作時長,當現工作狀態持續時間達到設定時長時就自動發出切換指令;壓控法是本智能控制器的創新所在,根據油壓、套壓變化特征來診斷氣舉舉竄與自噴積液工況從而自動輸出切換指令,具體診斷切換方法如下(“停井”、“注氣”并非生產常態,未考慮切換算法):
自噴轉氣舉:①油壓下降,油套壓差上升,輕微積液,需要重點關注,可考慮人工切換。②油壓波動下降,套壓較為穩定或下降,積液已經影響生產,發送切換為“氣舉”指令。
氣舉轉自噴:氣舉一段時間,油壓劇烈波動后,油套壓差穩定,氣舉舉竄特征明顯,發送切換為“自噴”指令。
3 測試驗證
3.1 室內模擬裝置測試
為了驗證本研究設計的間歇氣舉排水采氣智能控制系統,在室內做了一個簡單的試驗測試裝置,如圖5所示。試驗裝置用4個硬管,裝載不同液位的水量,在水管中放置4個液位壓力傳感器,分別模擬干線注氣壓力、套壓、油壓、回壓的監測;在模擬套壓、油壓的水管中放置潛水泵,潛水泵通過繼電器控制,模擬注氣、生產電磁閥開啟;通過潛水泵開啟還可以改變液位,可模擬油壓、套壓變化。
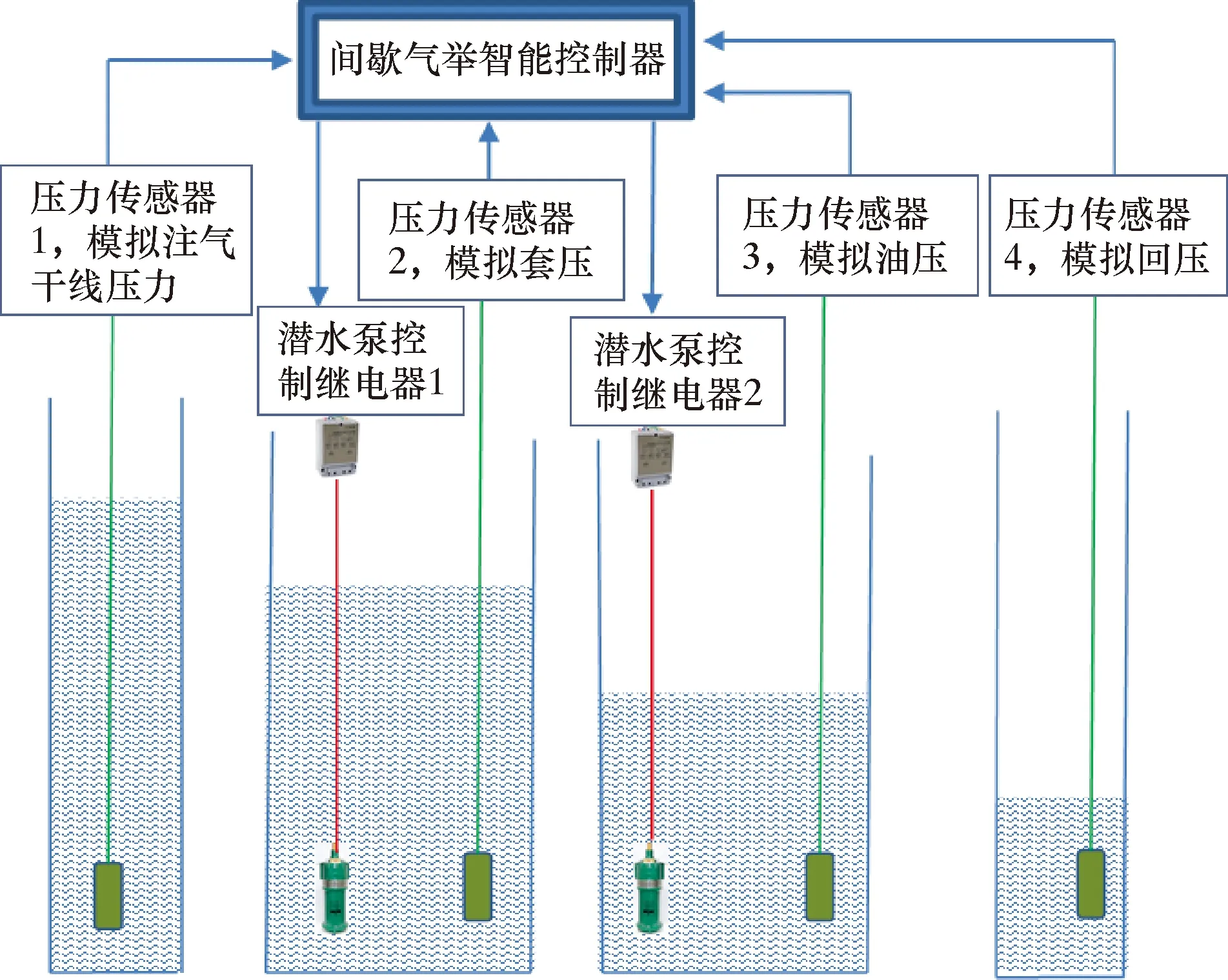
圖5 控制器室內測試裝置示意圖
由室內模擬裝置測試可知,間歇氣舉控制器能正常采集傳輸傳感器數據,能根據不同的自控策略正確輸出控制指令,系統總體功耗在2 W左右。在實際油田應用中,壓力等級、真實操作邏輯還有較大差別,但其原理類似,只需要修改相關設置參數,即可到現場進行測試應用。
3.2 礦場數據驗證
在西部某氣田支持下,獲取了某區塊2口井(某區井1、井2)柱塞輔助間歇氣舉排液采氣井資料。2口井的井口智能控制系統直接采用智能柱塞控制系統,實現了油壓、套壓的實時數據采集。智能柱塞排水采氣采用時鐘法控制且只能控制生產出口智能開啟與關閉,注氣由人工控制,即:當柱塞氣舉生產時人工開啟注氣閘門,注氣保持一段時間后人工關閉注氣。井1的部分實時監控油套壓變化曲線見圖6。其工作制度中間做了1次調整,開始為氣舉1 h、自噴3 h和關井2 h,后調整為生產期間2次氣舉;從油壓、套壓變化曲線可以看出氣舉時氣竄特征明顯,在生產周期只有1次氣舉時,有2次能明顯觀察到自噴中后期油壓有壓力波動。井2的部分實時監控油套壓變化曲線見圖7,其工作制度氣舉1 h、自噴5 h和關井2 h;從油壓、套壓變化曲線可以看出氣舉時氣竄特征明顯,其中在9月17日有1次氣舉未舉竄,9月19日油壓與套壓近似相等表現異常。

圖6 井1的部分實時監控油套壓變化曲線
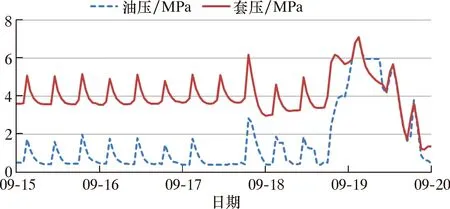
圖7 井2的部分實時監控油套壓變化曲線
通過對2口實際礦場柱塞輔助間歇氣舉排水采氣數據分析,可以看出有3個主要問題:①采用智能柱塞控制系統,無法實現注氣的自動控制,還需要手動操作氣舉;②實時監控油壓、套壓采樣頻率為1 h,實際生產的細微特征無法檢測;③注氣量、采氣量未實現實時監控,對間歇氣舉的效果分析難以細化。
為了分析本項目研究的間歇氣舉排水采氣智能監控系統的效果,對采集到的實際礦場數據做了處理:將日報中的注氣量、采氣量、注氣干線壓力、回壓按生產特征,劈分到實時監控點上,這樣就有完整的模擬實時監控數據。然后,編制程序用電腦將該數據按30 s的間隔發送給新研發的智能監控器。最后通過設置新研發的智能監控器工況診斷與自控參數,觀察分析其運行效果,測試結果如下。
(1)對于實時感知,在顯示器上,能正確顯示瞬時日注氣量、日產氣量、注氣干線壓力、套壓、油壓、回壓,實現了關鍵參數感知的全覆蓋。
(2)對于工況診斷,與專家經驗診斷對比分析:①在氣舉階段,能準確判定氣舉舉竄工況,正確率達到100%;②在自噴階段對3次油壓波動實現了準確判定積液影響生產,正確率達到100%;③異常判定,對井2的部分時段油套壓近似相等,甚至油壓大于套壓進行了報警。
(3)對于時鐘法智能控制,基于設定的氣舉時間、自噴時間、關井時間、注氣時間,正常打開相應的繼電器,實現到點正常切換。
(4)對于壓控法智能控制。能準確判定氣舉舉竄工況,并自動實現從氣舉到自噴的切換,正確率100%;能準確判定自噴階段積液導致的油管壓力波動,并自動實現從自噴到氣舉的切換,正確率100%。
通過分析可以看出,新研發的監控系統可以實現氣舉、自噴、注氣、停井全面自動操控;能實現對關鍵核心生產參數的全面監控,覆蓋率達到100%;自動工況診斷與專家經驗基本相符;2種智能自動控制方法(時鐘法、壓控法)均能正常工作。
4 結 論
(1)針對間歇氣舉排水采氣井主要采用人工憑經驗進行粗放化生產管理現狀,研究設計了一套針對光油管間歇氣舉排水采氣的井場物聯網化的智能監控終端系統。
(2)在本項目研究中,通過在常規的采氣井口流程中設計增加注氣、采氣生產氣動薄膜控制閥系統(含電磁閥器件控制其開啟),可實現4種生產狀態(關井、注氣、氣舉、自噴)的靈活自動控制;同時增加了注氣流量、注氣干線壓力、井口套管壓力、生產氣流量、井口油管壓力、井口回壓傳感監測點,可實現氣井生產工況全面實時監控。
(3)根據間歇氣舉排水采氣智能生產監控物聯網發展需求,研究設計開發了專用智能控制器。該控制器選用基于ARM指令集的STM32F103CB芯片,嵌入了時鐘法、壓控法兩種智能控制氣井生產邏輯算法,同時還提供了現場按鈕、遠程軟件指令手動操作間歇氣井生產制度調控功能。智能控制器增加了4G物聯網連接模塊,可方便與遠程物聯網平臺進行數據雙向傳送。
(4)本研究專門設計了經濟實用的室內試驗測試裝置,驗證了新研發的控制器能正確采集數據、正確處理數據、正確發出控制指令并執行。
(5)應用礦場2口井實際間歇氣舉排水采氣數據,通過模擬采集處理,驗證新研發的控制器能夠對間歇氣舉井進行實時工況診斷,診斷結果與專家經驗基本相符;能夠對間歇氣舉進行智能自動正確控制。
猜你喜歡
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國軍轉民(2017年6期)2018-01-31 02:22:28
汽車零部件(2014年11期)2014-09-18 11:57:16
