水下拖曳系統定深和展開性能湖上試驗研究
2022-02-16 11:29:36李超艾艷輝佘湖清江興隆宋雯婧王盟
哈爾濱工程大學學報 2022年1期
關鍵詞:效率
李超, 艾艷輝, 佘湖清, 江興隆, 宋雯婧, 王盟
(中船重工第七一〇研究所,湖北 宜昌 443000)
拖曳系統作為一種海洋目標探測手段具有重要的軍事和科研價值,其性能的優劣會直接影響設備探測效果,如何設計和精確預報拖曳系統性能也是各國學者研究的重點。目前,研究方法主要有數值方法和試驗方法,數值方法側重方法的完善[1-3]、纜姿態的模擬[4-7]及拖曳系統水動力性能的研究[8-9];試驗方法注重拖纜阻力及振蕩特性的測量[10-11]。試驗方法中的湖、海試驗是反應拖曳系統性能優劣的最直接方法,Rrispin[12]開展了拖纜海上試驗,該數據也常用于數值方法可靠性驗證;葉凡滔[13]通過湖試測量了不同航速下拖船直航和回轉狀態水下拖曳線列陣阻力;王巖峰[14]設計了用于500 m定深的拖曳系統并開展湖上和海上試驗。湖、海試驗準備周期長、費用昂貴、過程繁瑣,目前關于拖曳系統的湖、海試驗尚未形成較為成熟的試驗準則。本文提出一種兼具定深和展開功能的探測拖體,在介紹湖試內容、測試設備和流程的基礎上開展拖曳試驗,研究拖曳系統定深和展開性能,掌握各因素影響規律,提出擬合函數。
1 試驗模型及內容
1.1 系統組成及試驗設備
水下拖曳系統由拖體、標志浮體和拖纜組成。拖纜為聚酯纖維纜,直徑12 mm,密度1.2 g/mm,法向阻力系數1.9。拖體(圖1)由4個浮筒、一對上下對稱的水平翼板、一對左右對稱的垂直翼板和位于翼板后方的4塊舵板組成,水平翼板和垂直翼板分別產生主要定深力和展開力,使拖體保持在目標定深和展寬;舵板用于調整拖體初始姿態。標志浮體(圖2)主要用于顯示水下拖體的大致位置。以上裝置主要參數見表1,拖曳系統示意圖見圖3。

圖2 標志浮體

表1 主要參數
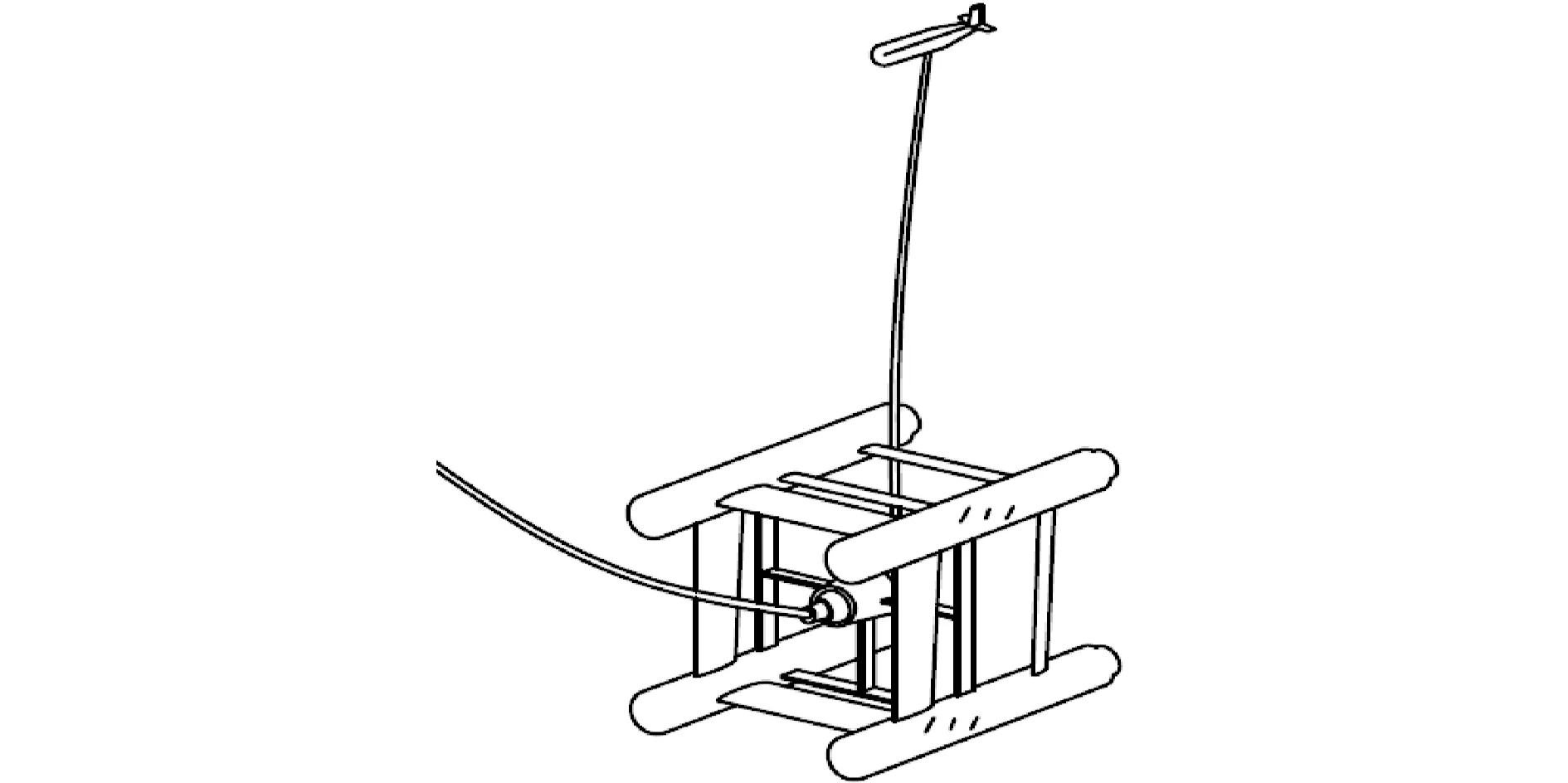
圖3 拖曳系統示意
拉力計安裝在船艉絞車上(圖4),用于測量拖纜受力,壓力傳感器、水聲應答器、傾角傳感器(圖5)安裝于拖體內部,分別用于測量拖體定深、展寬、橫滾角和俯仰角。

圖4 拉力計安裝

圖5 測量儀器
1.2 試驗內容
水下拖曳系統湖試目的是初步掌握拖體水動力性能,研究航速、翼板攻角、纜長對拖體姿態、拖纜張力以及整個系統定深和展開性能的影響,并根據結果制定定深和展開策略。拖曳航速為4、5和6 kn,拖纜長度30、50、80 m,水平舵角調節范圍[-10°,10°],垂直舵角調節范圍[-15°,15°]。試驗地點位于湖北宜昌清江水域隔河巖至巴山段。湖試內容主要包括試拖試驗和正式拖曳試驗。
正式拖曳之前要進行拖體試拖試驗,根據試拖結果通過水平舵或垂直舵對拖體姿態進行調節,使拖體達到正浮狀態,之后開展正式拖曳試驗,試驗流程如圖6。
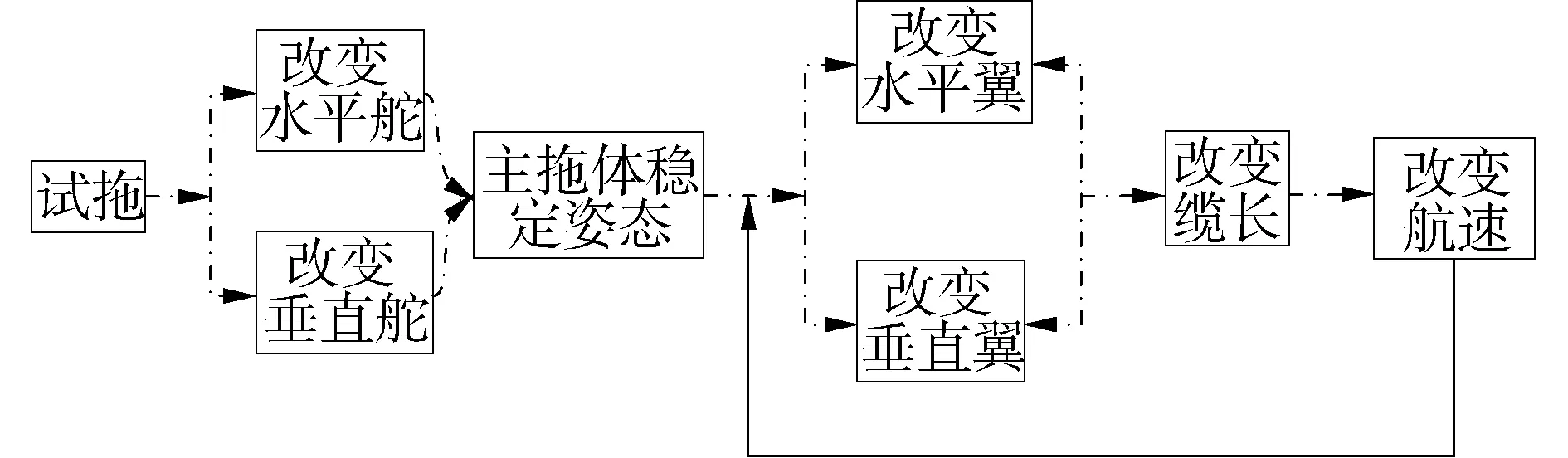
圖6 試驗流程
試驗中拖體定深以靜水面為基準,展寬以船中縱軸線為基準。壓力傳感器實時測量拖體深度,水聲應答器通過船端基陣應答來確定拖體的相對位置,結合基陣的GPS坐標最終得出拖體的實際位置,傾角傳感器通過母船控制端實時讀出俯仰及橫滾數據。
2 試驗結果
試驗中拖體姿態角及翼板攻角方向按照圖7中右手坐標系,即:拖體仰艏為正,埋艏為負,右傾為正,左傾為負,拖體水平翼板攻角和水平舵板舵角向上為正,向下為負,垂直翼板攻角和垂直舵板舵角右轉為正,左轉為負。
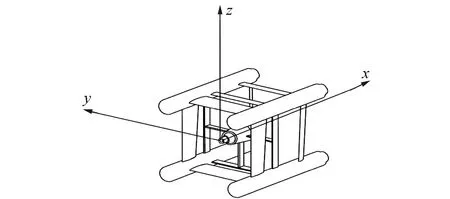
圖7 隨體坐標系
2.1 試拖試驗
試拖試驗目的是初步了解拖體重浮心和拖曳點的匹配度。低航速下拖體受到流體力較小,更易反映出拖體自身性能。以航速4 kn作為初始航速開展試拖試驗。
圖8為不同攻角下俯仰和橫滾變化曲線,俯仰角變化范圍5°~6°,水平翼板力的作用點位于質心后方,隨著攻角的增大,產生抬首力矩。俯仰角始終保持在5.50左右,拖體本身作為一個大升力體會產生向上升力,需通過后水平舵板將主拖體調節到正浮狀態;橫滾角范圍-0.40°~0.7°,角度較小符合試驗要求,無需對橫滾進行調整。

圖8 俯仰和橫滾變化
圖9為不同航速下舵板對俯仰姿態的調節結果。隨著水平舵板舵角β的增加,拖體逐漸接近正浮姿態,改變拖曳航速后需重復操作,確保拖體姿態滿足拖曳要求,航速4、5、6 kn水平舵板角度分別為15°、15°、12°,不同航速下正式拖曳時,保持各自舵板角度不再調整。
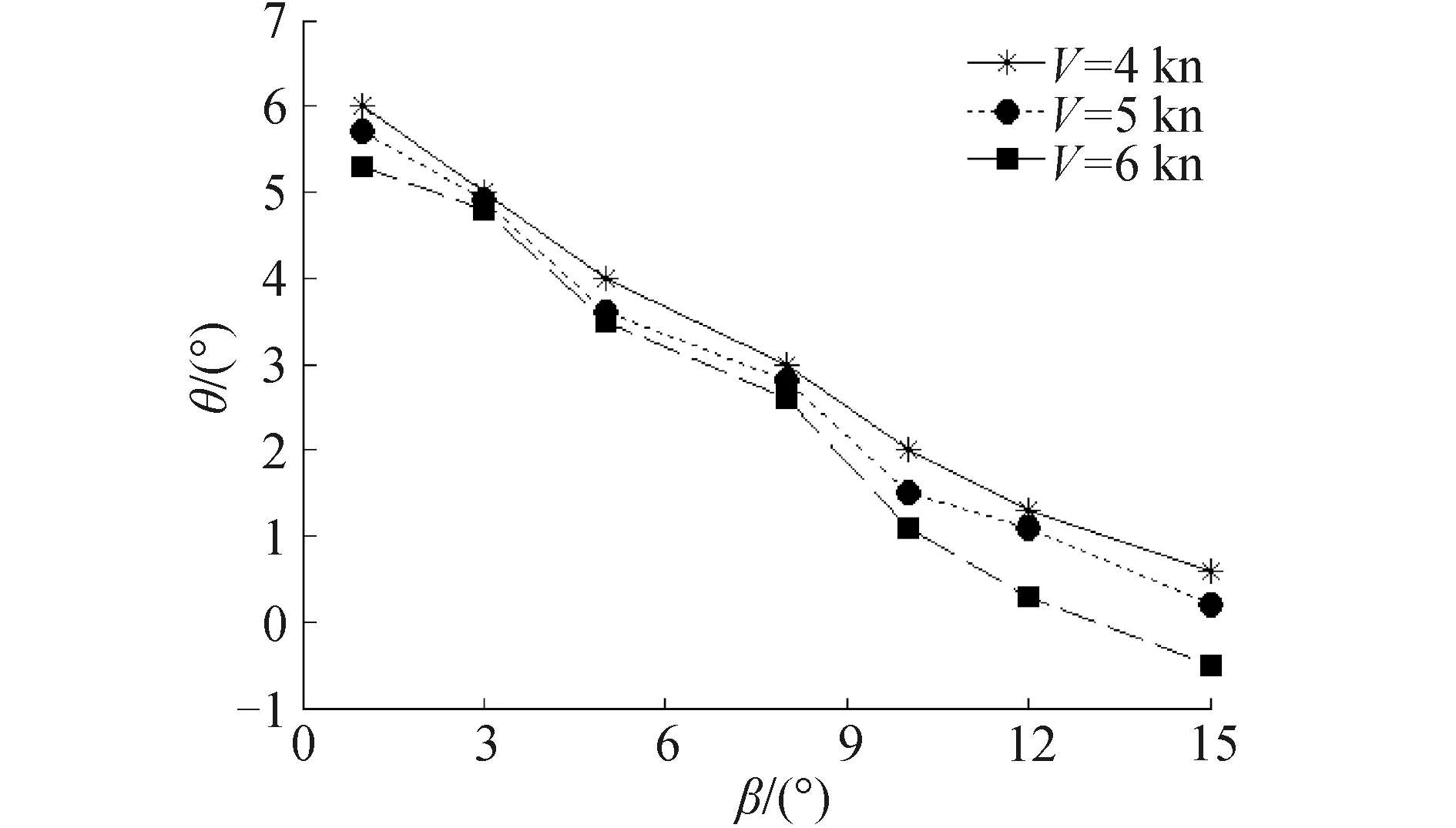
圖9 舵板調節能力
2.2 正式拖曳試驗
將姿態調整后的拖體重新布放下水,放纜長度30 m,穩定拖曳之后,改變水平翼板或垂直翼板攻角,每改變一次攻角,穩定拖曳時間不少于5 min,得到不同航速和纜長情況下拖體定深、展寬和拖纜受力情況。
2.2.1 定深試驗結果
通過改變水平翼板攻角、航速和纜長探索影響拖體定深和干端拉力的主要因素,研究拖體定深規律。對于拖曳系統而言,干端指船艉和拖纜相連接的位置,該位置拖纜受力最大,也是拖纜破斷拉力校核的基礎拉力。
圖10和圖11為改變航速和攻角得到的定深和拖曳力變化曲線,拖體定深和干端拉力與翼板水平攻角呈線性關系,翼板攻角越大,定深越深,干端拉力越大,30 m纜長的最大定深近25 m。隨著航速的增加,拖體升阻力和拖纜切、法向阻力增加,使得重力在整個拖曳系統受力中的比例降低,引起垂直干端角度φ(船艉處拖纜切線與作用點法線方向所成夾角,tanφ=(w+FL)/FF,w為拖曳系統重浮力差,FL為升力,FF為阻力)逐漸減小,拖纜后伸距離增加,定深減小。干端拉力隨航速的增加而變大,航速越高,翼板所能產生的升阻力越大,圖11中曲線斜率越大,干端拉力對攻角變化也就越敏感。降低航速和增加翼板攻角都能起到增加拖體定深的效果。
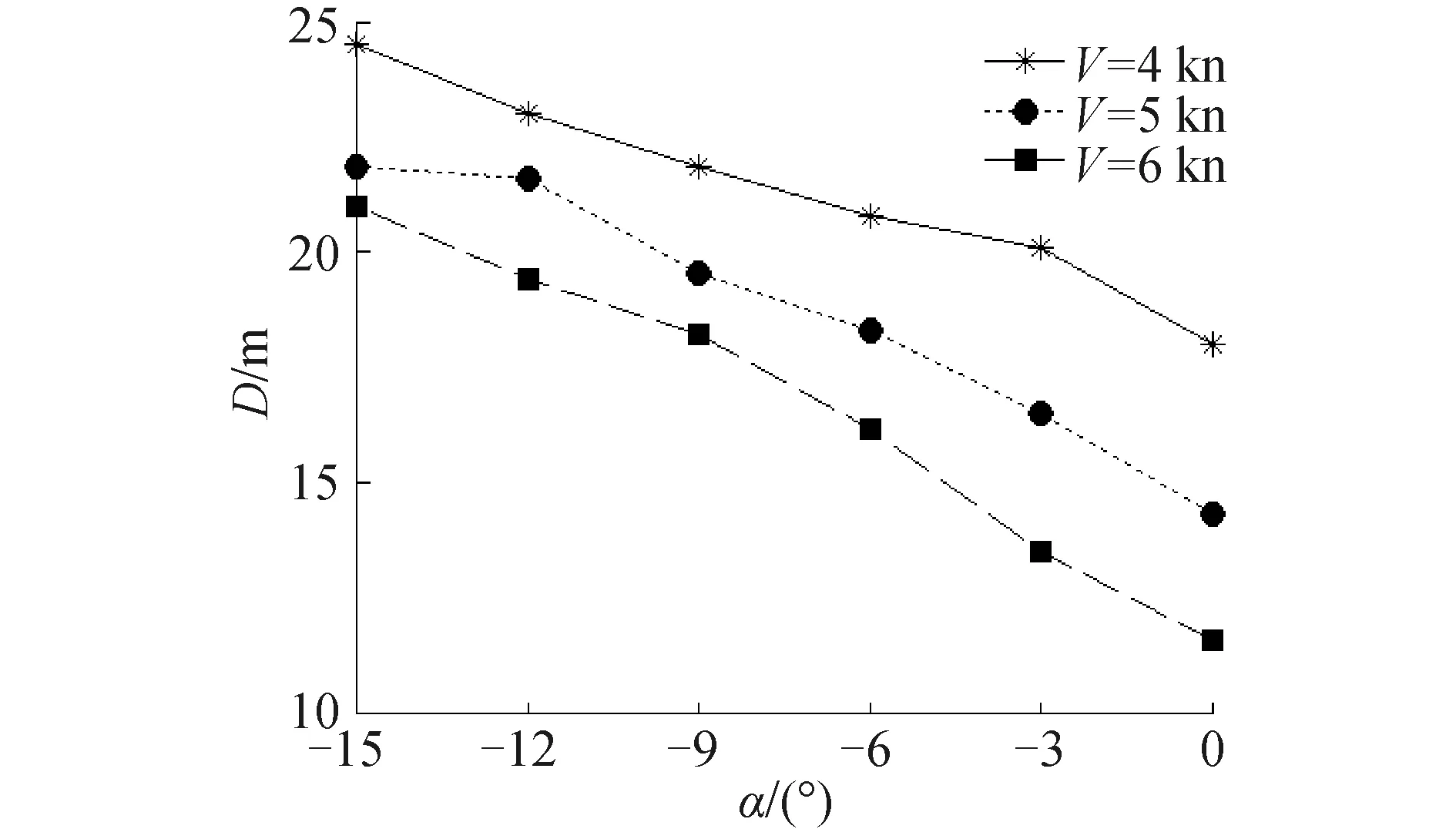
圖10 定深隨攻角和航速變化
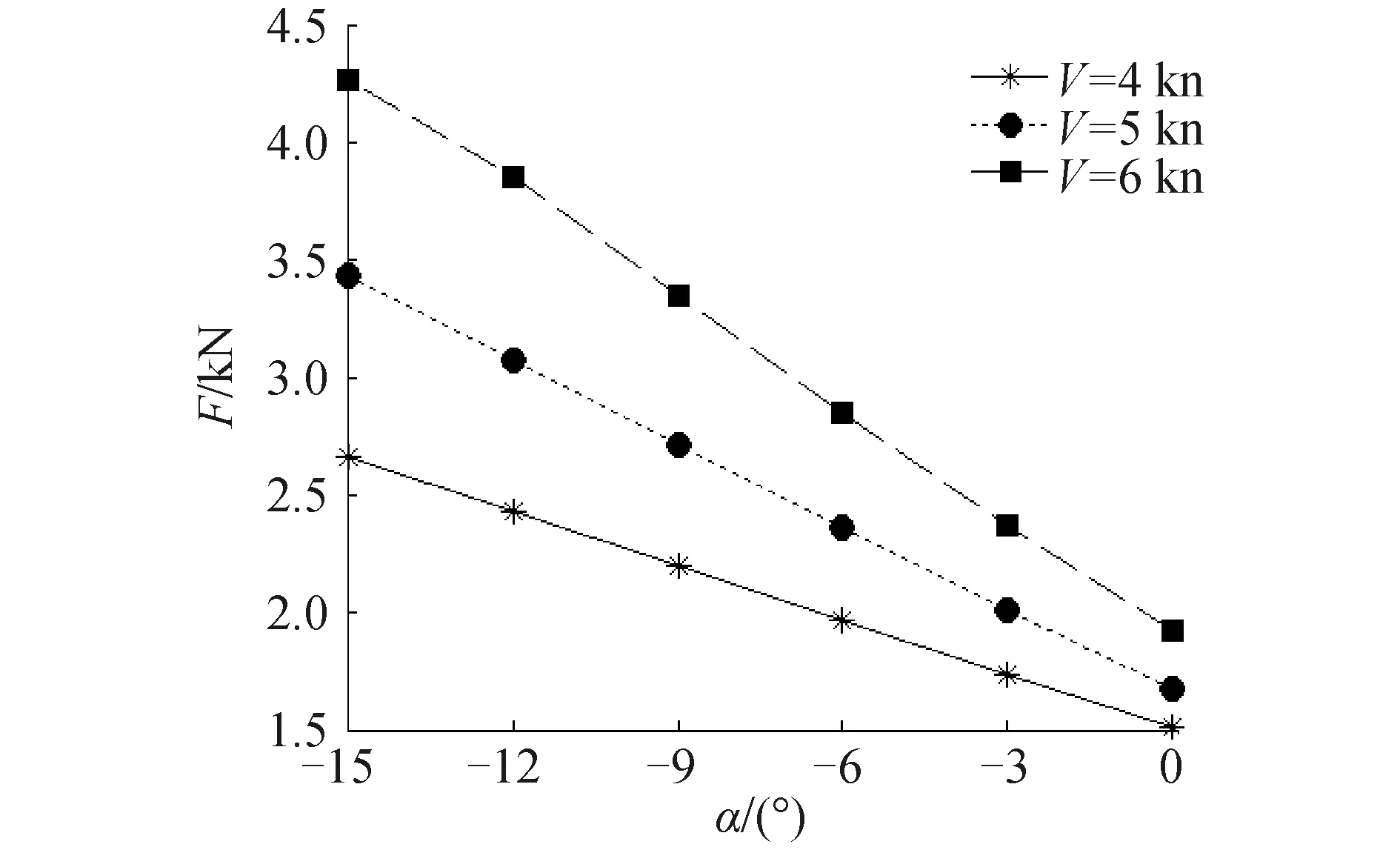
圖11 拖曳力隨攻角和航速變化
對不同航速下拖體定深效率進行進一步分析,結果如圖12所示,圖中定深效率為深長比,即d=D/L×100%。隨著翼板攻角的增加,拖體定深效率逐漸變大,最大達到80%。原因在于:翼板攻角變大,翼板升阻比增加,流體力占比提高,拖纜垂直干端角變大,翼板阻力增加所引起拖纜的后伸效果要弱于升力增加所引起的定深效果;由于低航速下,重力對定深起到主要作用,所以航速越低,定深效率越高,定深效果越好。拖曳航速過低雖可以在有限纜長下增加探測范圍,但也會增加拖曳探測的時間成本,拖曳航速過快則會加大拖曳定深的難度。
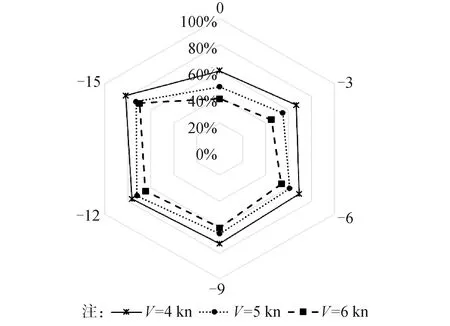
圖12 不同航速下拖體定深效率
保持6 kn航速,將纜長由30 m逐漸增加到50 m和80 m,分析不同纜長對拖曳定深和干端拉力的影響。
由圖13和圖14結果來看,隨著纜長的增加,拖體定深逐漸增加,曲線斜率變大,定深對翼板攻角的變化越敏感。纜長的增加也會引起拖曳系統所受重力比例增加,垂直干端角變大,引起空間內纜型發生變化。放纜50 m,干端拉力平均增加力500 N,可見,拖曳系統干端拉力的增加主要是由拖體翼板攻角變化引起,但對于纜長達上千米的深拖而言,纜長對干端拉力的影響不能忽略。
圖13 定深隨攻角和纜長變化
圖14 拖曳力隨攻角和纜長變化
根據圖15結果分析,不同纜長情況下,定深效率皆隨攻角增加而變大,最大70%。隨著纜長的增加,定深效率逐漸降低,纜長增加所引起的阻力增值要大于重力增值,造成定深效率降低,如何降低拖纜的切、法向阻力也是增加拖曳定深的一種思路。
圖15 不同纜長下拖體定深效率
目前增加定深的方式主要有增大翼板攻角,降低航速和增加纜長3種,其中通過翼板攻角進行定深調節更便于深度的控制,優先考慮該種定深方式。本文涉及的拖體為重力型拖體,拖曳航速一般6 kn以內,單獨通過翼板定深有較大局限性,對定深影響因素進行多元擬合,得到非線性擬合函數:
繪制各影響因素以及擬合圖形如圖16所示。圖16中數據點為試驗數據點,曲面為擬合曲面,數據點大多落在曲面上,擬合函數有較高的準確性。相比于通過收放纜來調節定深,改變航速具有更高的效率,但一般海洋拖探對時間有較高的要求,且母船拖曳航速變化范圍有限,加之攻角改變和定深呈線性關系,因此優先考慮通過增加翼板攻角完成定深,在增加翼板攻角仍無法達到定深的情況下再通過放纜來增加定深,最后考慮降低航速。

圖16 定深擬合函數
2.2.2 展開試驗結果
本文拖曳系統中的拖體兼具定深和展開功能,需要增加探測寬度時,拖體通過自身垂直翼板可實現展開功能。通過展開試驗研究垂直翼板攻角、航速、纜長對展寬的影響,初步探索有效調節展寬的方法。
圖17可知,垂直翼板攻角與展寬呈線性關系,攻角越大,展寬越寬,最大展寬達到15 m,展開率最大達50%。展寬隨航速的變化不明顯,原因在于展寬方向上沒有重力的參與,拖體自身升阻力是展開過程中的主要作用力,翼板攻角作為升阻力變化的主要因素,其升阻比隨航速變化不明顯,水下纜型變化隨航速未發生明顯變化,拖體展寬受航速影響很小。
圖17 展寬隨攻角和航速變化
圖18可見,拖纜張力與垂直翼板攻角呈二次函數關系,垂直翼板攻角大于9°后,張力急劇增加。對比圖19和圖12,相同航速和翼板攻角下,展開引起的拖纜張力最值要小于定深。

圖18 拖曳力隨攻角角和航速變化
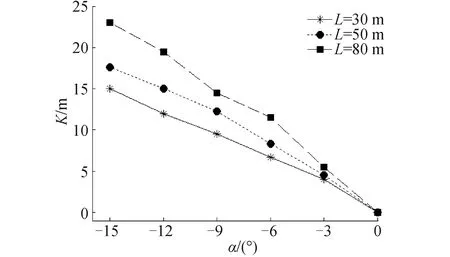
圖19 展寬隨攻角和纜長變化
對比圖20中不同攻角、不同航速下拖體展開效率不難發現:隨著翼板攻角角的增加,翼板升阻比增加,拖纜水平干端角γ(船艉處拖纜展開力方向與作用點法線方向所成夾角,tanγ=FZ/FF,FZ為展開力,FF為阻力)變大,拖體展開效率增加,最大達到50%;展開效率隨航速變化不明顯。
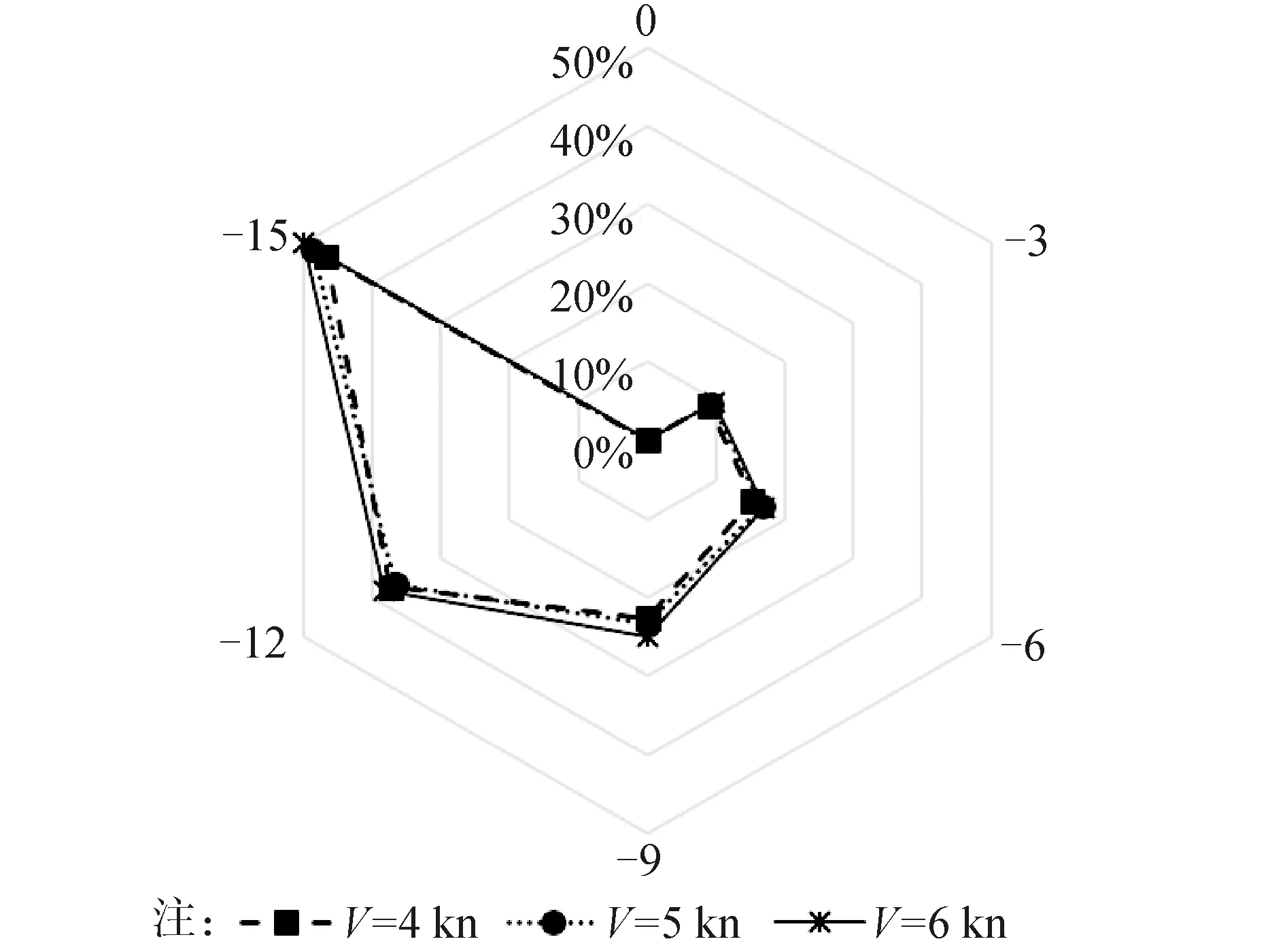
圖20 不同航速下拖體展開效率
保持6 kn航速,將纜長由30 m逐漸增加到50 m和80 m,進一步研究不同纜長對展寬和干端拉力的影響。
隨著纜長的增加,拖體展寬逐漸增加,圖19中曲線斜率也逐漸變大,表示展寬對垂直翼板攻角的變化越敏感。纜長的增加會引起拖曳系統阻力的增加,帶來干端拉力變大,如圖21所示。相同翼板攻角下,干端拉力的變化主要是由于纜長引起,進一步對比纜長對展開效率的影響,見圖22。
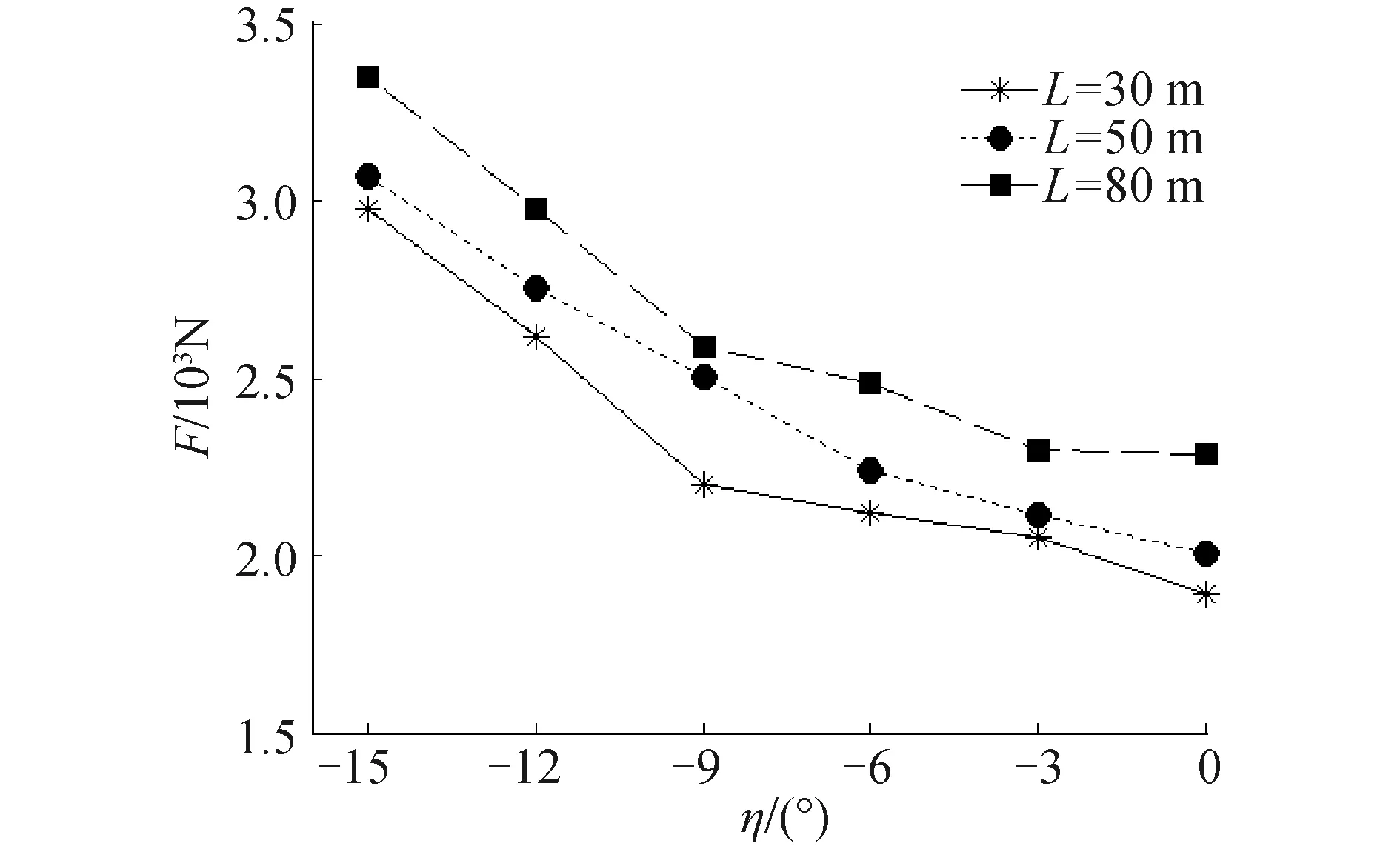
圖21 拖曳力隨攻角和纜長變化
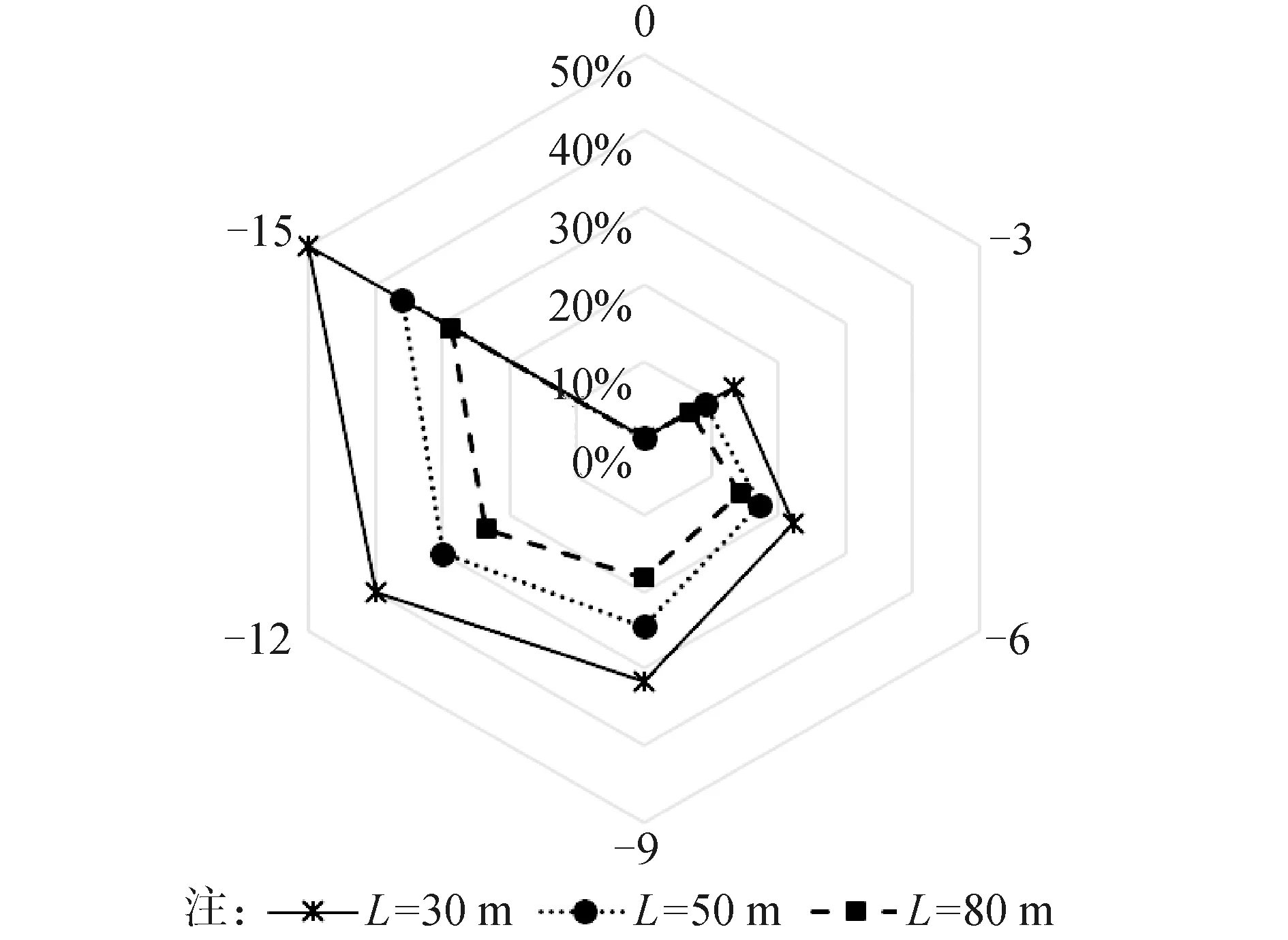
圖22 不同纜長下拖體展開效率
拖體展開效率隨纜長增加而降低,該規律與定深相同。隨著纜長的增加,拖纜切向阻力和法向阻力皆增加,二力在縱向合力要大于橫向合力,引起水平干端角變小,展開效率降低。
對定深影響因素進行多元擬合,得到擬合函數:
K=0.035 8V2-0.13V-0.001L2+0.138L-
0.625α-0.011αL-3.86
繪制如圖23所示的擬合圖形。

圖23 展寬擬合函數
目前增加展寬的方式主要有增大翼板攻角和增加纜長,航速小范圍變化對拖體展寬和展開效率的影響較小,本文涉及的拖曳系統不考慮該種調節方式。通過翼板攻角進行展寬調節更加便利、有效,優先采用該方式對展寬進行調節,其次可通過收放纜進行進一步展寬調節。
3 結論
1)本文試驗的拖體具有良好的定深和展開性能,最大定深和展開效率分別為80%和50%,進行類似拖體設計時,該種結構和姿態調節方式可為今后設計提供參考;
2)拖體定深主要受航速、翼板攻角和纜長影響,展寬主要受翼板攻角和纜長影響,且都與翼板攻角呈線性關系,在定深或展寬范圍變化不大的情況下通過翼板調節最便利;
3)增加水平翼板下攻角、降低航速、增加纜長皆可以增加定深,增加垂直翼板攻角、增加纜長可以增加展寬,但纜長的增加也會引起拖體定深和展開效率的降低;
4)各影響因素對拖曳定深、展開的作用規律及耦合影響可以通過定深、展開擬合函數體現。
本試驗研究得出的結論以及回歸函數適用于纜長較短的拖曳系統,對于上千米的深拖還需進一步研究。
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
遼寧經濟(2017年6期)2017-07-12 09:27:16
中國衛生(2016年9期)2016-11-12 13:27:54
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國洗滌用品工業(2015年7期)2015-02-28 19:02:38
電子設計工程(2015年12期)2015-02-27 12:06:10
中國衛生(2014年11期)2014-11-12 13:11:32