基于微服務架構的網(wǎng)源協(xié)調(diào)移動端系統(tǒng)設計
2022-02-17 05:58:56泰豪軟件股份有限公司孫斐斐付振鵬張國印張遠來
電力設備管理 2022年2期
泰豪軟件股份有限公司 姜 山 孫斐斐 付振鵬 張國印 匡 斌 張遠來
我國的電力結構在互聯(lián)網(wǎng)以及大數(shù)據(jù)技術的輔助下逐漸優(yōu)化完善,形成具有更強大能力的電力運輸調(diào)配網(wǎng)[1]。最近幾年電網(wǎng)的規(guī)模漸漸擴大,再加之特高壓直流交流輸電功能的添加,以及新能源的迅猛發(fā)展,使得電網(wǎng)的覆蓋面積和電力處理能力慢慢提升,取得了相對較好的效果[2]。在這樣的背景之下,雖然電網(wǎng)的形成給人們的生產(chǎn)生活以及社會發(fā)展提供了極大的便利,但是實際調(diào)配應用的過程中,由于情況的變化以及突發(fā)性故障的產(chǎn)生,導致電網(wǎng)日常的運行問題日益嚴重,穩(wěn)定性也不復從前[3]。
經(jīng)過調(diào)查研究發(fā)現(xiàn),造成這一現(xiàn)狀的主要影響因素之一是電力網(wǎng)源處理能力的下降[4]。網(wǎng)源在電力系統(tǒng)始終扮演著相對較為關鍵的一個角色,其重要性堪比電源[5]。當電網(wǎng)在運行的過程中,網(wǎng)源會在移動端的輔助作用下進行協(xié)調(diào)工作,并對相關區(qū)域的電力實行傳輸和調(diào)配,這種執(zhí)行方式是持續(xù)性的,并且由相關的指令信號所控制,更加精準、穩(wěn)定[6]。
但是近幾年來,我國的電力需求量不斷增大,這也使得電網(wǎng)的運行壓力隨之提高,網(wǎng)源的協(xié)調(diào)移動端已經(jīng)不能滿足原本的傳輸承壓,需要依據(jù)實際的供電處理需求,進行多元化的系統(tǒng)升級與創(chuàng)新[7]。微服務架構是目前階段應用較為廣泛的一種網(wǎng)端處理結構,主要被應用在復雜網(wǎng)端的處理與轉(zhuǎn)換上,在面對多種網(wǎng)源異常時,對比于傳統(tǒng)單一模式的處理結構,微服務架構可以更加靈活、多樣地作出應變處理,并且在正常運行的情況下,確保移動端的數(shù)據(jù)信息處于完整的狀態(tài),避免出現(xiàn)數(shù)據(jù)丟失的問題[8]。
因此,對基于微服務架構的網(wǎng)源協(xié)調(diào)移動端系統(tǒng)進行設計。在較為真實的環(huán)境之下,設計多目標的處理程序,并依據(jù)網(wǎng)源的變化情況,結合獲取采集的日常電力處理數(shù)據(jù)信息,編制對應的網(wǎng)源協(xié)調(diào)移動端指令,將完成的指令添加在系統(tǒng)的控制區(qū)域之中,并與功能指令進行互相關聯(lián)[9]。建立交互作用網(wǎng)源協(xié)調(diào)的特征來更改系統(tǒng)的處理速度和質(zhì)量,增強其綜合的協(xié)調(diào)處理能力以及質(zhì)量水平[10]。
1 系統(tǒng)硬件設計
1.1 主控協(xié)調(diào)芯片設計
首先需要進行硬件的設計,在微服務的架構之下,可以先進行主控協(xié)調(diào)芯片的設計。主控協(xié)調(diào)芯片是對系統(tǒng)移動端的協(xié)調(diào)情況來進行控制的。所以,它主要的作用范圍是網(wǎng)源的協(xié)調(diào)范圍。在初始的系統(tǒng)電路之中安裝信號感應器,并將其與電源相關聯(lián),在信號感應器的側(cè)方連接一個小型的異常監(jiān)控裝置,當系統(tǒng)出現(xiàn)故障或異常的狀況時,可及時作出預防以及報警的功能。利用ZigBe轉(zhuǎn)換傳輸平臺將需要傳輸?shù)男盘栔糜谛盘柛袘鞯目刂茀^(qū)之中,并在監(jiān)測裝置中設定相關的限制閥,當信號傳輸時,只有與其相協(xié)調(diào)一致時才可以進行移動端數(shù)據(jù)的采集,一旦出現(xiàn)不一致的情況信號感應器將會自動識別并作出攔截。
完成以上設置之后,進行主控協(xié)調(diào)節(jié)點的設置,并依據(jù)實際情況計算其數(shù)量,具體如下:L=+0.5ω-3/4t,式中:L表示主控協(xié)調(diào)節(jié)點數(shù)量表示移動端的關聯(lián)范圍,ω表示接口的處理頻率,t表示協(xié)調(diào)誤差。通過以上計算可以得出實際的主控協(xié)調(diào)節(jié)點數(shù)量。安裝CC2530芯片作為初始主控芯片,在芯片的周圍進行主控協(xié)調(diào)節(jié)點的設置,當電壓處于3.6V時,關聯(lián)DMA端口控制器,最終實現(xiàn)主控協(xié)調(diào)芯片的設計。
1.2 復位電路設計
在完成主控協(xié)調(diào)芯片的設計之后,接下來在此基礎上進行復位電路的設計。電源電路與復位電路通常是具有一定關聯(lián)性的,與各個功能模塊關聯(lián)。當CC2530芯片的協(xié)調(diào)供電要求處于3.3V時對應傳感器的協(xié)調(diào)要求為3.5V。在這樣的背景之下,在電路的中心位置設計一個循環(huán)傳感預警裝置,裝置主要是將信號傳感器、探測控制器以及協(xié)調(diào)變化處理器相關聯(lián),此時形成雙向作用電路,而中心位置的循環(huán)電路就是復位電路。計算復位電路的復位系數(shù),具體如下:式中:P表示復位系數(shù),λ表示直流電壓變化值,φ表示交流電壓變化值。通過以上計算,最終可以得出實際的復位系數(shù),依據(jù)此系數(shù)設定對應的復位電路的協(xié)調(diào)標準。
位電路協(xié)調(diào)復位標準、協(xié)調(diào)動態(tài)取值分別為:返回距離50.35/62.31m、請求時間2.67/3.55s、路徑協(xié)調(diào)范圍4.25~6.27/1.25~4.35m、URL比0.25/0.15、異常參數(shù)3.42/3.51。根據(jù)以上數(shù)據(jù)信息,最終完成相應的標準設定。完成之后,在復位電路中設定局限電路,當系統(tǒng)執(zhí)行的過程中未在復位的實際范圍之內(nèi),則需要限制電路來對其作出阻斷,以此來避免電路發(fā)生大規(guī)模的關聯(lián)異常現(xiàn)象,確保系統(tǒng)穩(wěn)定執(zhí)行。
2 系統(tǒng)軟件設計
2.1 微服務架構下網(wǎng)源協(xié)調(diào)指令的設計
在完成硬件的設計之后,接下來,在此基礎上需要進一步進行軟件的相關設計。首先,在微服務架構之下對網(wǎng)源的協(xié)調(diào)指令作出設計。將初始系統(tǒng)中的數(shù)據(jù)信息導入新的移動端系統(tǒng)之中,并采集相關的協(xié)議傳輸數(shù)據(jù)。設定Lora節(jié)點并將其與相對應的基站互相關聯(lián)。在云服務器中將協(xié)議數(shù)據(jù)傳輸至新的系統(tǒng)之中,傳輸?shù)沫h(huán)境設定為websocket。此時需要依據(jù)傳輸?shù)臄?shù)據(jù)信息,計算系統(tǒng)網(wǎng)源協(xié)調(diào)指令的上行數(shù)據(jù)幀,并進行計算,具體如下:
式中:M表示上行數(shù)據(jù)幀,F(xiàn)表示實際的掃描幀數(shù),E表示固定數(shù)據(jù)幀數(shù),θ表示允許出現(xiàn)的最大幀數(shù)誤差。通過以上計算,最終可以得出實際的上行數(shù)據(jù)幀。將其與初始的上行到達應答幀、指令平衡幀相協(xié)調(diào),并通過掃描的方式來感應各個層級執(zhí)行應用設備。設定微服務的基礎架構,計算微服務的指令參數(shù),如下:N=φ-0.2c-2/3。
式中:N表示微服務的指令參數(shù),φ表示架構層級的實際設定數(shù)量,c表示異常數(shù)量。通過以上計算,最終可以得出實際的微服務的指令參數(shù)。將其設定添加在微服務的架構之中,并依據(jù)上述得出的數(shù)據(jù)信息,編制對應的網(wǎng)源協(xié)調(diào)指令,完成之后將指令設定在架構之中,形成多層級、多目標的重疊網(wǎng)源協(xié)調(diào)移動端系統(tǒng)架構,并完成協(xié)調(diào)指令的最終設計。
2.2 DMS協(xié)調(diào)交互控制結構的設計
在完成微服務架構下網(wǎng)源協(xié)調(diào)指令的設計之后,接下來需要設計DMS協(xié)調(diào)交互控制的結構。在微服務架構中建立DMS協(xié)調(diào)交互控制結構,結構的屬性設定為層級處理結構。DMS協(xié)調(diào)系數(shù)隨著網(wǎng)源的移動端的變化也會隨著發(fā)生變化,但需要注意的是,所產(chǎn)生的交互范圍也呈現(xiàn)出不穩(wěn)定的狀態(tài),交互范圍與結構的控制程度一般成反比,并與DMS協(xié)調(diào)系數(shù)相對應。所以計算實際的反比值具體如下:B=2/(5V+3X)-K+1。
式中:B表示實際的反比值,V表示DMS協(xié)調(diào)終止系數(shù),X表示端口預估作用值,K表示分布范圍。通過以上計算,最終得出實際的反比值。將其作為DMS協(xié)調(diào)交互控制的標準,并與微服務架構相結合,最終完成DMS協(xié)調(diào)交互控制結構的設計。
3 系統(tǒng)測試
本次主要是對微服務架構下網(wǎng)源協(xié)調(diào)移動端的系統(tǒng)設計效果進行測試。測試共分為三組,一組為傳統(tǒng)的Socker網(wǎng)源協(xié)調(diào)移動端的系統(tǒng),將其設定為傳統(tǒng)系統(tǒng)1;另一組為傳統(tǒng)的多目標網(wǎng)源協(xié)調(diào)移動端系統(tǒng),將其設定為傳統(tǒng)方系統(tǒng)2;最后一組文本文所設計的系統(tǒng),將其設定為微服務架構下的網(wǎng)源協(xié)調(diào)移動端系統(tǒng)。三組測試同時進行,并且是在相同的測試環(huán)境之下實現(xiàn)。完成以上設定之后,開始系統(tǒng)測試準備。
3.1 測試準備
經(jīng)過上述對系統(tǒng)測試的設定,接下來,進行測試的相關準備。首先,需要依據(jù)實際的運行情況,搭建系統(tǒng)測試的環(huán)境,具體如下:系統(tǒng)的服務器要選用云服務器,并將客戶端調(diào)整至多型號可接入的端口,運行環(huán)境設定為IE8/9/10/11。獲取系統(tǒng)日常的移動端活動情況,并采集相關的測試數(shù)據(jù)信息,并設定指標參數(shù),其固定標準與實測標準分別如下:接口響應時間0.52/0.67s、處理時間12.33/15.67、極限異常范圍0.24~0.66/0.31~0.59、網(wǎng)源協(xié)調(diào)系數(shù)比0.0062/0.0051。
根據(jù)以上指標參數(shù)的設定,完成相對應系統(tǒng)應用指標的設定。完成之后,在此基礎上依據(jù)上述采集的數(shù)據(jù)信息對系統(tǒng)的相關執(zhí)行數(shù)值進行計算,進行端口描述均值的計算如下:K=(2β+1)-4,式中:K表示描述均值,β表示返回系數(shù)表示協(xié)調(diào)均值,通過以上計算最終可以得出實際的描述均值。將描述均值作為系統(tǒng)執(zhí)行的初始標準,進行網(wǎng)源初始協(xié)調(diào)指令的編制,并計算其請求函數(shù),具體如下:H=(α+1)/2r+7δ-0.25。
式中:H表示系統(tǒng)的請求函數(shù),α表示指令的響應范圍,r表示實際的響應距離,δ表示設立的檢測節(jié)點。通過以上計算最終可以得出實際的系統(tǒng)請求函數(shù)。至此,便完成了系統(tǒng)的相關設定,檢查系統(tǒng)是否處于穩(wěn)定的運行狀態(tài),并確保不存在影響最終測試結果的外部因素,核查無誤后,開始系統(tǒng)測試。
3.2 測試過程及結果分析
在上述所搭建的系統(tǒng)測試環(huán)境之中,進行具體的測試。首先,選擇一組移動端頻進行測試,具體的測試流程如下圖1所示:
根據(jù)圖1中的測試,得出一組系統(tǒng)測試結果,再次對其他兩組也進行測試,將得出的結果匯總,作對比分析,具體如下表1所示:
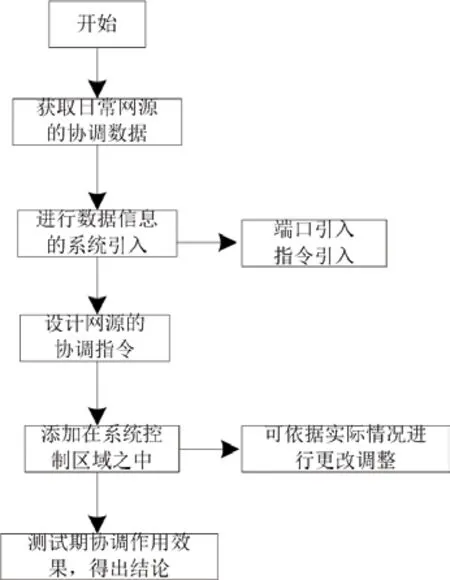
圖1 網(wǎng)源協(xié)調(diào)移動端系統(tǒng)測試流程圖
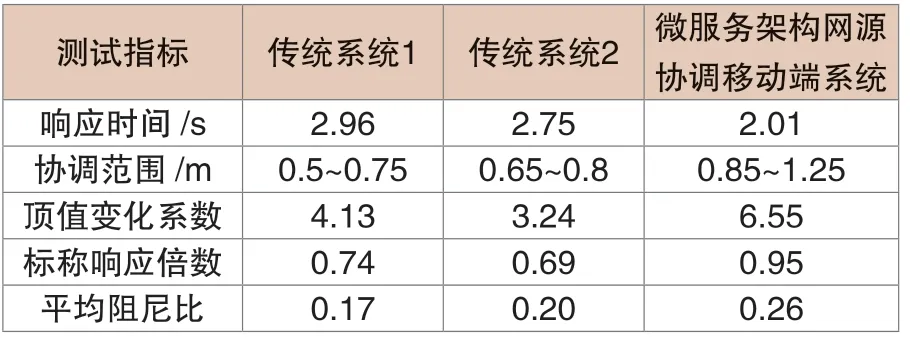
表1 系統(tǒng)測試結果對比分析表
根據(jù)表3中的數(shù)據(jù)信息得出最終的系統(tǒng)測試結果:在相同的測試環(huán)境之下,對比于兩種傳統(tǒng)系統(tǒng),本文所設計的系統(tǒng)得出的平均阻尼比相對更高,說明其對于網(wǎng)源的協(xié)議處理效果也較好,具有更強的實際應用價值。
綜上,便是對基于微服務架構的網(wǎng)源協(xié)調(diào)移動端的系統(tǒng)設計。網(wǎng)源協(xié)調(diào)的控制對于電網(wǎng)的日常運輸起到極為關鍵的作用,在微服務的架構下,不僅加強了系統(tǒng)子站和主站的監(jiān)測作用范圍,同時還添加了許多采集、上送運行信息、異常自動處理等協(xié)調(diào)功能,進一步完善移動端口的應變結構。不僅如此,微服務架構下的網(wǎng)源協(xié)調(diào)移動端的應用還進一步延伸了系統(tǒng)的校核功能。
對比于傳統(tǒng)的系統(tǒng),本文所設計的系統(tǒng)協(xié)調(diào)速度相對更快,可以進行實時存儲,并隨時調(diào)控執(zhí)行的信息,一旦網(wǎng)源發(fā)生故障或者異常的狀態(tài)系統(tǒng)會作出及時預警,避免對其造成關聯(lián)性的損害。所以,此系統(tǒng)具有更強的靈活性和實際應用性,可以在不同的電網(wǎng)環(huán)境之下進行應變、轉(zhuǎn)換以及處理,并制定貼合實際的方案,提升整體的協(xié)調(diào)效果,優(yōu)化系統(tǒng)的處理效率和質(zhì)量。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45