激光干涉測量系統(tǒng)非結(jié)構(gòu)性誤差的分析與補償
2022-02-17 08:43:08付純鶴連軍莉
電子工業(yè)專用設備 2022年6期
付純鶴,連軍莉,崔 莉
(中國電子科技集團公司第四十五研究所,北京 100176)
隨著微電子機械系統(tǒng)(Micro Electro Mechanical systems,MEMS)技術的發(fā)展,精密運動工作臺的應用范圍越來越廣,定位精度要求也越來越高。多自由度精密運動臺測量系統(tǒng)作為集成電路制造設備、精密測量儀器、精密加工機床等大型裝備的關鍵部件,不僅要求測量精度高,而且應具備量程大和測速高的能力。
激光干涉儀具有測量精度高、分辨率高和測量范圍大等優(yōu)點,在精密和超精密測量領域獲得了廣泛應用,用來進行高精度位移測量。由于激光干涉儀測量的分辨率相當高,達到納米量級,測量過程中容易受環(huán)境及其他因素的影響。測量誤差主要是激光干涉儀自身固有的結(jié)構(gòu)性誤差和非結(jié)構(gòu)性誤差,結(jié)構(gòu)性誤差主要為干涉儀光束不平行、安裝及運動過程中引起的阿貝與余弦誤差等;非結(jié)構(gòu)性誤差為系統(tǒng)誤差、環(huán)境誤差、測量系統(tǒng)自身的電路延時、測量數(shù)據(jù)滯后導致的延時誤差等。要確保測量精度足夠高,就必須分析誤差來源,有針對性地進行補償。
本文介紹了雙頻激光干涉測量系統(tǒng)以及激光干涉測量原理,并在此基礎上,對激光干涉測量的非結(jié)構(gòu)性誤差進行分析,包括激光波長、鏡面面形、數(shù)據(jù)延遲、反射鏡安裝非正交等誤差,并提供了相應的補償方法。
1 激光干涉儀測量原理
雙頻激光干涉儀利用多普勒頻移效應進行位移測量,將反射鏡與被測對象固聯(lián)在一起,通過測量反射鏡相對于參考反射鏡的位移來測量被測長度。它以激光波長為長度基準,能夠達到納米級分辨率,而且通過多個干涉儀的組合,還能夠同時測量角位移量。同時克服了零漂問題,具有很高的可靠性和抗干擾能力。
激光器輸出2種頻率f1、f2的雙頻激光,經(jīng)準直后經(jīng)1/4波片變?yōu)榇怪焙退降膬蓚€線偏振光,一部分被分光鏡反射作為參考光進入檢偏器I拍頻,以取得頻差為f2-f1的參考信號,用作測量基準,另一部分作為測量光束進入干涉儀,雙頻激光干涉儀的工作原理如圖1所示[1,2]。
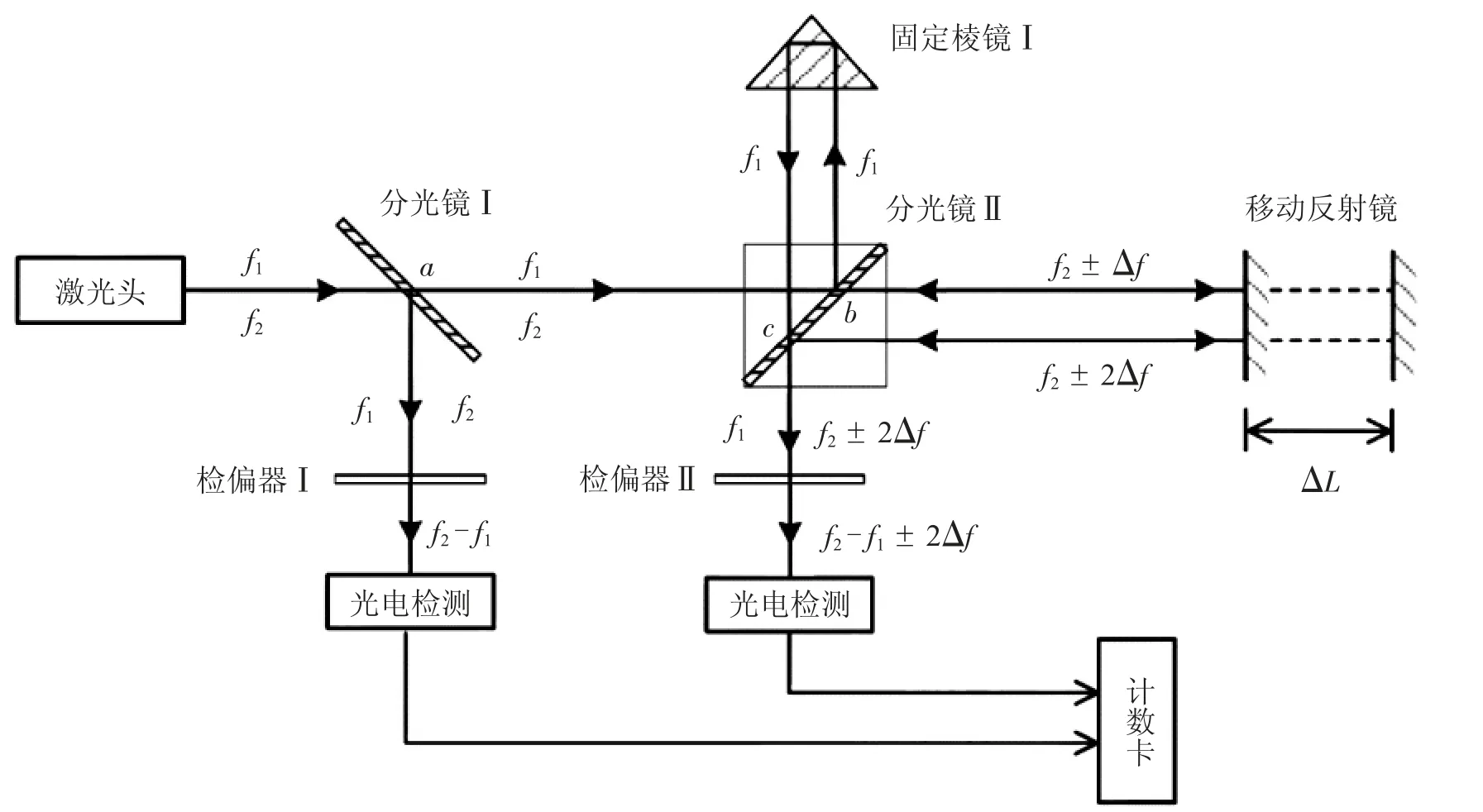
圖1 雙頻激光干涉儀測量原理
1.1 線位移測量原理
參考光和測量光經(jīng)過光電轉(zhuǎn)換單元和激光干涉儀計數(shù)卡的處理,即可以計算出由運動臺的速度v引起的△f,按照激光干涉儀原理公式可以求出運動速度v和位移△L。
激光干涉儀的基本公式為:
f2的頻率變化△f,該變化量包含了被測對象的運動信息,表示為:

其中,c為光速,v為測量反射鏡移動速度,f2為光頻。
激光的頻率f、波長λ和速度c之間的關系為:△f對時間積分可得到反射鏡移動的距離△L:


其中,λ為激光波長,N為與△f相關的計數(shù)值。
1.2 角位移測量原理
兩個干涉儀組合,可以用來測量物體的角位移,其原理如圖2所示。

圖2 激光干涉儀測量角位移示意圖(俯視圖)
x1與x2是相互平行且獨立的測量軸,其之間的距離為d,當運動臺偏轉(zhuǎn)一個角度θ時,由x1、x2測量軸測得的線位移量分別為lx1與lx2,那么θ可由下式計算出:

2 非結(jié)構(gòu)誤差分析與補償
激光干涉儀測量精度高,在實際測量條件下,有諸多因素會對測量系統(tǒng)產(chǎn)生干擾,從而引起測量誤差。結(jié)合具體項目,本文主要闡述了4個方面的非結(jié)構(gòu)性誤差:環(huán)境引起的激光波長變化,鏡面面形,數(shù)據(jù)延遲,反射鏡非正交。本節(jié)將對這些誤差產(chǎn)生的原因進行分析,并給出相應的誤差補償方法。
2.1 激光波長誤差
激光干涉儀的測量基準是激光波長,激光波長會隨著空氣折射率的變化而變化,空氣折射率會隨著周圍環(huán)境中空氣的溫度和氣壓的變化而變化。在實際應用中,空氣氣壓、溫度有緩慢的變化,會對空氣折射率產(chǎn)生直接影響,從而引起激光波長的變化而影響測量精度。
激光波長的計算公式為:

式(5)中,λwv為激光干涉儀光源在真空中的波長;λv為λwv經(jīng)過電子細分后的等效波長;
式(6)中,n為測量系統(tǒng)所處環(huán)境的空氣折射率,λ為測量系統(tǒng)所處環(huán)境的實際波長。
式(7)中,P為大氣壓強;T為溫度;
在運動臺工作環(huán)境中,空氣參數(shù)的變化比較緩慢,所以對氣溫和氣壓的采樣可以在較低的頻率下進行,當氣溫和氣壓發(fā)生變化時,需要重新計算λv,這樣就能對環(huán)境變化所產(chǎn)生的誤差進行補償。
2.2 鏡面面形誤差
由于加工工藝的制約,反射鏡面無法做到完全的平滑,精度大概為20~30 nm,其表面會有一定程度的形貌起伏,如圖3所示。

圖3 反射鏡面形示意圖
鏡面面形會帶來干涉儀光程的變化,從而引起測量誤差。運動臺在做Y向移動時,X向干涉儀的反射鏡面形會導致X向干涉儀的光程誤差△l,同時產(chǎn)生一個旋轉(zhuǎn)角度θRz。在納米級測量場景中,必須對反射鏡面形誤差進行補償。加工完成后,反射鏡的面形已經(jīng)固定。而且在實際應用中,測量光束近似處于反射鏡面上同一高度。鏡面面形誤差并不會引起全局模型的結(jié)構(gòu)性變化,只是在最終結(jié)果上對每個自由度產(chǎn)生一個額外的誤差,所以,對這種誤差的補償也是比較簡單的,補償量即相關形貌函數(shù)的線性疊加。
文獻[3]中結(jié)合實際應用背景,提出一種新的反射鏡不平度測量方法,以反射鏡平移補償量與旋轉(zhuǎn)補償量為測量目標,采用多序列的方法對運動臺位置和旋轉(zhuǎn)量進行測量,通過樣條插值與最小二乘原理平滑連接所有測量序列,并計算出精確的反射鏡不平度。
通過上述測量方法,會得到一組鏡面面形函數(shù),以數(shù)組形式存儲,用于誤差補償。通過線性插值的方法,對反射鏡面形誤差進行補償,具體補償如下:

其中:
X,Y,θRzx,θRzy:表示當前測量的運動臺位置;
Xm,Ym,θRzxm,θRzym:表示面形補償后的運動臺位置;
fYTX,fYRZ,fXTY,fXRZ:表示面形函數(shù);
ix1,ix2,iy1,iy2:表示X和Y面形函數(shù)的索引;
kx1,kx2,ky1,ky2:表示相應索引的權(quán)重。
2.3 數(shù)據(jù)延遲誤差
高精度運動臺具有很高的掃描速度,同時要求測量精度達到納米級。測量系統(tǒng)中的光路與電路延時會造成數(shù)據(jù)滯后,引起測量位置誤差。低速運行或者測量精度要求不高時,數(shù)據(jù)延遲在低速運動時產(chǎn)生的誤差可以忽略不計。但運動臺全速運行時,數(shù)據(jù)滯后會嚴重影響到測量精度。所以必須對其進行補償,從而滿足測量系統(tǒng)的超高精度要求。
數(shù)據(jù)延遲包括測量信號延時、信號處理延時、數(shù)據(jù)輸出延時等。在硬件設備布局中數(shù)據(jù)延遲是固定的,引入的誤差與運動臺速度成正比。這種誤差屬于測量結(jié)構(gòu)外的誤差,只需在最終測量結(jié)果上進行修正。掃描方向的補償量為:

式(12)中的d0和dv分別是延時補償前的位置和補償后的運動臺位置,v是運動臺的掃描速度,tdelay是與數(shù)據(jù)延遲相關的機械參數(shù),需要在校準過程中確定。
2.4 反射鏡非正交誤差
在激光干涉測量系統(tǒng)中,反射鏡安裝在運動臺的側(cè)面。反射鏡的非正交夾角θ導致了干涉儀測量系統(tǒng)的非正交性。在測量或加工過程中,非正交會導致的位移誤差。

圖4 加工位置1
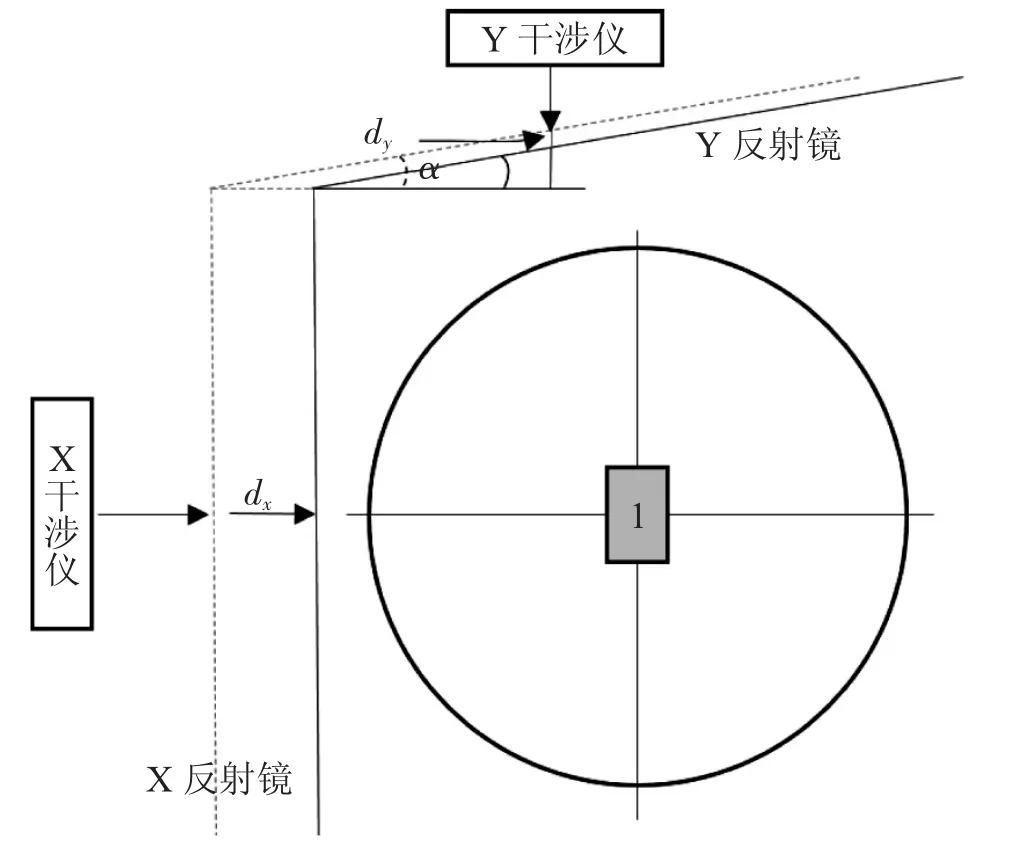
圖5 沿X軸移動dx后
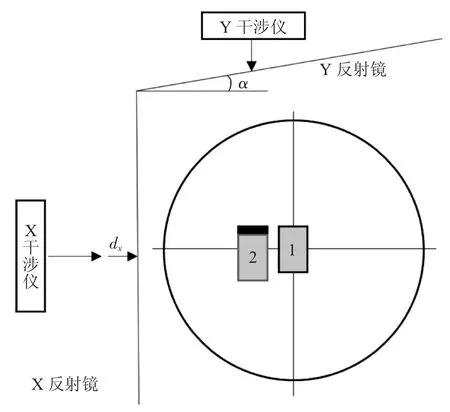
圖6 加工位置2

圖7 加工的總體情況
圖4 中,當運動臺位于加工位置1時,加工位置為(px,py);圖5中,當運動臺沿X向移動dx時,因為反射鏡非正交的存在,導致Y向位置發(fā)生了變化dy。為了保證在(px+dx,py)位置進行準確加工,運動臺會在Y向向上移動一段距離dx·tgα,使得運動臺當前的測量位置為py,然后進行加工,最終位置2的圖形加工位置會產(chǎn)生偏移,如圖6所示。圖7是加工一行圖形的效果圖,可以看出,所有的圖形位置發(fā)生了偏移。
為了消除誤差,文獻[4]結(jié)合實際應用背景,提出一種測量激光干涉儀測量系統(tǒng)非正交性的新方法。該方法使用了晶圓曝光,精確測量干涉儀測量系統(tǒng)的非正交因子和坐標軸尺度偏差,考慮到曝光過程對干涉儀測量系統(tǒng)的影響,因而檢測結(jié)果更加準確。
長條鏡安裝之后,在一段時間內(nèi)非正交誤差也就固定,并且只產(chǎn)生在某一個方向,只需在最終測量結(jié)果上進行修正。通常情況下,θRzx伺服控制運動臺,則此種情況下非正交的補償量為:

式(13)中的dy是由非正交引起的Y向位置補償量,dx是X向的位移量,sxy是非正交因子。
3 結(jié)束語
本文介紹了雙頻激光干涉儀的測量原理,深入分析了4種干涉儀非結(jié)構(gòu)性誤差,提出了相應的補償方法。其中,鏡面形誤差、環(huán)境誤差、反射鏡非正交誤差等誤差補償算法及其軟件仿真均在實際研發(fā)過程中已得以應用,并在運動臺系統(tǒng)中進行實際驗證,效果良好,有效地消除了非結(jié)構(gòu)性誤差對整個測量系統(tǒng)的影響。
激光干涉測量系統(tǒng)在工作前,需要對誤差參數(shù)進行預先標定。其次,根據(jù)裝配條件和工作狀況,誤差參數(shù)可能會發(fā)生變化,需要定期進行重新標定,確保了測量系統(tǒng)的精度。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
