基于全站掃描儀的真配對點形變計算及點面優化
2022-02-18 05:57:44吳金波張曉春楊聃朱悅林陳俊濤蘇凱
水利水電快報 2022年1期
吳金波 張曉春 楊聃 朱悅林 陳俊濤 蘇凱
摘要:水電站廠房內設備傳統變形監測采用點測量方式,無法反映整體變形特征,而全站掃描儀可快速采集目標表面點云,通過點云處理得到形變量。基于全站掃描儀提出了真配對點的形變計算方法,根據后方交會法設計方案,采集兩期點云數據,然后基于真配對點計算形變量并通過點面優化算法減少誤差,最后驗證了形變計算方法的精度。設計了兩個模擬試驗驗證算法的可行性,通過細繩模擬輸電線路弧垂變形和箱體外加錐體模擬殼體鼓包變形,在試驗對象上施加外力使其產生形變,并精確測量形變量作為形變參考值。試驗結果表明:兩個模擬試驗的形變計算誤差分別為0.146 mm和0.056 mm,精度可達亞毫米級。該形變計算方法能夠較好地應用于設施設備變形監測領域。
關鍵詞:形變計算; 全站掃描儀; 后方交會法; 孤立點云選取
中圖法分類號:TV698.1 文獻標志碼:A DOI:10.15974/j.cnki.slsdkb.2022.01.006
文章編號:1006 - 0081(2022)01 - 0029 - 08
0 引 言
傳統的變形監測是以點測量技術為主,采用水準儀、全站儀等儀器測定監測點的三維坐標,然后利用坐標值進行形變量的計算和分析[1]。近年來,隨著三維激光掃描技術的發展,國內外學者開始用三維激光掃描儀進行變形監測研究。Zhou 等[2]通過地面三維激光掃描儀獲取點云數據,建立數字高程模型相減得到礦區地表動態沉降量。梅文勝等[3]對某鐵路經過區域進行外業作業,通過后處理軟件進行地物和地貌提取,繪制等高線地形圖。盧秀山等[4]運用車載式激光掃描儀和CCD相機獲取城市信息,提取建筑物特征實現三維模型重建。謝雄耀等[5]對上海地區服役電力塔進行三維激光掃描監測,通過擬合鐵塔點云軸線判斷其傾斜度。劉求龍等[6]利用地面三維激光掃描儀獲取惠泉變電站的空間數據,建立三維空間可視化模型,提供了三維激光掃描儀運用于變電站的新思路。HASAN 等[7]使用三維激光掃描技術對水工建筑物的混凝土表面磨損和體積損失進行分析。
三維激光掃描儀可以非接觸式掃描得到點云數據,但測距測角精度沒有全站儀高,且每站掃描為獨立坐標系,在實際應用中會造成不便。而全站掃描儀集成了多項先進的測量技術,是近年來的一項重要技術革新[8]。全站掃描儀可以進行傳統的全站儀測量和三維掃描測量,不僅能獲取高精度的單點坐標以計算目標的剛體位移,還能獲取目標的點云數據,計算局部形變量[9]。相較于三維激光掃描儀,全站掃描儀具有更高的精度,可定點并用后方交會法設站,在同一坐標系下進行掃描,無需點云拼接,避免復雜的數據配準工作[10]。全站掃描儀無需布設監測點,在水電站廠房中部分設備的運行期間不允許工作人員接近、無法在設備上布設監測點的情況下,非接觸測量技術可在遠離目標處通過線掃描獲取點云數據,實現安全高效的非接觸測量。
對水電站廠房內設備進行變形監測,在形變預警前采取控制措施以避免設備故障影響生產工作,保證水電站發出的電能通過輸電線路并入電網,具有重要而深遠的意義。為驗證本文算法的可行性,設計了兩個試驗模擬重要設備的常見變形:試驗一模擬覆冰荷載、風荷載等常見荷載對輸電線路的影響;試驗二模擬內部過電壓對主變壓器的影響,以此驗證算法精度。
1 研究方案
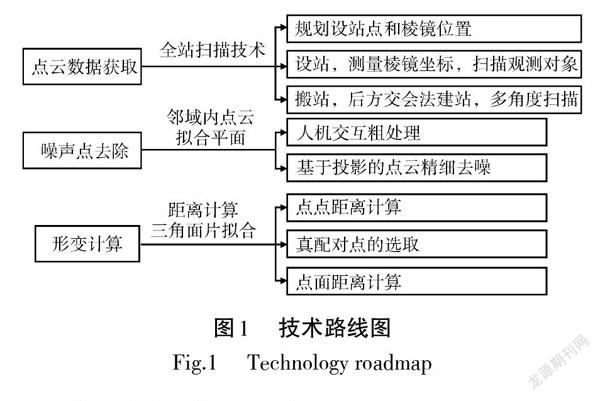
本文擬采集兩期全站掃描儀數據進行形變分析。初始點云數據中存在噪聲點,對形變量計算產生干擾,影響試驗精度。首先,需要對采集到的點云數據進行預處理,通過人機交互和基于投影的點云去噪算法剔除噪聲點。然后,針對去噪后的多期點云數據,通過點與點之間的最小距離選擇真配對點,先以真配對點之間的距離計算形變量,再運用優化算法減少誤差,提高形變量計算的準確性,輸出形變結果。具體技術路線圖如圖1所示。
2 點云數據獲取及去噪
2.1 點云數據獲取
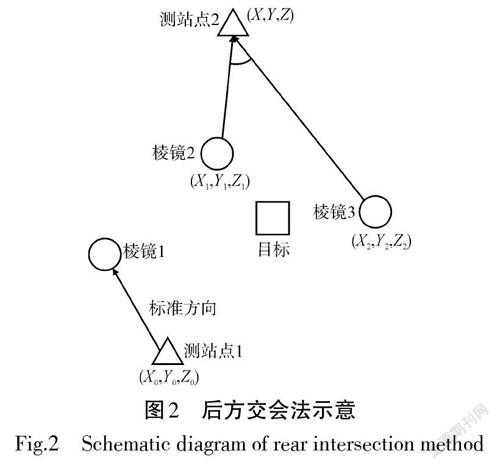
全站掃描儀主要是運用“后視點+測站點”的采集方式,兼具普通全站儀和掃描儀的功能,因此全站掃描儀獲取點云數據無需進行配準。掃描目標前,應圍繞掃描目標規劃好測站點和棱鏡位置,如圖2所示。因需要獲取兩期點云數據來計算形變量,并且要保證兩期點云的坐標系統一致,所以兩期點云掃描時的測站點和棱鏡位置也應相同。每期點云數據獲取工作步驟如下:
(1) 在測站點1位置放置全站掃描儀,并對中整平,設置為初始測站坐標(X0,Y0,Z0)。應盡量讓儀器能夠掃描到目標整體,并在視野開闊位置設置3個后視點放置棱鏡。
(2) 完成測站點1的初始設站后,選擇棱鏡1作為標準方向,通過全站掃描儀的“測量”模式測量儀器到每個棱鏡的距離、水平角和豎直角,以此計算棱鏡的三維坐標(Xi,Yi,Zi)(i=1,2,…),獲取多個已知點來確定測量坐標系統。
(3) 對目標進行掃描,得到本站點能觀測到的部分目標點云數據。
(4) 初始測站觀測完成后,搬至規劃的測站點2,通過步驟(2)得到的棱鏡坐標和后方交會法得到測站點2的三維坐標,然后在測站點2建站,并在此站點以新的觀測角度掃描目標。
后方交會法是利用測站點2位置測量儀器到已知棱鏡點的距離、水平角和豎直角,以此計算新站點的三維坐標(X,Y,Z)。點云數據獲取及后方交會法示意見圖2。圖2中,初始測站(X0,Y0,Z0)、棱鏡點(Xi,Yi,Zi)、新站點(X,Y,Z)都在同一個坐標系內。此方法可在合適的點設站,并計算同一個測量坐標系下任意新站點的三維坐標,進行點云采集及處理,無需數據配準。
2.2 噪聲點去除
在掃描獲取點云數據的過程中,由于儀器誤差、掃描區域過大、被測物體表面差異引起反射不同、邊緣效應等原因,產生冗余點即點云噪聲[11]。而噪聲點的存在會對后續的點云處理和三維建模過程造成一定影響。所以,要對初始點云數據進行去噪。本文采取人機交互和基于投影的去噪算法分別進行粗去噪和細去噪,消除噪聲點的干擾。
2.2.1 基于人機交互的粗去噪
針對可肉眼辨別的非目標點云,可直接在點云模型中,通過人機交互的方式,選中并刪除噪聲點。手動框選時,應盡可能做到細致、謹慎,避免錯誤刪除目標主體點云。對于偏離目標主體點云的浮游噪聲點,也可以通過孤立點云的選取算法選中后剔除,如圖3所示。孤立點云選取算法的原理是首先設定一個距離閾值和最大選取點云數量,例如,圖3中距離閾值為r,取值一般小于20 cm。本文通過計算點云中兩點之間的距離,排序后以1 cm為劃分區間,統計各區間中點云數量最多的兩個,求平均值得到r=5.5 cm。然后,由主體點云中的初始中心點向外搜索半徑為r的范圍。圖3中1號點為初始中心點,其搜索范圍內有2,3,6號點,再以2,3,6號點作為下一次搜索的中心點進行半徑為r的搜索,直至沒有新的點可以被覆蓋或點云數量已達到最大值時停止。剩余點云作為浮游噪聲點予以去除,如圖3中的9,10號點。
2.2.2 基于投影的點云精細去噪
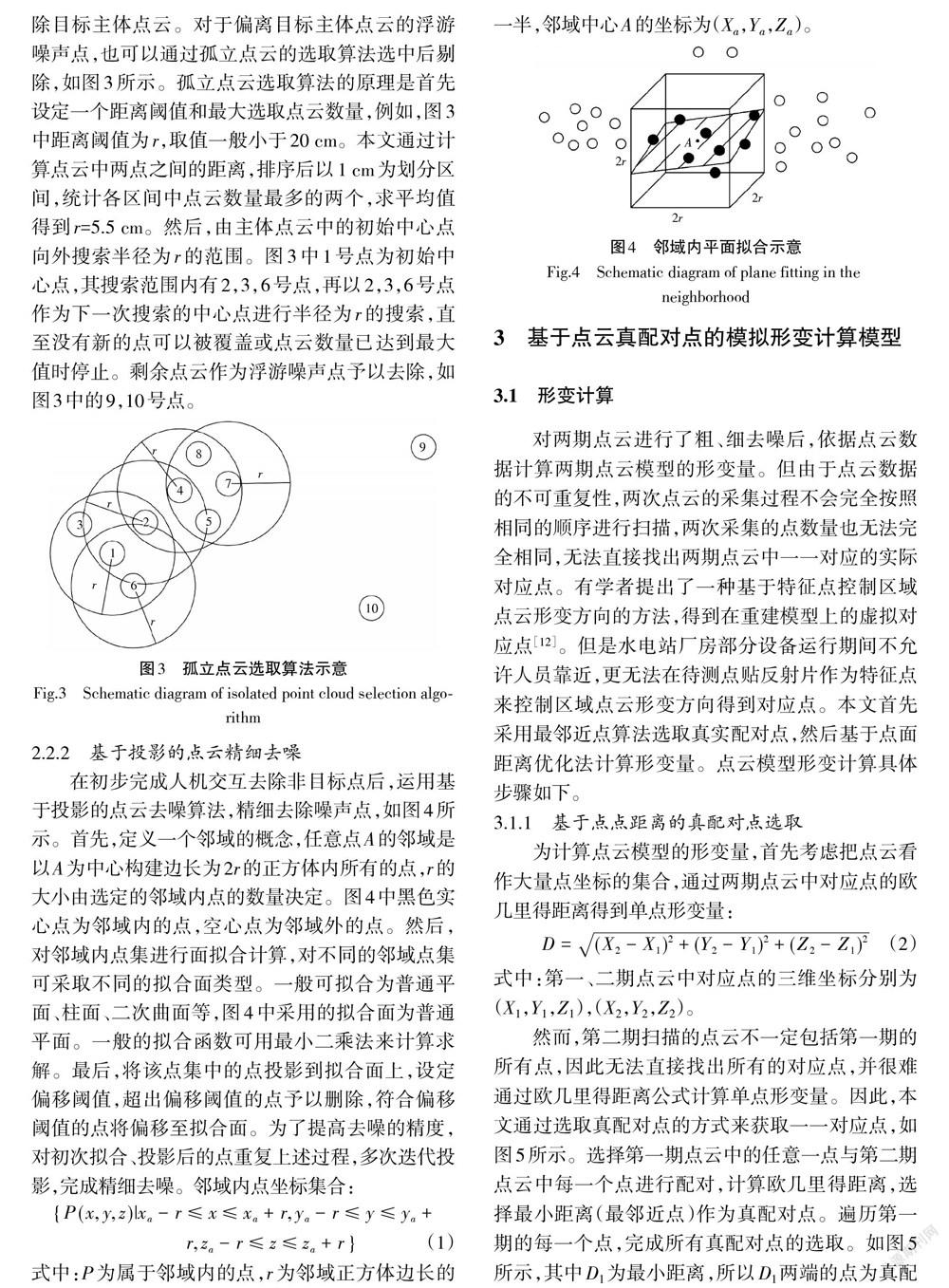
在初步完成人機交互去除非目標點后,運用基于投影的點云去噪算法,精細去除噪聲點,如圖4所示。首先,定義一個鄰域的概念,任意點A的鄰域是以A為中心構建邊長為2r的正方體內所有的點,r的大小由選定的鄰域內點的數量決定。圖4中黑色實心點為鄰域內的點,空心點為鄰域外的點。然后,對鄰域內點集進行面擬合計算,對不同的鄰域點集可采取不同的擬合面類型。一般可擬合為普通平面、柱面、二次曲面等,圖4中采用的擬合面為普通平面。一般的擬合函數可用最小二乘法來計算求解。最后,將該點集中的點投影到擬合面上,設定偏移閾值,超出偏移閾值的點予以刪除,符合偏移閾值的點將偏移至擬合面。為了提高去噪的精度,對初次擬合、投影后的點重復上述過程,多次迭代投影,完成精細去噪。鄰域內點坐標集合:
[{P(x, y, z)|xa-r≤x≤xa+r, ya-r≤y≤ya+]
[r, za-r≤z≤za+r}] ? ? ? ? ? ? ? (1)
式中:P為屬于鄰域內的點,r為鄰域正方體邊長的一半,鄰域中心A的坐標為(Xa,Ya,Za)。
3 基于點云真配對點的模擬形變計算模型
3.1 形變計算
對兩期點云進行了粗、細去噪后,依據點云數據計算兩期點云模型的形變量。但由于點云數據的不可重復性,兩次點云的采集過程不會完全按照相同的順序進行掃描,兩次采集的點數量也無法完全相同,無法直接找出兩期點云中一一對應的實際對應點。有學者提出了一種基于特征點控制區域點云形變方向的方法,得到在重建模型上的虛擬對應點[12]。但是水電站廠房部分設備運行期間不允許人員靠近,更無法在待測點貼反射片作為特征點來控制區域點云形變方向得到對應點。本文首先采用最鄰近點算法選取真實配對點,然后基于點面距離優化法計算形變量。點云模型形變計算具體步驟如下。
3.1.1 基于點點距離的真配對點選取
為計算點云模型的形變量,首先考慮把點云看作大量點坐標的集合,通過兩期點云中對應點的歐幾里得距離得到單點形變量:
[D=(X2-X1)2+(Y2-Y1)2+(Z2-Z1)2] ? ?(2)
式中:第一、二期點云中對應點的三維坐標分別為(X1,Y1,Z1),(X2,Y2,Z2)。
然而,第二期掃描的點云不一定包括第一期的所有點,因此無法直接找出所有的對應點,并很難通過歐幾里得距離公式計算單點形變量。因此,本文通過選取真配對點的方式來獲取一一對應點,如圖5所示。選擇第一期點云中的任意一點與第二期點云中每一個點進行配對,計算歐幾里得距離,選擇最小距離(最鄰近點)作為真配對點。遍歷第一期的每一個點,完成所有真配對點的選取。如圖5所示,其中D1為最小距離,所以D1兩端的點為真配對點,真配對點選取對應公式為
D=min{D1,D2,D3,…,Dn} ? ? ? ? ? ? ? ? ? ? ? (3)
3.1.2 基于點面距離優化法的形變量計算
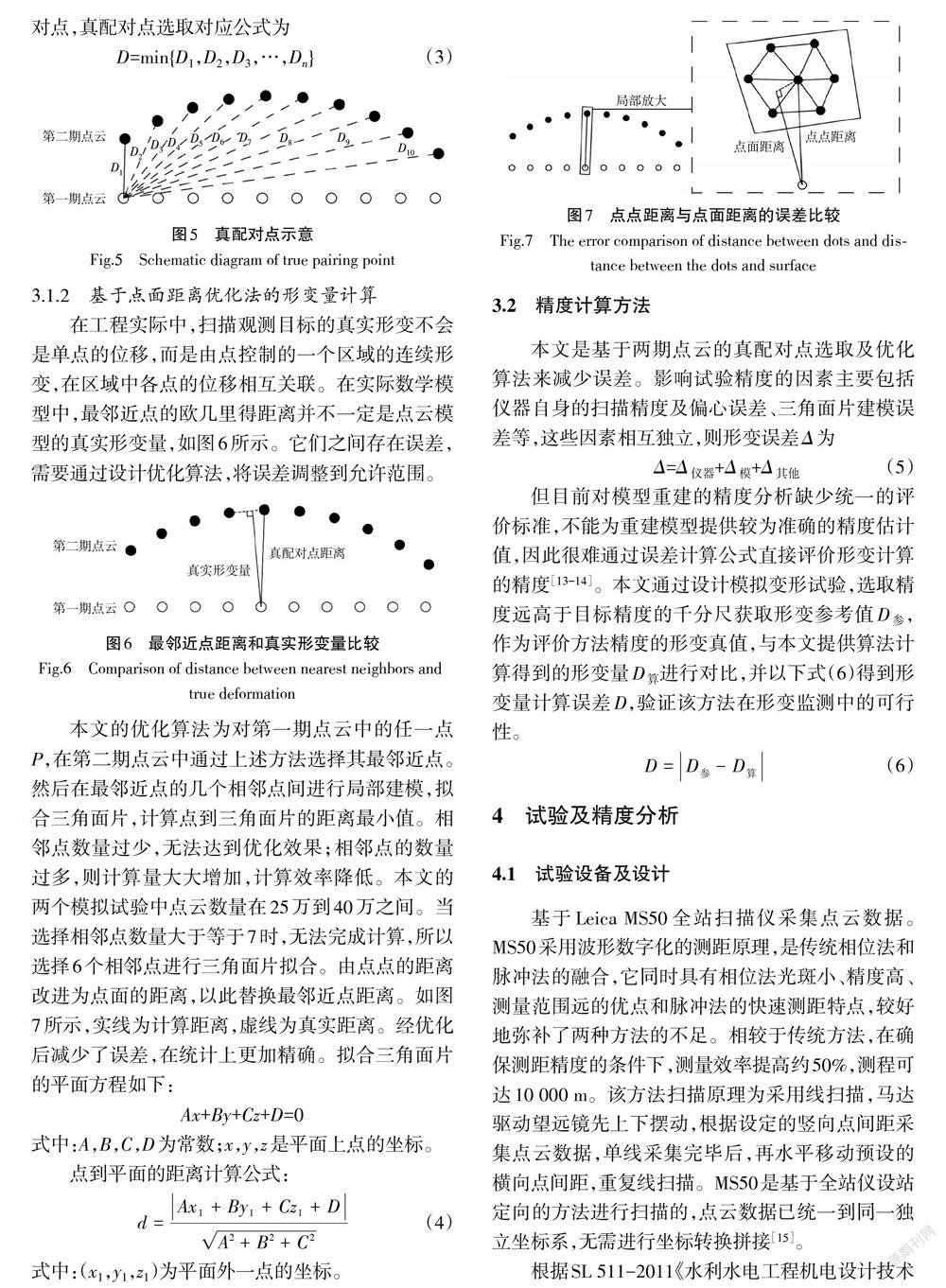
在工程實際中,掃描觀測目標的真實形變不會是單點的位移,而是由點控制的一個區域的連續形變,在區域中各點的位移相互關聯。在實際數學模型中,最鄰近點的歐幾里得距離并不一定是點云模型的真實形變量,如圖6所示。它們之間存在誤差,需要通過設計優化算法,將誤差調整到允許范圍。
本文的優化算法為對第一期點云中的任一點P,在第二期點云中通過上述方法選擇其最鄰近點。然后在最鄰近點的幾個相鄰點間進行局部建模,擬合三角面片,計算點到三角面片的距離最小值。相鄰點數量過少,無法達到優化效果;相鄰點的數量過多,則計算量大大增加,計算效率降低。本文的兩個模擬試驗中點云數量在25萬到40萬之間。當選擇相鄰點數量大于等于7時,無法完成計算,所以選擇6個相鄰點進行三角面片擬合。由點點的距離改進為點面的距離,以此替換最鄰近點距離。如圖7所示,實線為計算距離,虛線為真實距離。經優化后減少了誤差,在統計上更加精確。擬合三角面片的平面方程如下:
Ax+By+Cz+D=0
式中:A,B,C,D為常數;x,y,z是平面上點的坐標。
點到平面的距離計算公式:
[d=Ax1+By1+Cz1+DA2+B2+C2] ? ?(4)
式中:(x1,y1,z1)為平面外一點的坐標。
3.2 精度計算方法
本文是基于兩期點云的真配對點選取及優化算法來減少誤差。影響試驗精度的因素主要包括儀器自身的掃描精度及偏心誤差、三角面片建模誤差等,這些因素相互獨立,則形變誤差Δ為
Δ=Δ儀器+Δ模+Δ其他 ? ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
但目前對模型重建的精度分析缺少統一的評價標準,不能為重建模型提供較為準確的精度估計值,因此很難通過誤差計算公式直接評價形變計算的精度[13-14]。本文通過設計模擬變形試驗,選取精度遠高于目標精度的千分尺獲取形變參考值D參,作為評價方法精度的形變真值,與本文提供算法計算得到的形變量D算進行對比,并以下式(6)得到形變量計算誤差D,驗證該方法在形變監測中的可行性。
[D=D參-D算] (6)
4 試驗及精度分析
4.1 試驗設備及設計
基于Leica MS50全站掃描儀采集點云數據。MS50采用波形數字化的測距原理,是傳統相位法和脈沖法的融合,它同時具有相位法光斑小、精度高、測量范圍遠的優點和脈沖法的快速測距特點,較好地彌補了兩種方法的不足。相較于傳統方法,在確保測距精度的條件下,測量效率提高約50%,測程可達10 000 m。該方法掃描原理為采用線掃描,馬達驅動望遠鏡先上下擺動,根據設定的豎向點間距采集點云數據,單線采集完畢后,再水平移動預設的橫向點間距,重復線掃描。MS50是基于全站儀設站定向的方法進行掃描的,點云數據已統一到同一獨立坐標系,無需進行坐標轉換拼接[15]。
根據SL 511-2011《水利水電工程機電設計技術規范》,為保證水利水電工程的安全穩定運行,水電廠電氣主接線應滿足穩定性、可靠性的要求,并結合考慮樞紐總體布置、地形和設備特點等因素[16]。水電站輸電線路常在覆冰荷載、風荷載的作用下產生變形,影響水電站電能輸送。覆冰可能會導致鐵塔兩側的導線產生縱向不平衡張力,導線懸垂高度變化及鐵塔拉、壓破壞[17]。風荷載使導線舞動,舞動幅度過大則會導致鐵塔的直接損傷,嚴重威脅輸電線路的安全運行[18]。水電站主變壓器和高壓配電裝置在系統發生電路故障時,或惡劣天氣條件下可能會產生殼體變形。當發生線性諧振過電壓時,會造成絕緣擊穿,導致內部氣壓增加而出現殼體鼓包。
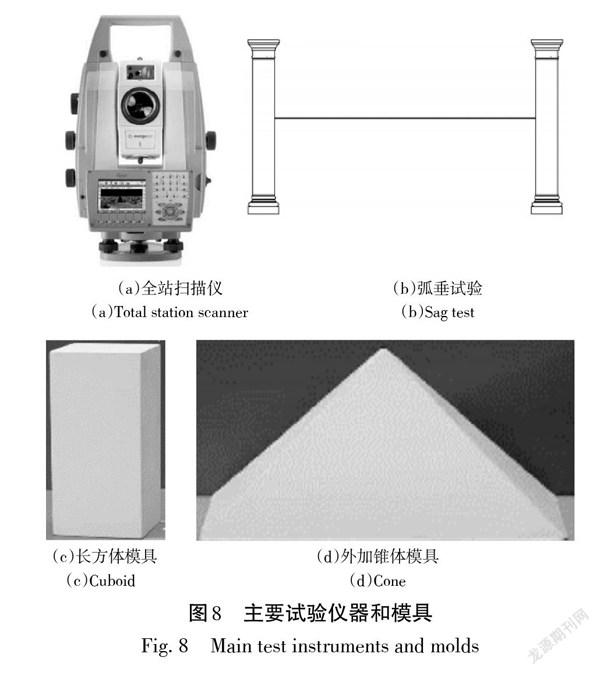
根據《水利水電工程機電設計技術規范》和工作人員提供的水電站廠房內設備的常見變形情況,本文將設計試驗模擬輸電線路受冰雪荷載、風荷載的弧垂變形和變壓器內部過電壓產生的殼體鼓包變形,通過精度高于全站掃描儀測量精度的千分尺測量得到形變參考值,與本文算法得到的計算值進行比較,驗證精度。主要試驗儀器和模具如圖8所示。
4.2 試驗方法
4.2.1 試驗一:輸電線路弧垂變形試驗
試驗一是用固定在兩柱之間的繩子模擬電線桿之間的輸電線路,用繩子由水平到中心略微懸垂模擬冰雪荷載和風荷載作用下舞動造成輸電線路弧垂變化。通過保持兩端點位置固定,將兩端點內繩子長度增加使其中心自然下降一定距離,通過精度可達1 μm的千分尺測量得到繩子中心下降前后的距離,得到最大參考形變量。
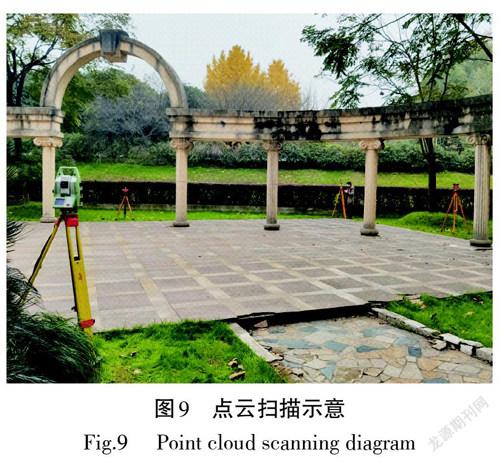
首先在選定兩柱水平對應位置綁上繩子,調整長度使其繃直。選擇一個位置作為初始測站點安置全站掃描儀,進行對中整平。在目標周圍設立棱鏡作為后視點,選用“測量”模式采集棱鏡的三維坐標。選用全站掃描儀“測量+”模式對目標進行三維激光掃描,掃描完畢后搬站。以后方交會法計算新站點的設站坐標,使得每一站都在同一個坐標系下,再對目標進行三維激光掃描。多次搬站使得點云掃描范圍包含目標的各個角度,第一期掃描完成得到相應的目標點云數據。點云掃描示意如圖9所示。
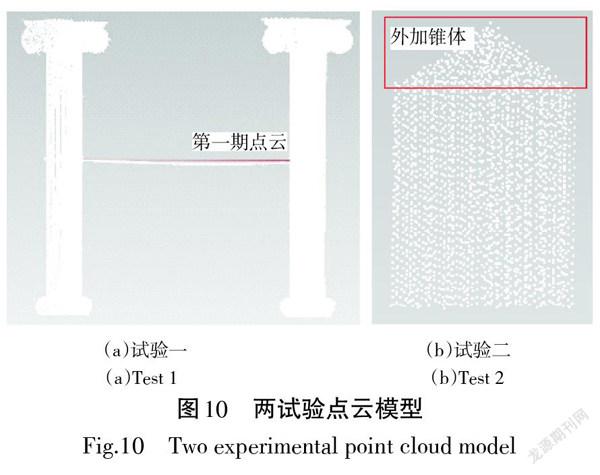
固定端點位置,調整繩子長度,使其懸吊,靜待一段時間直至繩子不再晃動且繩子中心下降距離穩定。然后,重復上述設站掃描過程,得到第二期點云數據。根據本文提出的形變計算方法對兩期點云進行形變計算,并和用千分尺測量得到的形變參考值比較驗證精度。圖10(a)中紅色線為第一期繩的點云,其他白色部分為第二期點云。
4.2.2 試驗二:殼體鼓包變形試驗
試驗二是采用在原始目標上外加錐體來模擬過電壓、過電流引起的設備殼體鼓包形變。如圖8(c)所示的長方體為第一期掃描對象,圖8(d)為第二期外加錐體,用以模擬水電站廠房設備由于內部絕緣擊穿引起的殼體鼓包變形。首先,進行第一期點云掃描,即僅掃描原始長方體,用以模擬設備未發生形變的狀態。選定初始測站點,放置棱鏡作為后視點,在初始測站點建站,通過“測量”模式采集棱鏡的三維坐標;然后,運用“測量+”模式掃描原始長方體。掃描完成后搬站并用后方交會法計算得到在同一坐標系下新站點的三維坐標,再次對目標進行掃描。整個掃描過程應使目標能夠被完整掃描,并且固定長方體位置,避免在水平方向上移動。之后進行第二期點云掃描,即在長方體上表面外加錐體進行掃描,用以模擬設備上表面的鼓包變形,重復以上掃描過程。最后,對比兩期點云計算形變量,并與參考值進行比較分析。參考值是通過千分尺測量錐頂到錐底的垂直距離,即為最大參考形變量。圖10(b)白色部分為第二期點云,其中紅色框內為第二期外加錐體的點云。
4.3 試驗結果與精度分析
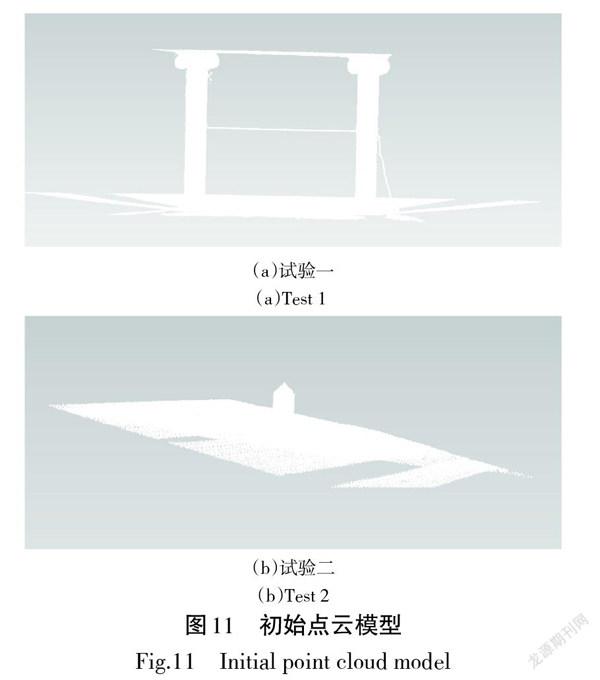
首先,導入全站掃描儀多站點測得的點云數據,初始點云模型如圖11所示。
以試驗一第一期點云為例,為消除噪聲點的影響,先基于人機交互粗去噪,選中并去除肉眼可見的地面點云。對于偏離目標主體點云的浮游噪聲點,則通過孤立點云的選取算法選中后剔除,首先計算點云模型中兩點之間的距離,將計算得到的所有點對距離排序后以1 cm為劃分區間,統計各區間中點云數量,選擇點云數量最多的兩個區間,求平均值得到r=5.5 cm。未去噪前點云數量為41萬,經估算,目標主體點云應在35萬以內,所以設置距離閾值r=5.5 cm,最大選取點云數量N=35 0000個進行孤立點云選取,選中后刪除浮游噪聲點。試驗二設置距離閾值r=1.5 cm,最大選取點云數量N=10 000個。
對去噪完成后的點云進行真配對點選取,選擇變形前的第一期點云中的某一點P,運用歐幾里得距離公式計算其與第二期點云中每一個點的三維距離Di,用最小值函數比較得到距離的最小值,最小距離對應的第二期點云中的點P*即為真配對點。為提高精度,實現由單點控制的一個區域內的連續變形測量,對P*及其周圍的6個相鄰點分別進行三角面片擬合,并計算P到這些三角面片的點面距離,取點面距離的最小值為計算結果。將上述過程遍歷兩個試驗的第一期點云,形變計算的最大值為驗證形變誤差的計算形變量D算。完成預處理后的點云模型如圖11所示。
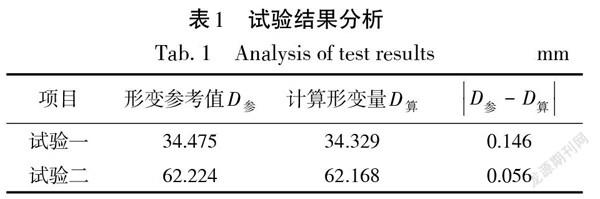
基于本文提出的兩期點云真配對點選取和優化算法,計算形變量。兩個試驗用千分尺測得的形變參考值D參和基于本文算法優化后得到計算形變量D算如下表1所示,由式(6)計算得到形變量計算誤差。
由表1可看出,基于兩期點云真配對點形變量的計算誤差均小于0.250 mm,滿足水電站廠房設備變形監測的毫米級要求。試驗結果表明,本文提出的搜索真配對點,將點面之間的最小距離作為形變計算結果的方法,具有較高的計算精度。
5 結 論
本文針對水電站廠房設備的變形監測,提出基于真配對點的形變計算方法,并設計了模擬設備變形的試驗,根據試驗結果得出以下結論:
(1) 傳統變形監測只能采取單點測量和接觸式測量,基于全站掃描儀的變形監測具有面測量及非接觸式測量等優勢。
(2) 基于本文監測方法可以滿足非接觸測量要求,即不需在觀測目標上標定特征點,通過選取真配對點計算形變量,利用點面距離優化算法減少誤差。
(3) 本文設計了兩個變形模擬試驗,對水電站廠房輸電線路弧垂變形和殼體鼓包變形進行模擬,將計算形變量和形變參考值進行比較,驗證方法精度。
(4) 試驗計算結果與參考值之間誤差小于0.250 mm,達到亞毫米級精度要求,驗證了本文計算方法的可行性和可靠性。
參考文獻:
[1] 劉備. 電力工程變形監測數據處理分析與系統實現[D]. 青島:山東科技大學,2018.
[2] ZHOU D, WU K, CHEN R, et al. GPS/terrestrial 3D laser scanner combined monitoring technology for coal mining subsidence: a case study of a coal mining area in Hebei, China[J]. Natural Hazards,2014,70(2):1197-1208.
[3] 梅文勝,周燕芳,周俊. 基于地面三維激光掃描的精細地形測繪[J]. 測繪通報,2010(1):53-56.
[4] 盧秀山,李清泉,馮文灝,等. 車載式城市信息采集與三維建模系統[J]. 武漢大學學報(工學版),2003(3):76-80.
[5] 謝雄耀,姜毅,盧曉智,等. 超高壓服役桿塔病害及三維激光掃描檢測技術[J]. 地下空間與工程學報,2014,10(3):668-674.
[6] 劉求龍,胡伍生,王驄,等. 三維激光掃描儀在惠泉變電站三維模型構建中的應用[J]. 測繪科學,2011,36(2):210-212.
[7] HASAN M S, LI S S, ZSAKI A M, et al. Measurement of abrasion on concrete surfaces with 3D Scanning technology[J]. Journal of Materials in Civil Engineering, 2019, 31(10):04019207-1-8.
[8] 李東敏,范百興,周蘊,等. 全站式掃描儀測量原理及精度分析[J]. 測繪通報,2014(8):131-133.
[9] 汪沖. 全站掃描儀測量精度分析及其在變形監測中的應用[D]. 鄭州:中國人民解放軍戰略支援部隊信息工程大學,2018.
[10] 張教權,左美蓉,喻艷梅. 施工測量中后方交會法的應用[J]. 科技創新導報,2010(22):44-45.
[11] 劉靜靜. 三維點云重建中的去噪算法研究[D]. 北京:北京交通大學,2019.
[12] 汪沖,范百興,皮剛,等. 一種基于全站掃描的特征點自約束點云變形分析方法[J]. 測繪通報,2019(1):44-49.
[13] 李德仁,袁修孝. 誤差處理與可靠性理論[M]. 武漢:武漢大學出版社,2002.
[14] 隋立芬,宋力杰,柴洪洲. 誤差理論與測量平差基礎[M]. 北京:測繪出版社,2010.
[15] 朱曉康,鄒進貴. MS50全站掃描儀性能研究[J]. 測繪通報,2015(增1):114-118,128.
[16] SL 511-2011 水利水電工程機電設計技術規范[S].
[17] 楊靖波,李正,楊風利,等. 2008年電網冰災覆冰及倒塔特征分析[J]. 電網與水力發電進展,2008(4):4-8.
[18] 李勇杰,韓紀層,何成,等. 強風區750 kV超高壓輸電線路引流線斷股機理研究[J]. 武漢大學學報(工學版),2020,53(10):923-931.
(編輯:李 慧)
Deformation calculation of true pair points and optimization of points and surfaces based on total station scanner
WU Jinbo1, ZHANG Xiaochun1, YANG Dan2, ZHU Yuelin2, CHEN Juntao1, SU Kai1
(1. State Key Laboratory of Water Resources and Hydropower Engineering Science, Wuhan University, Wuhan 430072, China; 2. Jinshuitan Hydropower Plant, State Grid Zhejiang Electric Power Co., Ltd., Lishui 323000, China)
Abstract: The traditional deformation monitoring of equipment in hydropower plants uses point measurement, which cannot reflect the overall deformation characteristics. However, the total station scanner can quickly collect the target surface point cloud, and obtain the shape variable through point cloud processing. Based on the total station scanner, the deformation calculation method of the true paired point was proposed. According to the design plan of the rear intersection method, the two-phase point cloud data was collected, and then the deformation was calculated based on the true paired point and the error was reduced by the point and surface optimization algorithm, which has verified the accuracy of the deformation calculation method. Two simulation experiments were designed to verify the feasibility of the algorithm. The sag deformation of the transmission line and the bulging deformation of the case were simulated by adding a cone outside the box. The external force was applied to the test object to produce deformation, and the deformation was accurately measured as a reference value for deformation. The test results showed that the deformation calculation errors of the two simulation tests were 0.146 mm and 0.056 mm, respectively, and the accuracy can reach sub-millimeter level. Therefore, the deformation calculation method can be better applied to the field of facility equipment deformation monitoring.
Key words: deformation calculation; total station scanner; rear intersection method; isolated point cloud selection