大尹格莊金礦井下電機車無人駕駛系統(tǒng)開發(fā)與應(yīng)用
2022-02-20 11:29:19王啟健于濤
黃金 2022年1期
王啟健 于濤






摘要:大尹格莊金礦已進入深部開采階段,礦石提升、運輸問題突出。以大尹格莊金礦-290 m中段無人駕駛電機車為研究載體,從車載系統(tǒng)可靠性保障、電機車運行及安全監(jiān)測、自主裝卸及軌道終端保護3方面進行電機車無人駕駛關(guān)鍵技術(shù)研究,建成了功能完備的井下電機車無人駕駛系統(tǒng)。應(yīng)用該系統(tǒng)后,電機車運行狀態(tài)可遠程實時顯示,地表操作臺可進行遠程監(jiān)控,同時系統(tǒng)具備診斷功能,可進行應(yīng)急處理,使礦石運輸時間縮減21.95 %,運輸效率提高23.07 %,工作人員縮減75 %,具有借鑒推廣意義。
關(guān)鍵詞:無人駕駛技術(shù);精確定位;雷達預(yù)警;姿態(tài)監(jiān)測;自主裝卸;軌道終端保護技術(shù)
中圖分類號:TD67文獻標(biāo)志碼:A開放科學(xué)(資源服務(wù))標(biāo)識碼(OSID):
文章編號:1001-1277(2022)01-0064-05doi:10.11792/hj20220111
基金項目:山東省重點研發(fā)計劃項目(2016CYJS06A01)
引言
目前,國內(nèi)外井下無人駕駛電機車主要實現(xiàn)了自主運行、卸載及遠程遙控放礦功能。2011年,中國恩菲工程技術(shù)有限公司與銅陵有色金屬集團股份有限公司冬瓜山銅礦聯(lián)合取得了無人駕駛技術(shù)的首次突破[1];2018年6月,金川集團有限公司龍首礦自主研發(fā)的無人駕駛電機車運行系統(tǒng)成功投入運行;2018年8月,安徽馬鋼張莊礦業(yè)有限責(zé)任公司無人駕駛電機車成功運行。電機車無人駕駛系統(tǒng)研發(fā)與使用在國內(nèi)蓬勃發(fā)展,但運行系統(tǒng)中自動裝礦功能、運行預(yù)碰撞檢測仍是國內(nèi)外攻關(guān)的艱難課題。雖然理論上自動裝礦控制技術(shù)已經(jīng)不是難題,但在實際應(yīng)用上因現(xiàn)場生產(chǎn)工藝、現(xiàn)場環(huán)境和安全保障要求的限制還存在很大難度,尤其是檢測反饋方面。同時,還需要長時間采集實際生產(chǎn)中的各項檢測數(shù)據(jù)、放礦控制執(zhí)行數(shù)據(jù)和機車運行情況,建立相關(guān)數(shù)學(xué)模型優(yōu)化算法,將模型化的數(shù)據(jù)應(yīng)用到放礦控制、機車控制中,最終實現(xiàn)自動放礦[2-5]。
招金礦業(yè)股份有限公司大尹格莊金礦(下稱“大尹格莊金礦”)已經(jīng)進入深部開采,提升、運輸一直是制約開采的重要因素,現(xiàn)有運輸手段占用人力較多,維修復(fù)雜,運輸效率不高,長時間井下作業(yè)對人員安全健康造成威脅,導(dǎo)致井下作業(yè)人員招聘越來越難。在企業(yè)發(fā)展與國內(nèi)智能化發(fā)展的大環(huán)境下,大尹格莊金礦積極主動建設(shè)智慧礦山,提高企業(yè)科技水平。
1工程背景
大尹格莊金礦床位于招(遠)—平(度)斷裂帶中段,屬大、深、貧型金礦床。礦山主要從事金礦石采選作業(yè),最終產(chǎn)品為金精礦。井下采用豎井和斜坡道聯(lián)合開拓方式,主要運輸巷道位于-290 m、-496 m、-616 m、-676 m中段,主要采用皮帶運輸、有軌電機車運輸方式。現(xiàn)有井下有軌電機車運輸采用ZK10-7/250架線式電機車雙機牽引,搭載8輛4 m底卸式或側(cè)卸式礦車,礦車質(zhì)量3.3 t,有效載質(zhì)量為6.26 t。巷道鋪設(shè)軌距762 mm、質(zhì)量24 kg的窄軌。每臺電機車配備司機1名,每列電機車配備放礦工、清潔工各1名,整列運輸電機車共需配備4名人員,相互配合完成裝礦、運輸、卸礦過程。
根據(jù)大尹格莊金礦現(xiàn)有生產(chǎn)狀況,經(jīng)現(xiàn)場技術(shù)驗證,選定-290 m中段作為電機車無人駕駛系統(tǒng)研究中段。-290 m中段巷道規(guī)格為寬3.2 m、高3 m,運行巷道長775 m,改造的自動放礦漏斗為運輸巷最南端6801號放礦漏斗。井下電機車無人駕駛系統(tǒng)從2017年上半年開始進行建設(shè),系統(tǒng)建設(shè)包含網(wǎng)絡(luò)通訊試驗測試研究、電機車廠區(qū)機車試驗測試研究、巷道基礎(chǔ)設(shè)施改造安裝和巷道內(nèi)電機車調(diào)試及運行等階段。最終目標(biāo)為在地表調(diào)度中心操作臺完成對井下電機車的遠程遙控操作,實現(xiàn)裝礦、運輸、卸礦過程全流程自動化,并形成運輸報表。
2井下電機車無人駕駛系統(tǒng)
電機車無人駕駛技術(shù)是一項集采礦技術(shù)、機械技術(shù)、控制技術(shù)、通訊技術(shù)、計算機技術(shù)等為一體的,涉及多學(xué)科領(lǐng)域的綜合性技術(shù)。為實現(xiàn)電機車從有人駕駛到無人駕駛,有許多關(guān)鍵技術(shù)需要逐一突破,這些關(guān)鍵技術(shù)是井下電機車無人駕駛系統(tǒng)功能實現(xiàn)的核心。
2.1無人駕駛系統(tǒng)可靠性保障技術(shù)
2.1.1電機車變頻器技術(shù)
電機車變頻器技術(shù)是電機車無人駕駛系統(tǒng)的基礎(chǔ),是電機車正常運行的動力系統(tǒng),通過變頻器技術(shù)可以靈活地控制電機車平穩(wěn)運行,并實時監(jiān)控電機車動力系統(tǒng)的電壓、電流、速度等重要參數(shù)。
2022年第1期/第43卷機電與自動控制機電與自動控制黃金1)變頻器控制。大尹格莊金礦電機車動力系統(tǒng)采用三相220 V、30 kW交流變頻電動機。根據(jù)對變頻器的控制要求,分為手動模式和遠程模式,在手動模式下可以通過系統(tǒng)控制按鈕及操作手柄對變頻器發(fā)出啟動及停止指令或給定頻率;在遠程模式下,通過profinet通信對變頻器實施控制。根據(jù)控制要求及變頻器的功能,對變頻器參數(shù)進行設(shè)置,重點注意對變頻器與控制系統(tǒng)通訊設(shè)置聯(lián)通、變頻器給定頻率運行穩(wěn)定性和能耗制動電阻發(fā)熱的控制。
2)電機車變頻器驅(qū)動能力開發(fā)。根據(jù)電機車設(shè)計規(guī)范,需要對電機車輸出力矩進行測試。根據(jù)設(shè)計要求,電機車正常輸出拉力為15 kN,最大拉力為18 kN。本次試驗在電機車尾端增加拉力測試裝置,并且固定,調(diào)整變頻器參數(shù),增加電機車加頻時間,使電機車的電動機在堵轉(zhuǎn)狀態(tài)下進行測試。經(jīng)過3次拉力測試:正常輸出拉力均大于15 kN,基本穩(wěn)定在18 kN,最大拉力達到25 kN,測試結(jié)果滿足電機車出廠拉力要求。
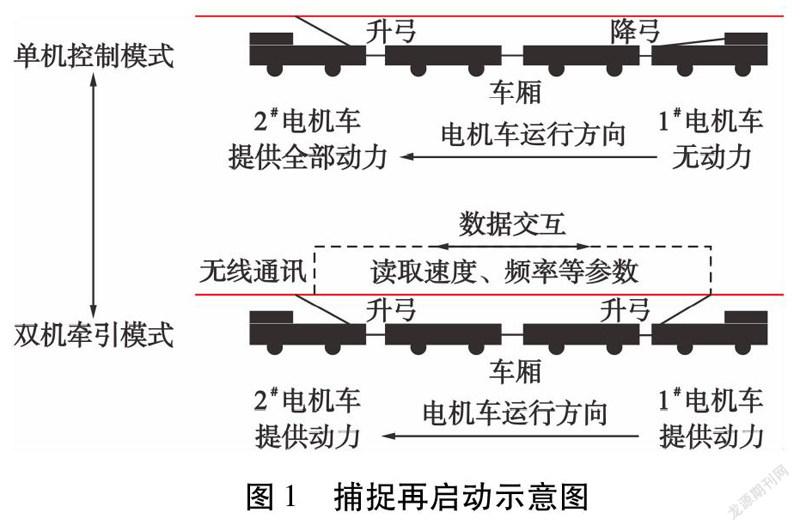
3)捕捉再啟動研究。捕捉再啟動技術(shù)即變頻器快速地改變輸出頻率捕捉正在自由旋轉(zhuǎn)的電動機實際速度,一旦捕捉到電動機的速度實際值,使電動機按常規(guī)斜坡函數(shù)曲線加速運行到頻率的設(shè)定值。雙機牽引模式(兩臺電機車同時提供動力)切換電機車單機控制模式(單臺電機車提供動力)時,無動力電機車瞬間跟隨有動力電機車,無動力電機車通過旋轉(zhuǎn)編碼器捕捉到運行速度,通過速度與頻率關(guān)系運算得出頻率,將其頻率給定無動力電機車,此時兩臺電機車動力恒定,不會出現(xiàn)電機車動力不匹配的現(xiàn)象,該技術(shù)為電機車運行期間經(jīng)過放礦漏斗時單機控制模式和雙機牽引模式互換提供了技術(shù)支撐。捕捉再啟動示意圖如圖1所示。
2.1.2電機車制動技術(shù)
電機車制動技術(shù)是整個電機車運行期間電機車速度把控及安全停車的關(guān)鍵。電機車制動技術(shù)主要由車載壓力系統(tǒng)和電機車制動系統(tǒng)組成,車載壓力系統(tǒng)為整個電機車制動系統(tǒng)提供制動能力,電機車制動系統(tǒng)主要通過機械結(jié)構(gòu)對電機車車輪進行可靠制動。車載壓力系統(tǒng)由直流空壓機及0.5 m氣缸組成,為整個電機車系統(tǒng)提供穩(wěn)定氣源。電機車剎車系統(tǒng)主要由電磁閥、氣缸、過濾器、減壓閥等設(shè)備組成,分為手動控制和電動控制,當(dāng)電動控制出現(xiàn)問題時,可以將轉(zhuǎn)換開關(guān)換到手動控制位置,并通過駕駛室內(nèi)的按鈕控制電機車的行車、駐車。
2.1.3全流程自主運行與控制技術(shù)
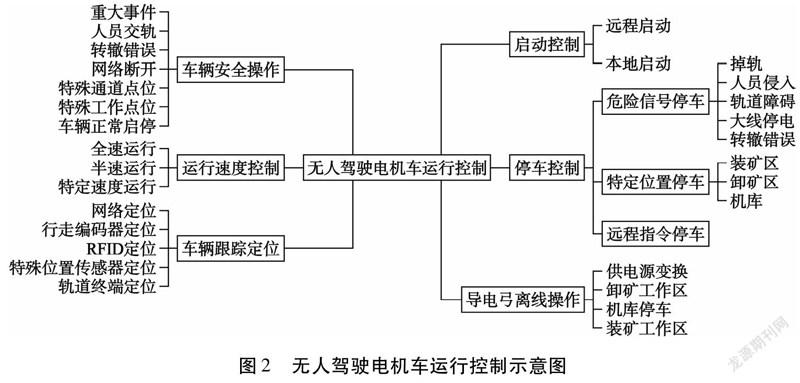
電機車無人監(jiān)督全流程自主運行與控制需分解為各個功能模塊以實現(xiàn)各個功能,整個運行控制由啟動控制、停車控制、導(dǎo)電弓離線操作、車輛安全操作、運行速度控制及車輛跟蹤定位組成。無人駕駛電機車運行控制示意圖如圖2所示。
2.2電機車運行及安全監(jiān)測技術(shù)
2.2.1精準(zhǔn)定位技術(shù)
針對電機車位置定位不準(zhǔn)的突出問題,在技術(shù)研發(fā)過程中,嘗試了多種解決方案,綜合電機車的位置檢測單元、速度檢測單元、調(diào)速單元、位置校正單元、信號處理單元和信號執(zhí)行單元的數(shù)據(jù)建立電機車位置測算模型,通過對位置測算模型的分析計算,實現(xiàn)對電機車運行時的精確定位。
2.2.2視頻圖像分析技術(shù)
通過高清攝像機將礦車料位圖像實時反饋至工控機控制系統(tǒng),運用計算機視覺分析技術(shù)對攝像機捕獲的圖像進行分析,判斷大塊礦料并及時報警,防止出現(xiàn)事故。同時,工控機對數(shù)據(jù)進行處理,計算出礦車料位、礦料流量,并通過PLC控制器實現(xiàn)自動放礦控制,視頻圖像分析技術(shù)原理如圖3所示。
2.2.3自主導(dǎo)向技術(shù)
依托遠程控制分站,開發(fā)軌道自主導(dǎo)向技術(shù),用以應(yīng)對縱橫交錯的軌道路段。在機車行駛過程中,若需要切換行車路線,車載控制終端提前反饋信號至主控制中心,主控制中心接收反饋信號后根據(jù)電機車當(dāng)前作業(yè)任務(wù)進行邏輯判斷,隨后選中行車路線的同時向道岔切換執(zhí)行機構(gòu)下發(fā)切換命令,路線自動切換,從而完成電機車運行過程中的軌道自主導(dǎo)向。
2.2.4區(qū)間定速技術(shù)
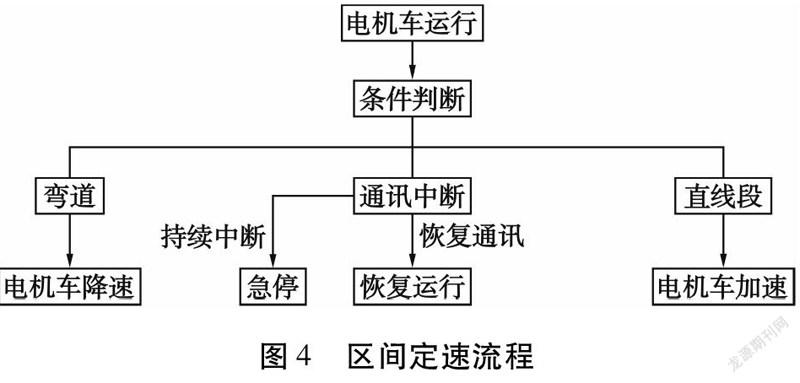
巷道路線復(fù)雜,彎曲不定,因此在下位機程序中對巷道進行區(qū)域劃分,根據(jù)巷道激光傳感器、電子信標(biāo)、中控室控制器結(jié)合光電開關(guān)反饋信號及AP狀態(tài)等確認電機車位置。電機車區(qū)間定速控制系統(tǒng)在不同區(qū)間預(yù)設(shè)不同電機車行駛速度,當(dāng)電機車進入對應(yīng)區(qū)域后,平臺設(shè)置電機車自動按照設(shè)定速度行進。當(dāng)電機車駛?cè)霃澋绤^(qū)域時,系統(tǒng)檢測到電機車行車位置與當(dāng)前行車速度,下發(fā)電機車降速命令,使電機車平穩(wěn)駛過彎道;通過彎道后再次依據(jù)電子信標(biāo)判斷直線區(qū)域,電機車自動加速。當(dāng)通訊延時過長時,電機車車載控制器自動檢測到延時情況,發(fā)出警示并逐漸減速;通訊延時正常后,電機車自動逐漸加速。區(qū)間定速流程如圖4所示。
2.2.5雷達預(yù)警技術(shù)
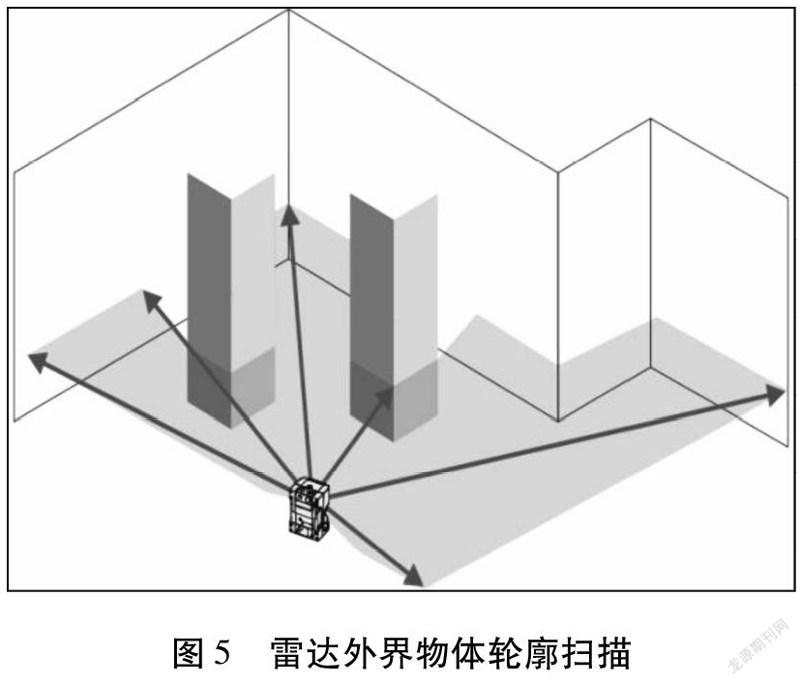
目前國內(nèi)雷達檢測應(yīng)用廣泛,大到軍事裝備領(lǐng)域,小到民用汽車、輪船、飛機等均有涉及,通過雷達回波定位感知功能實現(xiàn)對目標(biāo)位置與方向的實時監(jiān)測及預(yù)警。雷達預(yù)警技術(shù)主要用于電機車行駛過程中前方遭遇障礙物時的應(yīng)急處理。
雷達的掃描范圍為190°扇形區(qū)域,通過回波反射將外界輪廓展現(xiàn)在軟件平臺上,可根據(jù)雷達掃描范圍定義監(jiān)測角度與預(yù)警區(qū)域。雷達外界物體輪廓掃描如圖5所示。
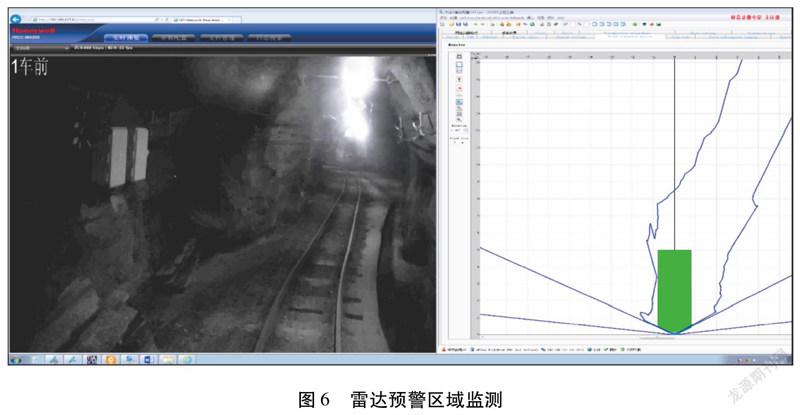
根據(jù)現(xiàn)場實際情況,將雷達掃描區(qū)域分成A、B、C、D 4個報警區(qū)域,A區(qū)域掃描半徑為40 m,B區(qū)域掃描半徑為20 m,C區(qū)域掃描半徑為10 m,D區(qū)域掃描半徑為5 m,各個區(qū)域的掃描寬度為1.5 m。根據(jù)現(xiàn)場實際情況,可對各個掃描區(qū)域的半徑和寬度進行適當(dāng)調(diào)整,也可以設(shè)定成不規(guī)則掃描區(qū)域。雷達預(yù)警區(qū)域監(jiān)測如圖6所示。
當(dāng)雷達捕捉到電機車前方軌道上的障礙物時,根據(jù)障礙物所在區(qū)域的不同,發(fā)出不同報警信號。控制系統(tǒng)接收到報警信號后,執(zhí)行鳴笛指令、減速指令、急停指令。
2.2.6姿態(tài)監(jiān)測技術(shù)
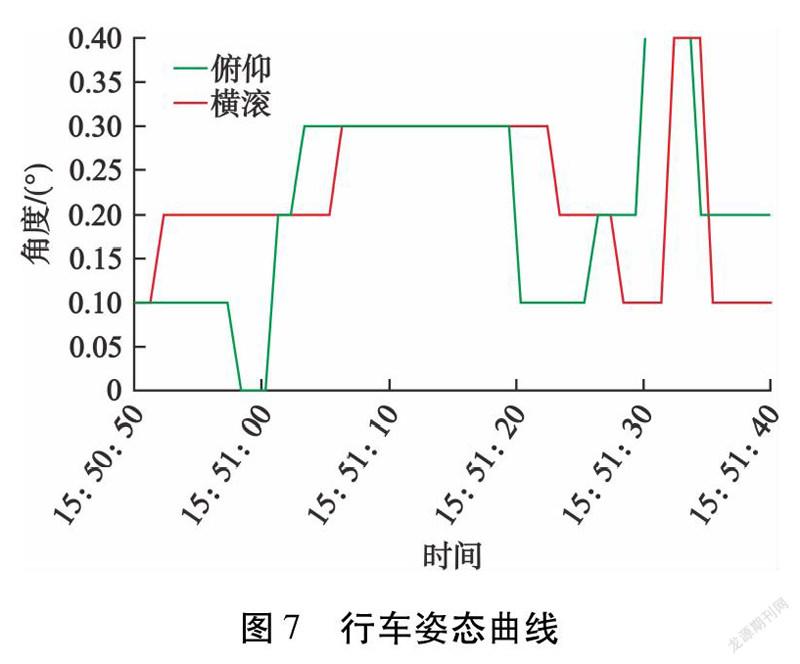
姿態(tài)監(jiān)測技術(shù)主要應(yīng)用當(dāng)前航海航空領(lǐng)域廣泛采用的陀螺儀測量原理,實現(xiàn)對監(jiān)測目標(biāo)的姿態(tài)監(jiān)測。結(jié)合該測量原理,將測量方法進行整合修改,應(yīng)用到井下電機車無人駕駛系統(tǒng)行車姿態(tài)動態(tài)分析中。為更加直觀監(jiān)測電機車行車姿態(tài),通過布置車載行車角度傳感器,測量機車運行過程中車體俯仰與橫滾角度,判斷機車是否發(fā)生脫軌等異常情況。通過算法保證測量精度,同時運用非線性補償與漂移補償?shù)妊a償手段,消除因異常干擾產(chǎn)生的數(shù)據(jù)誤差,實現(xiàn)動態(tài)傾角檢測。傳感器將數(shù)據(jù)傳送至下位機主控制系統(tǒng),并通過人機交互界面顯示機車實時運行姿態(tài),形成機車姿態(tài)變化曲線。行車姿態(tài)曲線如圖7所示。
2.2.7電機車安全運行保障措施
電機車安全運行是安全生產(chǎn)的重要環(huán)節(jié)。運行過程中對電機車進行多維度的實時監(jiān)測,對監(jiān)測數(shù)據(jù)異常報警信號進行智能判斷,并采取相應(yīng)的保障措施。多維度的電機車安全運行保障措施示意圖如圖8所示。
2.3自主裝卸及軌道終端保護技術(shù)
2.3.1自主裝卸與動力自適應(yīng)技術(shù)
井下電機車礦石運輸作業(yè)各個階段中,礦石裝卸至關(guān)重要,傳統(tǒng)的人工操作電機車在進行裝卸過程中常常存在安全隱患,因此研究并開發(fā)了無人駕駛電機車自主裝卸技術(shù)。其主要通過RFID電子標(biāo)簽結(jié)合電機車信號讀取裝置確認電機車行車位置,并進行邏輯判斷。
當(dāng)電機車帶動礦車進入裝載區(qū)域,放礦口液壓擋板自動打開,振打電動機開啟,礦料從放礦口流暢下料。當(dāng)?shù)V車全部裝滿后,振打電動機自動關(guān)閉,確保礦料不再下料,液壓擋板自動關(guān)閉,之后電機車駛出裝礦區(qū)域。自主放礦流程如圖9所示。當(dāng)電機車駛?cè)胄遁d區(qū)域時,電機車車體RFID讀卡器通過讀取布置在卸載區(qū)域的電子標(biāo)簽來確認電機車位置,并將信號反饋至主控制中心,主控制中心根據(jù)信號反饋判斷電機車是否可以進行卸載。
1#、2#電機車駛?cè)胄兜V區(qū)域后,由于卸載站布置的特殊性,1#電機車車體處于懸空狀態(tài),此時1#電機車與懸掛車廂全部由尾部2#電機車提供動力推動,此時就需要通過改變2#電機車行車速度來改變扭矩,加大電機車推動力。當(dāng)1#電機車駛出卸載區(qū)域接觸軌道時,2輛電機車均有動力,需要再次均衡前后電機車的速度與扭矩,實現(xiàn)整個卸載過程的動力自適應(yīng),保證電機車在卸載過程中平穩(wěn)地改變行車速度與動力。動力自適應(yīng)示意圖如圖10所示。
2.3.2軌道終端極限保護技術(shù)
電機車在卸載完成后,為加強系統(tǒng)的安全性與可靠性,考慮到卸載過程可能出現(xiàn)的異常情況(如電機車卸載完成后因異常情況導(dǎo)致電機車不剎車駛出軌道造成脫軌),開發(fā)了軌道終端極限保護技術(shù)。通過安裝在巷道側(cè)壁的激光傳感器結(jié)合電機車車頭的激光接收端,當(dāng)電機車出現(xiàn)異常時,激光傳感器接收反饋信號,并將信號直接反饋至主控制中心進行邏輯處理。激光傳感器反饋信號說明電機車已經(jīng)出現(xiàn)異常情況,沒有在正確位置剎車停車,控制系統(tǒng)將通過邏輯判斷后直接下發(fā)電機車急停命令,同時人機交互界面出現(xiàn)報警窗口,提示操作人員檢查并排除故障。
3工程應(yīng)用
井下電機車無人駕駛系統(tǒng)在大尹格莊金礦-290 m運輸中段運行以來,取得了良好的應(yīng)用效果,主要體現(xiàn)在提高運輸效率與運輸能力、減少井下操作人員數(shù)量等方面。電機車的運行狀態(tài)在控制室實時顯示,通過視頻監(jiān)控在控制室可以實現(xiàn)裝礦、卸礦過程無人操作,整個運輸過程均由控制室內(nèi)工作人員通過控制系統(tǒng)遙控完成,在控制室可以完全掌握運輸系統(tǒng)的生產(chǎn)情況和電機車精確定位,可以對電機車進行實時調(diào)度和控制。-290 m中段井下電機車無人駕駛系統(tǒng)操作界面如圖11所示。
大尹格莊金礦應(yīng)用電機車無人駕駛技術(shù)后,取得了較好的技術(shù)指標(biāo),項目實施前后技術(shù)指標(biāo)對比如表1所示。單次運輸時間由原來的41 min縮短到32 min,節(jié)省運輸時間21.95 %;運輸能力由原來的1 300 t/d提高到1 600 t/d,運輸能力提高了23.07 %;每班次所需崗位操作人員從原來的4人減少到1人,人員數(shù)量縮減了75 %。
4結(jié)語
通過對無人駕駛電機車變頻技術(shù)、制動技術(shù)、全流程自主運行與控制技術(shù)、精準(zhǔn)定位技術(shù)、視頻圖像分析技術(shù)、自主導(dǎo)向技術(shù)、區(qū)間定速技術(shù)、雷達預(yù)警技術(shù)、姿態(tài)監(jiān)測技術(shù)、機車安全運行保障措施、自主裝卸與動力自適應(yīng)技術(shù)、軌道終端極限保護技術(shù)的研究,建成了大尹格莊金礦-290 m中段井下電機車無人駕駛系統(tǒng),實現(xiàn)了地表和井下操控室遙控操作,提高了無人化有軌運輸系統(tǒng)運行的安全性及可靠性,運輸效率顯著提升,為后續(xù)無人駕駛電機車在深部運輸中段的推廣應(yīng)用奠定了基礎(chǔ)。同時還需對相關(guān)技術(shù)進一步進行融合,簡化硬件系統(tǒng),提高無人駕駛系統(tǒng)在深部井下的適用性。
[參 考 文 獻]
[1]冬瓜山無人駕駛電機車應(yīng)用取得進展[J].有色設(shè)備,2016(2):51.
[2]張毅力,汪令輝,黃壽元.地下礦無人駕駛電機車運輸關(guān)鍵技術(shù)方案研究[J].金屬礦山,2013(5):117-120.
[3]隋淼.地下礦無人駕駛電機車運輸關(guān)鍵技術(shù)探究[J].中國設(shè)備工程,2017(8):104-105.
[4]楊臣.金屬礦山中無人駕駛礦車控制系統(tǒng)的研究[D].昆明:昆明理工大學(xué),2012.
[5]吳和平,吳玲,張毅,等.井下無人采礦技術(shù)裝備導(dǎo)航與控制關(guān)鍵技術(shù)[J].有色金屬(礦山部分),2007,59(6):12-16,44.
作者簡介:王啟健(1971—),男,山東招遠人,高級工程師,從事采礦工程及智能礦山研究工作;山東省招遠市齊山鎮(zhèn)大尹格莊村,招金礦業(yè)股份有限公司大尹格莊金礦,265414;E-mail:807578116@qq.com
王啟健,于濤(招金礦業(yè)股份有限公司大尹格莊金礦)
Development and application of underground driverless system
of electric motors in Dayingezhuang Gold MineWang Qijian,Yu Tao
(Dayingezhuang Gold Mine,Zhaojin Mining Industry Co.,Ltd.)
Abstract:Since Dayingezhuang Gold Mine entered deep mining phase,the ore hoisting and conveying challenges have become prominent.The study takes the driverless electric motors at the -290 m level in Dayingezhuang Gold Mine as the research subject,and carries out critical driverless technology research on the electric motors from 3 aspects:reliability insurance of vehicle-mounted system,operation and security monitoring of electric motors,self-loading and unloading and track terminal protection,and successfully establishes fully functional underground electric motor driverless system.The electric motor status can be displayed remotely and in real time,the surface console can remotely monitor,and at the same time the system can diagnose and handle emergencies,reducing ore conveying time by 21.95 %,improv-ing conveying efficiency by 23.07 %,lowering staff number by 75 %.The study has promotion significance.
Keywords:driverless technology;precise location;radar warning;posture monitoring;self-loading and unloading;track terminal protection technology