涵道式垂直起降固定翼無人機過渡走廊研究
2022-02-22 08:57:00王春陽周洲
航空工程進展 2022年1期
關鍵詞:系統
王春陽,周洲
(西北工業大學航空學院,西安 710072)
0 引 言
垂直起降固定翼無人機能夠實現零速度起飛著陸,不需要開辟專門的起降跑道,具有懸停能力,能夠保持常規固定翼飛行器的速度快、航程長等優點,自身反扭矩相互抵消,機動靈活,是一些特殊環境下執行偵察、監測任務的最佳選擇之一。無人機所用涵道在相同的葉片尺寸下比螺旋槳產生更大的推力,這也確保了其設計緊湊、低噪聲和高氣動效率的特點。這些特性使得各國機構在涵道式無人機領域進行了相關研究。
常規固定翼無人機要實現垂直起降,需要額外的增加動力部件,在眾多的垂直起降固定翼飛行器中,尾座式、傾轉旋翼式和固旋翼式是最為常見的設計。涵道式垂直起降固定翼無人機,其動力系統分兩部分,一是前升力風扇系統,二是由后涵道、舵面組成的動力增升系統。此類飛行器能夠從垂直起降過渡到水平飛行,中間的過渡走廊是飛行過程的重點。針對垂直起降固定翼飛行器的過渡飛行走廊研究,主要集中在復合直升機和傾轉旋翼類飛行器。朱漢等、段賽玉等對復合式直升機的安全過渡走廊進行了研究,并給出了過渡走廊的計算方法;吳偉偉等針對傾轉旋翼機過渡過程中構型不斷變化,氣動特性具有強非線性的特點,建立了一套適合于過渡狀態的網格系統,得出了過渡狀態的氣動特性;NASA 以XV-15和V-22 為樣機對傾轉旋翼飛行器進行了研究,給出了過渡過程中的飛行操縱策略;J. Magee等、L. R. Wallace 等、S. W. Choi 等以 縮 比樣機為研究對象,研究了短艙傾角與飛行速度包線,并與實驗測試結果進行了比較,完成了從直升機模式到固定翼模式的過渡飛行;曹蕓蕓等針對傾轉旋翼飛行器過渡飛行過程中的變構型變速度的特點,提出了一種此類飛行器從垂直起降到水平飛行的過渡飛行的動力系統傾角—速度包線分析方法,確定了機翼失速限制的發動機短艙傾角—速度包線;萬華芳、陳永等針對傾轉旋翼飛行器在飛行配平過程中姿態角的取值范圍,以XV-15 飛行器為案例,計算確定了其過渡走廊,并且設計了過渡走廊曲線。
以上研究多針對傾轉旋翼類飛行器和純涵道類飛行器的過渡飛行走廊,而涵道和升力風扇為動力的垂直起降固定翼類無人機的過渡走廊尚未有太多研究,王紅波等對預埋式升力風扇對全機的氣動影響進行了研究,提出了一種耦合動力的雙層翼布局垂直起降固定翼無人機,并驗證此布局利用滑流增升的思路是可行的。
本文以涵道式垂直起降固定翼無人機為研究對象,基于無人機的動力和氣動力平衡匹配,從飛行力學角度出發,建立垂直起降固定翼無人機的過渡飛行走廊模型,采用案例無人機對過渡走廊進行計算,并提出兩種擴大過渡走廊的方法。
1 過渡走廊模型
垂直起降固定翼無人機的過渡飛行走廊與固定翼飛行器的飛行包線概念相似,本文研究的飛行過渡走廊模型即為此類無人機的動力增升系統偏角—速度包線模型。該模型分別從低速和高速兩個方面進行分析,低速段即為飛行過渡走廊的左邊界,由最大升力系數來確定;高速段為飛行過渡走廊右邊界,由可用功率來確定。
在垂直起降模式下,垂直起降固定翼無人機動力配置和直升機有較大差別,主要由前升力風扇和后動力增升系統組成,如圖1 所示。固定翼飛行模式下,前升力風扇關閉,動力增升系統轉平,動力增升涵道為推進動力,機翼為升力面。過渡飛行過程中,動力增升系統不斷偏轉,升力風扇動力不斷變化,在此過程中由動力增升系統、前升力風扇和機翼氣動力三者來平衡無人機的重力,前進動力則主要由動力增升系統偏轉產生的前向動力分量提供。當無人機處于低速飛行時,對動力增升系統進行較快的偏轉可能會導致機翼失速,從而不能完成過渡飛行;當無人機飛行速度過高時,動力增升系統的偏轉可能會導致可用功率和動力穩定性不足等問題。

圖1 涵道式垂直起降固定翼無人機示意圖Fig.1 Diagram of ducted vertical take-off and landing fixed-wing UAV
1.1 過渡窗口
飛行過渡窗口是指完成某種飛行任務所需要的外界條件和飛行器自身條件的參數合集。本文的過渡飛行窗口可以分為過渡前端窗口和過渡末端窗口,前端窗口和末端窗口之間的合力參數匹配即可組成過渡飛行走廊。過渡前端窗口是垂直起飛后懸停在某一安全高度的飛行狀態;過渡末端窗口是滿足安全平飛速度的飛行狀態。過渡前端窗口通常滿足一定的安全高度即可,過渡末端窗口通常有三個重要飛行參數,一是飛行速度,二是動力推力,三是無人機姿態,可以通過式(1)~式(3)計算得出。
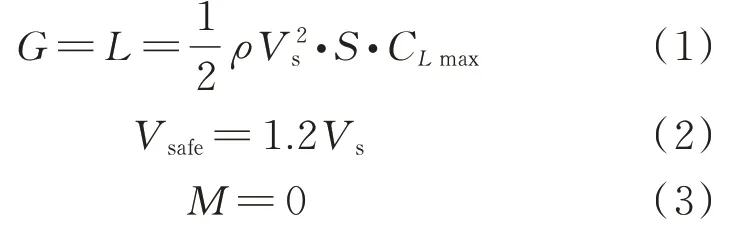
式中:為無人機質量;為氣動升力;為空氣密度;為 無人機失速速度;為機翼 面積;C為無人機最大升力系數;為末端窗口的安全飛行速度;為全機力矩,其平衡方程如式(4)所示。

式中:為升力風扇推力;為增升涵道推力;為飛機俯仰角;為涵道合力偏角;為升力風扇力臂;為動力增升系統力臂。
1.2 基于最大升力系數的動力增升系統偏角—速度包線模型
低速段的動力增升系統偏角—速度包線從垂直起降飛行模式的懸停狀態開始,直到動力增升系統偏轉到固定翼飛行模式下無人機不發生失速的最小速度。懸停時動力增升系統氣動力和前升力風扇氣動力平衡無人機重力,在一般情況下,無人機姿態角為零,此時的升力風扇拉力和動力增升系統氣動力豎直向上,由于增升翼面的存在,增升涵道的偏角一般小于90°。動力增升系統氣動力偏角與增升涵道偏角和增升翼面相對偏角相關,可表示為

式中:為動力增升系統合力偏角;為增升涵道相對于機體偏角;為增升翼面相對于增升涵道偏角。
以懸停狀態為過渡前端窗口開始轉入過渡飛行模式,但在過渡飛行初期,速度積累不夠,飛行速度較低,動力增升系統偏轉過程中除了滿足無人機的升力和拉力與重力和阻力平衡之外,還要保證動力增升系統不同偏轉角下的機翼不失速。
過渡飛行過程中,無人機的受力情況如圖2 所示,其中為機身迎角;和分別為機翼氣動升力和阻力,分別包含了主翼自由來流部分氣動力和主翼誘導部分氣動力。

圖2 過渡過程受力示意圖Fig.2 Force diagram of transition process
根據無人機受力可分析其平衡關系如下:

式(6)中升力和阻力可表示為
式中:和分別為增升涵道在主翼上的誘導升力和誘導阻力。
垂直起降固定翼無人機在過渡飛行過程中,無人機的重力主要由升力風扇和動力增升系統來平衡,進而過渡到機翼氣動力平衡。過渡前期飛行速度較低,機翼所能提供的升力限制于臨界失速迎角,因此在計算過渡低速段包線時機翼升力所對應的最大迎角取臨界迎角,過渡飛行包線低速段的最大迎角滿足關系:

式中:為機翼臨界迎角;為機翼安裝角。
1.3 基于可用功率的動力增升系統偏角—速度包線模型
平衡狀態的包線給出了以機翼不失速為前提的動力增升系統偏角—速度包線,但是在實際飛行過程中,只要動力足夠,即便是機翼失速,都能較好地完成過渡飛行。假設無人機的結構性能足夠好,不考慮結構問題所產生的顫振邊界,將無人機系統可用功率作為約束來確定過渡過程的動力增升系統偏角—速度包線。
動力增升系統在偏轉過程中必須滿足升力風扇和動力增升系統氣動力、機身氣動力與無人機重力相平衡,就必須要求升力風扇和動力增升系統的可用功率在過渡飛行過程中滿足飛行要求。
升力風扇和動力增升涵道的需用功率組成一致,都是由其誘導功率、型阻功率、廢阻功率和爬升功率四部分組成,即有:

式中:為從發動機到葉片的傳動損失系數。
根據能量守恒和動量定理,廢阻功率、誘導功率和爬升功率可以表示為

式中:為葉片平面的垂直速度;為旋翼葉片的誘導速度。
考慮到升力風扇和增升涵道存在多槳葉片,誘導速度非均勻,本文對誘導速度加以修正,則式(10)表示為

根據葉素理論,旋翼類型阻功率表示為

=π C/8,為 旋 翼 實 度,C為 葉片阻力系數,為旋翼槳尖速度,為前進比。對于升力風扇和增升涵道類動力部件,其功率可以用式(10)~式(12)求得。
在功率限制的情況下,垂直起降固定翼無人機的動力增升系統偏角—速度包線邊界在滿足力平衡關系的同時,升力風扇和增升涵道總功率必須小于動力系統的額定功率,即<。
1.4 過渡走廊計算流程
過渡走廊即為過渡飛行包線,式(6)為計算垂直起降固定翼無人機過渡走廊的平衡方程,其與式(1)聯立可求解三個未知量,包括升力風扇拉力、動力增升系統拉力、動力增升系統拉力偏角。在計算基于失速速度的動力增升系統偏角—速度包線時,以升力風扇拉力、動力增升系統拉力和動力增升系統拉力偏角為求解量;在計算基于功率的動力增升系統偏角—速度包線時,以升力風扇和增升涵道功率為限制,以無人機姿態為求解量。
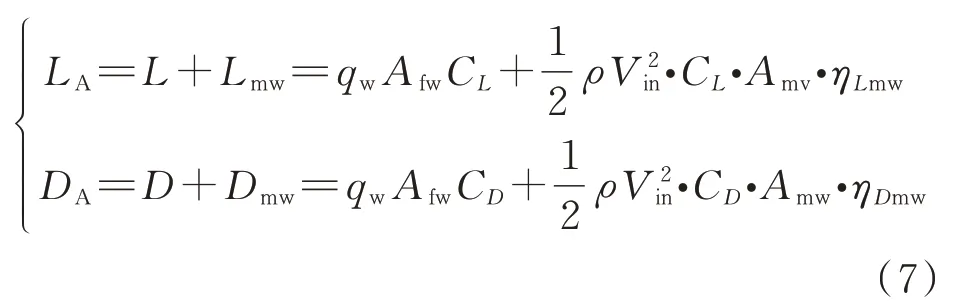
過渡走廊計算流程如圖3 所示。首先由懸停狀態公式(4)確定過渡飛行包線前端窗口的動力參數。根據機翼不失速條件公式(1)確定無人機此時狀態的氣動力系數,在不同的飛行速度下將C、C代入公式(7)求解出無人機機身氣動力,最終代入平衡公式(6),以升力風扇拉力、動力增升系統拉力和動力增升系統拉力偏角為求解量,進行配平計算,可求得基于失速速度的動力增升系統偏角—速度包線。計算基于功率的動力增升系統偏角—速度包線時,首先設定動力增升系統偏角,對平衡方程進行計算,然后根據功率公式求出部件需用功率隨前飛速度的變化值,最后根據動力部件輸出功率限制條件得到垂直起降固定翼無人機基于功率的過渡飛行包線。
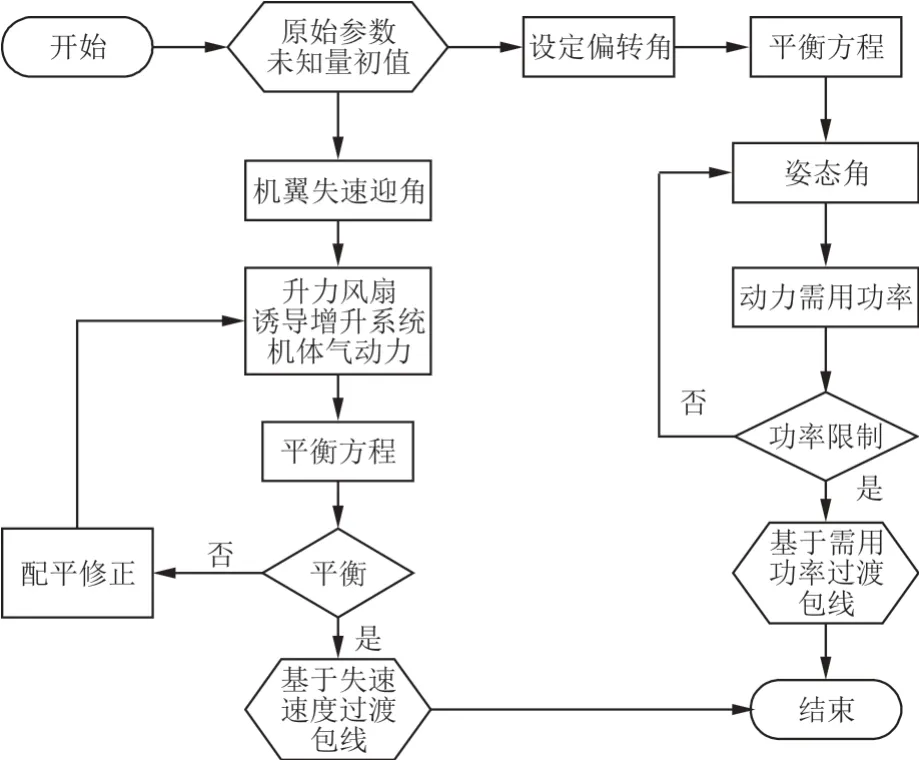
圖3 過渡走廊計算流程Fig.3 Calculation process of transition corridor
2 算例與分析
以某型垂直起降固定翼無人機為案例樣機,計算其過渡飛行過程中的動力增升系統偏角—速度包線。樣機采用前升力風扇、后動力增升系統的布局,過渡飛行過程中的樣機升力系數和阻力系數隨迎角的變化關系如圖4 所示,圖例中“12-A0-5”表示動力增升系統單涵道動力12 N,迎角為0°,自由來流為5 m/s,圖例中“12-F10-5”表示動力增升系統單涵道動力12 N,涵道后舵面偏轉10°,自由來流為5 m/s,此氣動力系數曲線計算了過渡過程中特殊狀態點的氣動數據。
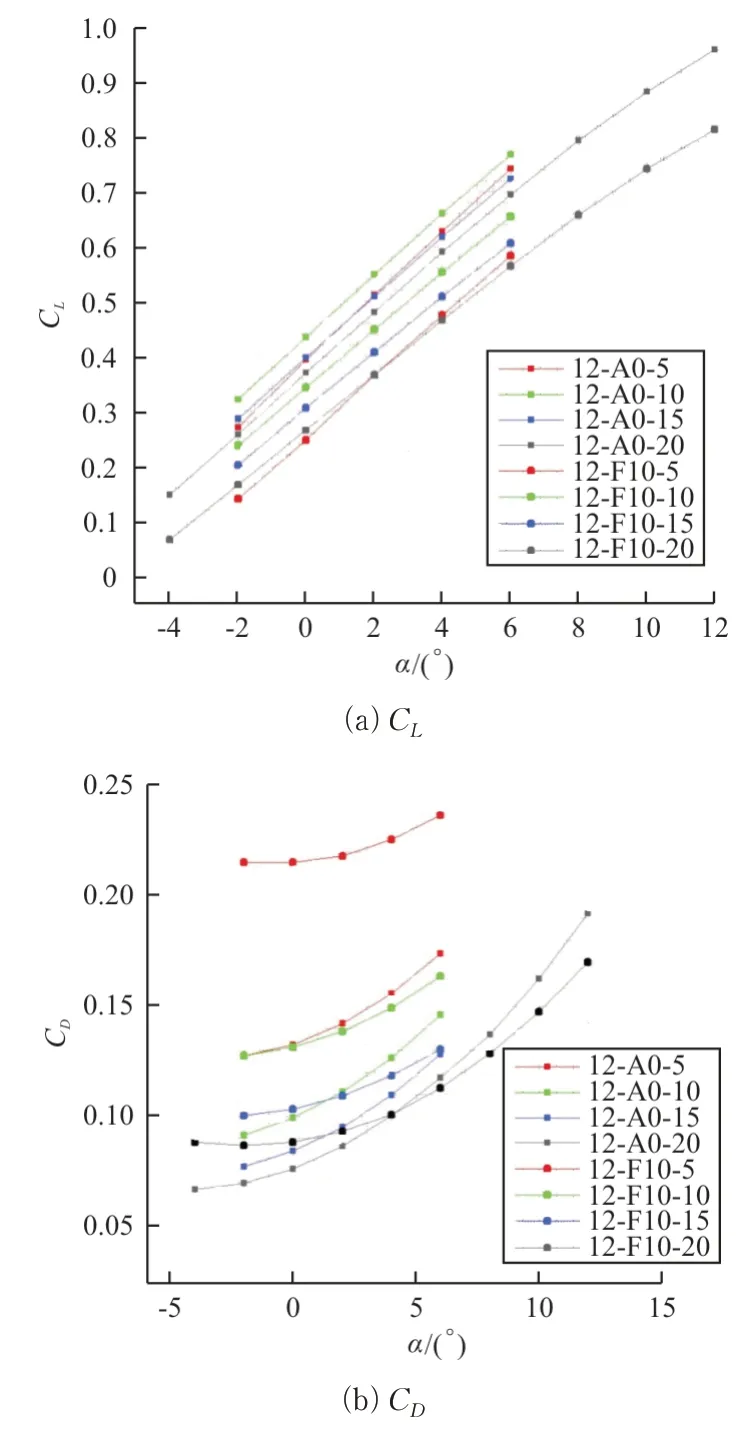
圖4 案例無人機過渡過程升阻系數曲線Fig.4 Curves of CL and CD of case UAV in transition process
升力風扇和動力增升系統的額定功率和計算參數如表1 所示。
表1 計算參數和經驗系數Table 1 Calculation parameters and experience coefficient
2.1 計算結果
計算的案例無人機基于失速迎角的動力增升系統偏角—速度包線如圖5 所示,可以看出:懸停階段,動力增升系統合力偏轉角在75°左右,偏轉到固定翼飛行模式時的最小飛行速度為43 m/s。
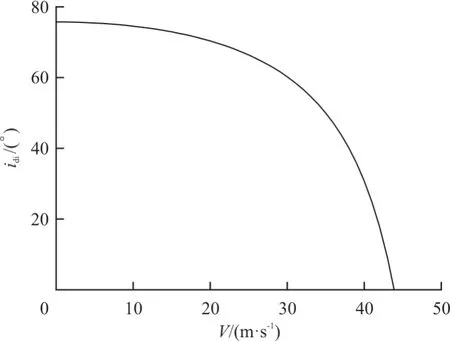
圖5 基于失速迎角的過渡走廊左邊界Fig.5 Left margin of transition corridor based on stall attack angle
過渡飛行包線內的升力風扇拉力、動力增升系統拉力、機體升力和阻力的變化曲線如圖6 所示,可以看出:懸停時,無人機的重力由升力風扇和動力增升系統拉力來平衡,隨著動力增升系統的偏轉,無人機的升力由動力部件(升力風扇和動力增升系統)逐漸過渡到無人機機翼來提供,隨著速度的增加,無人機的升力和阻力也隨之增大。
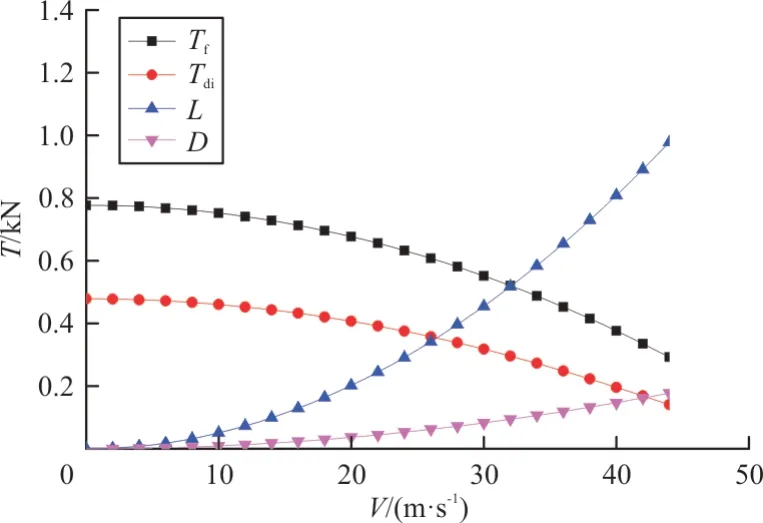
圖6 基于失速迎角的過渡走廊左邊界氣動力變化Fig.6 Aerodynamicforce change of transition corridor left margin based on stall attack angle
在不同姿態角下,無人機動力部件的總功率在過渡過程中隨飛行速度的變化曲線如圖7 所示。在功率限制的條件下,根據需用功率和最大可用功率相等,可得到基于功率的垂直起降固定翼無人機動力增升系統偏角—速度包線。從圖7 可以看出:在同一姿態角下隨著速度的增加,需用功率是先變小后變大,這與增升涵道的入流特性密切相關;大姿態角下過渡功率要比小迎角功率大,大迎角過渡在低速時便會觸發功率限制,因為姿態角越大,過渡過程中的阻力越大,所需的功率就越大。
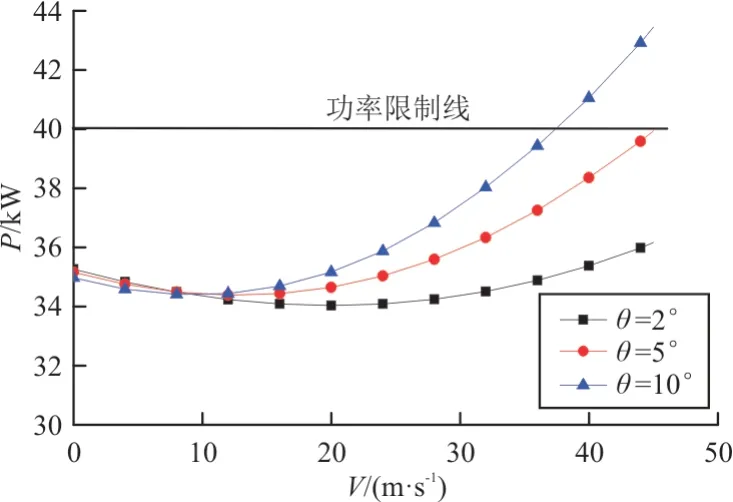
圖7 不同姿態角的過渡功率Fig.7 Transition power of different attitude angles
基于功率計算的過渡走廊右邊界如圖8所示,與圖5 不同的是在高速段,涵道合力偏角可以保持垂直,直到觸發功率限制,誘導增升系統才開始偏轉。
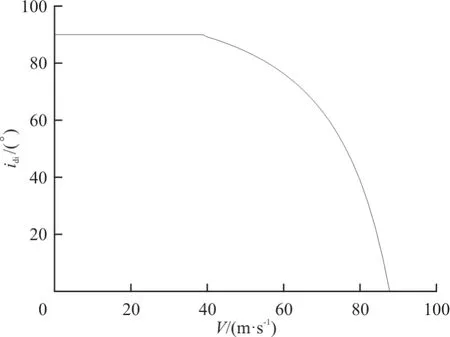
圖8 基于功率的過渡走廊右邊界Fig.8 Right margin of transition corridor based on power
將基于失速迎角計算的飛行包線與基于功率限制計算的飛行包線相結合,便可得出垂直起降固定翼無人機過渡飛行走廊,如圖9 所示,可以看出:低速段的過渡走廊左邊界是基于失速迎角的動力增升系統偏角—速度包線,高速段的右邊界是基于功率的動力增升系統偏角—速度包線,在兩個包線之間的過渡走廊中無人機可以完成過渡飛行。
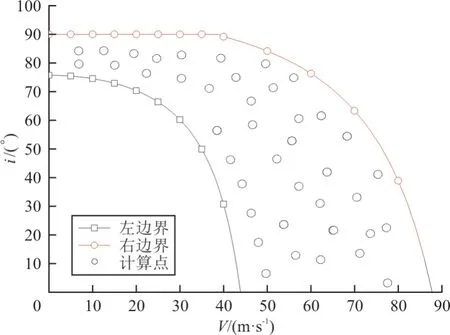
圖9 垂直起降固定翼無人機過渡飛行走廊Fig.9 Transition flight corridor of VLOT fix-wing UAV
2.2 操縱參數影響分析
垂直起降固定翼無人機的過渡飛行過程是連接垂直起降過程和固定翼平飛過程的中間過程,是垂直起降固定翼無人機的一個重要飛行模式。在過渡飛行過程中,動力增升系統不斷偏轉,氣動構型隨之變化,氣動力也隨之變化,其過渡飛行也是一種危險的飛行模式。垂直起降固定翼無人機的動力增升系統偏角—速度包線越大,其過渡飛行過程越容易實現。在飛行包線內,無人機的飛行姿態以及動力偏轉的快慢對過渡過程有一定影響,文中將從飛行姿態和增升涵道偏轉速度兩方面進行分析。
在過渡過程中,保證縱向平衡的前提下,不同的俯仰角過渡會有不同的過渡狀態特性,如圖10所示,可以看出:以大姿態角過渡飛行時,在較低的飛行速度下就能達到升阻平衡;而小姿態角過渡飛行時,需要較高的飛行速度才能達到升阻平衡,進一步完成飛行過渡。

圖10 不同姿態的過渡速度Fig.10 Transition speed at different attitudes
在不同的涵道偏轉角速率下,垂直起降固定翼無人機有不同的配平飛行能力。在動力系統允許的范圍內,涵道偏轉速度可以在1~14(°)/s 之間變化,如圖11~圖12 所示,當涵道偏轉速率超過14(°)/s 時,就會超出升力風扇的配平能力,不能完成過渡飛行。仿真計算結果是在無人機穩定平衡狀態下計算得出,在過渡時間為目標情況下,俯仰姿態角越小越好,動力增升系統偏轉越快;以動力系統力學特性為目標,優化可得在3°俯仰姿態角下,5(°)/s 的涵道偏轉角速度和1.5(°)/s 的增升翼面偏轉角速度能夠穩定地完成過渡。
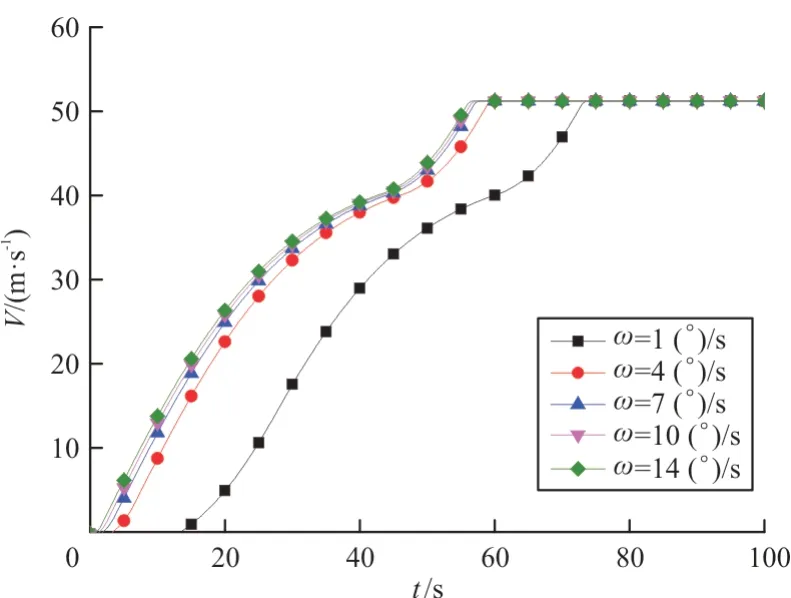
圖11 不同涵道偏轉速率的速度變化Fig.11 Speed change at different duct offset speed

圖12 不同涵道偏轉速率的動力變化Fig.12 Power change at different duct offset speed
2.3 擴大過渡走廊的方法
在飛行器設計過程中,垂直起降固定翼無人機的氣動參數對飛行包線的影響是直接的,本文從氣動參數方面對垂直起降固定翼無人機進行飛行包線分析,為垂直起降固定翼無人機過渡走廊設計提供方法。基于失速迎角的動力增升系統偏角—速度包線是由失速迎角下最大升力系數計算而得到的,而機翼的失速迎角主要受機翼面積、機翼升力系數、機翼安裝角等氣動參數的影響,因此基于失速迎角的動力增升系統偏角—速度包線將受到這些參數的影響,下面將分析這些參數對基于失速迎角的動力增升系統偏角—速度包線的影響。
機翼面積增加10%、20%、30%后基于失速迎角的動力增升系統偏角—速度包線變化圖如圖13 所示,失速迎角對應最大升力系數C增加10%、20%、30%后基于失速迎角的動力增升系統偏角—速度包線變化圖如圖14 所示,可以看出:改變機翼面積參數和最大失速升力系數可以改變基于失速迎角的動力增升系統偏角—速度包線的位置,以速度為標準,計算可得三種比例下過渡走廊分別擴大2.33%、4.66%、6.97%。增加機翼面積和增大最大失速升力系數都可以使飛行包線向懸停段移動,達到了擴大垂直起降固定翼無人機飛行走廊的目的。

圖13 機翼面積對過渡走廊左邊界影響Fig.13 Influence of wing area on left margin of transition corridor
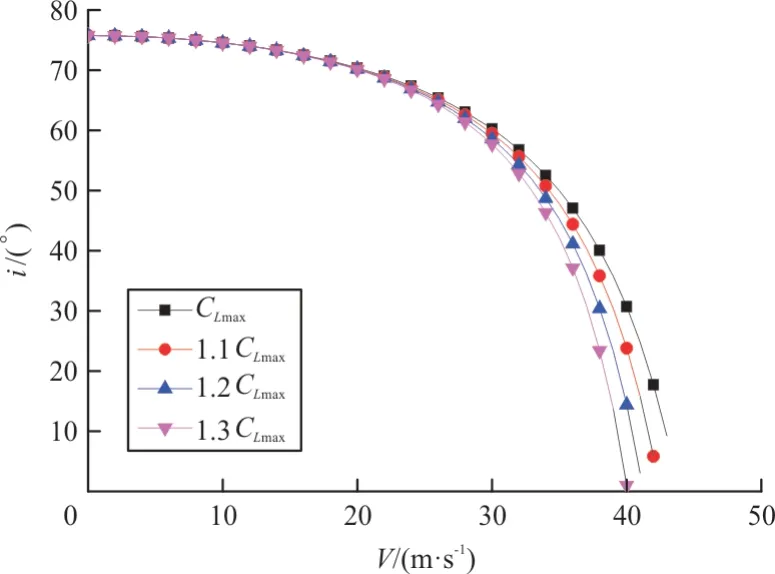
圖14 升力系數對過渡走廊左邊界影響Fig.14 Influence of lift coefficient on left margin of transition corridor
垂直起降固定翼無人機的右飛行走廊邊界是由基于功率的動力增升系統偏角—速度包線所確定,因此降低飛行狀態的需用功率或者增大飛行系統的可用功率,能夠改變基于功率的動力增升系統偏角—速度包線。將可用功率提高10%、20%之后的基于功率的動力增升系統偏角—速度包線如圖15 所示,可以看出:隨著可用功率的增大,基于功率的動力增升系統偏角—速度包線向右移動,從而擴大了飛行走廊邊界,以速度為標準,計算可得兩種比例下過渡走廊分別擴大21.43%、41.67%。
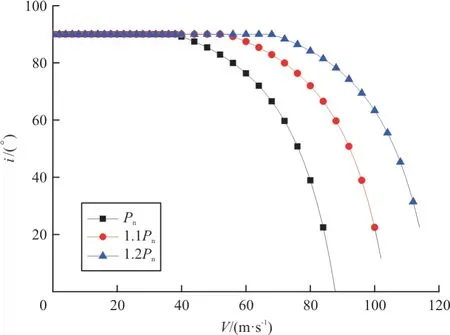
圖15 可用功率對飛行包線的影響Fig.15 Influence of available power on flight envelope
綜上所述,采用氣動參數的改善來擴大飛行走廊的效果要差于同百分比下采用可用功率的改善來擴大飛行走廊,即用功率參數來擴大飛行走廊要比用氣動參數來擴大飛行走廊效果更加顯著。通過擴大此類垂直起降固定翼無人機過渡飛行走廊,有利提高其過渡飛行安全性。
3 結 論
(1)文中所建立的涵道式垂直起降固定翼無人機動力增升系統偏角—速度包線能夠很好地描述此類垂直起降固定翼無人機的過渡飛行走廊。
(2)此類垂直起降固定翼無人機的過渡飛行走廊左邊界是由過渡飛行時的最大升力系數確定,而右邊界是由最大可用功率確定。
(3)在過渡飛行過程中,以小姿態角過渡完成時間最短,而大姿態角過渡動力偏轉較慢,完成過程時間長。
(4)通過提高功率參數來擴大過渡走廊比提高氣動參數擴大過渡走廊效果更加明顯,可用功率提高10%可以使過渡走廊擴大21.43%,而機翼面積或者升力系數提高10%僅使過渡走廊擴大約2.33%。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
