欠驅動搬運機器人軌跡跟蹤控制
2022-02-22 11:47:50張婷婷張偉王亞剛
包裝工程 2022年3期
張婷婷,張偉,王亞剛
欠驅動搬運機器人軌跡跟蹤控制
張婷婷,張偉,王亞剛
(上海理工大學 光電信息與計算機工程學院上海 200093)
為了解決欠驅動搬運機器人的中心和質心不重合的軌跡跟蹤問題。建立非完整性約束的欠驅動機器人的運動學和動力學的模型,基于反步法控制策略生成新的虛擬反饋量,設計跟蹤控制器,同時,利用自適應技術對具有不確定跟蹤控制器的參數進行校正,通過Lyapunov理論驗證控制器的穩定性。仿真實驗結果表明,欠驅動搬運機器人的實際軌跡可以快速地跟蹤期望軌跡,驗證了基于反步法設計的跟蹤控制器的可行性和有效性。設計的控制器能夠使搬運移動機器人達到良好的軌跡跟蹤效果,并且保證了控制器的自適應性。
欠驅動搬運機器人;軌跡跟蹤;反步法;自適應;Lyapunov
搬運機器人廣泛應用于工業生產,其中叉車型搬運機器人是工業上常見的典型搬運機器人,隨著科技的快速發展以及生產生活的需求,AGV(Automated guided vehicle)孕育而生。AGV是一種新型的智能搬運機器人,具有智能化,高精度,實現“人到貨”與“貨到人”主旨。它根據實際需要,設計多種類型來適用于不同的環境。其中大部分AGV基于輪式移動機器人(WMR)研發。近年來,WMR的控制吸引了研究者的關注[1-8]。輪式移動機器人(WMR)是一種結構簡單,靈活性高、自主性強、操作性能好的通用移動機器人。為了提高移動機器人的自主性,研究的內容一般集中在移動機器人定位[1-2],穩定性[3-4],軌跡跟蹤控制[5-6],路徑規劃[7-8],避障[9]等問題。
文中研究軌跡跟蹤問題,由于WMR自身的結構問題,WMR在電機加工過程中會受到純粹的非完整約束[10],因此在運動過程中會受到非完整系統的控制。對此,Hisao等[11]通過將“靜態”和“動態”狀態反饋線性化來解決參考軌跡的穩定性跟蹤問題。賈鶴鳴等[12],引入反步法用于移動機器人的跟蹤控制中,通過反步法設計控制器,引入虛擬控制速率,并通過Lyapunov理論證明控制器的穩定性。對此,反步法設計的控制器廣泛應用于WMR軌跡跟蹤理論中。對于輪式移動機器人建立的模型出現外界干擾或是參數不確定性的問題,徐俊艷等[13]基于反步法的基礎上,結合了自適應模糊滑模控制算法來調節參數。周加全等[14]采用反步法與神經網絡算法設計控制器,對不確定項補償,提高軌跡跟蹤的精度。趙珈靚等[15]考慮機器人未知擾動的情況下,利用反步法思想設計線性自抗擾控制器。
上述文獻的研究都是假定基于WMR的質心與中心是同一位置的情況下分析軌跡跟隨,但是,由于機器人硬件設備(微處理器,驅動器和傳感器等)放置以及機器人搭載設備組件的原因,WMR的質心和中心大多數是不重合的。針對移動機器人的質心與中心未在同一位置情況下(中心是指機器人驅動輪軸線的中心),文中基于反步法(Back-stepping)設計一種用于產生速度指令運動控制器,由于機器人質心與中心不重合,運動學模型出現未知參數,文中引入自適應方案來調節未知參數,利用Lyapunov理論證明系統的穩定性。為了使中心和質心不重合搬運機器人快速跟蹤期望軌跡,提出基于反步法控制策略。
1 移動機器人的模型建立
1.1 運動學模型
文中研究的搬運機器人為AGV的一種欠驅動非完整約束性輪式移送機器人。輪式移動機器人根據左右2個輪來驅動,從而實現機器人的姿態。利用坐標系建立搬運機器人的運動學的模型見圖1。針對非完整系統移動機器人的模型作假設條件:驅動輪與地面之間的接觸為純滾動且無打滑;機器人的質心與中心不重合。

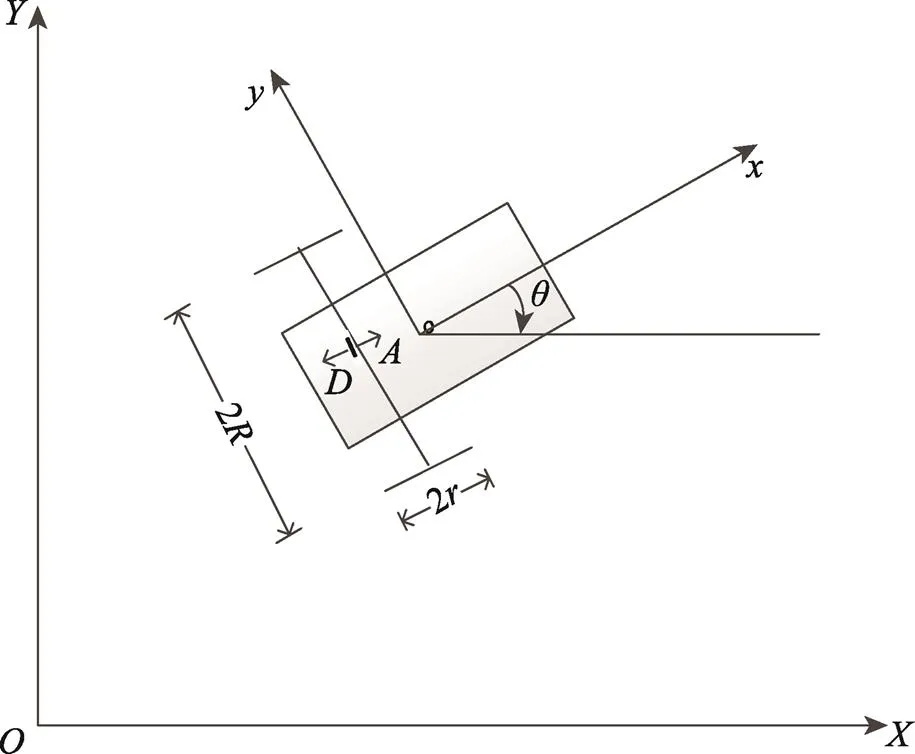
圖1 搬運機器人的運動學模型
搬運機器人在純滾動下的約束方程為:
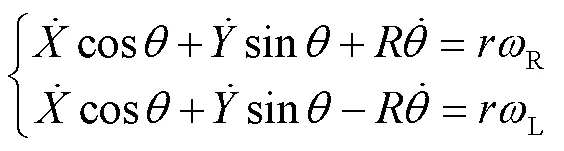
車輪在無側滑的約束方程為:

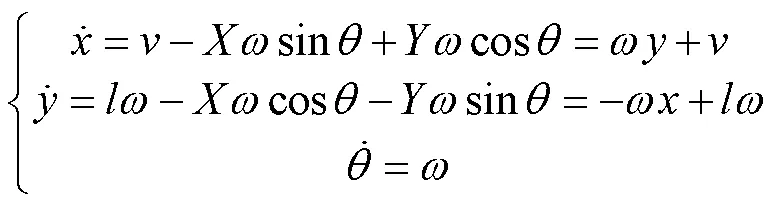
由式(1),式(2)可得機器人的運動學方程:
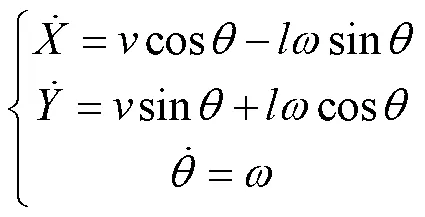
搬運移動機器人位姿的狀態方程為:

1.2 搬運機器人動力學描述
移動機器人的動力學模型有4種表示方式:拉格朗日法、牛頓-歐拉法、參數分離法、最小慣性表示法。文中在不考慮外界干擾和摩擦力情況下,采用拉格朗日動力學方程,欠驅動搬運機器人的動力學方程可表示為:


2 軌跡跟蹤誤差模型的建立
地球坐標系與本體坐標變換的關系可表示為:
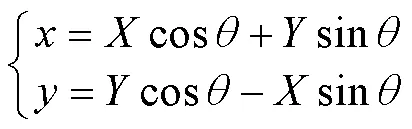
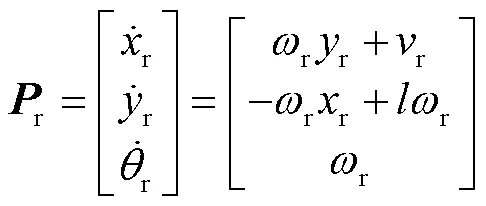
由式(7)可將欠驅動移動機器人運動學方程可轉換為:
搬運移動機器人的軌跡跟蹤誤差模型見圖2。
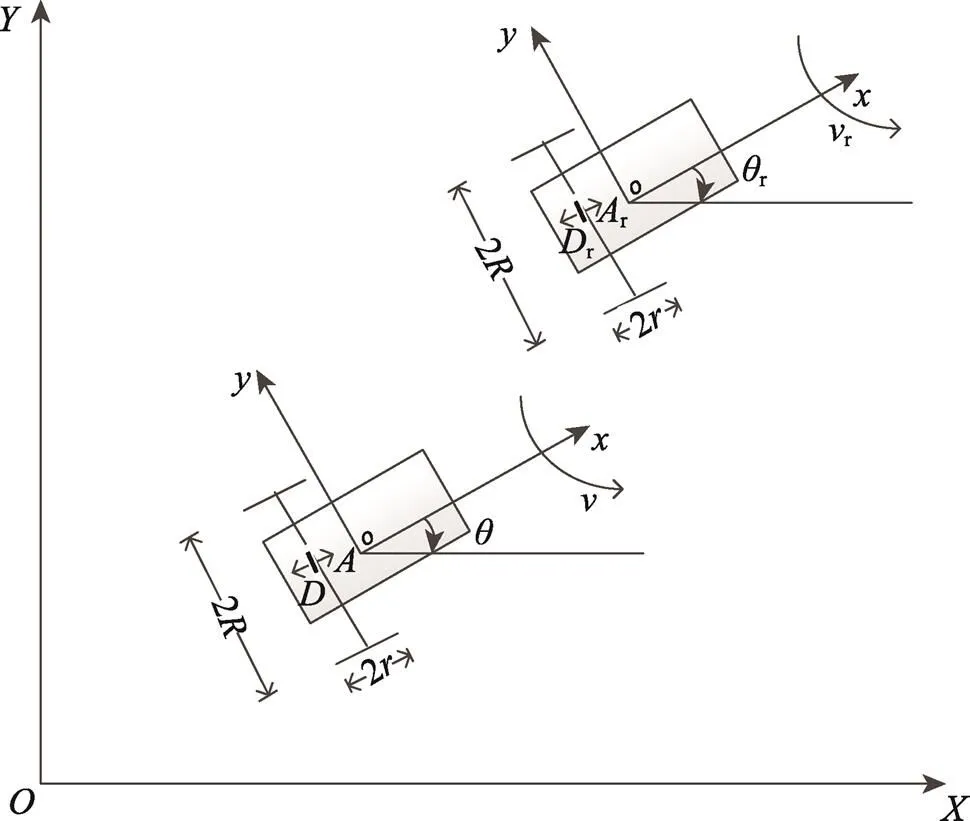
圖2 搬運機器人的跟蹤誤差模型
設機器人的跟蹤位置誤差為:
機器人的跟蹤位置誤差的微分方程為:

3 反步法控制器設計


圖3 搬運機器人的軌跡跟蹤的系統結構
對式(13)微分得:

設計速度控制率為:
設期望的速度誤差為:

證明:
取李雅普諾夫函數:

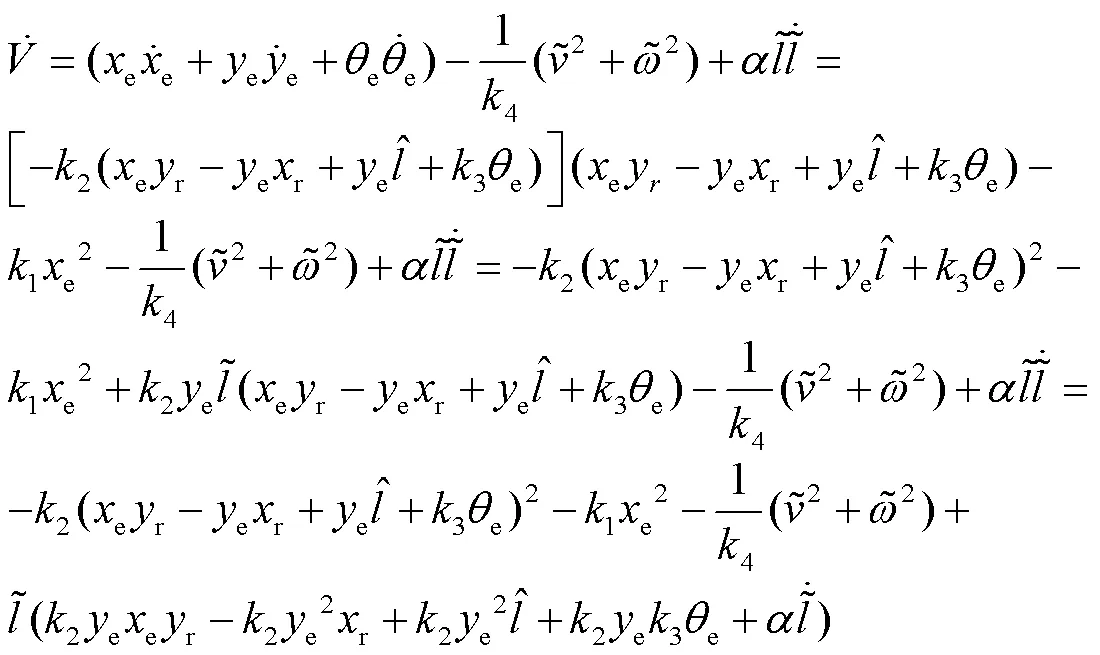
李雅普諾夫函數的微分為:

4 系統仿真
從圖4可以看出,采用反步法(Back-Stepping)與自適應技術的跟蹤控制的搬運機器人的軌跡跟蹤有良好的效果。根據圖5中可觀察出,系統的跟蹤誤差收斂得較快,在0時刻跟蹤誤差可收斂至0。圖6中的控制輸入隨參數校正而變化,圖7是機器人質心與中心的估計值隨時間的響應曲線,表明了位置參數的有界性。通過Matlab仿真驗證文中設計的跟蹤控制器的有效性。
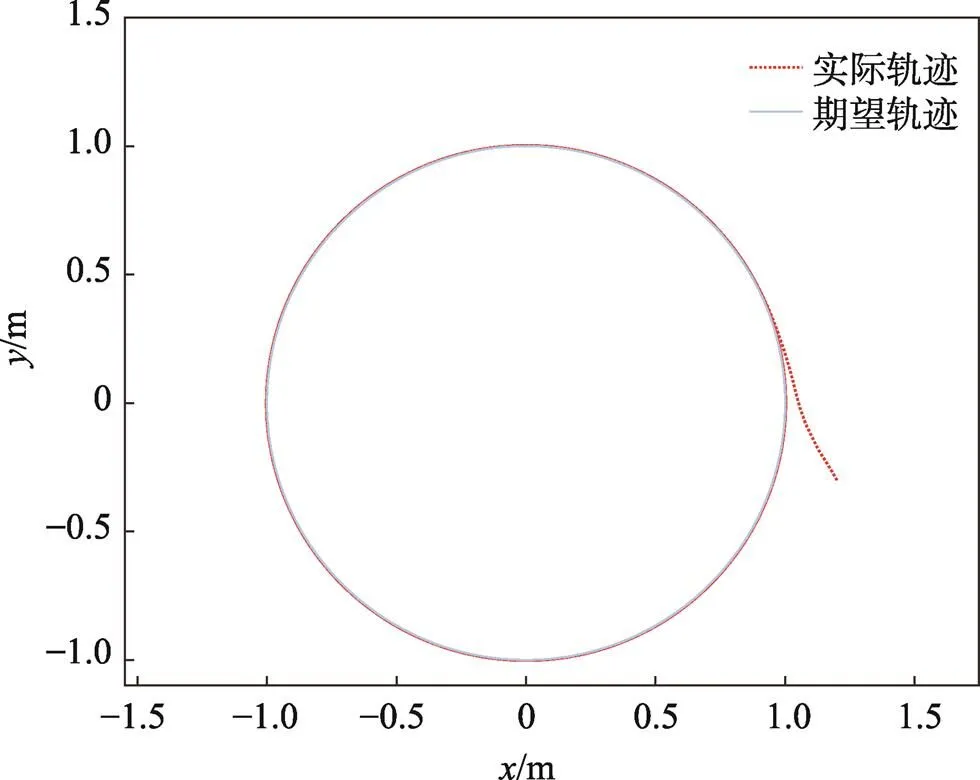
圖4 搬運機器人軌跡跟蹤結果
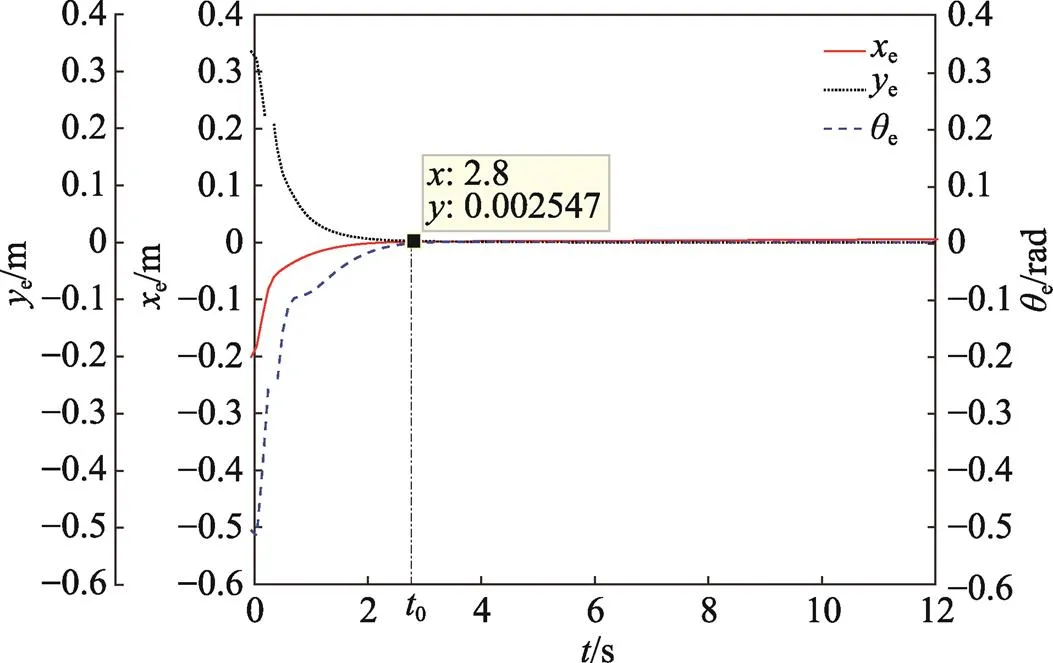
圖5 誤差收斂效果
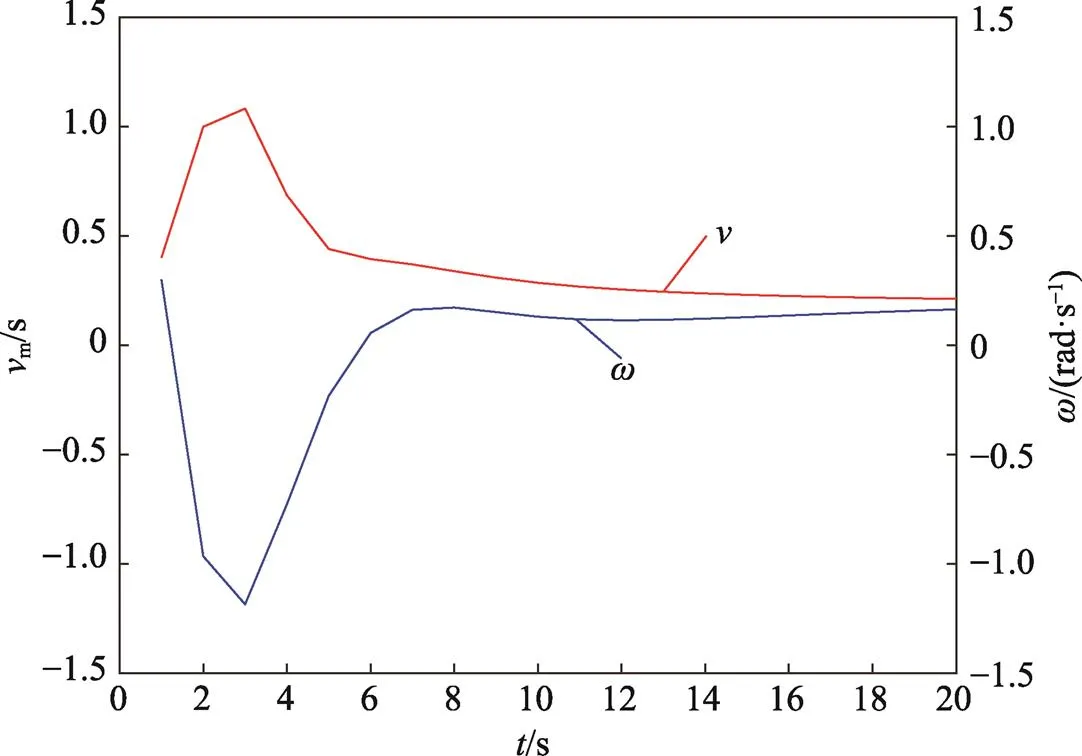
圖6 控制輸入變化

根據圖8—10的對實驗中,發現系統在文中提出的控制器器的e,e都收斂至0,但是文獻[17]中e沒有收斂至0,因此,文中提出的控制器使得移動機器人在誤差較大的情況下是有效的。
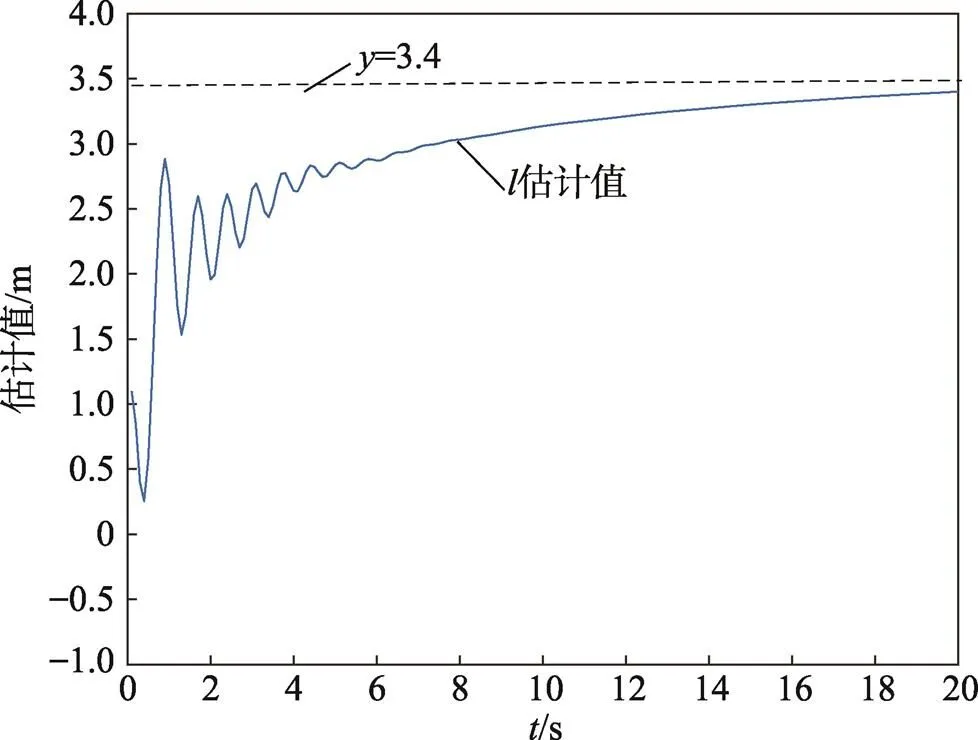
圖7 估計值變化
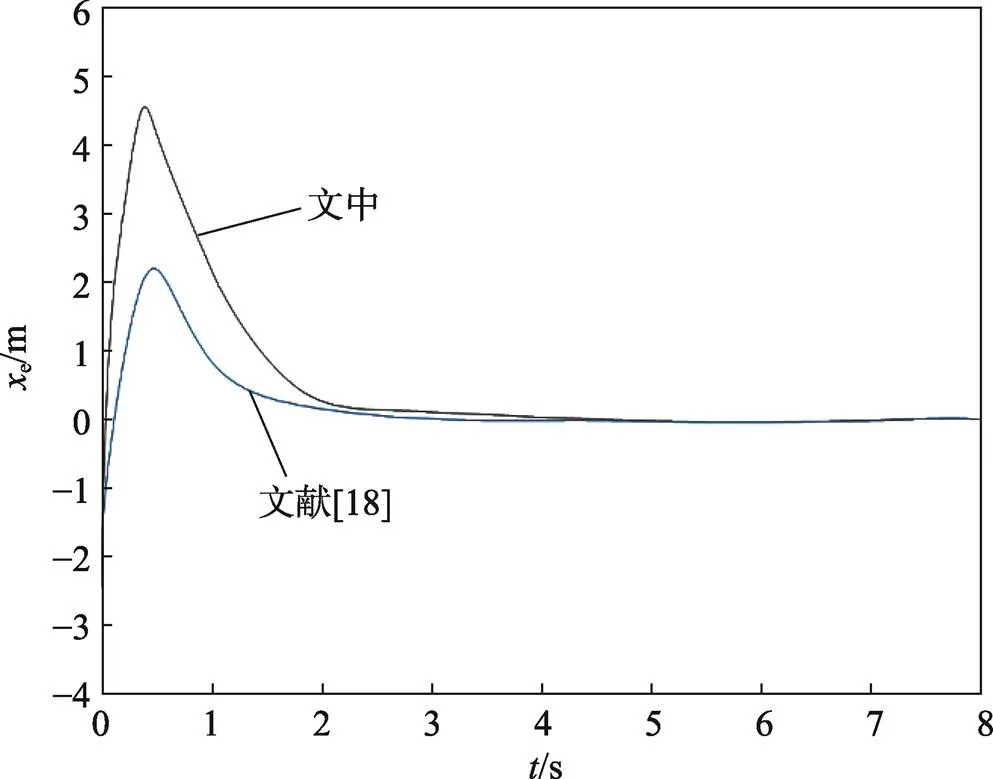
圖8 xe收斂對比
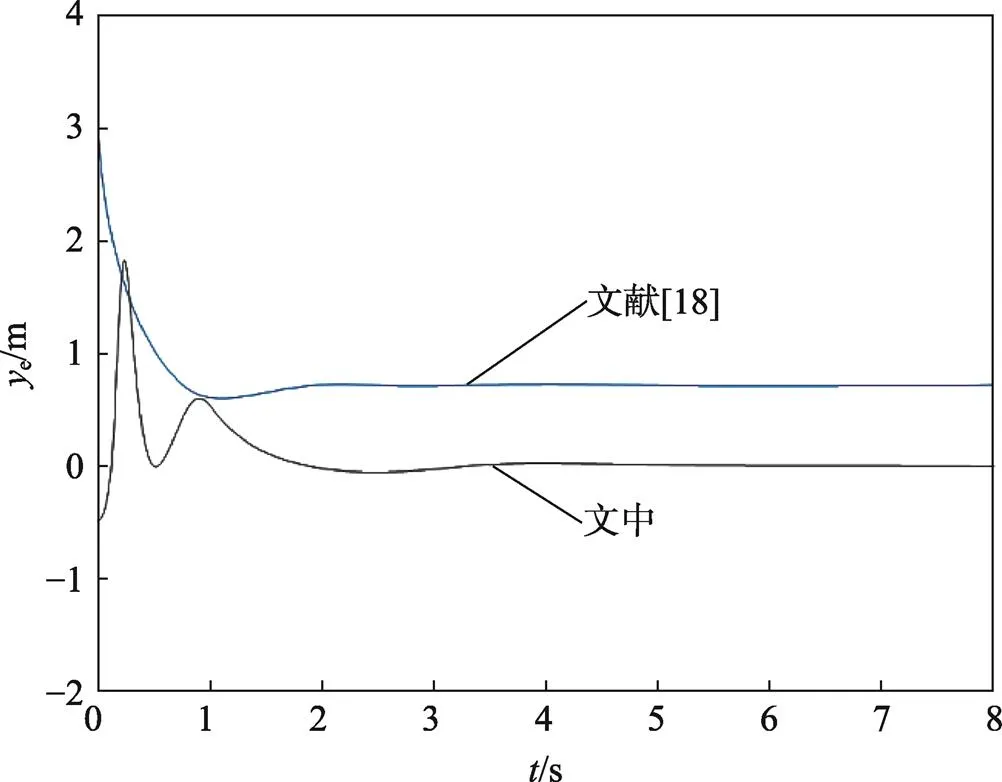
圖9 ye收斂對比
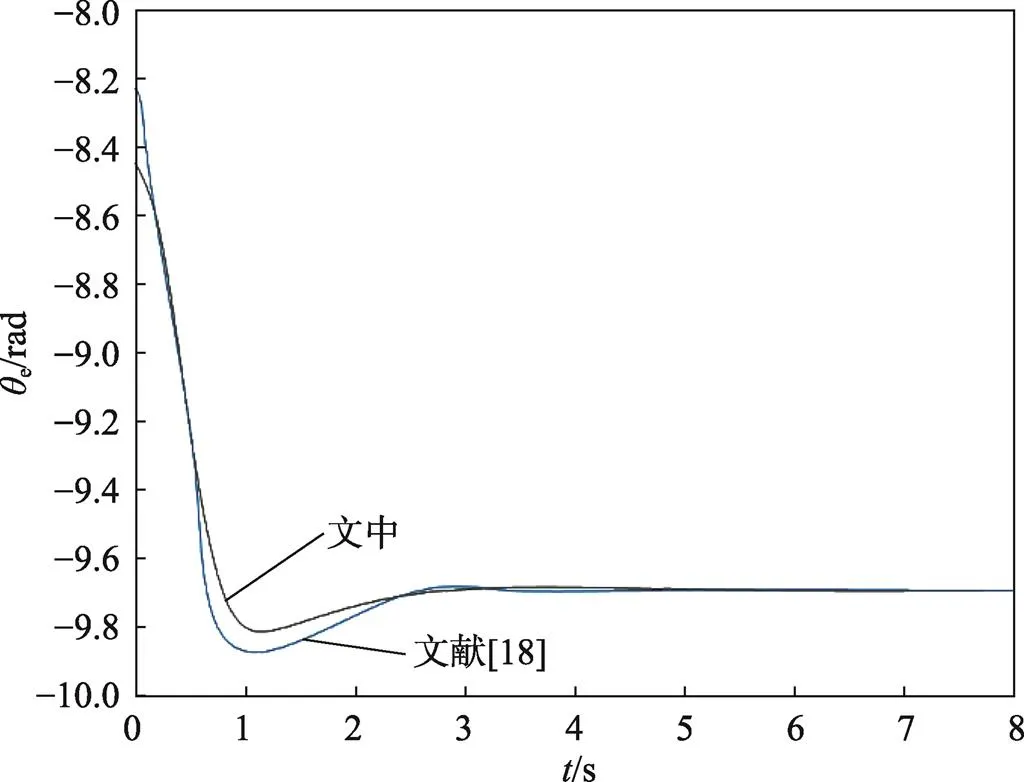
圖10 θe收斂對比
5 結語
文中針對欠驅動非完整性搬運機器人的軌跡跟蹤問題,設計了跟蹤控制器。在搬運機器人的質心和中心不重合的情況下,建立機器人運動學和動力學方程時,出現了不確定的參數。為了解決不確定參數的問題,通過反步法設計控制器,并設計參數估計值的自適應技術滿足了軌跡跟蹤控制器,并且利用Lyapunov穩定理論驗證系統的全局穩定。文中設計的控制器通過反步法與自適應技術的結合,良好地實現搬運移動機器人的軌跡跟蹤。
[1] Jetto L, Longhi S, Vitali D. Localization of a Wheeled Mobile Robot by Sensor Data Fusion Based on a Fuzzy Logic Adapted Kalman Filter[J]. Control Engineering Practice, 1999, 7(6): 763-771.
[2] SUN Chung-hun, HUANG Sheng-kai, YE Cheng-wei, et al. Laser-Range-Finder Localization Based Fuzzy Control for Mobile Robots[J]. Engineering Computations, 2017, 34(7): 2409-2421.
[3] DING Shi-hong, LI Shi-hua, LI Qi. Global Uniform Asymptotical Stability of a Class of Nonlinear Cascaded Systems with Application to a Nonholonomic Wheeled Mobile Robot[J]. International Journal of Systems Science, 2010, 41(11): 1301-1312.
[4] Arman M, Saeed E. Simultaneous Surface Scanning and Stability Analysis of Wheeled Mobile Robots Using a New Spatial Sensitive Shield Sensor[J]. Robotics and Autonomous Systems, 2017, 98(7): 1-14.
[5] Du Li-min. Double Closed Loop Controller of Wheeled Mobile Robot for Trajectory Tracking Based on Back-Stepping and Lyapunov Method[C]// Research Institute of Management Science and Industrial Engineering. Proceedings of 2017 2nd International Conference on Materials Science, Machinery and Energy Engineering, 2017: 1400-1406.
[6] 賴欣, 陸陽, 周樂, 等. 輪式移動機器人的Back-stepping滑模模糊自適應軌跡跟蹤控制[J]. 機械科學與技術, 2018, 37(12): 1834-1840.
LAI Xin, LU Yang, ZHOU Le, et al. Trajectory Tracking with Back-Stepping Sliding Mode Fuzzy Adaptive Control for Wheeled Mobile Robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2018, 37(12): 1834-1840.
[7] BAI Guo-xing, Meng Yu, Liu Li, et al. Anti-Sideslip Path Tracking of Wheeled Mobile Robots Based on Fuzzy Model Predictive Control[J]. Electronics Letters, 2020, 56(10): 490-493.
[8] Noboru N, Kazunobu I, Hideo T. Turning Function Based on Dynamic Path Creation for Agricultural Mobile Robot[J]. IFAC Proceedings Volumes, 2001, 34(19): 191-195.
[9] 柴慧敏, 陳奮增, 方敏, 等. 貝葉斯網絡與模糊理論的移動機器人避障[J]. 控制工程, 2020, 27(10): 1657-1664.
CHAI Hui-min, CHEN Fen-zeng, FANG Min, et al. Obstacle Avoidance for Mobile Robot Based on Bayesian Networks Model and Fuzzy Theory[J]. Control Engineering of China, 2020, 27(10): 1657-1664.
[10] Komanovsky H, Macclam R H. Developments in Nonholonomic Control System[J]. IEEE Control Systems Magazine, 1995, 15(6): 20-36.
[11] Hisao N, Kazuhiro S, Kenshi S. Vibration Control of a Wheeled Mobile Robot Based on Disturbance Observer[J]. JSME International Journal, 1993, 36(4): 442-447.
[12] 賈鶴鳴, 宋文龍, 陳子印, 等. 基于神經網絡反步法的移動機器人路徑跟蹤控制[J]. 南京理工大學學報(自然科學版), 2014, 38(1): 27-33.
JIA He-ming, SONG Wen-long, CHEN Zi-yin, et al. Path Following Controller for Mobile Robots Based on Neural Network Backstepping[J]. Journal of Nanjing University of Science and Technology, 2014, 38(1): 27-33.
[13] 徐俊艷, 張培仁. 非完整輪式移動機器人軌跡跟蹤控制研究[J]. 中國科學技術大學學報, 2004, 34(3): 376-380.
XU Jun-yan, ZHANG Pei-ren. Research on Trajectory Tracking Control of Nonholonomic Wheeled Mobile Robots[J]. Journal of University of Science and Technology of China, 2004, 34(3): 376-380.
[14] 周加全, 譚麗娟, 李志明, 等. 移動機器人軌跡跟蹤控制的研究[J]. 電腦知識與技術, 2020, 16(31): 219-221.
ZHOU Jia-quan, TAN Li-juan, LI Zhi-ming, et al. Research on Trajectory Tracking Control of Mobile Robot[J]. Computer Knowledge and Technology, 2020, 16(31): 219-221.
[15] 趙珈靚. 基于自抗擾控制的全方位移動機器人軌跡跟蹤研究[D]. 天津: 天津大學, 2018: 17-39.
ZHAO Jia-liang. Trajectory Tracking of Omnidirectional Mobile Robot based on Active Disturbance Rejection Control[D]. Tianjin: Tianjin University, 2018: 17-39.
[16] TAO G. A Aimple Alternative to The Barbalat lemma[J]. IEEE Transactions on Automatic Control, 2002, 42(5): 698.
[17] 宋立業, 邢飛. 移動機器人自適應神經滑模軌跡跟蹤控制[J]. 控制工程, 2018, 25(11): 1965-1970.
SONG Li-ye, XING Fei. Adaptive Neural Sliding Mode Trajectory Tracking Control for Mobile Robots[J]. Control Engineering of China, 2018, 25(11): 1965-1970.
Trajectory Tracking Control of Under-Actuated Handling Robot
ZHANG Ting-ting, ZHANG Wei, WANG Ya-gang
(School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China)
The work aims to solve the trajectory tracking problem of a class of under-actuated handling robots when the centroid and the center are not coincident. The kinematics and dynamics models of under-actuated robot with nonholonomic constraints were established. Based on the back-stepping control theory, a new virtual feedback was constructed and a tracking controller was designed. At the same time, the adaptive technique was introduced to correct the parameters of the tracking controller with uncertainties. The global stability of the control system was proved by Lyapunov theory. The simulation results showed that the actual trajectory of the under-actuated handling robot could quickly follow the desired path. The feasibility and effectiveness of the tracking controller based on back-stepping method were verified.The designed controller can make the handling robot achieve good trajectory tracking results, and ensure the adaptivity of the controller.
under-actuated handling robot; trajectory tracking;back-stepping; adaptivity; Lyapunov
TB486;TP301.6
A
1001-3563(2022)03-0210-07
10.19554/j.cnki.1001-3563.2022.03.026
2021-08-26
國家自然科學基金項目(11502145, 61703277, 61074087)
張婷婷(1996—),女,上海理工大學碩士生,主攻軌跡跟蹤。
張偉(1981—),男,博士,上海理工大學副教授,主要研究方向為最優控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31