基于RPY的電纜溝智能巡檢機(jī)器人運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析
2022-02-23 13:34:48顏愛(ài)平肖慧慧
學(xué)習(xí)與科普 2022年10期
顏愛(ài)平 肖慧慧





摘要:電纜溝環(huán)境復(fù)雜,人工巡檢存在安全隱患,目前主要采用履帶式智能巡檢機(jī)器人進(jìn)行巡檢。本文運(yùn)用RPY建立相對(duì)坐標(biāo)系,主要分析機(jī)器人的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)。通過(guò)對(duì)智能巡檢機(jī)器人運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)的分析,不僅為跟蹤智能巡檢機(jī)器人的運(yùn)動(dòng)軌跡控制設(shè)計(jì)奠定了基礎(chǔ),機(jī)器人巡檢所獲得的數(shù)據(jù)還能為電力調(diào)控提供科學(xué)依據(jù)。
關(guān)鍵詞:電纜溝;巡檢機(jī)器人;相對(duì)坐標(biāo);運(yùn)動(dòng)學(xué);動(dòng)力學(xué)
電纜溝是布置在地面下的管道,主要用來(lái)敷設(shè)、更換電力與電訊電纜設(shè)施。由于電纜溝環(huán)境復(fù)雜,內(nèi)設(shè)有支架,檢修空間較小,檢修人員存在作業(yè)風(fēng)險(xiǎn),目前主要采用履帶式智能巡檢機(jī)器人進(jìn)行巡檢。機(jī)器人巡檢時(shí)需要考慮:第一,安裝在機(jī)器人車(chē)體上的傳感器只能獲取在其坐標(biāo)系范圍內(nèi)的信息;第二,履帶式智能巡檢機(jī)器人在行駛時(shí)履帶受力不均勻,且機(jī)器人在前行或轉(zhuǎn)彎時(shí)很容易產(chǎn)生滑動(dòng)。基于這兩個(gè)問(wèn)題,本文從智能巡檢機(jī)器人RPY坐標(biāo)系的建立、運(yùn)動(dòng)學(xué)方程建模、動(dòng)力學(xué)建模三個(gè)方面進(jìn)行了分析。
一、RPY坐標(biāo)系的建立
由于安裝在車(chē)體上的傳感器只能獲取在車(chē)體坐標(biāo)系范圍內(nèi)的信息,因此,在運(yùn)動(dòng)學(xué)建模前要對(duì)坐標(biāo)系進(jìn)行轉(zhuǎn)換。
如圖1所示,將機(jī)器人結(jié)構(gòu)簡(jiǎn)化,根據(jù)RPY變換方法建立坐標(biāo)系[1]。OXYZ為大地坐標(biāo)系,表示機(jī)器人整體所在的位置信息;O1X1Y1Z1為車(chē)體坐標(biāo)系,固定在車(chē)體上,表示機(jī)器人系統(tǒng)的局部位置信息,車(chē)體坐標(biāo)系隨車(chē)體移動(dòng)。
假設(shè)初始狀態(tài)時(shí),車(chē)體坐標(biāo)系O1X1Y1Z1與大地坐標(biāo)系OXYZ重合,當(dāng)機(jī)器人沿X1軸方向前進(jìn)時(shí),車(chē)體繞X1軸旋轉(zhuǎn)角度為;繞Y1軸旋轉(zhuǎn)角度為;繞Z1軸旋轉(zhuǎn)角度為,也稱(chēng)為偏航角,繞OX1軸逆時(shí)針?lè)较驗(yàn)檎t機(jī)器人車(chē)體分別繞X1軸、Y1軸、Z1軸旋轉(zhuǎn)后,相對(duì)于大地坐標(biāo)系的旋轉(zhuǎn)矩陣式如式(1)所示[2]:
在圖1的二維平面XOY中,車(chē)體坐標(biāo)系相對(duì)大地坐標(biāo)系繞Z軸旋轉(zhuǎn)了,規(guī)定逆時(shí)針?lè)较驗(yàn)檎t車(chē)體坐標(biāo)系到大地坐標(biāo)系的轉(zhuǎn)換矩陣為:
二、巡檢機(jī)器人運(yùn)動(dòng)學(xué)方程建模
由于履帶式機(jī)器人移動(dòng)時(shí),履帶與地面有滑動(dòng)摩擦,考慮摩擦因素影響,基于動(dòng)力學(xué)平衡方程建立與實(shí)際情況相符合的滑動(dòng)模型[3]。因此在建立運(yùn)動(dòng)學(xué)模型前,要作如下假設(shè): ①把機(jī)器人的履帶與車(chē)體看作剛體; ②機(jī)器人低速運(yùn)動(dòng),且履帶均勻接地;③機(jī)器人的質(zhì)心位于車(chē)體的中心位置。
當(dāng)機(jī)器人在XOY水平面運(yùn)動(dòng)時(shí),從整體上看,可視為是圍繞瞬時(shí)中心(Oc)做圓周運(yùn)動(dòng),如圖2所示。
由于機(jī)器人質(zhì)心的運(yùn)動(dòng)由平移速度與旋轉(zhuǎn)角速度組成,當(dāng)車(chē)體產(chǎn)生滑動(dòng),相對(duì)于軸有偏移量d。在坐標(biāo)上的投影分別為vx1、vy1,在上的投影為;表示點(diǎn)與原點(diǎn)的直線與機(jī)器人坐標(biāo)系軸的夾角;表示到的旋轉(zhuǎn)半徑;表示到的旋轉(zhuǎn)半徑。
根據(jù)運(yùn)動(dòng)學(xué)分析,以兩側(cè)的履帶主驅(qū)動(dòng)輪的轉(zhuǎn)速、作為輸入,用機(jī)器人的車(chē)體坐標(biāo)系運(yùn)動(dòng)學(xué)方程乘式(2)的轉(zhuǎn)換矩陣,得機(jī)器人的車(chē)體相對(duì)于大地坐標(biāo)系的運(yùn)動(dòng)學(xué)模型方程為:
三、巡檢機(jī)器人動(dòng)力學(xué)方程建模
履帶式智能巡檢機(jī)器人運(yùn)動(dòng)過(guò)程中受力較復(fù)雜,為分析智能巡檢機(jī)器人的受力情況,規(guī)定以下假設(shè)條件:
(1)機(jī)器人整機(jī)重量均勻分布在兩側(cè)的履帶上,其對(duì)地壓力均勻分布在履帶中心線的兩側(cè);
(2)不考慮地面不平整與沉陷引起的履帶與地面間的相互作用;
(3)巡檢機(jī)器人車(chē)體的質(zhì)心與重心重合。
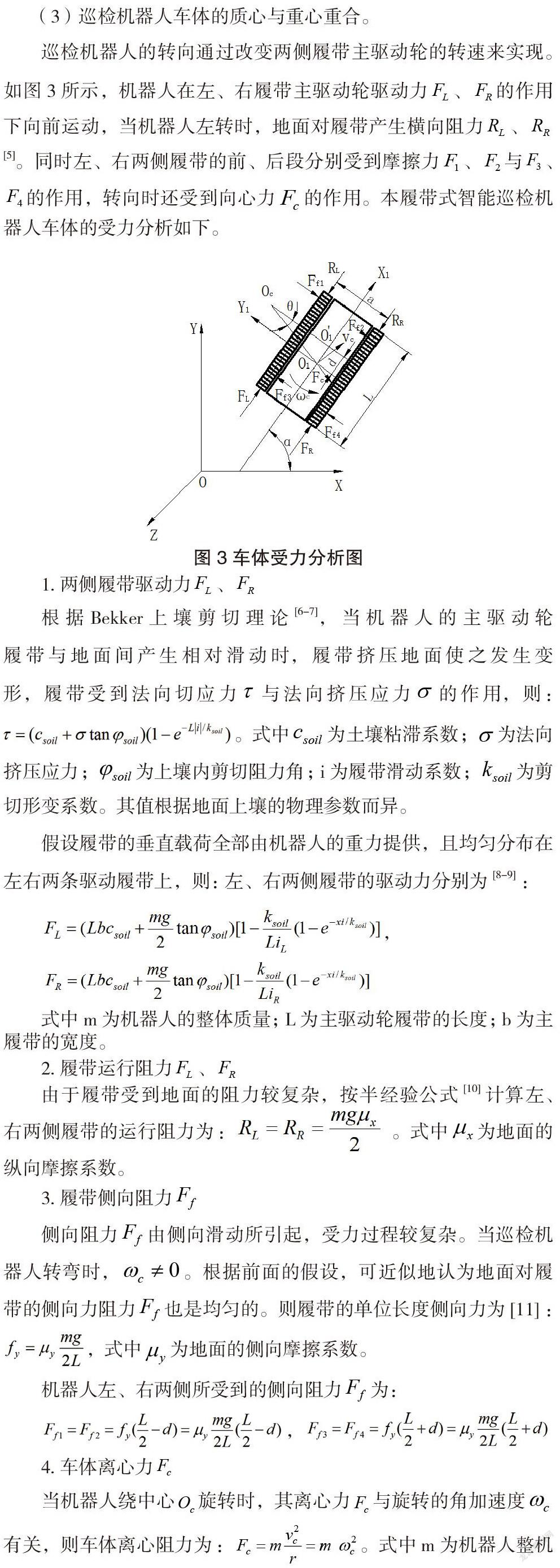
巡檢機(jī)器人的轉(zhuǎn)向通過(guò)改變兩側(cè)履帶主驅(qū)動(dòng)輪的轉(zhuǎn)速來(lái)實(shí)現(xiàn)。如圖3所示,機(jī)器人在左、右履帶主驅(qū)動(dòng)輪驅(qū)動(dòng)力、的作用下向前運(yùn)動(dòng),當(dāng)機(jī)器人左轉(zhuǎn)時(shí),地面對(duì)履帶產(chǎn)生橫向阻力、[5]。同時(shí)左、右兩側(cè)履帶的前、后段分別受到摩擦力、與、的作用,轉(zhuǎn)向時(shí)還受到向心力的作用。本履帶式智能巡檢機(jī)器人車(chē)體的受力分析如下。
1.兩側(cè)履帶驅(qū)動(dòng)力、
根據(jù)Bekker上壤剪切理論[6-7],當(dāng)機(jī)器人的主驅(qū)動(dòng)輪履帶與地面間產(chǎn)生相對(duì)滑動(dòng)時(shí),履帶擠壓地面使之發(fā)生變形,履帶受到法向切應(yīng)力與法向擠壓應(yīng)力的作用,則:式中為土壤粘滯系數(shù);為法向擠壓應(yīng)力;為上壤內(nèi)剪切阻力角;i為履帶滑動(dòng)系數(shù);為剪切形變系數(shù)。其值根據(jù)地面上壤的物理參數(shù)而異。
式中m為機(jī)器人的整體質(zhì)量;L為主驅(qū)動(dòng)輪履帶的長(zhǎng)度;b為主履帶的寬度。
2.履帶運(yùn)行阻力、
由于履帶受到地面的阻力較復(fù)雜,按半經(jīng)驗(yàn)公式[10]計(jì)算左、右兩側(cè)履帶的運(yùn)行阻力為: 。式中為地面的縱向摩擦系數(shù)。
3.履帶側(cè)向阻力
側(cè)向阻力由側(cè)向滑動(dòng)所引起,受力過(guò)程較復(fù)雜。當(dāng)巡檢機(jī)器人轉(zhuǎn)彎時(shí),。根據(jù)前面的假設(shè),可近似地認(rèn)為地面對(duì)履帶的側(cè)向力阻力也是均勻的。則履帶的單位長(zhǎng)度側(cè)向力為[11]:,式中為地面的側(cè)向摩擦系數(shù)。
機(jī)器人左、右兩側(cè)所受到的側(cè)向阻力為:
4.車(chē)體離心力
當(dāng)機(jī)器人繞中心旋轉(zhuǎn)時(shí),其離心力與旋轉(zhuǎn)的角加速度有關(guān),則車(chē)體離心阻力為:。式中m為機(jī)器人整機(jī)質(zhì)量;r為到的旋轉(zhuǎn)半徑;為車(chē)體繞的旋轉(zhuǎn)角速度。
5.建立動(dòng)力學(xué)模型
假設(shè)左、右兩驅(qū)動(dòng)輪的滑動(dòng)系數(shù)相等,即。通過(guò)以上分析,建立智能巡檢機(jī)器人全局坐標(biāo)系的動(dòng)力學(xué)方程為:
四、小結(jié)
本文在建立的RPY坐標(biāo)系下,考慮智能巡檢機(jī)器人的滑移運(yùn)動(dòng),分別建立了智能巡檢機(jī)器人運(yùn)動(dòng)學(xué)模型、動(dòng)力學(xué)模型。動(dòng)力學(xué)模型充分考慮了履帶與地面間的作用力,使得建立的動(dòng)力學(xué)模型更加準(zhǔn)確可靠,從而為控制系統(tǒng)跟蹤智能巡檢機(jī)器人在電纜溝中的運(yùn)動(dòng)軌跡奠定了基礎(chǔ)。
參考文獻(xiàn):
[1]中國(guó)工程建設(shè)標(biāo)準(zhǔn)化協(xié)會(huì)建筑施工專(zhuān)業(yè)委員會(huì).工程建設(shè)常用專(zhuān)業(yè)詞匯手冊(cè)[M].中國(guó)建筑工業(yè)出版社,2006.
[2]胡晗,程建明,牛志剛.基于RPY的煤礦井下探測(cè)機(jī)器人越障分析[J].煤礦機(jī)械, 2013,34(011):109-111.
[3]商德勇.薄煤層綜采工作面巡檢機(jī)器人運(yùn)動(dòng)分析及試驗(yàn)研究[D].中國(guó)礦業(yè)大學(xué)(北京).
[4]王偉東.面向復(fù)雜地面環(huán)境的作業(yè)型履帶式移動(dòng)機(jī)器人研究 [D].哈爾濱:哈爾濱工業(yè)大學(xué),2009.
[5]周波.地面移動(dòng)機(jī)器人自主環(huán)境建模與適應(yīng)控制方法研究[D].沈陽(yáng):中國(guó)科學(xué)院沈陽(yáng)自動(dòng)化研究所,2008.
[6]Le A T, Rye D C, Hugh F, etc.Estimation of track-soi1 interactions for autonomous tracked vehicles[C].International Conference on Robotics and Automation,New Mexico,1997:1388-1393.
[7]Shiller Z,Serate W,Hua M.Trajectory planning of tracked vehicles[C].Proceedings of IEEE International Conference on Robotics and Automation.Atlanta,GA:IEEE Press,l993:796-801.
[8]H.Shibly,K.Iagnemma,S.Dubowsky.An equivalent soil mechanics formulation for rigid wheels in deformable terrain,with application to planetary exploration rovers[J].Journal of Terramechanics,2005,(42):1-13.
[9]Bekker M G.Introduction to terrain-vehicle systems[M].University of Michigan Press,Ann habor,1969.
[10]莊繼德.計(jì)算汽車(chē)地面力學(xué)[M].北京:機(jī)械工業(yè)出版社, 2002.
[11]周波,戴先中,韓建達(dá).野外移動(dòng)機(jī)器人滑動(dòng)效應(yīng)的在線建模和跟蹤控制[J].機(jī)器人,2011,33(5):265-275.
基金項(xiàng)目:
1.湖南省自然科學(xué)科教聯(lián)合項(xiàng)目(2020JJ7005)
2.復(fù)雜環(huán)境特種機(jī)器人控制技術(shù)與裝備湖南省工程研究中心專(zhuān)項(xiàng)(Lgy18gz004)
