復(fù)雜煤層條件下采煤機自適應(yīng)截割控制策略
2022-02-25 08:40:38趙麗娟王雅東張美晨劉宏梅
煤炭學(xué)報 2022年1期
趙麗娟,王雅東,張美晨,金 鑫,劉宏梅
(1.遼寧工程技術(shù)大學(xué) 機械工程學(xué)院,遼寧 阜新 123000;2.遼寧省大型工礦裝備重點實驗室,遼寧 阜新 123000)
我國90%的煤炭采用井工開采,其中復(fù)雜煤層的賦存量占總煤炭儲量的20%。采掘裝備智能化程度不高,導(dǎo)致我國煤礦開采災(zāi)害多、煤機適應(yīng)性不強、故障率高、效率低,提高煤機裝備的可靠性與適應(yīng)性是煤礦智能化發(fā)展的主要任務(wù)之一。采煤機是綜采工作面的核心裝備,當(dāng)采煤工作面可能存在夾矸層、硫化鐵硬結(jié)核、斷層、褶皺等復(fù)雜煤層條件時,其工況惡劣、環(huán)境復(fù)雜,被開采煤層的賦存條件、采煤機運動學(xué)參數(shù)、動力傳遞系統(tǒng)漸變的特征及其與煤巖相互作用關(guān)系等都會直接或間接影響采煤機截割煤巖的動態(tài)過程。將煤巖截割狀態(tài)信息獲取、處理、識別等異構(gòu)數(shù)據(jù)進行多領(lǐng)域融合,研究煤巖截割狀態(tài)與機-電-液-控一體化的采煤機動力傳遞系統(tǒng)導(dǎo)控機制,實現(xiàn)煤巖截割狀態(tài)的實時感知、精準(zhǔn)判別與決策控制,可有效提高采煤機對復(fù)雜煤層的適應(yīng)性,是實現(xiàn)綜采工作面智能化無人開采必要的基礎(chǔ)保障。國內(nèi)外諸多學(xué)者對采煤機高效截割及自適應(yīng)控制問題開展了研究,文獻[3]提出了滾筒的設(shè)計、轉(zhuǎn)速以及牽引速度和機身定位對截齒所受動態(tài)載荷的影響;文獻[4]對不同形狀截齒在恒速下截割煤壁的過程進行了數(shù)值模擬,研究煤巖截割特性;文獻[5-6]通過分析截割軸轉(zhuǎn)矩來反映不同的截割性能,從而對截割負載進行測量;文獻[7]針對煤巖截割阻抗變化對采煤機運動參數(shù)進行優(yōu)化,根據(jù)截割電機定子電流特征值實現(xiàn)煤層截割阻抗范圍的識別,并提出了采煤機電機調(diào)速控制方法;文獻[8]利用Matlab/Simulink建立了基于最佳運動參數(shù)匹配的采煤機調(diào)速系統(tǒng),采用矢量控制實現(xiàn)了牽引速度與滾筒轉(zhuǎn)速對推薦速度的快速、準(zhǔn)確跟蹤;文獻[9]提出了基于截割路徑跟蹤和運行狀態(tài)評價的采煤機控制方法,以牽引速度調(diào)節(jié)和滾筒截割高度調(diào)節(jié)作為主要及次要控制手段,實現(xiàn)了采煤機穩(wěn)定、可靠運行的控制;文獻[10]提出了截割路徑的記憶策略,以電機電流為輸入量,使用小波分解得到特征向量,利用BP神經(jīng)網(wǎng)絡(luò)對煤巖截割狀態(tài)進行識別,結(jié)合截割危險系數(shù),獲得采煤機自適應(yīng)修正控制策略,提升了整機的高效性與安全性;文獻[11]通過降低滾筒截割速度、增加截割深度,獲得較高的采煤生產(chǎn)率,降低截割粉塵;文獻[12]根據(jù)截割電機的轉(zhuǎn)速和電流,運用ELM神經(jīng)網(wǎng)絡(luò)軟測量方法實現(xiàn)了對截割載荷的預(yù)測,為采煤機高效截割控制奠定基礎(chǔ);文獻[13]提出基于BP神經(jīng)網(wǎng)絡(luò)實現(xiàn)路徑記憶、跟蹤和自適應(yīng)控制3個階段的調(diào)控策略,并基于仿真驗證了牽引調(diào)速-滾筒調(diào)高協(xié)同控制的可行性;文獻[14]利用震波CT煤層地質(zhì)探測技術(shù)構(gòu)建精細化三維GIS煤層地理信息系統(tǒng),并在此基礎(chǔ)上開發(fā)了采煤機自適應(yīng)截割技術(shù),實現(xiàn)采煤機自動調(diào)高和截割路徑自動規(guī)劃;目前采煤工作面大多僅通過調(diào)節(jié)采煤機牽引速度實現(xiàn)其自適應(yīng)截割,但該現(xiàn)狀已嚴(yán)重影響采煤機綜合性能的發(fā)揮,制約著復(fù)雜煤層智能綜采的實現(xiàn)和煤炭工業(yè)高質(zhì)量發(fā)展。近年來,采用變頻調(diào)速技術(shù)實現(xiàn)轉(zhuǎn)筒轉(zhuǎn)速可調(diào)的技術(shù)需求與研究方法的提出,為采煤機牽引速度與滾筒轉(zhuǎn)速聯(lián)合調(diào)控的實現(xiàn)奠定了基礎(chǔ)。
復(fù)雜煤層賦存條件下,采煤機螺旋滾筒截割煤巖時的動態(tài)過程極其復(fù)雜。以往的煤巖截割研究中大多忽略了采煤機螺旋滾筒與煤巖體間的雙向耦合作用,所構(gòu)建的理論分析模型通常偏離工程實際;在對采煤機控制系統(tǒng)研究中,大多基于Simulink建立采煤機控制系統(tǒng)模型,并以理想值作為輸入信號模擬不同煤巖截割阻抗值,得到的仿真結(jié)果過于理想,相比于實際煤巖截割獲得的研究結(jié)果有所出入;在特定煤層賦存條件下采煤機的工作性能取決于其運動學(xué)參數(shù)的合理匹配及滾筒高度的最優(yōu)控制,而現(xiàn)階段對采煤機牽引速度、滾筒轉(zhuǎn)速及高度聯(lián)合調(diào)控的研究比較薄弱。實驗室試驗法雖然在一定程度上能夠提高模擬煤巖截割過程的真實性,但試驗臺的搭建耗時長,試驗樣機一旦確定,其結(jié)構(gòu)難以改變,且所搭建煤巖試樣的多樣性亦受限制,很難實現(xiàn)對其應(yīng)用的普適性研究。
筆者基于虛擬樣機技術(shù)、模糊控制技術(shù),結(jié)合數(shù)據(jù)自適應(yīng)加權(quán)融合算法、深度強化學(xué)習(xí)算法,采用多領(lǐng)域建模與協(xié)同仿真方法,構(gòu)建機-電-液-控一體化的采煤機自適應(yīng)截割控制系統(tǒng),研究復(fù)雜煤層條件下煤巖截割狀態(tài)與采煤機動力傳遞系統(tǒng)導(dǎo)控機制,實現(xiàn)煤巖截割狀態(tài)的實時感知、精準(zhǔn)判別與決策控制,以提高采煤機對復(fù)雜煤層的適應(yīng)性和動態(tài)可靠性,促進煤礦智能化的發(fā)展進程。
1 采煤機自適應(yīng)截割系統(tǒng)架構(gòu)
以采煤機自適應(yīng)截割為主要研究內(nèi)容,制定其控制策略的技術(shù)路線(圖1,其中,分別為采煤機牽引速度和滾筒轉(zhuǎn)速),以此搭建采煤機自適應(yīng)截割控制系統(tǒng)。
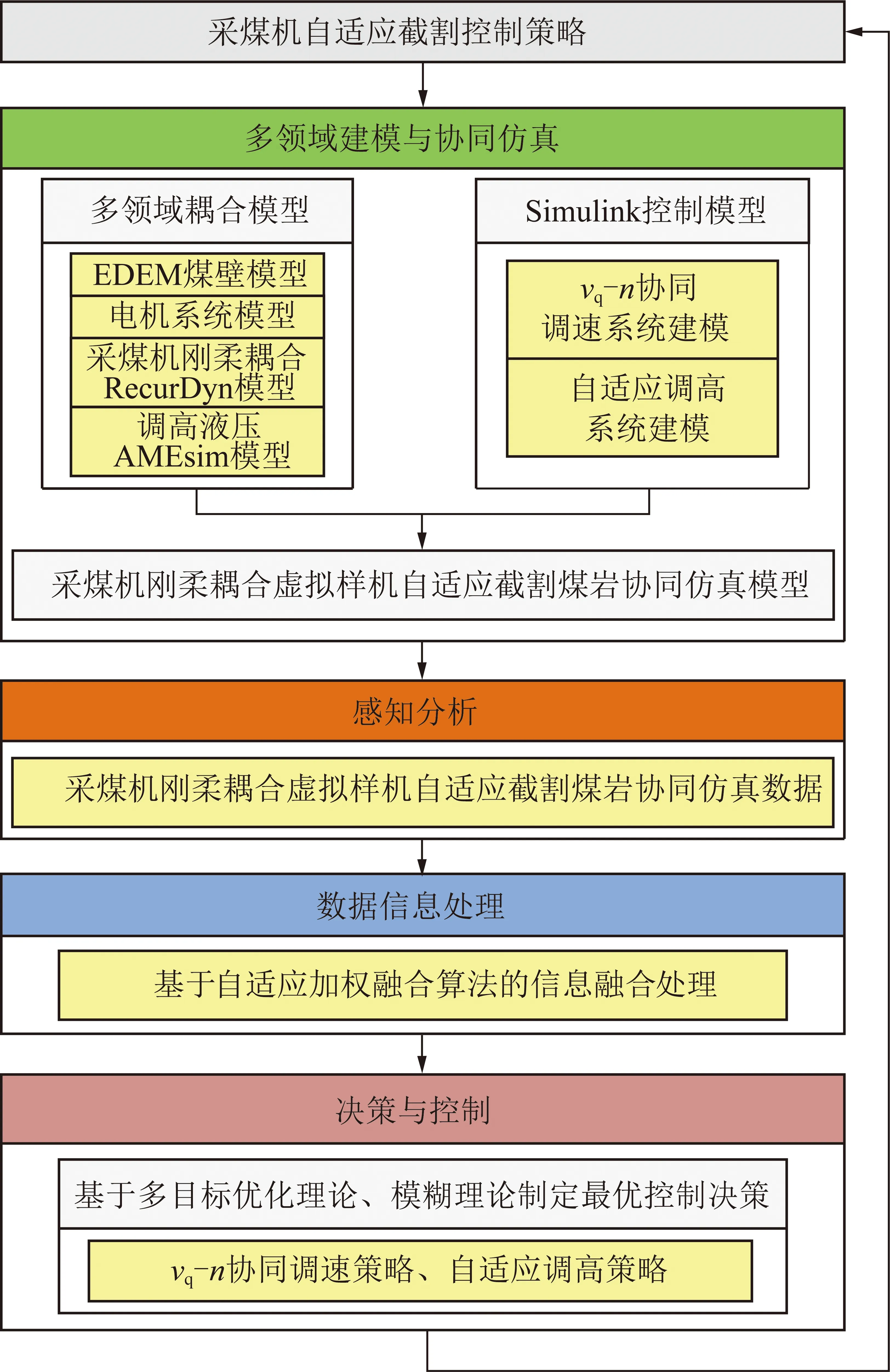
圖1 采煤機自適應(yīng)截割控制策略技術(shù)路線Fig.1 Technical route ofstudy on self-adaptive cutting control strategy of shearer
基于EDEM建立復(fù)雜煤層離散元煤壁模型,利用RecurDyn建立采煤機剛?cè)狁詈蟿恿W(xué)仿真模型,并基于接口技術(shù)(DEM-MFBD)構(gòu)建EDEM-RecurDyn剛?cè)狁詈喜擅簷C截割煤巖雙向耦合機械系統(tǒng)模型,基于AMEsim建立液壓調(diào)高系統(tǒng)模型,并與EDEM-RecurDyn雙向耦合仿真模型集成;基于Simulink建立-協(xié)同調(diào)速、自適應(yīng)調(diào)高控制系統(tǒng)模型和電機系統(tǒng)模型;基于軟件間接口實現(xiàn)EDEM-RecurDyn-AMEsim-Simulink的耦合,搭建采煤機自適應(yīng)截割控制系統(tǒng)并進行仿真;以協(xié)同仿真特征信號數(shù)據(jù)流為主線,實現(xiàn)對采煤機截割煤巖動態(tài)過程的感知,并利用數(shù)據(jù)自適應(yīng)加權(quán)融合算法對特征信號融合處理,基于特征參數(shù)融合值,利用模糊控制器實現(xiàn)煤巖截割狀態(tài)識別。以采煤機綜合性能最優(yōu)為目標(biāo),并根據(jù)截割狀態(tài)識別結(jié)果及改進的MOGWO獲取-協(xié)同調(diào)速和自適應(yīng)調(diào)高的最優(yōu)參數(shù)組合,將控制指令傳輸至Simulink控制系統(tǒng)作為決策目標(biāo)值的輸入,實現(xiàn)對EDEM-RecurDyn-AMEsim耦合仿真模型的自適應(yīng)控制,基于物理試驗驗證控制策略的可行性與準(zhǔn)確性。
2 采煤機自適應(yīng)截割控制系統(tǒng)多領(lǐng)域建模
采煤機截割煤巖是一個復(fù)雜的動態(tài)過程,應(yīng)充分發(fā)揮不同領(lǐng)域仿真軟件的優(yōu)勢,搭建精度高、便于信息傳遞的協(xié)同仿真模型。
2.1 采煤機自適應(yīng)截割機-液系統(tǒng)模型構(gòu)建
以MG2×55/250-BWD型薄煤層采煤機為工程對象,基于Pro/E建立其各零部件三維實體模型并進行虛擬裝配后導(dǎo)入RecurDyn中,添加零部件間的約束,并對直接參與截割的螺旋滾筒進行柔性化處理,最終建立RecurDyn環(huán)境下的采煤機剛?cè)狁詈蟿恿W(xué)仿真模型,如圖2所示。
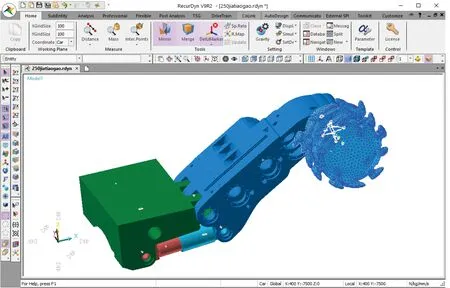
圖2 采煤機剛?cè)狁詈蟿恿W(xué)仿真模型Fig.2 Rigid-flexible coupling dynamics simulation model of shearer
結(jié)合文獻[18]采煤機自適應(yīng)液壓調(diào)高控制系統(tǒng)的各組成部分,基于AMEsim環(huán)境建立采煤機調(diào)高液壓系統(tǒng)模型,如圖3所示。圖3中3條紅色虛線分別為AMEsim模型的2個輸入端及1個輸出端,將調(diào)高液壓缸的活塞位移定義為輸出,由AMEsim 輸入到 Simulink中;將調(diào)高油缸作用力′作為輸入作用到AMEsim中的液壓缸活塞上,另一個輸入為實現(xiàn)調(diào)高液壓系統(tǒng)自適應(yīng)調(diào)整的電壓信號,其控制閥口開關(guān)及開口大小,供給調(diào)高油缸穩(wěn)定的流量,并推動油缸活塞移動,實現(xiàn)搖臂及滾筒升降。
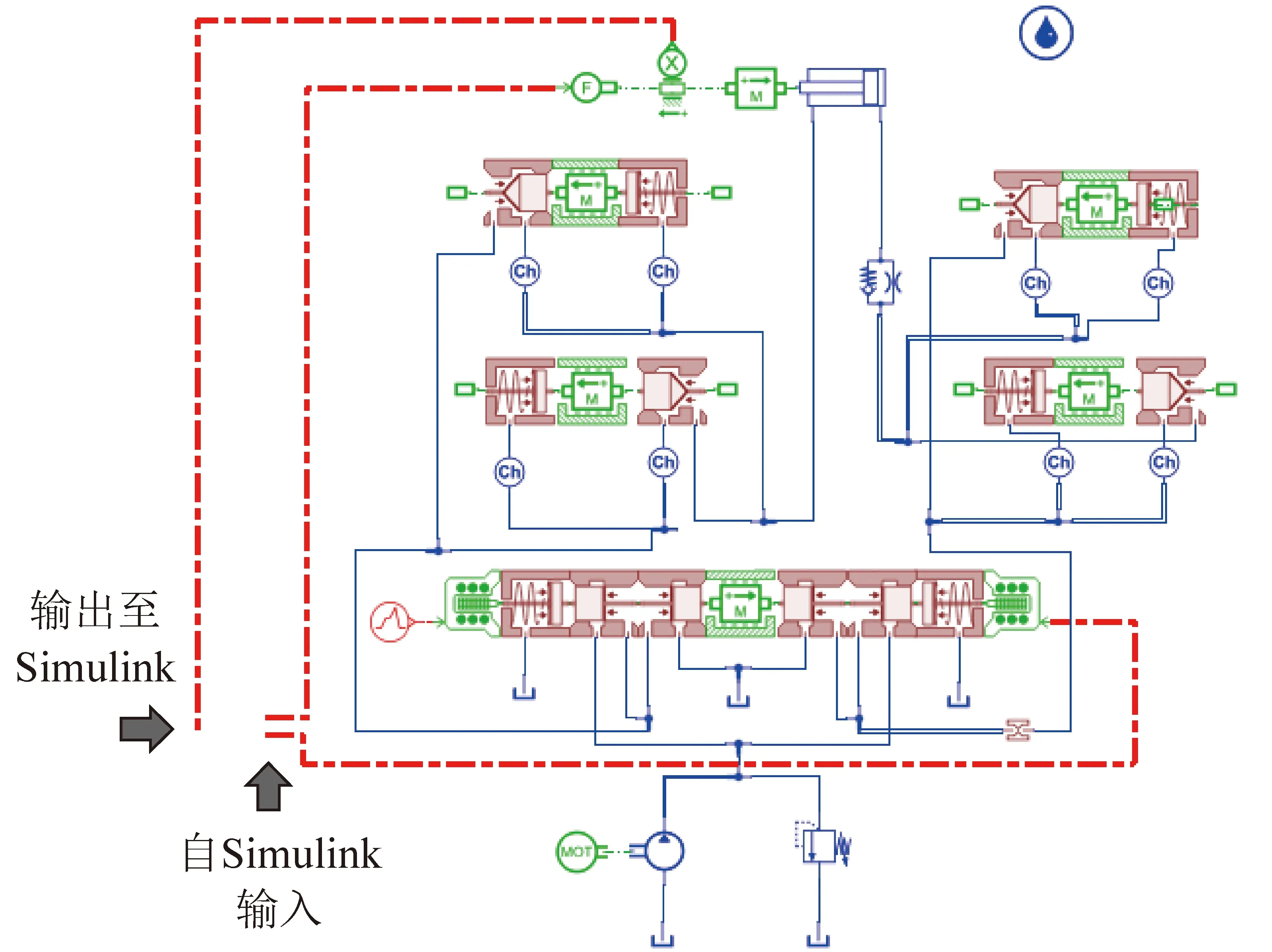
圖3 采煤機電液比例調(diào)高液壓系統(tǒng)AMEsim模型Fig.3 AMEsim model of the hydraulic system of the shearer electro-hydraulic proportional height adjustment
2.2 EDEM煤壁模型構(gòu)建
為使所構(gòu)建的EDEM煤壁模型能較真實地模擬實際煤壁,以兗州煤業(yè)集團楊村煤礦4602工作面地質(zhì)條件為依據(jù),該煤層賦含硫化鐵硬結(jié)核和多種類型夾矸,主要類型為鋁質(zhì)煤巖、灰色煤巖、砂質(zhì)巖,夾矸層厚度在51~246 mm,平均厚度為198 mm,位置大多處于煤層中部,頂板為石灰?guī)r,由于受煤層滑移的影響,滾筒存在截割頂板情況。研究發(fā)現(xiàn),可將硫化鐵硬結(jié)核視為夾矸的一種特殊存在形式。將含夾矸煤層采用等級劃分法對煤巖體按堅固性系數(shù)進行劃分(圖4),分為Ⅰ~Ⅵ 6個等級,以沙子、水泥、石膏、白灰和水為原料,以模擬煤巖試樣堅固性系數(shù)為指標(biāo),通過改變5種原料的配比,使試樣的力學(xué)性能發(fā)生改變,以模擬堅固性系數(shù)為6個等級區(qū)間節(jié)點的含夾矸煤巖,部分試樣如圖5所示。按測試標(biāo)準(zhǔn)對含夾矸煤巖進行單軸壓縮物理力學(xué)性能測試(表1)。利用離散元法建立煤壁模型時,煤壁的整體物理力學(xué)特性與煤巖顆粒間黏結(jié)力學(xué)參數(shù)相關(guān),利用單軸壓縮等力學(xué)特性試驗進行離散元模擬仿真能夠建立顆粒黏結(jié)力學(xué)參數(shù)與物理力學(xué)特性之間的映射關(guān)系,實現(xiàn)顆粒間黏結(jié)力學(xué)參數(shù)的標(biāo)定,使得所建煤壁模型與真實含夾矸煤層力學(xué)性能具有一致性,煤巖試樣單軸壓縮仿真破壞過程和部分顆粒間黏結(jié)力學(xué)參數(shù)標(biāo)定結(jié)果如圖6、表2所示。
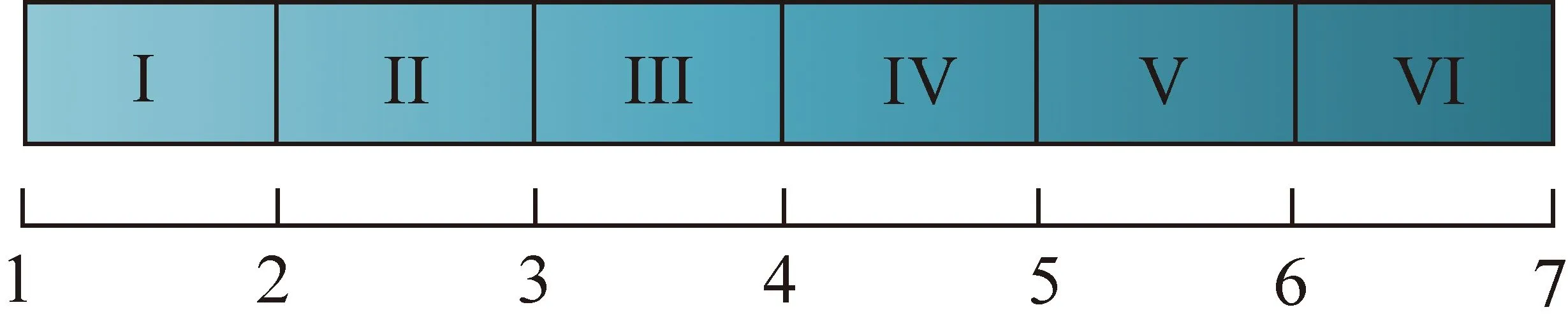
圖4 煤巖體按堅固性系數(shù)等級劃分Fig.4 Classification of the firmness coefficient of coal and rock

圖5 模擬煤巖試樣Fig.5 Simulated coal and rock model
煤巖顆粒之間選用Hertz-Mindlin with bonding模型,基于單軸壓縮仿真試驗標(biāo)定的煤巖顆粒間黏結(jié)參數(shù),使用半徑為12 mm的顆粒建立煤壁模型,如圖7所示;賦含夾矸層、硫化鐵硬結(jié)核、斷層、頂板滑移的煤壁模型可參見文獻[21-22]。
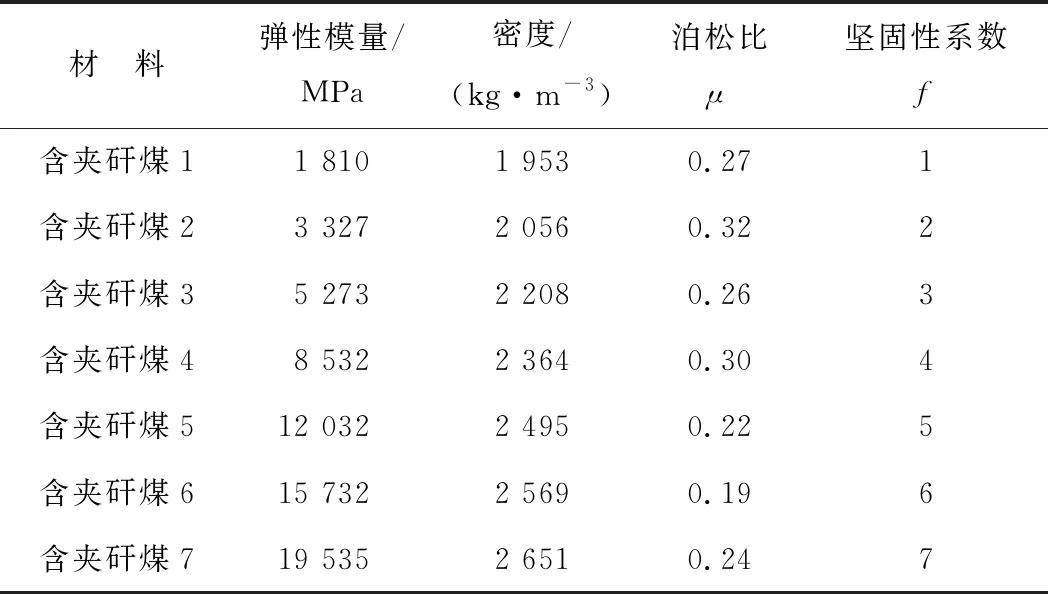
表1 模擬煤巖試樣力學(xué)性能參數(shù)
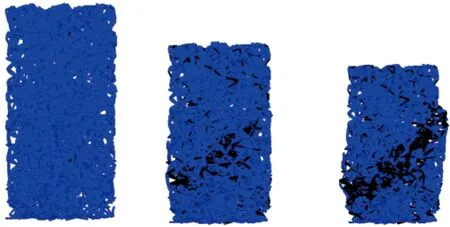
圖6 煤巖試樣單軸壓縮破壞過程Fig.6 Failure of coal and rock under uniaxial compression
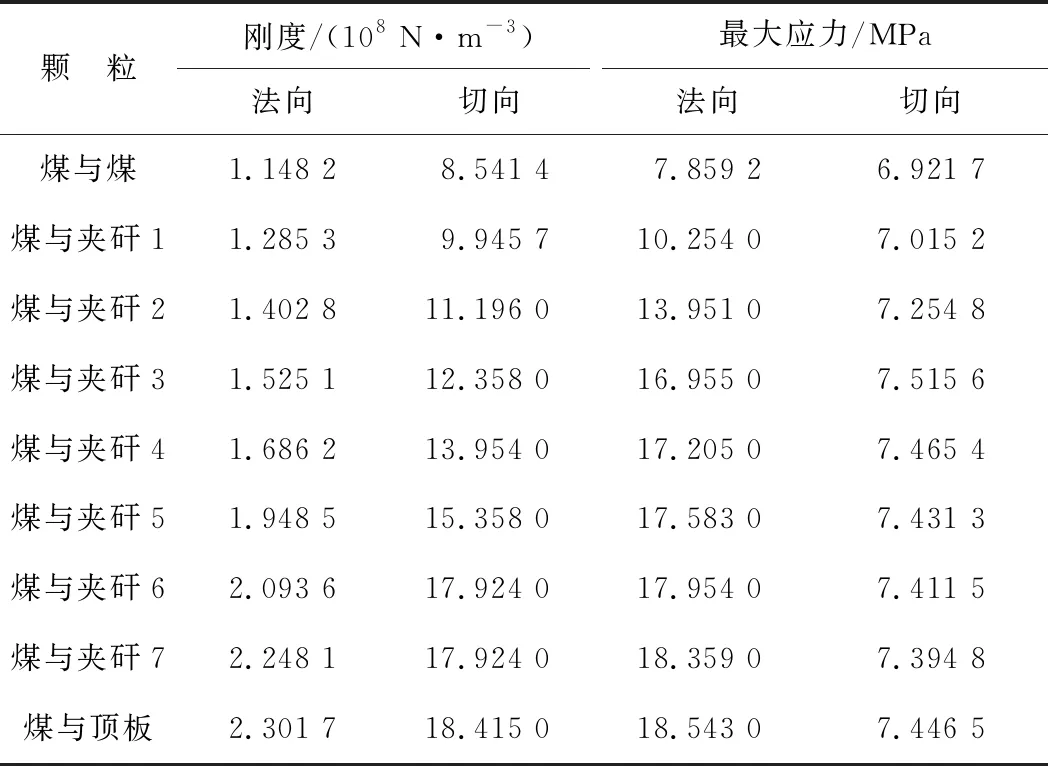
表2 顆粒間黏結(jié)力學(xué)參數(shù)
2.3 采煤機剛?cè)狁詈咸摂M樣機截割煤壁雙向耦合模型構(gòu)建
煤巖截割、破碎是多因素耦合作用的結(jié)果。工作機構(gòu)的幾何參數(shù)、采煤機運動學(xué)參數(shù)以及漸變的特征、被截割煤巖的賦存條件、螺旋滾筒與煤巖相互作用關(guān)系等都會直接或間接地影響采煤機的截割破碎過程及其動力學(xué)特性,采用DEM-MFBD雙向耦合機制,基于EDEM和RecurDyn的接口構(gòu)建采煤機剛?cè)狁詈咸摂M樣機截割各向異性復(fù)雜離散元煤壁雙向耦合模型,耦合計算原理如圖8所示。

圖7 含夾矸離散元煤壁模型Fig.7 Discrete coal wall model with gangue
EDEM-RecurDyn的雙向耦合是在EDEM每一個時間步內(nèi),RecurDyn將耦合零部件每個時間步內(nèi)的運動參數(shù)傳遞給EDEM中相應(yīng)的耦合零部件,在EDEM中重新計算耦合零部件位置變動對于顆粒的影響,包括受力、運動參數(shù)等;EDEM根據(jù)離散元理論,計算出顆粒作用在耦合部件的力及力矩并將其傳遞給RecurDyn;RecurDyn根據(jù)多體動力學(xué)理論重新計算耦合部件的動力學(xué)參數(shù),至此完成了一個時間步內(nèi)的雙向耦合,如此循環(huán)。
螺旋滾筒是采煤機的工作機構(gòu),為在不影響聯(lián)合仿真結(jié)果的前提下縮短仿真時間,利用RecurDyn中“External SPI”菜單下的“Walls”將螺旋滾筒以.wall文件形式導(dǎo)出,利用EDEM環(huán)境下的“Import Geometry from RecurDyn”命令導(dǎo)入生成的螺旋滾筒.wall文件,仿真步長設(shè)置為Rayleigh時間步長的15%~25%,進入仿真界面開啟耦合按鈕,至此,完成EDEM-RecurDyn耦合仿真相關(guān)操作,EDEM-RecurDyn耦合仿真界面如圖9所示,以采煤機前滾筒截割復(fù)雜煤壁狀態(tài)為研究對象,其截割仿真狀態(tài)如圖10所示。

圖8 EDEM-RecurDyn耦合計算原理Fig.8 EDEM-RecurDyn coupling calculation principle
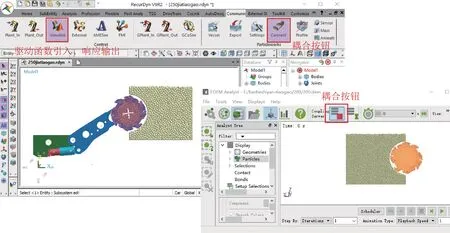
圖9 EDEM-RecurDyn耦合仿真界面Fig.9 EDEM-RecurDyn coupling simulation interface
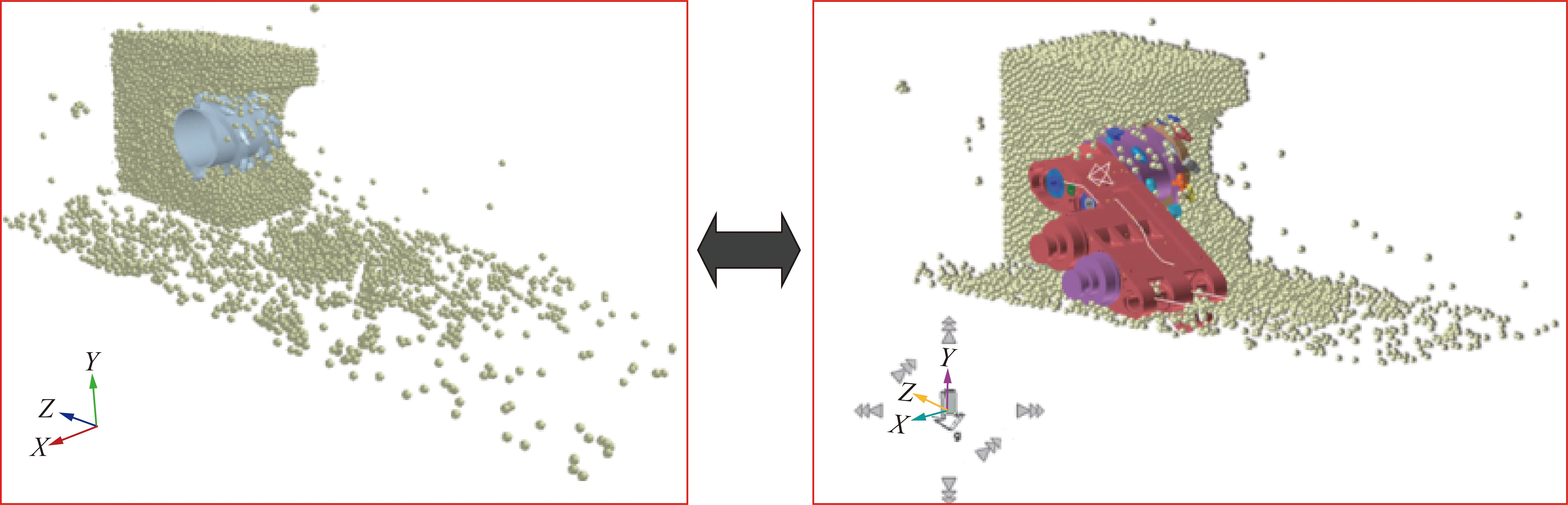
圖10 EDEM-RecurDyn雙向耦合仿真狀態(tài)Fig.10 State picture of EDEM-RecurDyn bi-directional coupling simulation
2.4 雙向耦合仿真可行性驗證
基于EDEM-RecurDyn雙向耦合仿真獲取的特征信息與煤巖截割物理試驗獲得的特征信息吻合程度,決定了基于該方法研究采煤機自適應(yīng)截割控制的理論意義和工程應(yīng)用價值,據(jù)此通過采煤機綜合試驗臺對基于EDEM-RecurDyn雙向耦合仿真的可行性與結(jié)果準(zhǔn)確性進行試驗驗證。
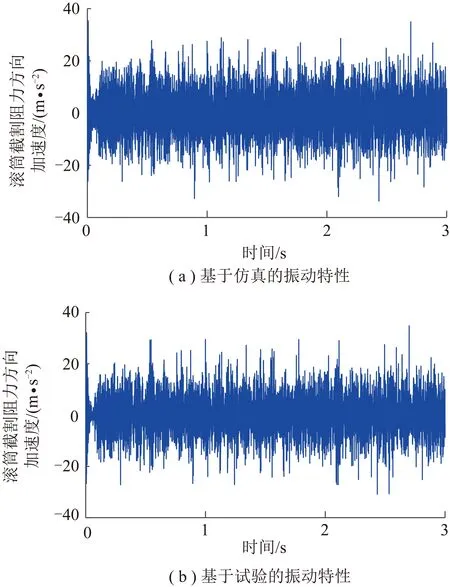
圖11 基于仿真和試驗的滾筒振動特性Fig.11 Drum vibration characteristics based on simulation and experiment
基于相似理論搭建與圖7的EDEM煤壁模型相一致的試驗煤壁模型,以采煤機牽引速度為4 m/min、螺旋滾筒轉(zhuǎn)速為90 r/min進行模擬仿真與試驗截割,并以截割過程中螺旋滾筒截割阻力方向振動特性為驗證指標(biāo),獲取2者時域信號結(jié)果如圖11所示,振動特性特征值統(tǒng)計結(jié)果見表3,其中振動特性的試驗值通過安裝于滾筒上的三向振動加速度傳感器獲得,傳感器裝置如圖12所示。
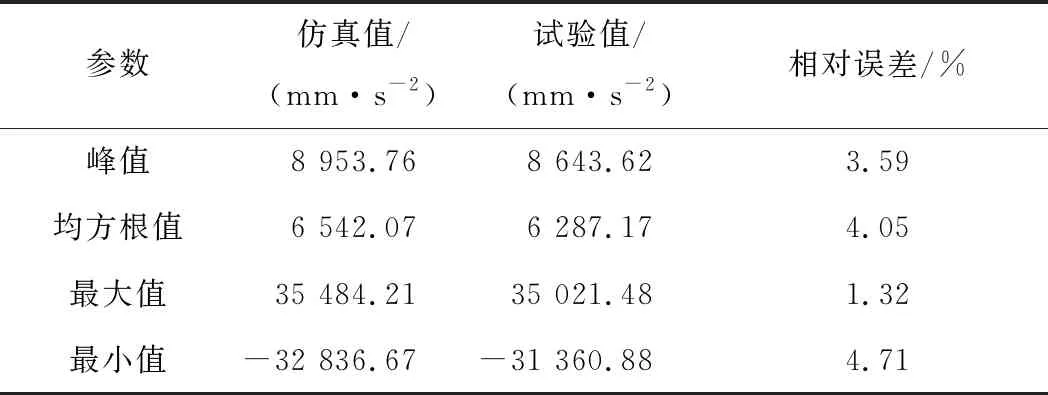
表3 滾筒振動特性特征值

圖12 振動加速度傳感器及其布置Fig.12 vibration acceleration sensor and its arrangement
對比分析圖11中滾筒振動特性曲線及表3滾筒振動特性特征值可知:2者的滾筒振動特性波形呈高度一致性,僅在振動幅度上仿真值略大于試驗值,滾筒振動特性特征值的最大相對誤差僅為4.71%,處于合理范圍內(nèi),綜上,驗證了基于EDEM-RecurDyn雙向耦合仿真的可行性與結(jié)果的可靠性。
3 采煤機自適應(yīng)截割最優(yōu)決策與控制
3.1 基于改進的MOGWO算法的最優(yōu)決策方案
最優(yōu)決策方案的選擇依賴于采煤機的截割狀態(tài)及其綜合性能指標(biāo)。不同煤層賦存條件下使采煤機綜合性能指標(biāo)達到最優(yōu)的運動學(xué)參數(shù)組合的獲取至關(guān)重要,通過選取圖4各等級區(qū)間中點對應(yīng)的煤巖堅固性系數(shù)及=9(視為“堅硬煤巖層或硬結(jié)核”)對采煤機牽引速度和滾筒轉(zhuǎn)速進行優(yōu)化,假定當(dāng)識別到煤巖堅固性系數(shù)>7時,首先考略滾筒可能截割煤層頂板,為保證采煤機具有最優(yōu)性能及其關(guān)鍵零部件安全可靠運行,需結(jié)合自適應(yīng)調(diào)高策略避開頂板,以滾筒調(diào)高過程中其振動特性波動情況判斷其是否處于截頂狀態(tài),反之判定為截割堅硬煤巖層或硬結(jié)核狀態(tài),將僅通過-協(xié)同調(diào)速實現(xiàn)自適應(yīng)截割。以獲取采煤機綜合性能最優(yōu)為目標(biāo),基于改進的MOGWO算法尋求采煤機最優(yōu)運動學(xué)參數(shù)組合。根據(jù)煤巖體堅固性系數(shù)等級劃分范圍,建立采煤機不同和下煤巖體堅固性系數(shù)分別為1.5,2.5,3.5,4.5,5.5,6.5和9.0時采煤機各項性能指標(biāo)的評價模型,并以=45工況為例進行說明。
..多目標(biāo)優(yōu)化模型構(gòu)建
采煤機綜合性能指標(biāo)包括切削面積、生產(chǎn)率、裝煤率、截割比能耗、截割阻力和載荷波動系數(shù)等,利用采煤機滾筒輔助設(shè)計及載荷計算軟件分別建立其性能指標(biāo)評價模型。
切削面積(,mm)評價模型:

(1)
生產(chǎn)率(,t/h)評價模型:
()=5061
(2)
裝煤率(,%)評價模型:

(3)
截割比能耗(,kW·h/m)評價模型:

(4)
截割阻力(,N)評價模型:

(5)
載荷波動系數(shù)(,無量綱)評價模型:

(6)
選取采煤機和為設(shè)計變量,則
=(,)=(,)
(7)
以切削面積、生產(chǎn)率和裝煤率最大,截割比能耗、截割阻力和載荷波動系數(shù)最小為目標(biāo),考慮工程實際中采煤機運動學(xué)參數(shù)(和)的取值范圍、截割功率及裝煤能力的約束構(gòu)建多目標(biāo)優(yōu)化模型(式(8))。
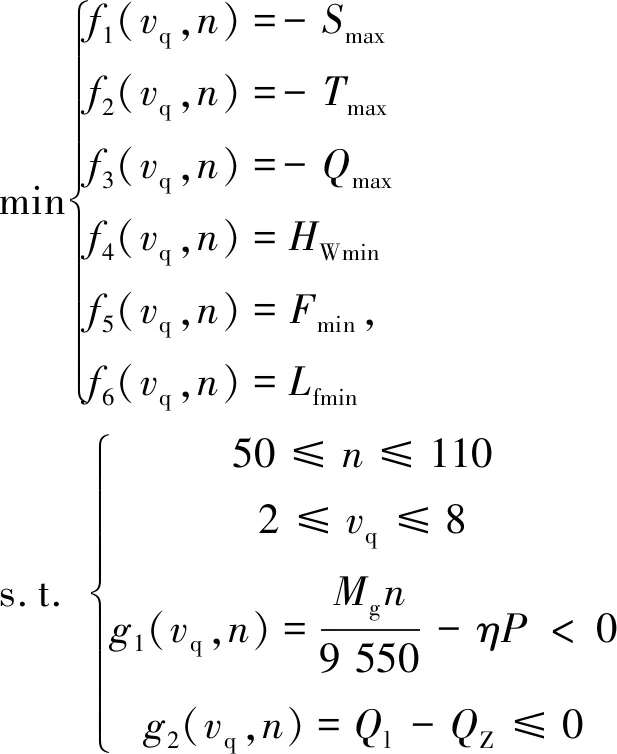
(8)
式中,為螺旋滾筒總力矩,N·m;為機械效率;為電機額定功率,kW;,分別為理論落煤量和理論裝煤量,t/h。
..最優(yōu)運動學(xué)參數(shù)組合求解
MOGWO作為智能優(yōu)化算法,其設(shè)計理念是根據(jù)灰狼種群等級制度劃分情況及狩獵行為,并以數(shù)學(xué)表達式的形式對其進行表達。首先在搜索空間內(nèi)依據(jù)等級制度隨機產(chǎn)生具有特定比例的一群灰狼,分別將α-灰狼、β-灰狼和δ-灰狼視為最優(yōu)解、次優(yōu)解和第三最優(yōu)解,ω-灰狼視為候選解,然后由α-灰狼、β-灰狼和δ-灰狼來負責(zé)估計獵物的位置,ω-灰狼則跟隨著α-灰狼、β-灰狼和δ-灰狼的位置不斷調(diào)整自己與獵物之間的位置,進而通過搜尋獵物、包圍獵物和攻擊獵物來完成獵物的捕獲(優(yōu)化),最終獲得一組Pareto最優(yōu)解。
為了提高MOGWO算法的全局搜索能力和優(yōu)化精度,采用佳點集初始化種群對MOGWO算法進行改進,圖13為利用隨機法和佳點集方法在二維搜索空間中生成所設(shè)定的初始種群個體分布示意。
對比分析圖13可見:基于隨機法生成的初始種群個體不能均勻遍歷整個搜索空間,分布的隨機性較強;而佳點集方法生成的初始種群個體在搜索空間內(nèi)分布均勻,豐富了初始種群個體的多樣性,為MOGWO算法的全局搜索奠定基礎(chǔ),改進的MOGWO算法流程如圖14所示。
結(jié)合改進的MOGWO算法流程設(shè)置基本參數(shù),初始化狼群規(guī)模=100,Archive種群規(guī)模=50,輪盤賭系數(shù)=2,最大迭代次數(shù)=1 000,進行多目標(biāo)優(yōu)化,得到50組Pareto最優(yōu)解(表4)。
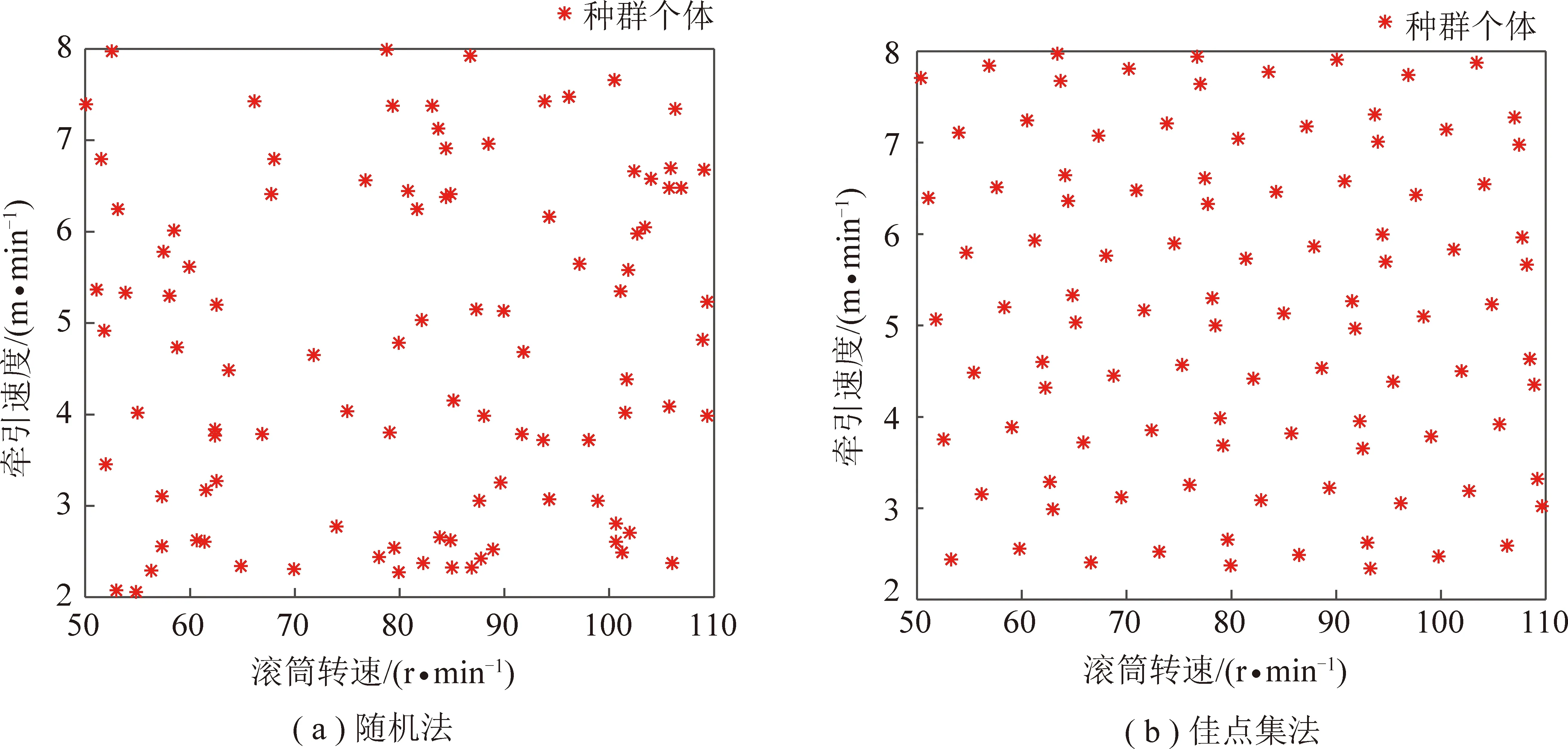
圖13 生成初始種群Fig.13 Generate initial population
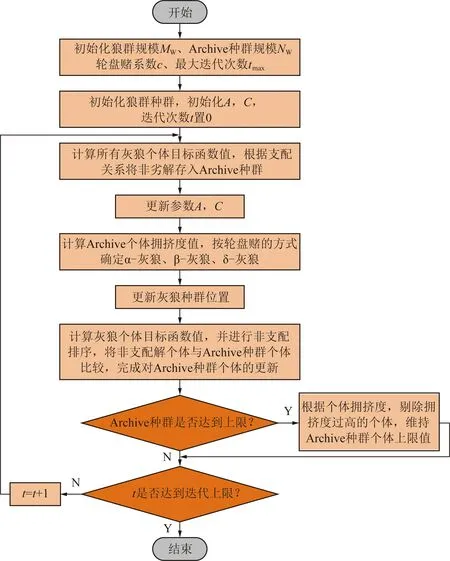
圖14 改進的MOGWO算法流程Fig.14 Improved MOGWO algorithm flow

表4 采煤機運動學(xué)參數(shù)最優(yōu)組合
基于TOPSIS法對得到的50組Pareto最優(yōu)解進行相對優(yōu)劣的評價,得到不同煤巖體堅固性系數(shù)等級下所對應(yīng)的一組最優(yōu)運動學(xué)參數(shù)組合。同理,計算其他5組煤巖堅固性系數(shù)等級及=9條件下的最優(yōu)運動學(xué)參數(shù),最終得到采煤機截割不同堅固性系數(shù)等級煤巖時的最優(yōu)牽引速度和滾筒轉(zhuǎn)速見表5。
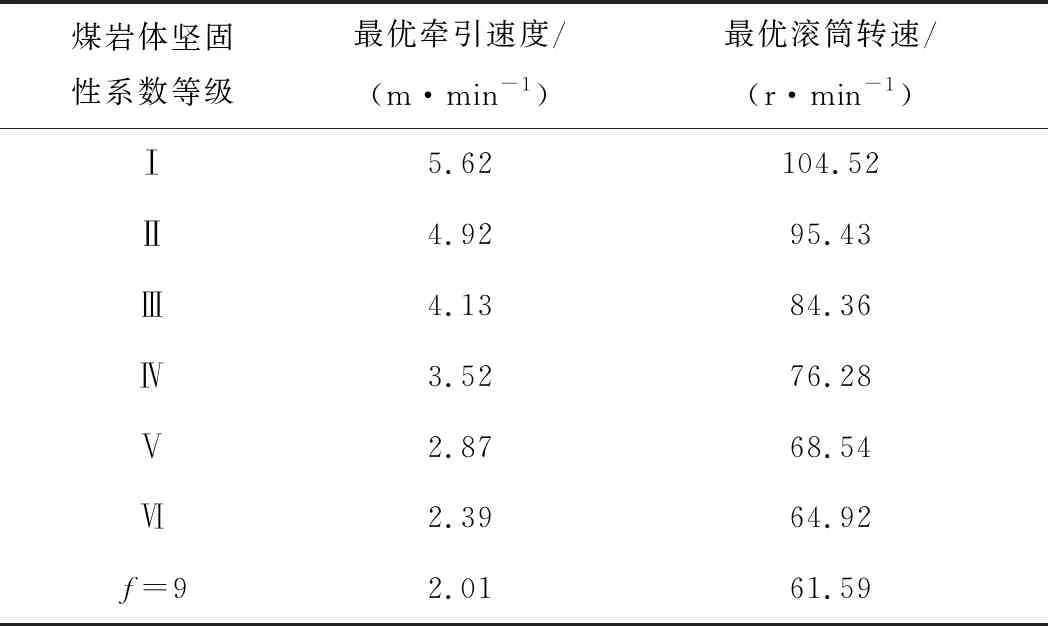
表5 不同等級煤巖堅固性系數(shù)下最優(yōu)牽引速度和滾筒轉(zhuǎn)速
..算法性能對比驗證分析
為驗證改進的MOGWO算法的性能,同時選取未改進的MOGWO算法、NSGA-Ⅱ算法進行多目標(biāo)優(yōu)化,其中未改進的MOGWO算法的參數(shù)設(shè)置按3.1.2節(jié)選取,NSGA-Ⅱ算法種群規(guī)模為50,進化代數(shù)為1 000,交叉概率為0.1,變異概率為0.2,以所獲得的Pareto解分布情況作為性能評價指標(biāo)進行對比分析,結(jié)果如圖15所示。

圖15 不同優(yōu)化算法對應(yīng)的 Pareto圖Fig.15 Pareto chart corresponding to the different optimization algorithm
由圖15可見,經(jīng)3種算法優(yōu)化后Pareto最優(yōu)解的分布情況:NSGA-Ⅱ算法的Pareto最優(yōu)解覆蓋范圍較廣,但連續(xù)性較差,分布不均勻;未改進的MOGWO算法的Pareto最優(yōu)解分布的連續(xù)性較好,但因初始種群個體在搜索空間內(nèi)分布的隨機性較強,個體分布不能均勻遍歷整個搜索空間;而經(jīng)改進的MOGWO算法的Pareto最優(yōu)解比較均勻、多樣性較好,這是由于佳點集方法生成的初始種群個體在搜索空間內(nèi)分布均勻,豐富了初始種群個體的多樣性,其能為MOGWO算法的全局搜索奠定基礎(chǔ)。
3.2 基于模糊控制的煤巖截割狀態(tài)識別
..最優(yōu)運動學(xué)參數(shù)下煤巖截割狀態(tài)數(shù)據(jù)庫構(gòu)建
當(dāng)采煤機運動學(xué)參數(shù)一定時,煤巖體堅固性系數(shù)是影響采煤機螺旋滾筒及搖臂等部件振動特性的主要因素,采煤機截割部作為直接截割煤巖體和煤巖截割過程中變形及振動最劇烈的部件,能夠在一定程度上反映煤巖截割狀態(tài),運用數(shù)據(jù)自適應(yīng)加權(quán)LMS算法對采煤機螺旋滾筒及搖臂的時域振動信號進行融合處理,將采樣時間(3 s)內(nèi)2者的振動信號歸一化并融合為一個特征值,據(jù)此實現(xiàn)最優(yōu)運動學(xué)參數(shù)下煤巖截割狀態(tài)數(shù)據(jù)庫構(gòu)建。
以煤巖體堅固性系數(shù)范圍Ⅲ時采煤機最優(yōu)運動學(xué)參數(shù)(=4.13 m/min,=84.36 r/min)為例,采煤機以上述牽引速度和滾筒轉(zhuǎn)速截割各堅固性系數(shù)區(qū)間節(jié)點及=9(模擬頂板及堅硬煤巖)的離散元煤壁模型,采樣頻率為2 000 Hz,步長為0.001 5 s,受篇幅限制,僅列出截割堅固性系數(shù)=3煤巖體時螺旋滾筒及搖臂在截割阻力方向的振動加速度時域信號,如圖16所示,并僅對此工況下振動加速度時域信號的融合過程進行詳細敘述。
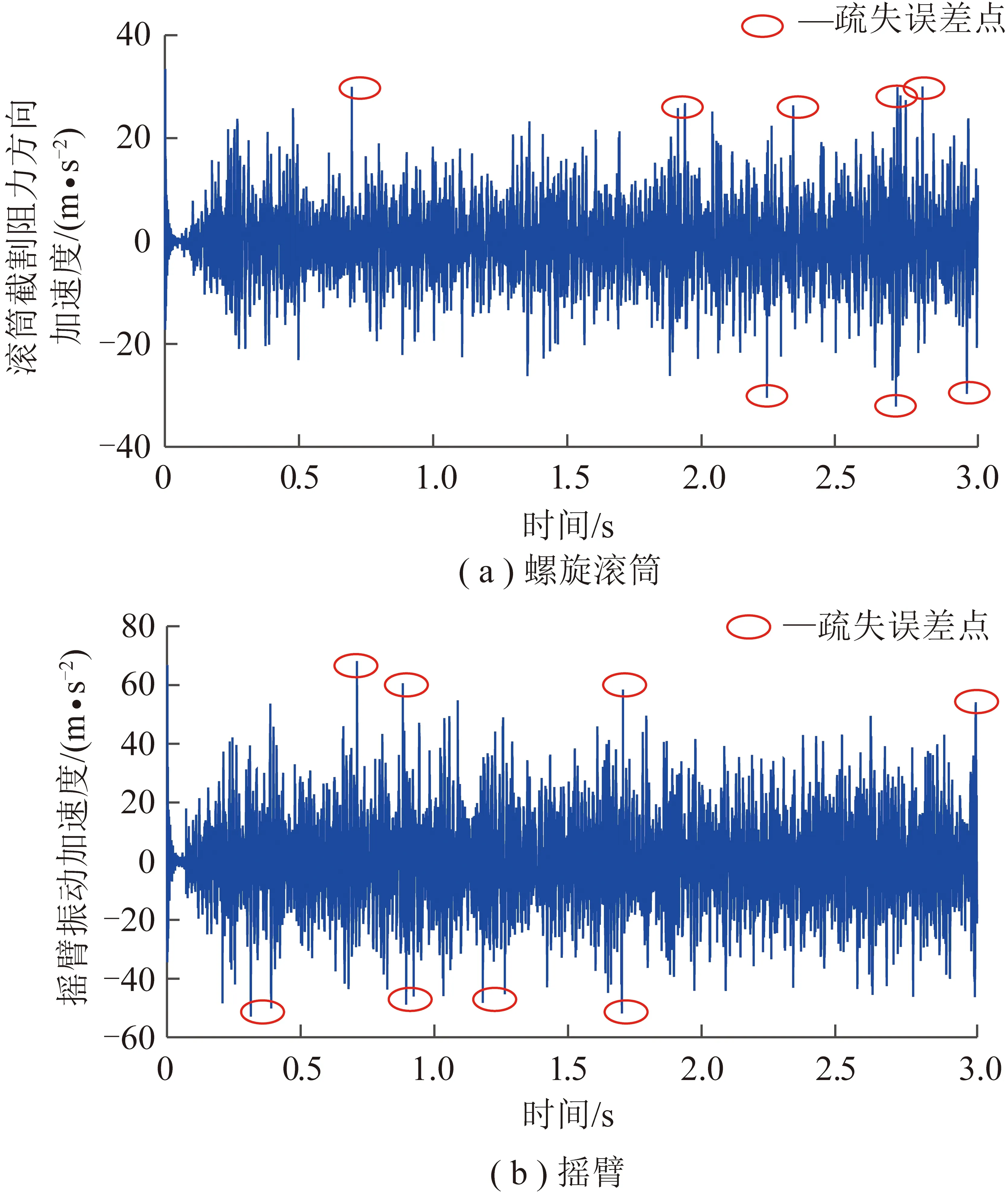
圖16 螺旋滾筒及搖臂振動加速度時域信號Fig.16 Time domain signal of vibration acceleration of spiral drum and rocker arm
由圖16可知,螺旋滾筒及搖臂的振動加速度時域信號中存在一些疏失誤差數(shù)據(jù)點,采用格羅貝斯判據(jù)對其予以剔除,同時為避免大數(shù)據(jù)掩蓋小數(shù)據(jù),按式(9)對信號進行歸一化處理。
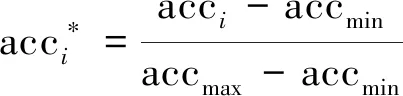
(9)

基于算術(shù)平均值與分批估計對剔除疏失誤差后的數(shù)據(jù)進行融合預(yù)處理,將螺旋滾筒及搖臂的振動加速度時域信號在采樣周期內(nèi)分為2個小組,融合過程如式(10)~(12)所示。
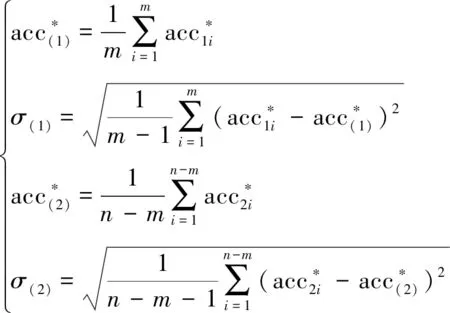
(10)

根據(jù)分批估計理論,計算振動加速度時域信號融合值的方差為
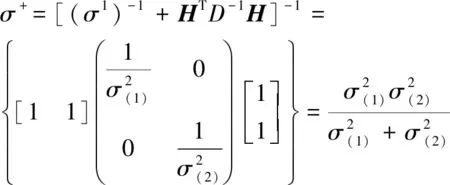
(11)
式中,為測量方程的系數(shù)矩陣;為測量噪音的協(xié)方差;=∞。
分組數(shù)據(jù)的融合預(yù)處理值為
(12)
分別計算螺旋滾筒及搖臂的振動加速度時域信號融合預(yù)處理值及方差,結(jié)果見表6。

表6 融合預(yù)處理后的數(shù)據(jù)
基于LMS 算法對經(jīng)過融合預(yù)處理的數(shù)據(jù)值以自適應(yīng)的方式融合處理,使融合后的數(shù)據(jù)總均方誤差最小,達到最優(yōu)融合的效果,自適應(yīng)加權(quán)融合計算如式(13)~(14)所示。
引入加權(quán)因子得到數(shù)據(jù)融合值acc為
(13)
式中,為加權(quán)因子;為待融合處理數(shù)據(jù)個數(shù),取=2。
總均方誤差為
(14)

同理,統(tǒng)計截割其余7種堅固性系數(shù)離散元煤壁模型的振動信號數(shù)據(jù)并計算得出其融合值,以此融合值為依據(jù),建立該運動學(xué)參數(shù)下的數(shù)據(jù)庫Data作為煤巖截割狀態(tài)識別的標(biāo)準(zhǔn)(表7)。
利用上述方法可得到,采煤機基于其他6種最優(yōu)運動學(xué)參數(shù)分別截割8個堅固性系數(shù)離散元煤壁模型時的螺旋滾筒及搖臂振動加速度時域信號融合值數(shù)據(jù)庫Data,Data,Data,Data,Data和Data。

表7 最優(yōu)運動學(xué)參數(shù)下螺旋滾筒及搖臂振動加速度時域信號融合值數(shù)據(jù)庫DataⅢ
..煤巖截割狀態(tài)模糊識別控制器設(shè)計
結(jié)合表7以振動信號數(shù)據(jù)融合值acc為輸入,值域為[0.1,0.9];以煤巖體堅固性系數(shù)范圍為輸出,值域為[1,9];設(shè)置論域數(shù)量為7,輸入輸出均選擇trapmf型隸屬度函數(shù),如圖17所示;模糊規(guī)則見表8;建立單輸入單輸出模糊識別控制器C,同理建立C,C,C,C,C及C控制器。
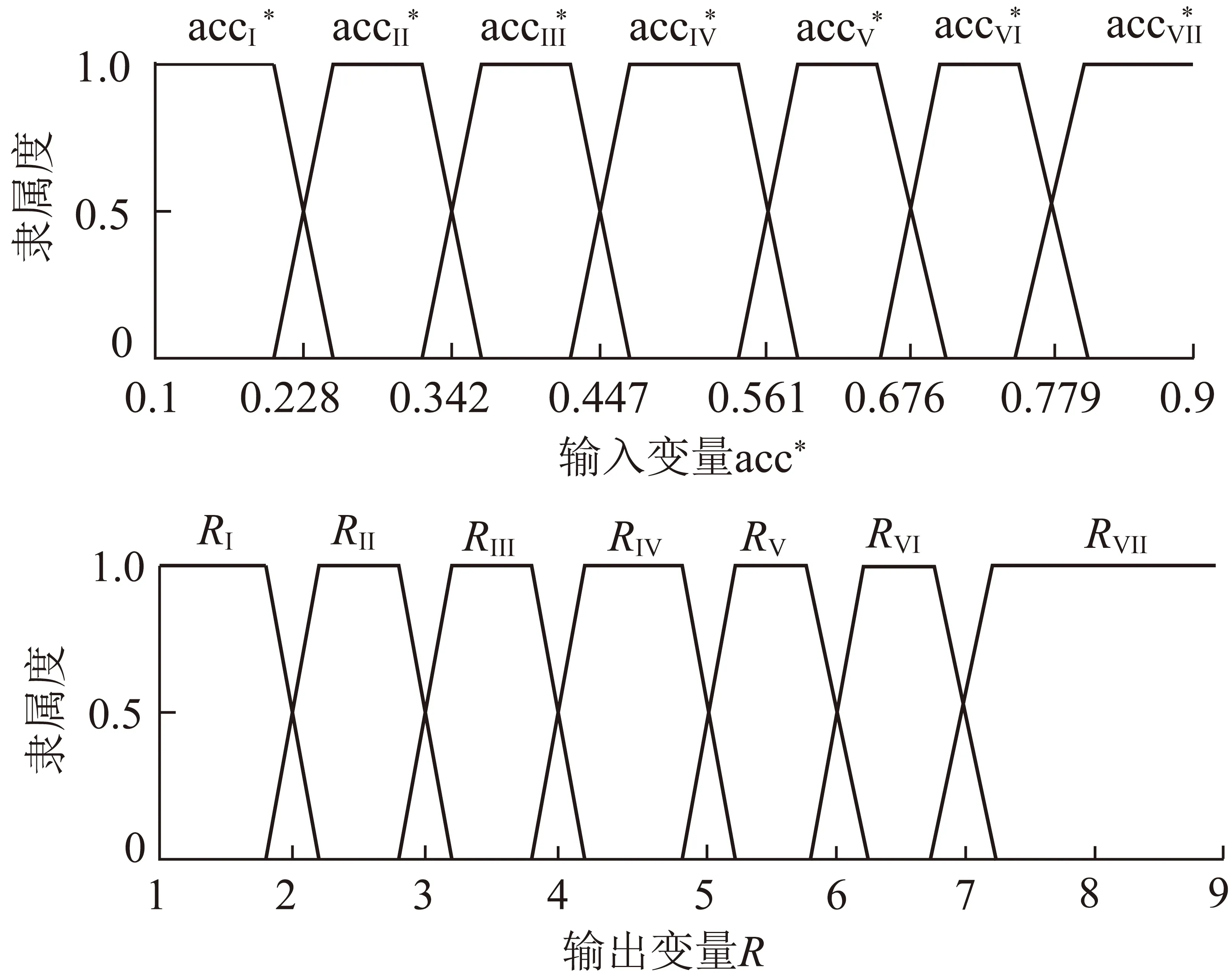
圖17 控制器CⅢ隸屬度函數(shù)Fig.17 Membership function of controller CⅢ

表8 模糊控制規(guī)則(CⅢ)
3.3 采煤機自適應(yīng)截割控制系統(tǒng)模型構(gòu)建
在對煤巖體堅固性系數(shù)進行等級劃分和截割狀態(tài)識別以及采煤機運動學(xué)參數(shù)分級多目標(biāo)優(yōu)化的基礎(chǔ)上,制定控制策略并基于Simulink搭建自適應(yīng)截割控制系統(tǒng)模型,實現(xiàn)采煤機自適應(yīng)截割控制。
考慮煤巖的非均質(zhì)性和不連續(xù)性等因素,假設(shè)煤巖體堅固性系數(shù)等級間可隨機變化(圖18)。
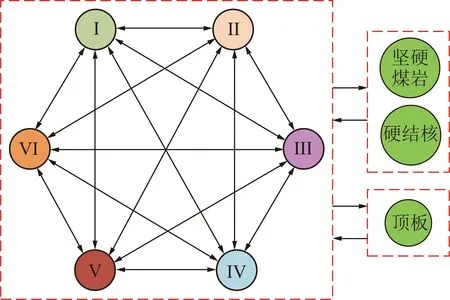
圖18 煤巖體堅固性系數(shù)等級變化情況Fig.18 Change of coal rock firmness coefficients grade
采煤機實現(xiàn)自適應(yīng)截割控制的關(guān)鍵在于基于煤巖體堅固性系數(shù)等級識別結(jié)果制定的自適應(yīng)截割控制策略。當(dāng)煤巖體堅固性系數(shù)<7時,僅采用-協(xié)同調(diào)速實現(xiàn)自適應(yīng)截割,即僅對采煤機牽引速度和滾筒轉(zhuǎn)速進行調(diào)節(jié),保持當(dāng)前調(diào)高油缸活塞位移不變;當(dāng)煤巖體堅固性系數(shù)>7時,可能存在2種截割狀態(tài),分別為截頂狀態(tài)和截堅硬煤巖層或硬結(jié)核狀態(tài),此時需要對截割狀態(tài)進行判斷,若為前者,需采用-協(xié)同調(diào)速與自適應(yīng)調(diào)高聯(lián)調(diào)的方式實現(xiàn)采煤機自適應(yīng)截割,即對采煤機牽引速度和滾筒轉(zhuǎn)速進行調(diào)節(jié)的同時,調(diào)整當(dāng)前調(diào)高油缸活塞位移,使得滾筒下降,避開頂板進行截割;若為后者,為保證采煤機動態(tài)可靠性,需按照“堅硬煤巖層或硬結(jié)核”下獲取的最優(yōu)-組合協(xié)同調(diào)速實現(xiàn)自適應(yīng)截割。根據(jù)3.2.2節(jié)建立的模糊識別控制器與多目標(biāo)優(yōu)化結(jié)果的對應(yīng)關(guān)系進行合理匹配,輸出不同工況下最優(yōu)采煤機,及調(diào)高液壓缸活塞位移變化情況,據(jù)此形成采煤機自適應(yīng)截割控制策略如圖19所示。

圖19 采煤機自適應(yīng)截割控制策略Fig.19 Self-adaptive cutting control strategy of Shearer
以采煤機自適應(yīng)截割控制策略為指導(dǎo),結(jié)合基于多目標(biāo)優(yōu)化制定的最優(yōu)決策方案,基于自適應(yīng)加權(quán)融合得到的特征數(shù)據(jù)庫及基于模糊理論輸出的煤巖堅固性系數(shù)識別結(jié)果在Simulink中搭建采煤機自適應(yīng)截割控制系統(tǒng)模型,如圖20所示。
由圖20可知,采煤機自適應(yīng)截割Simulink控制系統(tǒng)模型主要由7個模塊組成。信號處理模塊(Signal processing)實現(xiàn)對來自EDEM-RecurDyn的采煤機螺旋滾筒及搖臂的時域振動信號信息的采樣、歸一化處理及數(shù)據(jù)自適應(yīng)加權(quán)融合處理,為截割狀態(tài)模糊識別提供數(shù)據(jù)流;模糊控制模塊(Fuzzy Logic Controller)接受來自信號處理模塊的融合數(shù)據(jù)并基于模糊識別控制器實現(xiàn)截割狀態(tài)的判斷,根據(jù)煤巖體堅固性系數(shù)范圍等級劃分情況,采用7個模糊識別控制器;控制決策模塊(Control decision)分為調(diào)速控制模塊(-Control decision)與調(diào)高控制決策模塊(Height Control decision),前者根據(jù)多目標(biāo)優(yōu)化結(jié)果及煤巖體堅固性系數(shù)識別結(jié)果為仿真過程提供最優(yōu)-組合;調(diào)高控制決策根據(jù)識別結(jié)果給定調(diào)高液壓缸活塞伸縮距離目標(biāo)值;控制策略選擇模塊(Control strategy selection sub module)實現(xiàn)對滾筒截頂及截割堅硬煤巖層的判斷及采煤機牽引速度、滾筒轉(zhuǎn)速調(diào)控順序及2者與調(diào)高油缸活塞伸縮調(diào)節(jié)速率的控制,其子模型如圖21所示,筆者主要對-同時調(diào)控及牽引速度優(yōu)先于滾筒轉(zhuǎn)速的順序調(diào)控策略進行研究,,和為根據(jù)截割工況設(shè)定的初始參數(shù),Switch for,和為參數(shù)選擇開關(guān),在前3 s采煤機均以初始參數(shù)進行截割,3 s后以接收Output n caculation輸出的轉(zhuǎn)速進行截割,Data Store Memory for,和能夠存儲采煤機的實時運動學(xué)參數(shù),便于與運動學(xué)參數(shù)目標(biāo)值進行比較判斷調(diào)控的進程;Delay for/和Switch for/共同作用能夠?qū)崿F(xiàn)采煤機牽引速度、滾筒轉(zhuǎn)速調(diào)控順序的控制;Output/caculation以/實時目標(biāo)值及其與最終目標(biāo)值的差值為輸入,根據(jù)2者取值情況更新計算采煤機實時目標(biāo)運動學(xué)參數(shù)并傳遞至DDPG自適應(yīng)調(diào)節(jié)子模塊;為減小調(diào)高過程液壓缸所受的沖擊,采用勻加速—勻速—勻減速活塞位移調(diào)整策略;Delay Line和Fluc以接收于RecurDyn傳遞的滾筒截割阻力方向振動加速度信號為基礎(chǔ),計算得出采樣周期(2 s)內(nèi)滾筒振動加速度波動系數(shù),并將其值實時存儲至Data Store Memory for Fluc中,通過對比波動系數(shù)的變化趨勢以進一步判斷煤巖截割狀態(tài)。若在調(diào)高過程中波動系數(shù)持續(xù)減小,則認(rèn)為此時處于截頂狀態(tài),按照原定的調(diào)高策略繼續(xù)調(diào)整;反之若波動系數(shù)持續(xù)恒定或增大,則可判定此時處于截割硬質(zhì)煤巖或硬結(jié)核狀態(tài),需將液壓缸活塞位移向初始值調(diào)整的同時按截割堅硬煤巖或硬結(jié)核下最優(yōu)的-參數(shù)組合協(xié)同調(diào)控,從而實現(xiàn)滾筒截頂和截堅硬煤巖層或硬結(jié)核的區(qū)分。通過多次仿真能夠確定將截頂和截堅硬煤巖或硬結(jié)核區(qū)分開所需的最短采樣周期為2 s。狀態(tài)確定模塊(State determination)結(jié)合當(dāng)前采煤機牽引速度、滾筒轉(zhuǎn)速及調(diào)高油缸位移信息確定當(dāng)前煤巖截割狀態(tài);狀態(tài)選擇開關(guān)模塊(State discrimination)根據(jù)截割工況的變化選擇不同模糊控制模塊。深度確定性策略梯度算法具有復(fù)雜工況條件下自學(xué)習(xí)、自整定、自適應(yīng)能力,非常適用于非線性強、工況復(fù)雜且具有連續(xù)動作空間問題的采煤機自適應(yīng)調(diào)控系統(tǒng),可有效解決傳統(tǒng)優(yōu)化控制算法響應(yīng)速度和跟蹤性能不好等問題。筆者將DDPG(Deep Deterministic Policy Gradient)控制器應(yīng)用于截割-牽引電機協(xié)同調(diào)速和滾筒高度自適應(yīng)調(diào)節(jié)中實現(xiàn)采煤機的自適應(yīng)控制,DDPG自適應(yīng)調(diào)節(jié)子模塊的Simulink模型如圖22所示,其創(chuàng)建及訓(xùn)練過程可參考文獻[18]。
筆者僅以自適應(yīng)調(diào)高過程不同控制器控制效果進行對比,分別利用模糊PID控制器、單神經(jīng)元PID控制器及DDPG控制器實現(xiàn)采煤機液壓調(diào)高系統(tǒng)的控制,以幅值為50的階躍信號為系統(tǒng)輸入,并在仿真時間為1 s處施加幅值為5、持續(xù)時間為0.1 s的擾動信號進行仿真,驗證3者的控制性能,結(jié)果見表9。
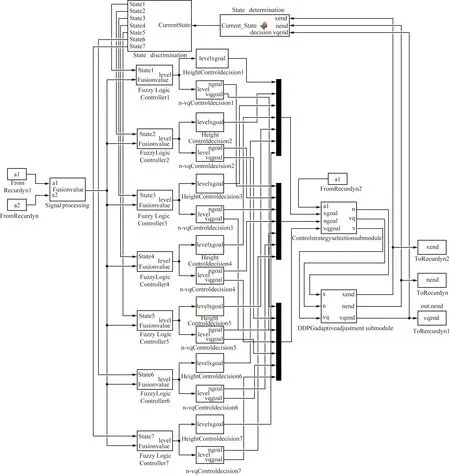
圖20 采煤機自適應(yīng)截割Simulink控制系統(tǒng)模型Fig.20 Model of self-adaptive cutting Simulink control system for Shearer
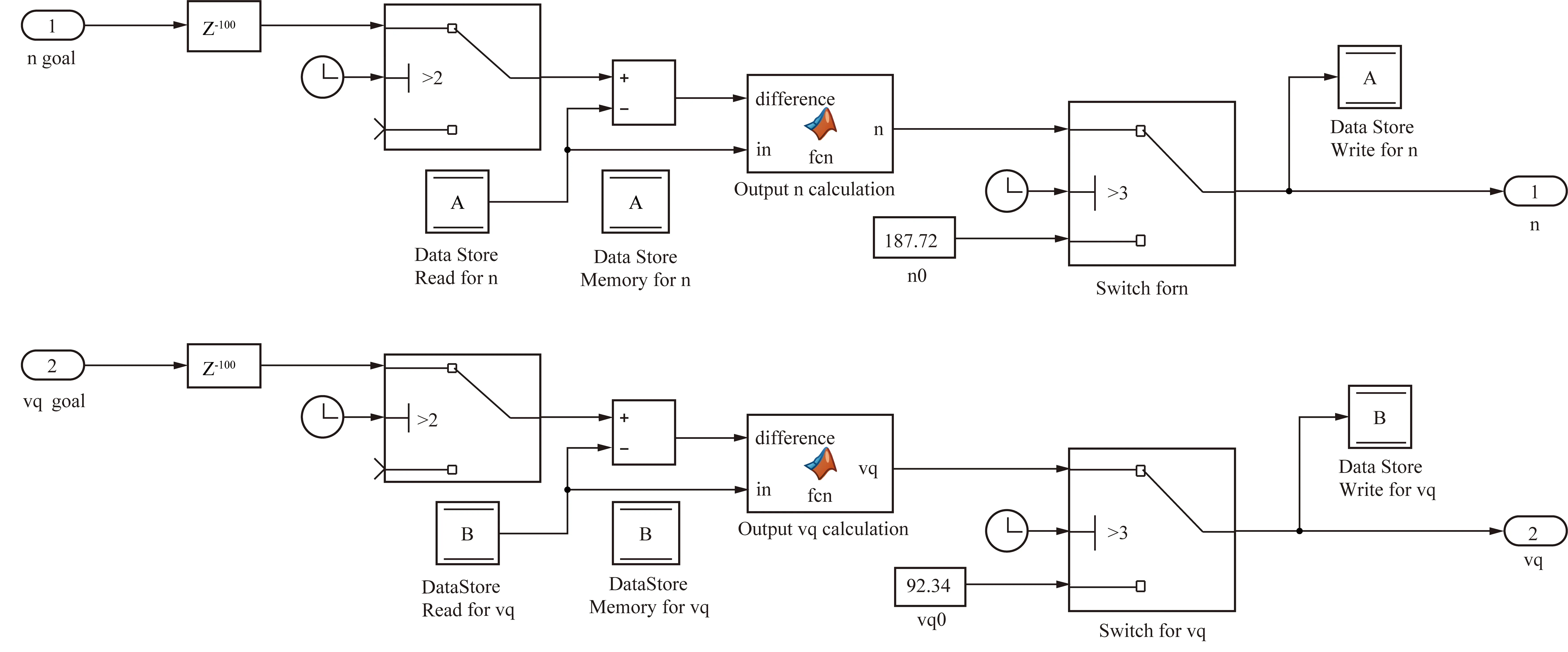
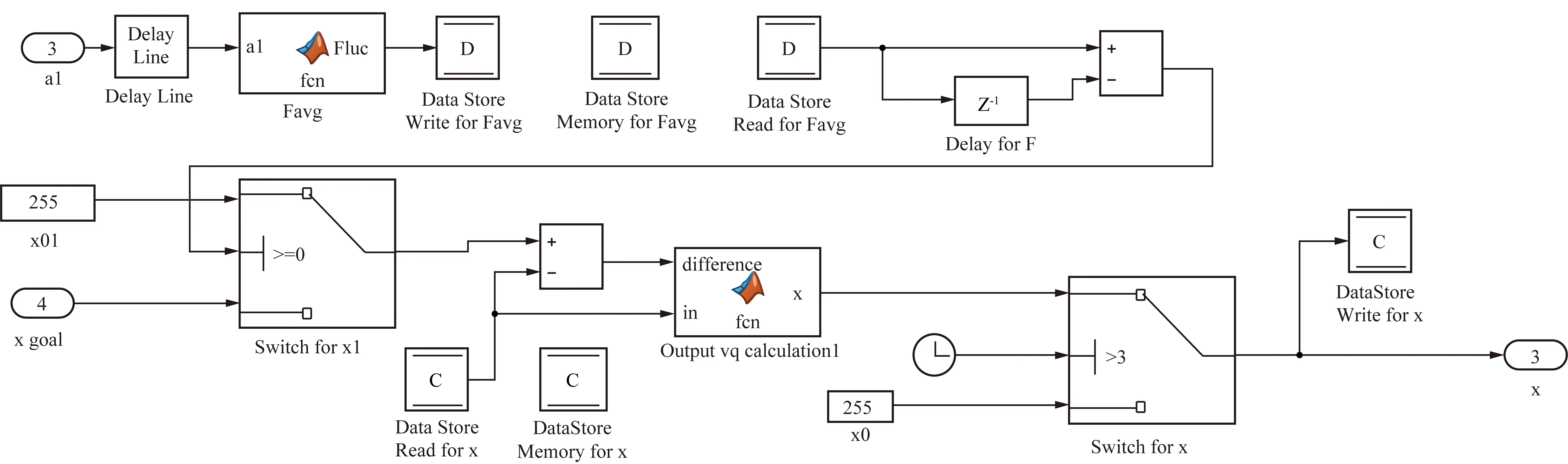
圖21 調(diào)控策略選擇子模塊Simulink模型Fig.21 Simulink model of control strategy selection sub module
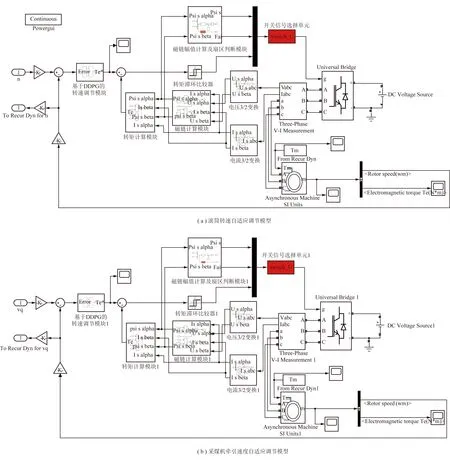
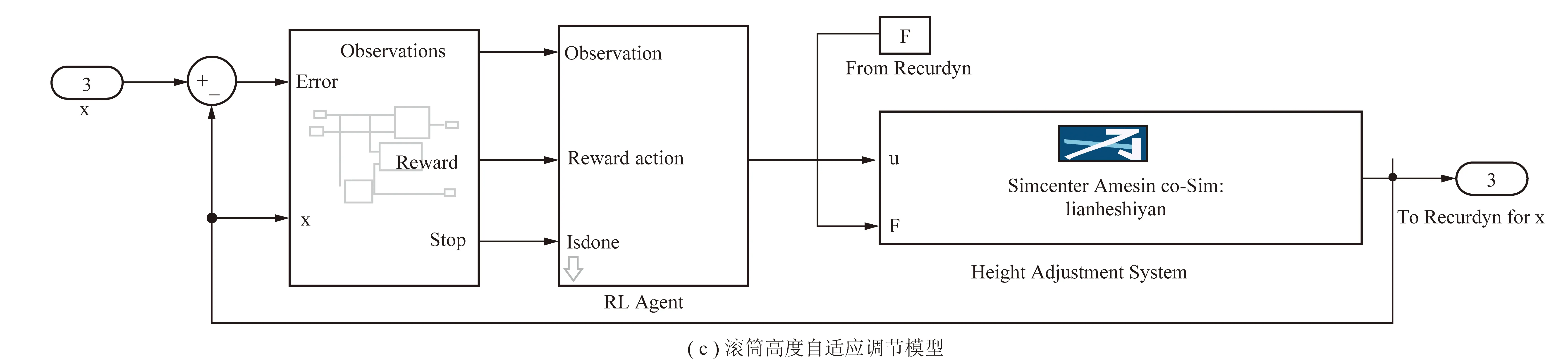
圖22 DDPG自適應(yīng)調(diào)節(jié)子模塊Simulink模型Fig.22 Simulink model of DDPG adaptive adjustment module

表9 不同控制器控制效果對比
結(jié)合表9可分析得出:無論擾動前亦或擾動后,利用模糊PID控制器、單神經(jīng)元PID控制器控制的系統(tǒng),其調(diào)整時間及穩(wěn)態(tài)誤差相近,其擾動前所需的最短調(diào)整時間(0.150 3 s)仍為利用DDPG控制器控制所需調(diào)整時間(0.084 7 s)的1.77倍,前2者最小穩(wěn)態(tài)誤差(0.276 4 mm)為后者(0.008 1 mm)的34.12倍;對比利用同一控制器控制的系統(tǒng)在擾動發(fā)生前后的性能亦發(fā)現(xiàn):擾動后利用模糊PID控制器、單神經(jīng)元PID控制器控制的系統(tǒng)調(diào)整時間及穩(wěn)態(tài)誤差分別為擾動前調(diào)整時間的6.16倍和6.15倍、穩(wěn)態(tài)誤差的1.66倍和1.50倍,而DDPG控制器控制的系統(tǒng)值則變化不大,擾動后調(diào)整時間及穩(wěn)態(tài)誤差僅為擾動前的2.53倍和1.05倍。可見DDPG控制器能夠更好滿足自適應(yīng)控制系統(tǒng)快速性和準(zhǔn)確性的要求,且具有較強的抗干擾和自適應(yīng)能力。
7個模塊相互配合、協(xié)調(diào)工作即可實現(xiàn)采煤機自適應(yīng)截割控制。
3.4 自適應(yīng)截割控制策略制定
..自適應(yīng)截割機電液控耦合系統(tǒng)模型構(gòu)建
多領(lǐng)域協(xié)同仿真與控制的基本流程包括:構(gòu)造動力學(xué)模型、確定協(xié)同仿真軟件間的輸入輸出、搭建液壓系統(tǒng)模型、構(gòu)造控制系統(tǒng)、聯(lián)合仿真。
以Simulink為主環(huán)境進行仿真,據(jù)此搭建的EDEM-RecurDyn-AMEsim-Simulink機-電-液-控多領(lǐng)域協(xié)同仿真模型如圖23所示,圖中為滾筒質(zhì)心瞬時振動加速度;為煤巖顆粒對螺旋滾筒作用力;為用以控制電液比例換向閥的電信號;′為調(diào)高油缸作用力。
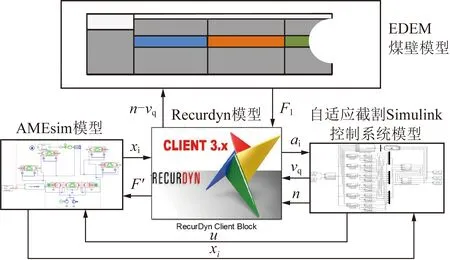
圖23 自適應(yīng)截割機-電-液-控耦合系統(tǒng)模型Fig.23 Adaptive cutting machine-electric-hydraulic-control coupling system model
..最優(yōu)控制策略制定
采用采煤機牽引速度和滾筒轉(zhuǎn)速協(xié)同調(diào)速的控制策略,而協(xié)同控制根據(jù)調(diào)控順序可分為同時調(diào)控和順序調(diào)控,順序調(diào)控可分為牽引速度優(yōu)先于滾筒轉(zhuǎn)速調(diào)控和滾筒轉(zhuǎn)速優(yōu)先于牽引速度調(diào)控2種方式,考慮到經(jīng)優(yōu)化后所得采煤機最優(yōu)運動學(xué)參數(shù)組合均顯現(xiàn)出隨著煤巖體值增大而減小的趨勢(表5),若選擇滾筒轉(zhuǎn)速優(yōu)先于牽引速度調(diào)控時,當(dāng)識別到煤巖體值增大時,滾筒轉(zhuǎn)速的降低在短時內(nèi)會加劇滾筒的受載,反之識別到煤巖體值降低時,滾筒轉(zhuǎn)速優(yōu)先于牽引速度調(diào)控會降低煤機的生產(chǎn)效率,據(jù)此主要針對牽引速度優(yōu)先于滾筒轉(zhuǎn)速調(diào)控和同時調(diào)控2種方式,分別以=3.5降至=1.5和=3.5升至=5.5兩種工況為例進行控制性能分析,工況設(shè)計如圖24所示。
在Simulink控制系統(tǒng)模型中編寫同時調(diào)控和順序調(diào)控程序,并根據(jù)初始截割工況添加采煤機最優(yōu)牽引速度4.13 m/min、最優(yōu)滾筒轉(zhuǎn)速84.36 r/min,選擇斜坡調(diào)速方案對2者速度進行調(diào)節(jié),調(diào)控策略如圖25所示,可見,2個工況的調(diào)節(jié)過程均包含順序調(diào)控和同時調(diào)控2種策略,基于此,利用3.4.1節(jié)搭建的自適應(yīng)截割機-電-液-控耦合系統(tǒng)模型進行聯(lián)合仿真,最終通過數(shù)據(jù)整合分析2種調(diào)控策略下采煤機各性能指標(biāo),結(jié)果如圖26所示。

圖24 模擬截割工況Fig.24 Simulated cutting condition
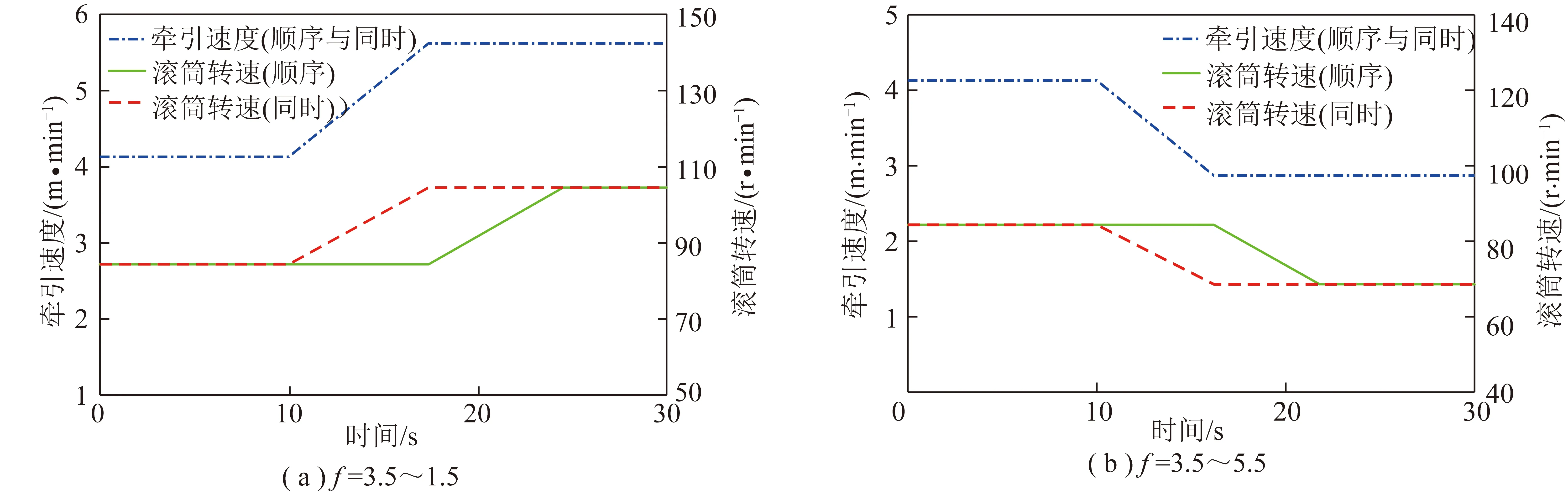
圖25 采煤機vq-n調(diào)控策略Fig.25 vq-n control strategy of shearer
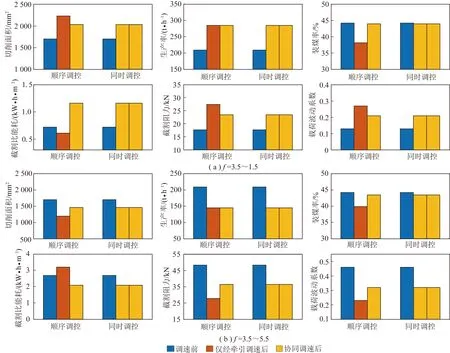
圖26 f=3.5~1.5,3.5~5.5調(diào)節(jié)過程采煤機性能指標(biāo)變化情況Fig.26 Changes of shearer performance indexes during the regulation process of f =3.5-1.5,3.5-5.5
由圖26(a)可知,在采煤機截割過程中,隨著煤巖堅固性系數(shù)的減小,相比于同時調(diào)控策略,順序調(diào)控策略在增大切削面積、降低能耗2個方面占據(jù)優(yōu)勢,而在提升裝煤率、降低滾筒受載和減小載荷波動3個方面處于劣勢,在提升生產(chǎn)率方面2者具有相同的貢獻,但考慮到使采煤機綜合性能最優(yōu),雖然順序調(diào)控策略相比于該工況下同時調(diào)控策略能夠?qū)⑶邢髅娣e提升9.7%、能耗降低15.2%,但以裝煤率降低13.21%、滾筒受載增加16.9%、載荷波動增加28.6%為代價,因此在識別到煤巖體值減小的工況下選用同時調(diào)控策略更合適。
由圖26(b)可以看出,在采煤機截割過程中,隨著煤巖堅固性系數(shù)的增大,相比于同時調(diào)控策略,順序調(diào)控策略在降低滾筒受載和減小載荷波動2個方面占據(jù)優(yōu)勢,而在提升裝煤率、增大切削面積和降低能耗3個方面處于劣勢,在提升生產(chǎn)率方面兩者具有相同的貢獻,但考慮到采煤機工作過程中遇到煤巖體值增大的工況時,其通常處于載荷過大工作狀態(tài),易對采煤機動態(tài)可靠性造成威脅,此時首要的是進行降載,減小煤機過載時間,而順序調(diào)控策略相比于同時調(diào)控策略在該工況下能夠使?jié)L筒受載降低23.7%、載荷波動減小28.1%,因此在識別到煤巖體值增大的工況下,為保證采煤機動態(tài)可靠性,選用順序調(diào)控策略更為合適,研究結(jié)果表明,所提出的調(diào)控策略具有普適性。
4 采煤機自適應(yīng)截割系統(tǒng)性能分析
4.1 采煤機自適應(yīng)截割工況設(shè)計
為驗證采煤機自適應(yīng)截割控制系統(tǒng)及其控制策略的可行性,基于兗州煤業(yè)集團楊村煤礦4602工作面煤層賦存條件,搭建EDEM模擬仿真煤壁模型,其煤巖體物理力學(xué)參數(shù)見表10,同時為縮短仿真時間、減小計算量并降低對計算機硬件的要求,采用建立分段煤壁模型方法將整體煤壁進行拆分,來模擬采煤機截割過程,搭建的煤壁模型如圖27,28所示。

表10 煤巖體物理力學(xué)參數(shù)
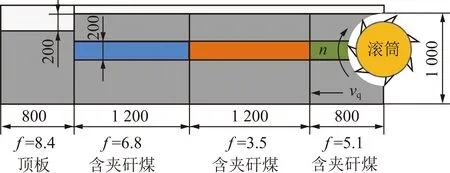
圖27 自適應(yīng)截割系統(tǒng)性能驗證工況Fig.27 Performance verification condition of self-adaptive cutting system
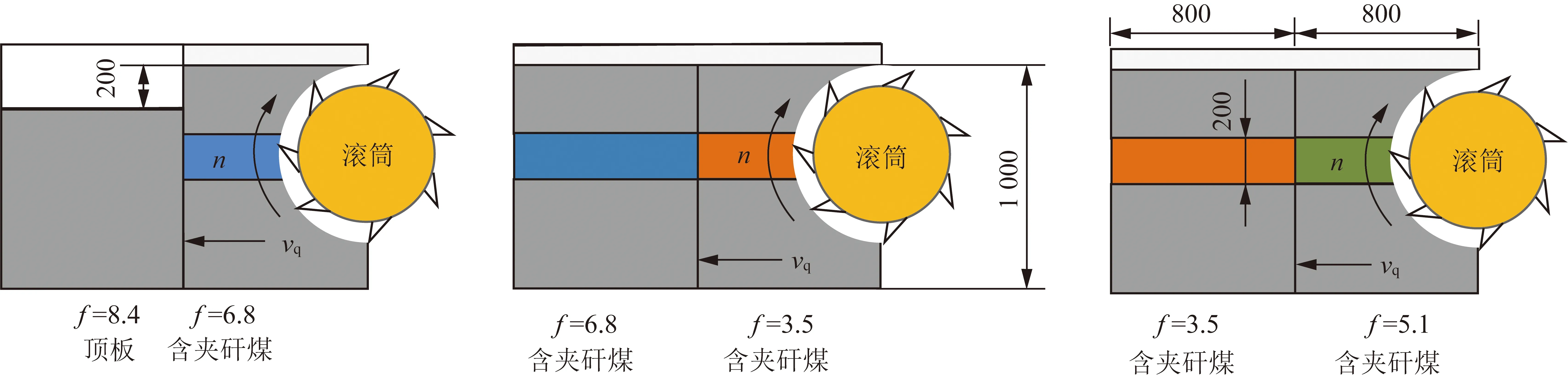
圖28 分段模擬截割工況模型Fig.28 Model of section simulation cutting condition
4.2 自適應(yīng)截割仿真及性能分析
根據(jù)圖27,在Simulink控制系統(tǒng)模型中添加采煤機最優(yōu)運動學(xué)參數(shù)(=2.87 m/min,=68.54 r/min),調(diào)整滾筒高度至最優(yōu)位置,進行EDEM-RecurDyn-AMEsim-Simulink多領(lǐng)域協(xié)同仿真,得到基于自適應(yīng)截割控制策略下采煤機牽引速度和滾筒轉(zhuǎn)速、滾筒受載、截割電機定子電流、截割電機輸出轉(zhuǎn)速、調(diào)高液壓缸活塞位移變化情況如圖29~33所示。
由圖29~31可知,在0~9 s,采煤機以最優(yōu)運動學(xué)參數(shù)=2.87 m/min,=68.54 r/min運行,且在8.36 s前滾筒受載均值都在48 kN左右,定子電流幅值穩(wěn)定在79 A左右;而在8.36~9.00 s滾筒受載突然降低,低至23 kN左右,定子電流幅值亦從79 A降至48 A左右,說明此時截割工況發(fā)生了變化;在9 s開始采煤機牽引速度和滾筒轉(zhuǎn)速同時升高,表明系統(tǒng)僅經(jīng)過0.64 s即感知到工況的變化,具備較好的實時性和響應(yīng)的快速性;在9.0~13.2 s,采煤機運動學(xué)參數(shù)調(diào)至=4.13 m/min,=84.36 r/min,此運動學(xué)參數(shù)組合恰好對應(yīng)煤巖堅固性系數(shù)等級為Ⅲ級的最優(yōu)運動參數(shù),結(jié)合驗證工況設(shè)計情況,說明此時截割工況為=3.5的含夾矸煤,表明系統(tǒng)能夠準(zhǔn)確的感知到工況變化并能夠?qū)崿F(xiàn)精準(zhǔn)調(diào)控,在9.0~13.2 s調(diào)節(jié)過程中滾筒受載亦隨著牽引速度和滾筒轉(zhuǎn)速的升高而增大,在13.2 s時趨于穩(wěn)定,定子電流幅值由48 A逐漸增至70.5 A左右;滾筒在13.2~27.1 s處于穩(wěn)定截割狀態(tài),受載均值在42 kN左右,定子電流幅值穩(wěn)定在70.5 A;在27.10~27.62 s,滾筒受載劇增,高達90 kN左右,定子電流幅值從70.5 A突增至141 A左右,說明此時工況變得惡劣,根據(jù)調(diào)控策略需采用順序調(diào)速對其進行控制;在13.20~27.62 s,采煤機均以=4.13 m/min,=84.36 r/min穩(wěn)定運行,在27.62 s時開始對牽引速度進行調(diào)節(jié),表明此時系統(tǒng)經(jīng)過0.52 s感知到工況的變化;在27.62~33.02 s,牽引速度由4.13 m/min降至2.39 m/min,滾筒受載降至30.5 kN左右,定子電流幅值降至60 A左右,表明采煤機遇到惡劣工況時降低牽引速度能夠達到迅速降載的目的,起到保護采煤機、延長其使用壽命的作用;在33.02~38.32 s,牽引速度保持2.39 m/min不變,滾筒轉(zhuǎn)速由84.36 r/min降至64.92 r/min,滾筒受載逐漸增大,定子電流幅值增至84 A左右,這是由于在牽引速度不變的情況下,轉(zhuǎn)速的降低使最大切削厚度增大,滾筒受載增大,在38.32~55.80 s滾筒處于穩(wěn)定截割狀態(tài),受載均值在54 kN左右,定子電流幅值恒定在84 A左右;在55.80~56.61 s,滾筒受載突增至82 kN左右,定子電流幅值增至117 A左右;在56.61~62.41 s滾筒受載迅速下降,定子電流幅值降至42 A左右;而在38.32~62.41 s,采煤機均以=2.39 m/min,=64.92 r/min運行并未進行調(diào)整,表明此時滾筒降載并非經(jīng)-協(xié)同調(diào)速所實現(xiàn),結(jié)合圖33可知,在0~56.61 s,液壓缸活塞伸出位移恒定在255 mm左右,說明滾筒并未進行高度調(diào)節(jié);在56.61~62.41 s,液壓缸活塞伸出位移開始減小,最終恒定在191 mm左右,表明此階段系統(tǒng)能夠準(zhǔn)確感知到截割頂板的工況,且能夠?qū)崿F(xiàn)對滾筒高度的自適應(yīng)調(diào)整;在62.41~68.61 s,牽引速度及滾筒轉(zhuǎn)速分別由2.39 m/min,64.92 r/min升至4.92 m/min,95.43 r/min,定子電流幅值升至48 A左右,滾筒受載均值升至35 kN左右,說明此時系統(tǒng)感知到煤巖堅固性系數(shù)等級為II級,結(jié)合驗證工況設(shè)計情況,說明此時截割工況為=2.38的煤,再次驗證了自適應(yīng)截割系統(tǒng)的準(zhǔn)確性。此外,由圖29,32可以看出,2者保持高度一致性,說明基于DDPG對電機調(diào)速的可行性。
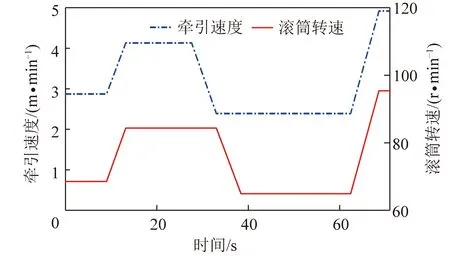
圖29 最優(yōu)牽引速度-滾筒轉(zhuǎn)速Fig.29 Optimal traction speed-drum speed
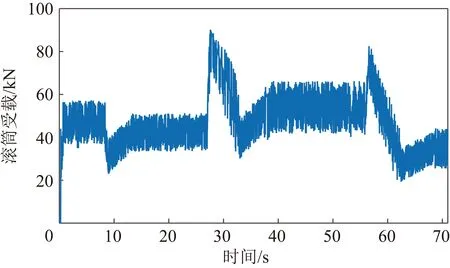
圖30 自適應(yīng)截割控制策略條件下滾筒受載Fig.30 Drum load under the condition of self-adaptive cutting control strategy
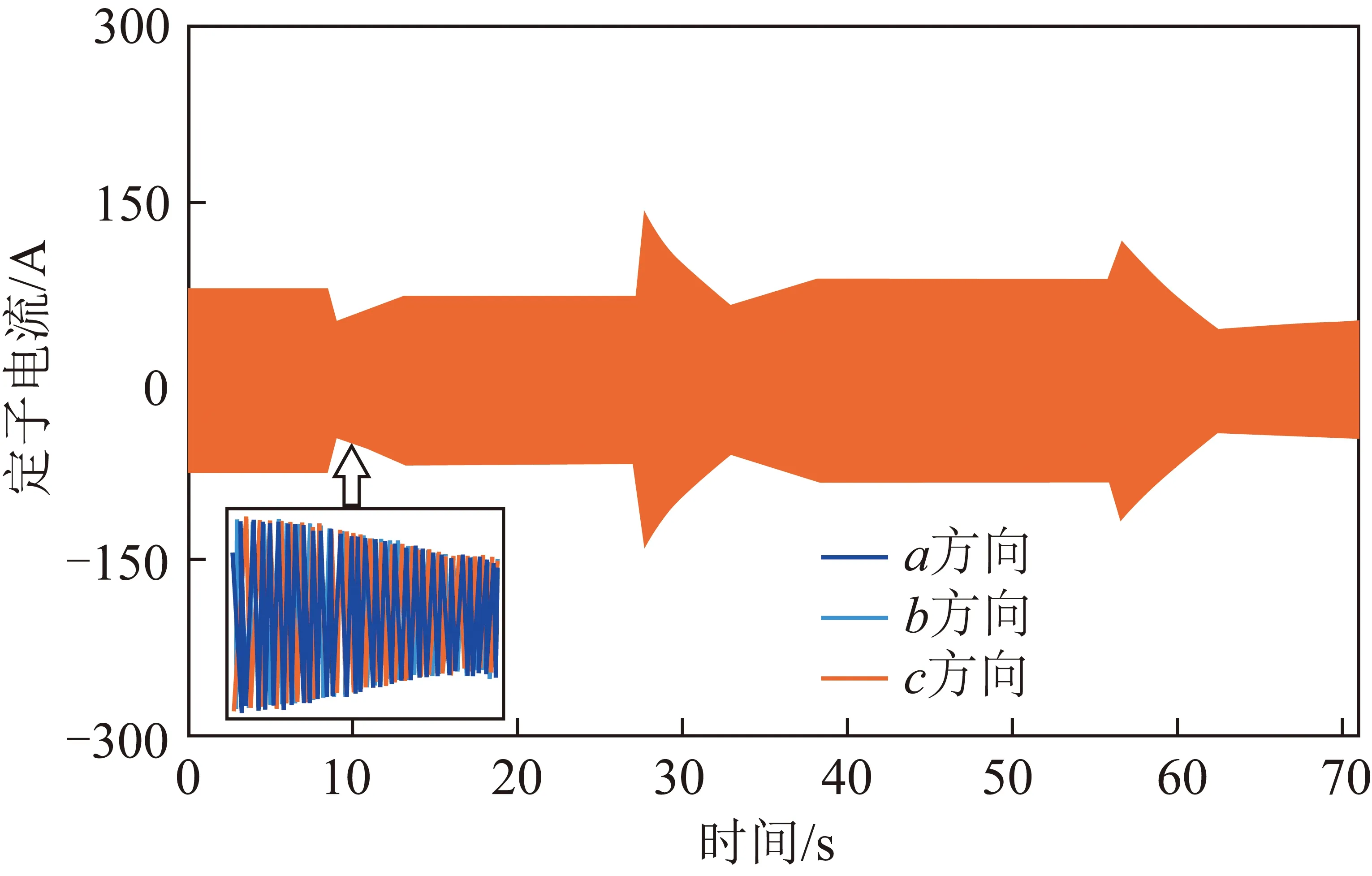
圖31 截割電機定子電流變化情況Fig.31 Change of stator current of cutting motor
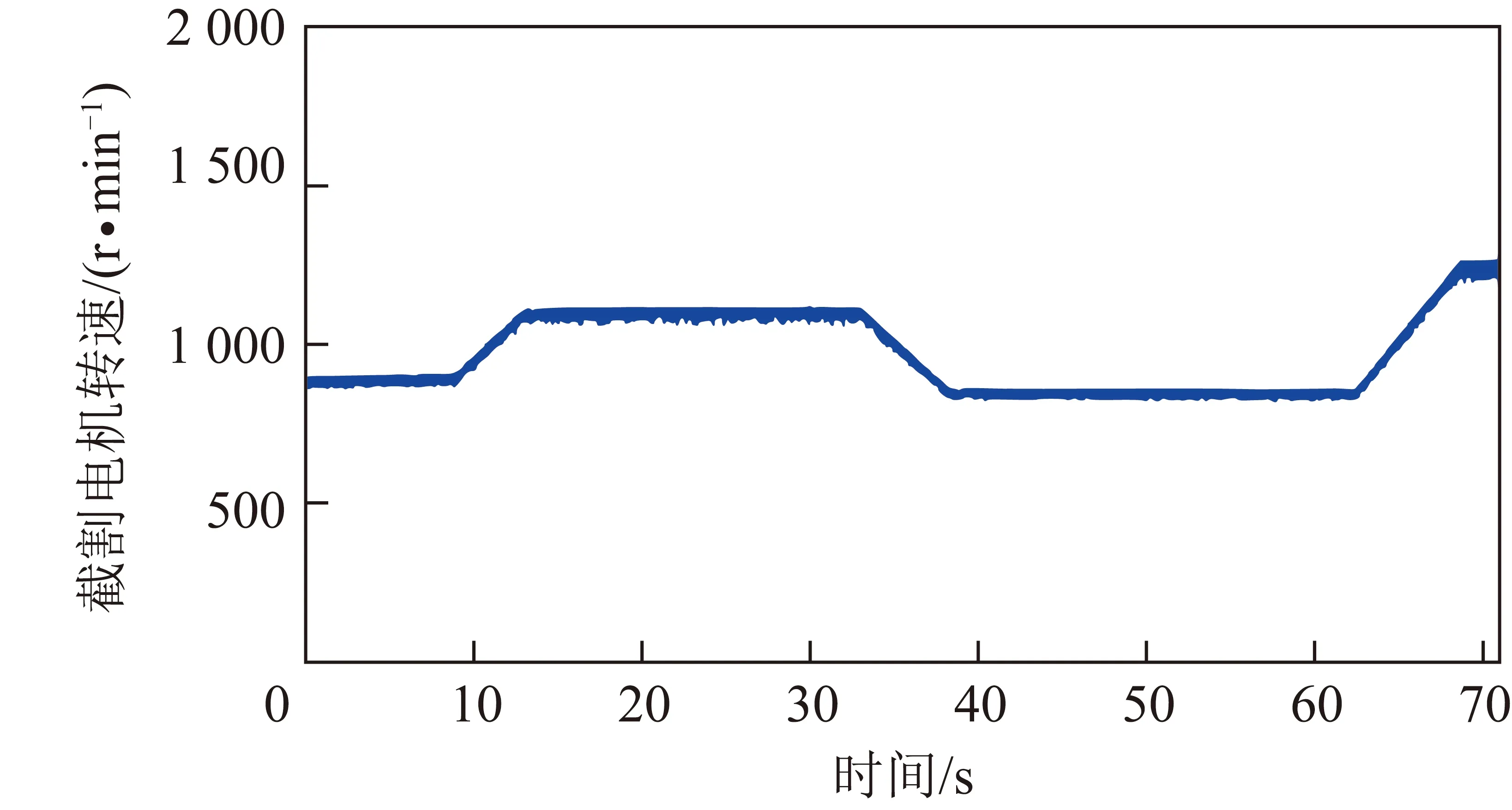
圖32 截割電機輸出轉(zhuǎn)速Fig.32 Cutting motor output speed
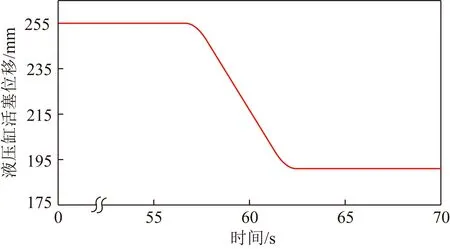
圖33 液壓缸活塞位移變化曲線Fig.33 Variation curve of piston displacement of hydraulic cylinder
綜上,自適應(yīng)截割控制系統(tǒng)可實現(xiàn)針對不同工況精準(zhǔn)判斷所處煤巖堅固性系數(shù)的等級,并能夠?qū)Σ擅簷C牽引速度、滾筒轉(zhuǎn)速及滾筒高度按照預(yù)期調(diào)控策略進行精準(zhǔn)控制,且具有調(diào)節(jié)的實時性和響應(yīng)的快速性,表明所搭建的自適應(yīng)截割系統(tǒng)實現(xiàn)煤巖截割狀態(tài)的實時感知、精準(zhǔn)判別與決策控制的可行性。
5 試驗驗證
根據(jù)相似準(zhǔn)則建立幾何相似比為1∶2的采煤機自適應(yīng)截割綜合試驗系統(tǒng)平臺,如圖34所示。
采煤機牽引速度和滾筒轉(zhuǎn)速分別采用電液比例變量泵-牽引油缸和電液比例變量泵-定量馬達容積調(diào)速進行調(diào)節(jié),滾筒高度采用定量泵-調(diào)高油缸進行調(diào)節(jié);上位機監(jiān)控系統(tǒng)基于LabVIEW開發(fā)。為了驗證所提出的自適應(yīng)截割控制策略,基于組件模型(COM)技術(shù)實現(xiàn)LabVIEW對所搭建的控制系統(tǒng)Simulink模型的調(diào)用。通過數(shù)據(jù)采集卡對滾筒截割阻力方向振動加速度信號進行采集,并經(jīng)過信號轉(zhuǎn)換后傳輸至上位機監(jiān)控系統(tǒng)進行分析、處理和輸出至交互式平臺顯示,根據(jù)煤巖堅固性系數(shù)等級識別結(jié)果向機載控制系統(tǒng)發(fā)出控制指令;將SIMATIC S7-200 SMART PLC作為機載測控系統(tǒng)的核心,基于OPC建立與上位機監(jiān)控系統(tǒng)的通訊,以自適應(yīng)截割控制策略為指導(dǎo),結(jié)合接收的控制指令設(shè)計PLC控制程序,實現(xiàn)對馬達、牽引油缸和調(diào)高液壓缸的控制,自適應(yīng)截割綜合控制試驗系統(tǒng)結(jié)構(gòu)如圖35所示。

圖34 采煤機自適應(yīng)截割綜合試驗系統(tǒng)平臺Fig.34 Shearer self-adaptive cutting comprehensive test system platform
根據(jù)相似準(zhǔn)則推導(dǎo)相似夾矸煤巖性能參數(shù),將砂子、水泥、石膏、水按不同比例混合澆筑得到與4.1節(jié)結(jié)構(gòu)及性能相一致的相似煤壁實體模型。
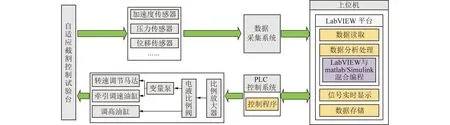
圖35 自適應(yīng)截割控制綜合試驗系統(tǒng)結(jié)構(gòu)Fig.35 Structure block diagram of integrated test system for adaptive cutting
采用采煤機自適應(yīng)截割控制綜合試驗系統(tǒng)平臺,整理采集數(shù)據(jù),獲取試驗條件下采煤機牽引速度、滾筒轉(zhuǎn)速、液壓缸活塞位移變化及其相似反推數(shù)據(jù),如圖36,37所示,基于相似準(zhǔn)則,確定牽引速度、滾筒轉(zhuǎn)速、時間相似比分別為1∶0.6,1∶1.2,1∶0.83。
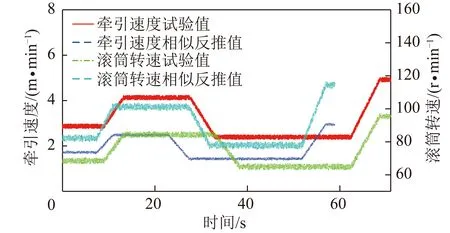
圖36 vq-n試驗結(jié)果及相似反推結(jié)果數(shù)據(jù)Fig.36 vq-n test results and the data of similar back deduction results
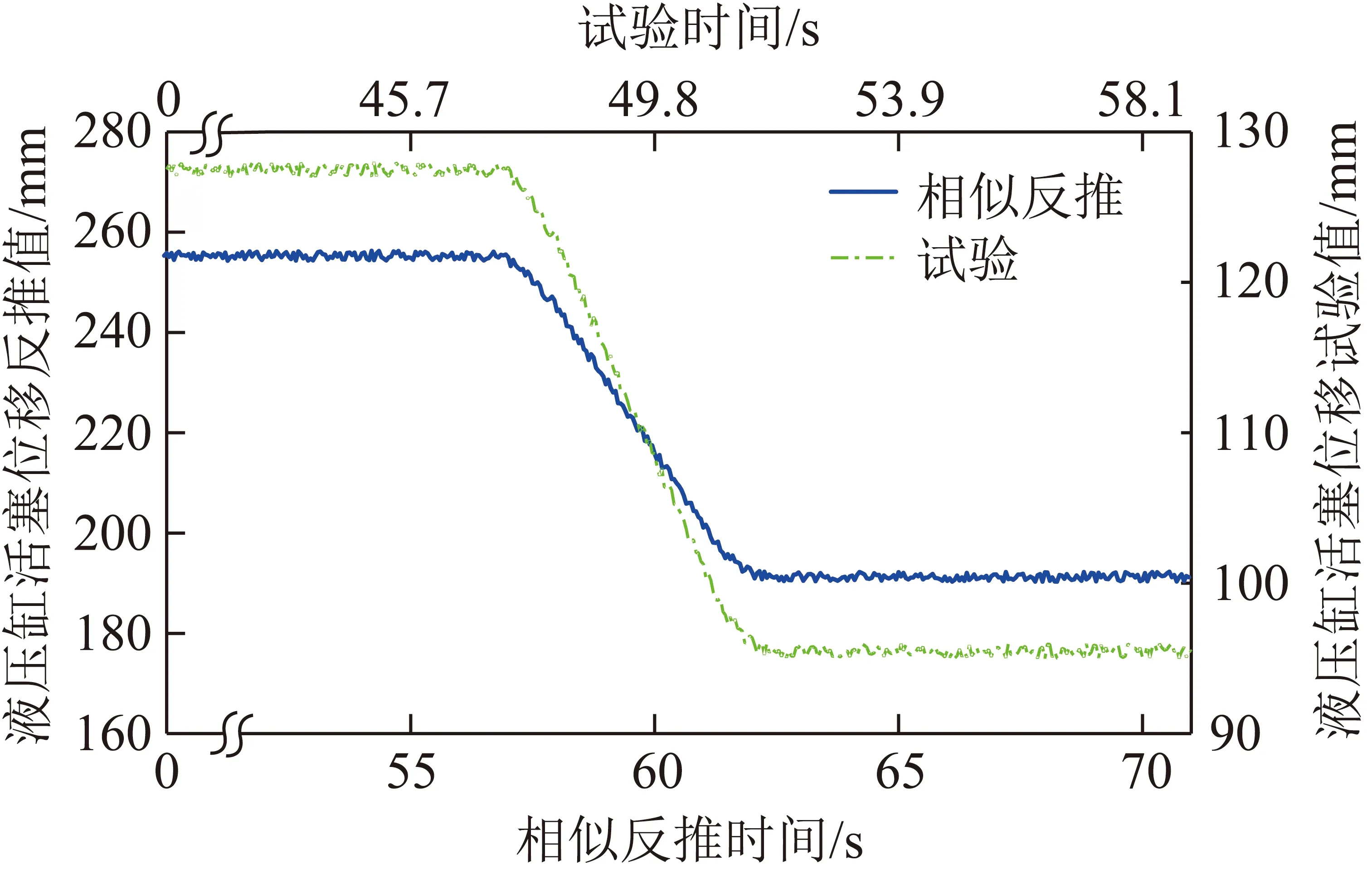
圖37 液壓缸活塞位移試驗結(jié)果及相似反推結(jié)果數(shù)據(jù)Fig.37 Hydraulic cylinder piston displacement test results and back deduction results data
由圖36,37可知,試驗過程中采煤機牽引速度、滾筒轉(zhuǎn)速及液壓缸活塞位移在較小范圍內(nèi)波動,變化趨勢與仿真過程保持高度一致,采煤機牽引速度、滾筒轉(zhuǎn)速及液壓缸活塞位移相似反推結(jié)果數(shù)據(jù)與仿真結(jié)果最大誤差分別為4.76%,5.35%和3.98%,驗證了采煤機自適應(yīng)截割控制策略的可行性與正確性。
6 結(jié) 論
(1)基于虛擬樣機技術(shù)、模糊控制技術(shù),結(jié)合數(shù)據(jù)自適應(yīng)加權(quán)融合算法、深度強化學(xué)習(xí)算法,采用多領(lǐng)域建模與協(xié)同仿真方法,搭建了機-電-液-控一體化的采煤機自適應(yīng)截割控制系統(tǒng)。
(2)基于EDEM-RecurDyn-AMEsim構(gòu)建多領(lǐng)域協(xié)同仿真機-液耦合模型,基于仿真結(jié)果為自適應(yīng)截割控制系統(tǒng)提供仿真數(shù)據(jù)流,為制定最優(yōu)控制策略并實現(xiàn)對機-液耦合模型的精準(zhǔn)控制提供數(shù)據(jù)保障。
(3)利用Simulink建立采煤機自適應(yīng)截割控制系統(tǒng)及電機模型,利用改進的MOGWO算法獲得使采煤機綜合性能最優(yōu)的運動學(xué)參數(shù)組合,基于模糊控制技術(shù)、DDPG算法搭建煤巖截割狀態(tài)識別模型,并采用基于接口的技術(shù)實現(xiàn)EDEM-RecurDyn-AMEsim-Simulink的耦合,搭建了采煤機自適應(yīng)截割控制系統(tǒng),實現(xiàn)機-電-液系統(tǒng)與控制系統(tǒng)深度融合。
(4)基于搭建的系統(tǒng),研究不同工況下采煤機的最優(yōu)控制策略。所遇工況煤巖堅固性系數(shù)增大時,相比于同時調(diào)控策略,牽引速度優(yōu)先滾筒轉(zhuǎn)速的順序調(diào)控策略可使?jié)L筒受載降低23.7%、載荷波動減小28.1%;所遇工況煤巖堅固性系數(shù)減小時,相比于同時調(diào)控策略,順序調(diào)控策略雖能將切削面積提升9.7%、能耗降低15.2%,但以裝煤率降低13.21%、滾筒受載增加16.9%、載荷波動增加28.6%為代價,此工況下,為使采煤機綜合性能最優(yōu),選用同時調(diào)控策略。
(5)以兗州煤業(yè)集團楊村煤礦4602工作面煤層參數(shù)為依據(jù),以仿真過程中采煤機牽引速度及滾筒轉(zhuǎn)速、滾筒受載和液壓缸活塞位移的變化為性能評價指標(biāo),對所搭建的系統(tǒng)進行性能分析及可行性驗證,結(jié)果表明,系統(tǒng)能夠精準(zhǔn)判斷所處的煤巖堅固性系數(shù)等級,并按照預(yù)期調(diào)控策略進行精準(zhǔn)控制,最長僅0.64 s便能感知到工況變化,具有較優(yōu)的調(diào)節(jié)實時性和響應(yīng)快速性,表明所搭建的自適應(yīng)截割控制系統(tǒng)的可行性與正確性,并通過了物理試驗平臺的驗證,表明系統(tǒng)可實現(xiàn)煤巖截割狀態(tài)的實時感知、精準(zhǔn)判別與決策控制,可有效提高采煤機對復(fù)雜煤層的適應(yīng)性,為推動煤炭智能化開采探索一種先進有效的途徑。
[1] 葛世榮. 打造煤礦智能化的中國模式[N]. 中國煤炭報,2020-03-14(003).
GE Shirong. Build a Chinese model of intelligent coal mine[N]. http://www. ccoalnews. com/,2020-03-14(003).
[2] 王國法,劉峰,龐義輝,等. 煤礦智能化——煤炭工業(yè)高質(zhì)量發(fā)展的核心技術(shù)支撐[J]. 煤炭學(xué)報,2019,44(2):349-357.
WANG Guofa,LIU Feng,PANG Yihui,et al. Coal mine intellectualization:The core technology of high quality development[J]. Journal of China Coal Society,2019,44(2):349-357.
[3] JASZCZUK M. Efficiency analysis of the drum shearer loading process[J]. Glueckauf Forschungshefte,2001,62(3):108-118.
[4] WYK GV,DNJ Els,AKDOGAN G,et al. Discrete element simulation of tribological interactions in rock cutting[J]. International Journal of Rock Mechanics & Mining Sciences,2014,65(1):8-19.
[5] BALCI C,DEMIRCIN M A,COPUR H,et al. Estimation of optimum specific energy based on rock properties for assessment of roadheader performance(567BK)[J]. Journal of the Southern African Institute of Mining and Metallurgy,2004,104(11):633-641.
[6] TUMAC D,BILGIN N,FERIDUNOGLU C,et al. Estimation of rock cuttability from shore hardness and compressive strength properties [J]. Rock Mech. Rock Eng. ,2007,40:477-490.
[7] 劉永剛,閆忠良,秦大同,等. 采煤機無人自適應(yīng)變速截割控制方法[J]. 中南大學(xué)學(xué)報(自然科學(xué)版),2017,48(6):1513-1521.
LIU Yonggang,YAN ZhongLiang,QIN Datong,et al. Adaptive control method of unmanned shearer with variable speed cutting[J]. Journal of Central South University(Science and Technology),2017,48(6):1513-1521.
[8] 金忠峰. 薄煤層采煤機運動參數(shù)最佳匹配及關(guān)鍵零件可靠性研究[D]. 阜新:遼寧工程技術(shù)大學(xué),2017.
JIN Zhongfeng. Study on the best match of the movememt parameters and thereliability of the key parts of the thin coal seam shearer[D]. Fuxin:Liaoning Technical University,2017.
[9] 司壘. 采煤機智能控制關(guān)鍵技術(shù)研究[D]. 徐州:中國礦業(yè)大學(xué),2015.
SI Lie. Research on key technologies of intelligent control for shearer[D]. Xuzhou:China University of Mining and Technology,2015.
[10] 陳晨. 煤巖截割狀態(tài)識別與采煤機控制策略研究[D]. 西安:西安科技大學(xué),2019.
CHEN Chen. Study on the recognition of coal and rock cutting state and the control strategy of shearer[D]. Xi’an:Xi’an University of Science and Technology,2019.
[11] BAKHTAVA R,SHAHRIA R. Selection ofa practicable shearer loader based on mechanical properties of coal for parvadeh 1 mine[J]. Archives of Mining Sciences,2013,58(1):146-157.
[12] 毛清華,趙健博,李亞周,等. 基于ELM神經(jīng)網(wǎng)絡(luò)的采煤機截割載荷軟測量建模方法[J]. 西安科技大學(xué)學(xué)報,2020,40(5):769-774.
MAO Qinghua,ZHAO Jianbo,LI Yazhou,et al. Soft sensor modeling method of shearer cutting load based on ELM neural network[J]. Journal of Xi’an University of Science and Technology,2020,40(5):769-774.
[19] MAO Qinghua,ZHAO Jianbo,LI Yazhou,et al. Soft sensor modeling method of shearer cutting load based on ELM neural network[J]. Journal of Xi’an University of Science and Technology,2020,40(5):769-774.
[13] 劉力濤,董淑棠. 基于BP神經(jīng)網(wǎng)絡(luò)的采煤機截割自適應(yīng)調(diào)速控制[J]. 煤礦機械,2020,41(8):197-199.
LIU Litao,DONG Shutang. Adaptive speed regulation control of shearer cutting based on bp neural network[J]. Coal Mine Machinery,2020,41(8):197-199.
[14] 邱呈祥. 基于GIS系統(tǒng)的采煤機導(dǎo)航自適應(yīng)截割技術(shù)研究[J]. 煤礦現(xiàn)代化,2021,30(4):113-115.
QIU Chengxiang. Research on navigation adaptive cutting technology of shearer based on GIS system[J]. Coal Mine Modernization,2021,30(4):113-115.
[15] 張雨瀟. 基于LabVIEW的數(shù)字礦山自動開采關(guān)鍵技術(shù)研究[D]. 成都:成都理工大學(xué),2020.
ZHANG Yuxiao. labVIEW-Based research on key techenologies for digital mines automation[D]. Chengdu:Chengdu University of Technology,2020.
[16] 雷錦紅. 采煤機截割電機變頻調(diào)速方案[J]. 自動化應(yīng)用,2019(12):118-119.
LEI Jinhong. Frequency conversion speed regulation scheme of shearer cutting motor[J]. Automation Application,2019(12):118-119.
[17] 劉晉宇. 基于突發(fā)情況的采煤機調(diào)速方案設(shè)計[J]. 自動化應(yīng)用,2019(3):39-40,43.
LIU Jinyu. Speed regulation scheme design of shearer based on sudden situation[J]. Automation Application,2019(3):39-40.
[18] 王雅東,趙麗娟,張美晨. 采煤機自適應(yīng)調(diào)高控制策略研究[J/OL]. 煤炭學(xué)報:1-19[2021-11-18]. https://doi. org/10. 13225/j. cnki. jccs. 2021. 1371.
WANG Yadong,ZHAO Lijuan,ZHANG Meichen. Research on self-adaptive height adjustment control strategy of shearer[J/OL]. Journal of China Coal Society:1-19[2021-11-18]. https://doi. org/10. 13225/j. cnki. jccs. 2021. 1371.
[19] 金鑫. 采煤機螺旋滾筒截割含夾矸煤巖雙向耦合作用機理及磨損特性研究[D]. 阜新:遼寧工程技術(shù)大學(xué),2020.
JIN Xin. Study on the two-way coupling mechanism and wear characteristics of shearer drumcutting coal-rock with gangue[D]. Fuxin:Liaoning Technical University,2020.
[20] 趙麗娟,聞首杰,劉旭南. 仿真顆粒半徑對模擬滾筒截割復(fù)雜煤層的影響研究[J]. 機械科學(xué)與技術(shù),2020,39(1):52-57.
ZHAO Lijuan,WEN Shoujie,LIU Xunan. The influence of simulated particle radius on complex coal seam of drum cutting[J]. Mechanical Science and Technology for Aerospace Engineering,2020,39(1):52-57.
[21] ZHAO L,ZHANG M,SHI B,et al. Comprehensive performance analysis of a shearer drum in a complicated seam based on discrete element method[A]. Proceedings of the Institution of Mechanical Engineers,Part C:Journal of Mechanical Engineering Science[C]. 2021. doi:10. 1177/09544062211026343.
[22] ZHAO L,ZHANG M,JIN X. Construction and application of a high precision 3D simulation model for geomechanics of the complex coal seam[J]. Scientific Reports,2021,11(1):1-16.
[23] 趙麗娟,范佳藝,劉雪景,等. 采煤機螺旋滾筒動態(tài)截割過程研究[J]. 機械科學(xué)與技術(shù),2019,38(3):386-391.
ZHAO Lijuan,FAN Jiayi,LIU Xuejing,et al. Exploring dynamic cutting process of shearer′s drum[J]. Mechanical Science and Technology for Aerospace Engineering,2019,38(3):386-391.
[24] 趙麗娟,王雅東,王斌. 含夾矸煤層條件下采煤機螺旋滾筒工作性能分析與預(yù)測[J]. 中國機械工程,2021,32(8):976-986.
ZHAO Lijuan,WANG Yadong,WANG Bin. Analysis and prediction of working performance of shearer spiral drum under gangue coal seam[J]. China Mechanical Engineering,2021,32(8):976-986.
[25] 趙麗娟,王雅東,劉旭南. 薄煤層采煤機強力螺旋滾筒設(shè)計研究[J]. 機械科學(xué)與技術(shù),2019,38(11):1712-1719.
ZHAO Lijuan,WANG Yadong,LIU Xunan. Design research for powerful screw drum of thin coal seam shearer[J]. Mechanical Science and Technology for Aerospace Engineering,2019,38(11):1712-1719.
[26] 張美晨,趙麗娟,王雅東. 基于CPS感知分析的煤巖截割狀態(tài)識別系統(tǒng)研究[J]. 煤炭學(xué)報,2021,46(12):4071-4087.
ZHANG Meichen,ZHAO Lijuan,WANG Yadong. Research on recognition system of coal-rock cutting state based on cps perception analysis[J]. Journal of China Coal Society,2021,46(12):4071-4087.
[27] 趙麗娟,范佳藝. 基于遺傳算法的采煤機螺旋滾筒多目標(biāo)優(yōu)化設(shè)計[J]. 中國機械工程,2018,29(5):591-596.
ZHAO Lijuan,FAN Jiayi. Shearer’s helical drum multi-objective optimization design based on GA[J]. China Mechanical Engineering,2018,29(5):591-596.
[28] 游航航,余敏建,呂艷,等. 基于改進灰狼算法優(yōu)化的UKF在空戰(zhàn)軌跡預(yù)測中的應(yīng)用[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2020(1):91-98.
YOU Hanghang,YU Minjian,Lü Yan,et al. Application of UKF optimized by improved gray wolf algorithm in air combat trajectory prediction[J]. Tactical Missile Technology,2020(1):91-98.
[29] 羅佳,唐斌. 新型灰狼優(yōu)化算法在函數(shù)優(yōu)化中的應(yīng)用[J]. 蘭州理工大學(xué)學(xué)報,2016,42(3):96-101.
LUO Jia,TANG Bin. Application of novel grey wolf optimization algorithm in function optimization[J]. Journal of Lanzhou University of Technology,2016,42(3):96-101.
[30] 劉棟. 基于改進灰狼算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的研究和應(yīng)用[D]. 合肥:安徽大學(xué),2019.
LIU Dong. Research andapplication of BP neural network based on improved grey wolf algorithm[D]. Hefei:Anhui University,2019.
[31] 王俊,馮軍,張戈,等. 基于改進灰狼優(yōu)化算法的醫(yī)學(xué)數(shù)據(jù)特征選擇應(yīng)用研究[J]. 河南大學(xué)學(xué)報(自然科學(xué)版),2020,50(5):570-578.
WANG Jun,FENG Jun,ZHANG Ge,et al. Application research of medical data feature selection based on improved grey wolf optimization algorithm[J]. Journal of Henan University(Natural Science),2020,50(5):570-578.
[32] 涂強. 灰狼優(yōu)化算法的改進及其在圖像分割中的應(yīng)用[D]. 鄭州:河南師范大學(xué),2017.
TU Qiang. The improvement of grey wolf optimization algorithm and its application in the image segmentation[D]. Zhengzhou:Henan Normal University,2017.
[33] 鄭小霞,錢軼群,王帥,等. 改進灰狼優(yōu)化模糊核聚類在風(fēng)電齒輪箱故障診斷中的應(yīng)用[J]. 機械傳動,2020,44(6):142-148.
ZHENG Xiaoxia,QIAN Yiqun,WANG Shuai,et al. Application of improved grey wolf optimization KFCM algorithm in fault diagnosis of wind turbine gearbox [J]. Journal of Mechanical Transmission,2020,44(6):142-148.
[34] 孫蓓婷,高超,張燕. 基于加權(quán)Topsis法綜合評價典型灘涂圍墾區(qū)土壤質(zhì)量演變[J]. 中國生態(tài)農(nóng)業(yè)學(xué)報,2018,26(2):284-293.
SUN Beiting,GAO Chao,ZHANG Yan. Soil quality evaluation in typical coastal reclamation zones based on weighted Topsis method[J]. Chinese Journal of Eco-Agriculture,2018,26(2):284-293.
[35] 王海艦,黃夢蝶,高興宇,等. 考慮截齒損耗的多傳感信息融合煤巖界面感知識別[J]. 煤炭學(xué)報,2021,46(6):1995-2008.
WANG Haijian,HUANG Mengdie,GAO Xingyu,et al. Coal-rock interface recognition based on multi-sensor information fusion considering pick wear[J]. Journal of China Coal Society,2021,46(6):1995-2008.
[36] 毛君,楊辛未,陳洪月,等. 不同煤巖硬度下采煤機豎直方向振動特性分析[J]. 機械強度,2019,41(1):20-25.
MAO Jun,YANG Xinwei,CHEN Hongyue,et al. Analysis of shearer vertical direction vibration characteristicsunder different coal and rock hardness[J]. Journal of Mechanical Strength,2019,41(1):20-25.
[37] 張強,劉志恒,王海艦,等. 基于截齒振動及溫度特性的煤巖識別研究[J]. 煤炭科學(xué)技術(shù),2018,46(3):1-9,18.
ZHANG Qiang,LIU Zhiheng,WANG Haijian,et al. Study on coal and rock identification based on vibration and temperature features of picks[J]. Coal Science and Technology,2018,46(3):1-9,18.
[38] 趙麗娟,孫國強. 基于雙向耦合的采煤機截割部振動特性研究[J]. 機械設(shè)計,2021,38(2):29-34.
ZHAO Lijuan,SUN Guoqiang. Research on the vibration characteristics of the shearer’s cutting section based on two-way coupling[J]. Journal of Machine Design,2021,38(2):29-34.
[39] 張虹. 雙局扇監(jiān)測控系統(tǒng)故障診斷數(shù)據(jù)處理方法研究[J]. 儀表技術(shù)與傳感器,2009(5):128-131.
ZHANG Hong. Research of malfunction diagnosing and data processing on monitoring control system for dual ventilation local-fans[J]. Instrument Technique and Sensor,2009(5):128-131.
[40] 趙麗娟,羅貴恒,劉旭南. 夾矸煤層采煤機斜切進刀過程滾筒載荷特性研究[J]. 煤炭科學(xué)技術(shù),2020,48(4):218-223.
ZHAO Lijuan,LUO Guiheng,LIU Xunan. Research on drum load characteristics in oblique cutting process of shearer with coal containing parting[J]. Coal Science and Technology,2020,48(4):218-223.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
防爆電機(2022年1期)2022-02-16 01:14:06
河北畫報(2021年2期)2021-05-25 02:07:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
山西大同大學(xué)學(xué)報(自然科學(xué)版)(2016年2期)2016-12-12 03:19:28
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18