飛機起落架液壓收放系統的故障程度診斷
2022-02-25 00:45:00豐贏政趙東標申珂楠趙世超
機械制造與自動化 2022年1期
豐贏政,趙東標,申珂楠,趙世超
(南京航空航天大學 機電學院,江蘇 南京 210016)
0 引言
起落架液壓收放系統是飛機的重要組成部分,其性能的好壞直接影響飛機的起降安全。從美國國家航空航天局(NASA)發布的報告中分析,起落架系統故障在所有飛機故障中占比較高,而與收放系統相關的故障占到起落架系統故障的35%左右[1]。從飛機液壓系統故障診斷的方法層面看,對故障的診斷大多數停留在依靠經驗和地面試驗上[2]。目前隨著人工智能的成熟,神經網絡在故障診斷方面的應用得到了飛速發展。林嘉琦等在航空發動機氣路故障診斷中運用深度信念網絡提升故障診斷的準確率[3]。金棋在直升機行星齒輪箱故障診斷中利用條件變分自編碼網絡(conditional variational autoencoder, CVAE)捕捉原始樣本的分布來生成大量有效樣本,以此提高故障診斷精度[4]。宋亞等在渦扇發動機剩余壽命預測中采用雙向長短期記憶神經網絡(bidirectional long short-term memory, BLSTM)捕捉狀態監測數據等時間序列與渦扇發動機壽命的復雜關系,提升預測精度[5]。
1 算法理論介紹
1.1 條件變分自編碼器
條件變分自編碼器的結構如圖1所示。左半部分表示編碼結構,右半部分表示解碼結構。
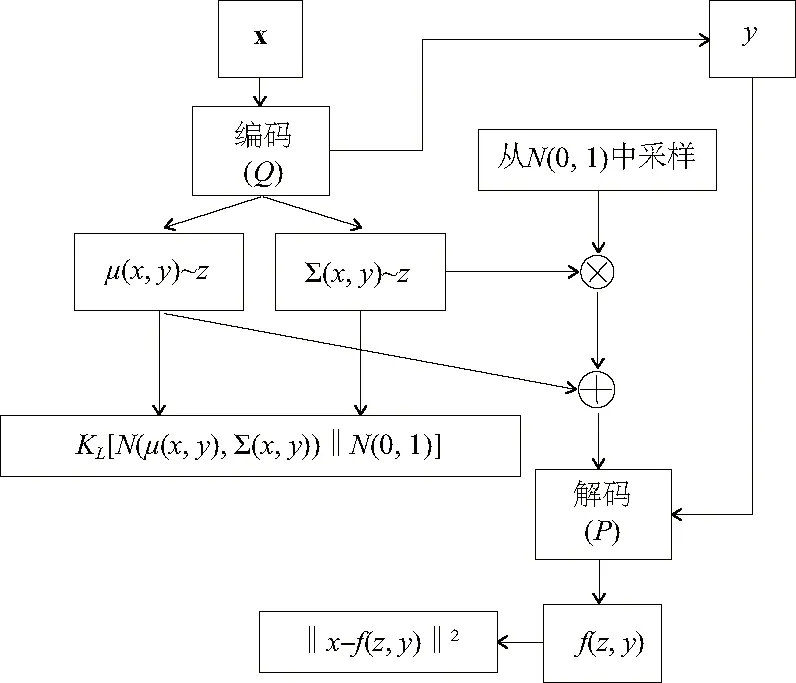
圖1 條件變分自編碼器結構
CVAE本質上是通過編碼改變輸入數據集的分布,使之成為已知的分布函數,再從這個分布函數中隨機取樣本,通過解碼過程生成符合輸入數據集規律的新數據。通常,數據集x的分布是未知且復雜的,而任何復雜分布都可以通過已知的簡單分布映射得到。CVAE編碼的目的就是改變輸入數據集x的分布,使之盡可能地貼合已知分布,再從已知分布中采樣,通過解碼部分生成數據。在編碼與解碼的過程加入標簽y,可使模型根據標簽生成不同類別的數據。
輸入數據集x和標簽y通過編碼過程Q映射到隱變量z,其中編碼后產生的數據μ(x,y)和∑(x,y)分別代表隱變量z的均值和方差。假設使之貼合的已知分布為標準正態分布N(0,1),通過計算隱變量z與標準正態分布N(0,1)的KL離散度,可知兩個分布之間的差異,并由此優化編碼器。編碼器的損失函數如式(1)所示。
le=KL[N(μ(x,y),∑(x,y))‖N(0,1)]=
(1)
解碼部分將隱變量z和標簽y通過解碼過程P生成重構數據f(z,y),再計算f(z,y)與輸入x的平方差來優化解碼器部分。其中z由式(2)獲得,解碼器損失函數如式(3)所示。
z=μ(x,y)+ε·∑(x,y)
(2)
ld=[x-f(z,y)]2
(3)
CVAE損失函數如式(4)所示。
li=le+ld
(4)
CVAE模型訓練完成后,可將模型的解碼部分作為生成模型,將N(0,1)中隨機采樣的數據與標簽y相組合來生成與訓練數據集類似的數據。
1.2 BLSTM神經網絡
為了充分利用輸入數據的前后依賴關系,本文選用雙向長短期記憶神經網絡(BLSTM)進行故障程度診斷。BLSTM是在長短期記憶神經網絡(LSTM)的基礎上發展而來,由兩層方向相反的LSTM構成。它既能避免傳統循環神經網絡在處理時間序列上距離較遠節點時帶來的梯度消失或者梯度膨脹問題,又能解決LSTM捕捉不了時間序列的反向規律問題。LSTM神經網絡的細胞結構如圖2所示。
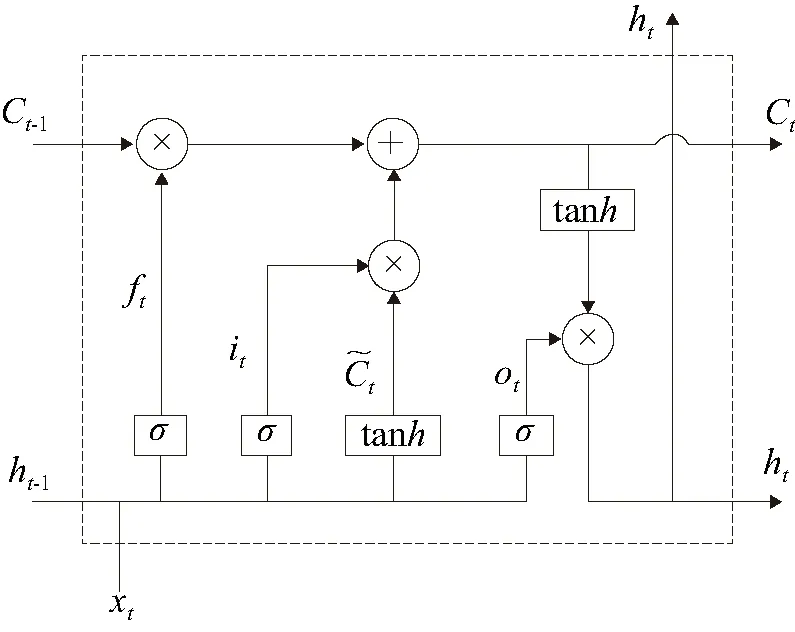
圖2 LSTM細胞結構
LSTM細胞結構相較與傳統循環神經網絡加入了忘記門、輸入門和輸出門,其公式如式(5)-式(10)所示。
ft=σ(Wfxt+Ufht-1+bf)
(5)
it=σ(Wixt+Uiht-1+bi)
(6)
(7)
(8)
ot=σ(Woxt+Uoht-1+bo)
(9)
ht=ot×tanh(Ct)
(10)

BLSTM展開結構如圖3所示。BLSTM模型計算公式如式(11)-式(13)所示。
ht=LSTM(xt,ht-1)
(11)
(12)
(13)

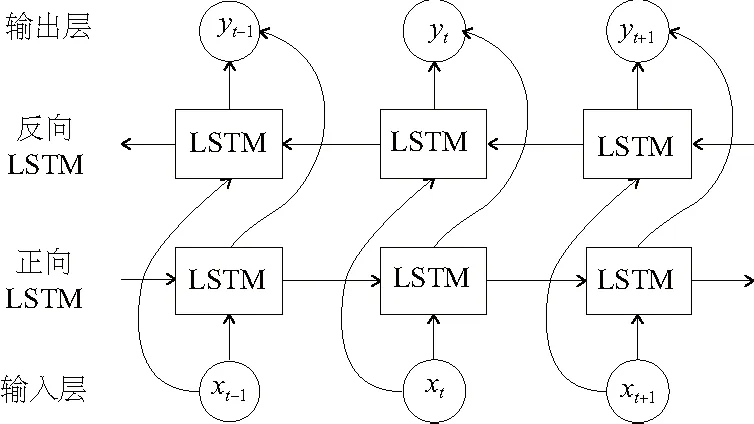
圖3 BLSTM展開結構
BLSTM的損失函數為
(14)

2 建模與仿真
圖4為某型飛機起落架液壓收放系統AMESim仿真模型[6]。該仿真模型包括收放作動模塊、鎖作動模塊和液壓源模塊。模型具體參數設置來自文獻[7-8]。選取收放作動筒內泄漏進行不同故障程度仿真來驗證算法有效性。故障程度設置如表1所示。

圖4 某型飛機起落架液壓收放系統AMESim仿真模型

表1 故障程度設置
將仿真時長設置為40s,其中0~3s開始仿真,3~14s起落架收上,到位后上鎖,20s開始解鎖,解鎖后起落架立即放下,40s仿真停止。本文將作動筒有桿腔壓力作為故障程度識別數據。
如表1所示,根據故障程度劃分了多個分類區間。仿真時,每個分類區間等間距取100個數值。調整故障參數進行多次故障仿真,根據分類區間得到6組仿真數據,作為訓練集數據,每組數據作為一個類別。每個分類區間隨機取30個與訓練集不同的數值進行仿真,得到6組仿真數據,作為測試集數據。
3 CVAE-BLSTM故障程度診斷
3.1 數據預處理
將數據的采樣時間設為0.1s,即每條曲線采樣400個數據點。每個分類區間各取1條曲線組成如圖5所示。

圖5 不同故障程度有桿腔壓力曲線
從圖5可看出,10~14s曲線有一個小凸起,表明起落架收上到位后,有桿腔壓力達到最大值。而不同故障程度的作動筒內泄漏到達的壓力最大值的時間不同,泄漏程度大的有更明顯的延時現象。14~21s壓力曲線有不同程度的下降,表明在換向閥中位時,出現高壓油腔向低壓油腔泄漏的現象,且泄漏程度越大,壓力下降得越快。25~33s壓力曲線接近于0,表明起落架放下到位。而這段時間也出現泄漏延時現象。本文將40s曲線作故障程度診斷模型的訓練數據,共400個數據點。
為了加快模型訓練速度和收斂速度,采用式(15)進行歸一化處理。
(15)
式中:xi為數據曲線中第i個數據點;xmax和xmin為數據曲線中最大值和最小值;xnorm為xi歸一化后的值。
3.2 CVAE-BLSTM模型
CVAE-BLSTM模型結構如圖6所示。
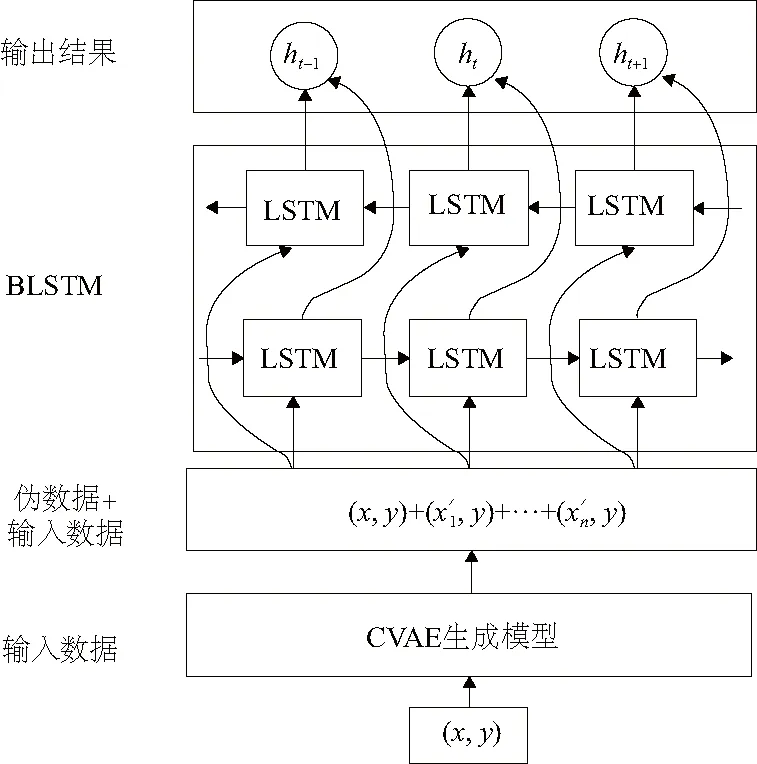
圖6 CVAE-BLSTM模型結構
本文先用訓練集訓練CVAE模型,再截取CVAE的解碼器作為生成模型,與BLSTM相結合,混合成CVAE-BLSTM模型,并再次使用訓練集訓練。輸入帶標簽的原始數據后,CVAE生成模型將根據標簽生成n個與輸入標簽同一類型的偽數據,并將n個偽數據與原始數據一同輸入BLSTM訓練該模型,取BLSTM最后一個時間步輸出節點作為最終結果與輸入標簽相比較,更新網絡權值。
4 結果分析
4.1 模型參數設定
CVAE-BLSTM模型主要參數設置如表2所示。
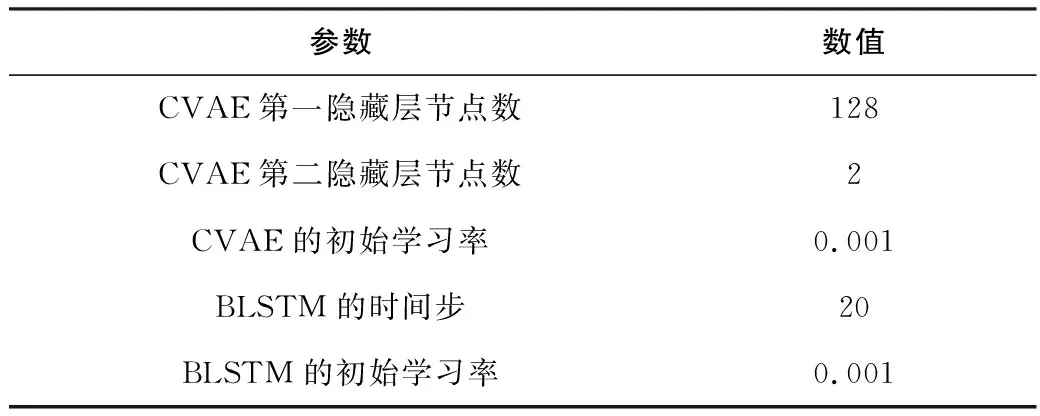
表2 模型主要參數設置
4.2 與其他模型對比
將CVAE-BLSTM的測試集準確率與BP神經網絡、CVAE-BP神經網絡、CNN[9]模型、CVAE-CNN模型、LSTM[10]模型、CVAE-LSTM模型等其他算法進行比較,結果如表3所示。

表3 與其他模型對比
BP神經網絡采用雙隱藏層,sigmoid激活函數;CNN訓練時將輸入數據reshape組成20×20二維數據,并采用兩個卷積層、兩個池化層和一個全連接層組成;LSTM模型參數與本文BLSTM中的LSTM單元設置相同。各CVAE混合模型的CVAE參數設置相同。
由表3對比結果可知,CNN、LSTM和BLSTM混合了CVAE生成模型后,測試集準確率有明顯上升,而對BP神經網絡的提升不大,說明CVAE可以提升其他深度學習算法的泛化能力,但對傳統機器學習算法提升不明顯。CVAE-BLSTM模型與CVAE-LSTM模型的測試集準確率大于CVAE-CNN模型,說明循環神經網絡比卷積神經網絡更適合處理時間序列數據。本文所提的CVAE-BLSTM模型較CVAE-LSTM提升了4%,較BLSTM提升了10%,這得益于BLSTM模型對數據進行雙向學習能力和CVAE生成模型偽數據生成能力。這兩項能力增加了模型診斷的準確率與泛化能力,使模型具有高準確率和對未仿真故障參數帶的學習診斷能力。
5 結語
針對飛機起落架液壓收放系統故障樣本少,故障數據時域上的高相關性以及故障數據集樣本不足的問題,本文提出一種基于CVAE-BLSTM的混合模型來進行故障程度診斷。首先建立某型飛機起落架液壓收放系統AMESim仿真模型,植入故障,提取故障數據,其次利用故障樣本訓練CVAE生成模型,最后組成CVAE-BLSTM混合模型進行故障程度診斷。與其他算法相比,CVAE-BLSTM混合模型具有高準確率與強泛化能力,可對飛機起落架液壓收放系統故障程度進行有效診斷。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
核科學與工程(2015年4期)2015-09-26 11:59:03
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34