220kV GIL 復(fù)雜殼體結(jié)構(gòu)振動傳播特性分析
2022-02-27 11:24:08杜志葉郝兆揚郝乾肖湃王永君黃文雄
湖南大學(xué)學(xué)報(自然科學(xué)版) 2022年2期
杜志葉,郝兆揚?,郝乾,肖湃,王永君,黃文雄
(1.武漢大學(xué)電氣與自動化學(xué)院,湖北武漢 430072;2.武漢朗德電氣有限公司,湖北武漢 430205;3.湖北工業(yè)大學(xué)電氣與電子工程學(xué)院,湖北武漢 430068)
氣體絕緣金屬封閉輸電線路(gas-insulated transmission line,GIL)因其輸電容量大、損耗低、運行維護(hù)方便等優(yōu)點[1-3],可有效滿足城市景觀帶建設(shè)、清潔能源外送、可再生能源消納等場景下的電能輸送需求[4],對我國碳達(dá)峰、碳中和目標(biāo)的實現(xiàn)具有重要作用.受限于當(dāng)前技術(shù)水平,采用模塊化方式生產(chǎn)組裝的GIL 內(nèi)部往往會出現(xiàn)一些不可避免的隱性絕緣缺陷[5-6],這些缺陷可能會引發(fā)絕緣故障而導(dǎo)致?lián)舸?].對于長距離GIL,當(dāng)擊穿發(fā)生時,需要快速、準(zhǔn)確地定位擊穿位置,以便及時更換損壞管段.目前,GIL 擊穿故障定位方法主要包括振動法、超聲波法以及接地線電流法[8],因為GIL 擊穿放電產(chǎn)生的聲振動信號主要位于可聽聲頻段內(nèi),振動加速度傳感器在此頻段內(nèi)靈敏度高,且安裝方便、經(jīng)濟(jì)性好[9],因此振動法在GIL擊穿故障定位中得到了廣泛的應(yīng)用.
近兩年來,隨著無錫、南通以及武漢等地的GIL工程陸續(xù)開工建設(shè)或建成投運,我國的長距離城市GIL工程已進(jìn)入快速發(fā)展期.這些長距離城市GIL工程均以管廊的形式埋設(shè)于地下,受城市復(fù)雜地形條件的影響,上下起伏頻繁,存在大量的伸縮節(jié)、彎管等復(fù)雜殼體結(jié)構(gòu).振動法主要監(jiān)測GIL 內(nèi)部發(fā)生絕緣故障時產(chǎn)生并沿殼體傳播的振動信號,出于經(jīng)濟(jì)性考慮,在GIL 殼體上安裝的振動加速度傳感器間隔一般較長.對于城市GIL,兩個傳感器間可能會存在多個復(fù)雜殼體結(jié)構(gòu),這些結(jié)構(gòu)會使經(jīng)過的振動信號產(chǎn)生顯著的時延和衰減,嚴(yán)重影響基于時差或幅值的故障定位結(jié)果[10].為提高GIL 狀態(tài)監(jiān)測水平,避免故障點定位不準(zhǔn)導(dǎo)致的檢修周期延長以及誤拆正常管段對GIL 造成的二次破壞,應(yīng)對振動信號經(jīng)過GIL復(fù)雜殼體結(jié)構(gòu)的傳播特性進(jìn)行研究,所得研究成果可為現(xiàn)有振動故障定位算法的改進(jìn)提供理論依據(jù)與技術(shù)數(shù)據(jù),進(jìn)一步提高故障定位結(jié)果的精確性,有利于后續(xù)長距離城市GIL管廊工程的建設(shè).
在GIS/GIL 振動特性研究方面,日本學(xué)者Okutsu率先提出利用振動法監(jiān)測GIS 內(nèi)部的機械故障與放電故障[11];屈斌等人通過實驗采集了GIS 不同機械故障與局放故障下的振動加速度信號[12];薛建議等人采用有限元法仿真了特高壓GIS 不同位置發(fā)生局部放電時超聲振動信號的傳播特性[13];騰云、劉通等人研究了GIL 發(fā)生擊穿性放電時的聲振動特性以及基于可聽聲信號的擊穿故障定位方法[14-15];劉云鵬等人通過擊穿故障定位試驗,研究了超聲振動信號在特高壓GIL 中傳播的衰減特性[16].目前GIS/GIL 振動特性的研究尚局限于母線直管段,鮮有振動信號經(jīng)過GIL 伸縮節(jié)、氣隔單元等復(fù)雜殼體結(jié)構(gòu)傳播特性相關(guān)的研究.
綜上所述,本文提出了一種基于聲-結(jié)構(gòu)耦合的GIL 振動傳播特性有限元仿真方法[17],研究了不同激勵方式下振動信號在GIL 殼體中的傳播特性,并在220 kV 真型GIL 上開展管壁振動傳播特性試驗,獲得了振動信號經(jīng)過220 kV GIL 各型復(fù)雜殼體結(jié)構(gòu)的典型波速和時延情況,通過仿真與試驗結(jié)果對比,驗證了該仿真方法的準(zhǔn)確性.
1 GIL聲-結(jié)構(gòu)耦合仿真原理及方法
流體中的聲波和固體中的應(yīng)力波都屬于機械波,是振動在介質(zhì)中的傳播形式.因為GIL 同時包含流體域和固體域,因此振動在GIL 中的傳播涉及聲學(xué)與結(jié)構(gòu)力學(xué)兩物理場.考慮到GIL 伸縮節(jié)、氣隔單元等復(fù)雜殼體結(jié)構(gòu)的材質(zhì)與直管段不同,同時又包含大量的流-固交界面,振動信號經(jīng)過這些結(jié)構(gòu)時會發(fā)生極為復(fù)雜的折射、反射以及波形轉(zhuǎn)換現(xiàn)象,其傳播過程難以通過理論解析計算.因此,本文采用數(shù)值計算方法研究振動在GIL中的傳播過程.
1.1 計算原理
1.1.1 聲學(xué)波動方程
聲學(xué)方程來源于流體力學(xué),完整的流體方程由質(zhì)量守恒方程、動量守恒方程、能量守恒方程以及本構(gòu)關(guān)系組成,方程如式(1)所示.
其中,ρ為介質(zhì)密度,kg/m3;l為流體質(zhì)點的振動速度,m/s;T為溫度,K;τmu為黏性應(yīng)力張量,Pa;I為單位矩陣;F為體積力,N/m3;Cp為定壓比熱容,J/(kg·K);p為壓強,Pa;α0為熱擴(kuò)散系數(shù),m2/s;k為導(dǎo)熱系數(shù),W/(m·K);Q為流體的內(nèi)熱源,W/m3;t為時間,s.
上述方程描述了流體力學(xué)中速度場l、壓強p以及溫度T之間的關(guān)系.對于聲學(xué)而言,無需求解上述諸多復(fù)雜變量,只需要求解與聲學(xué)有關(guān)的壓力變化即可,因此一般都會根據(jù)問題特性對流體方程進(jìn)行一定的簡化.本文在仿真計算前對GIL 內(nèi)部的介質(zhì)、聲波等進(jìn)行了如下的簡化假設(shè):
①認(rèn)為在GIL 流體域中傳播的聲波屬于線性聲學(xué)的范疇,進(jìn)而可以將上述方程中的介質(zhì)密度ρ、質(zhì)點振動速度l、壓強p以及溫度T拆成平均不變的穩(wěn)態(tài)值x0和交變的擾動值xt,其中擾動值遠(yuǎn)小于穩(wěn)態(tài)值;
②認(rèn)為SF6在GIL 中是不流動的,即流體質(zhì)點的振動速度l的穩(wěn)態(tài)量l0為0;
③認(rèn)為SF6為理想流體,其黏度很小可以忽略,聲波在SF6中傳播時不會產(chǎn)生熱耗損,可以忽略流體方程中的粘度項;
④認(rèn)為整個體系絕熱,不與外界進(jìn)行熱量交換,可以忽略流體方程中的溫度項.
通過上述簡化,可以得到描述聲壓pt、介質(zhì)質(zhì)點振動速度變化量lt和介質(zhì)密度變化量ρt這3 個基本物理量之間關(guān)系的連續(xù)性方程、運動方程和物態(tài)方程[18].將連續(xù)性方程兩邊對時間t求偏導(dǎo)后與物態(tài)方程一起代入運動方程,即可得到時域壓力聲學(xué)波動方程,如式(2)所示,可以使用該方程描述聲波在GIL流體域中的運動過程.

式中:ρ0為介質(zhì)密度,kg/m3;pt為聲壓,Pa,即大氣壓受到聲波擾動后的變化量;c為聲波在介質(zhì)中的傳播速度,m/s.
1.1.2 三維線彈性波方程
將GIL 的固體域看作線彈性體,用彈性動力學(xué)模型來描述應(yīng)力波在其中的傳播過程.位移、應(yīng)力、應(yīng)變是彈性動力學(xué)中的3 個基本物理量,它們之間由運動微分方程、物理方程、幾何方程相互關(guān)聯(lián)[19].
運動微分方程如式(3)所示,它描述了彈性體的應(yīng)力分量和位移分量之間的變化關(guān)系,其中σ表示應(yīng)力張量,Pa;F表示體積力矢量,N/m3;u表示位移矢量,m;ρ表示固體介質(zhì)密度,kg/m3.

物理方程如式(4)所示,它描述了彈性體的應(yīng)力分量和應(yīng)變分量之間的變化關(guān)系,其中ε表示應(yīng)變張量;C為材料的彈性參數(shù)矩陣,其為6階對稱方陣,可以通過Lame 常數(shù)λ和μ、體積模量K和剪切模量G或楊氏模量E和泊松比υ來表示.

幾何方程如式(5)所示,它描述了彈性體的位移分量和應(yīng)變分量之間的變化關(guān)系,其中?u表示位移矢量的梯度,其為一個二階張量,上標(biāo)T 表示二階張量的轉(zhuǎn)置.

忽略運動微分方程中的體積力項,根據(jù)物理方程將運動微分方程中的應(yīng)力分量表示為應(yīng)變分量,再通過幾何方程將應(yīng)變分量轉(zhuǎn)化為位移分量,即可以得到直角坐標(biāo)系中均勻、各向同性、線彈性固體介質(zhì)中的三維線彈性波方程,如式(6)所示:

1.1.3 聲-結(jié)構(gòu)耦合關(guān)系
振動信號在GIL 流體域中傳播時只包含縱波,在GIL 固體域中傳播時同時包含縱波和橫波.因此,當(dāng)振動信號到達(dá)GIL流-固交界面時,會發(fā)生相應(yīng)的折射、反射及波形轉(zhuǎn)換,其過程遵循波的折射反射定律.
在GIL 流-固交界面上,流體壓力以法向單位面積載荷作用于固體;固體沿交界面法向的加速度作用于流體,相當(dāng)于法向加速度產(chǎn)生聲源,如圖1 所示.兩者間的耦合為雙向耦合,關(guān)系如式(7)所示,其中ρc為流體介質(zhì)密度,kg/m3;pt為聲壓,Pa;α為加速度矢量,m/s2;FA為交界面處的單位面積載荷,Pa;n表示法向單位矢量.
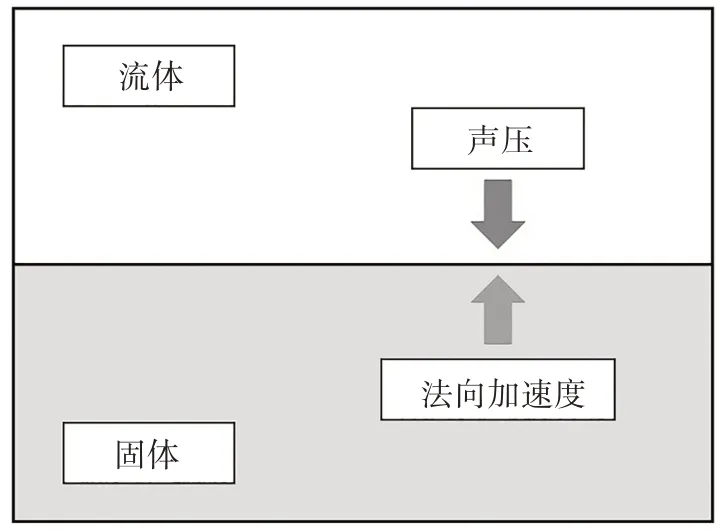
圖1 流-固交界面的耦合關(guān)系示意圖Fig.1 Schematic diagram of coupling relationship of fluid-solid interface
1.2 220 kV GIL仿真模型及邊界條件設(shè)置
1.2.1 幾何模型
根據(jù)220 kV GIL 的結(jié)構(gòu)尺寸,對其直管段、伸縮節(jié)單元、盆式絕緣子及氣隔單元、支架單元建立相應(yīng)的三維仿真模型.
伸縮節(jié)單元仿真模型如圖2 所示,其主要由中間的波紋管以及四周的限位拉桿組成.對于單伸縮節(jié)側(cè)面安裝的銅/不銹鋼箔軟連接,由于其由無數(shù)厚度為0.05 mm 的金屬箔組成,難以進(jìn)行仿真建模,因此對這一部分進(jìn)行簡化.
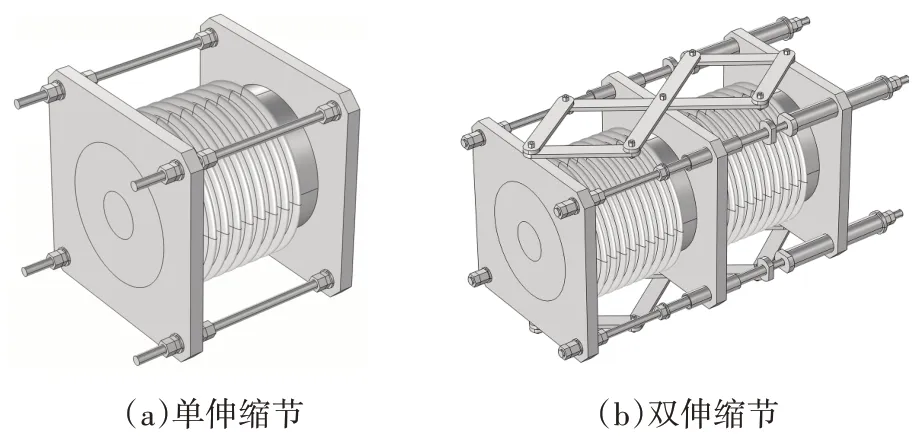
圖2 220 kV GIL伸縮節(jié)三維仿真模型Fig.2 Three-dimensional simulation model of 220 kV GIL expansion joint
氣隔單元仿真模型如圖3 所示,其主要由兩側(cè)直管法蘭、盆式絕緣子、導(dǎo)體以及導(dǎo)體屏蔽層組成.盆式絕緣子采用弧形結(jié)構(gòu),相比于先前研究中常用的簡化錐形結(jié)構(gòu)更加接近于實際.
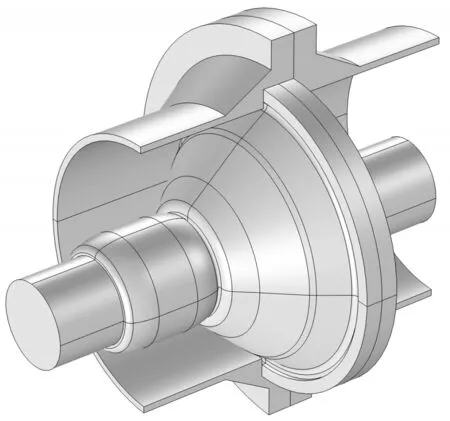
圖3 220 kV GIL氣隔單元三維仿真模型Fig.3 Three-dimensional simulation model of 220 kV GIL gas basin insulators
支架單元仿真模型如圖4 所示,包括活動支架與固定支架兩種.
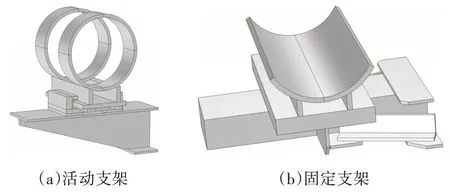
圖4 220 kV GIL支架單元三維仿真模型Fig.4 Three-dimensional simulation model of 220 kV GIL support unit
1.2.2 邊界條件
實際的GIL 長度很長,在構(gòu)建仿真模型時考慮到GIL 結(jié)構(gòu)的重復(fù)性,往往只針對其中的一小段進(jìn)行建模.當(dāng)GIL 內(nèi)的振動信號傳播到模型兩側(cè)的邊界時,不應(yīng)該發(fā)生反射,因此模型的邊界應(yīng)該完全吸收傳播過來的波,通過在模型兩側(cè)設(shè)置無限長邊界條件來模擬這一特征.
振動信號會隨傳播距離的增加而逐漸衰減,主要的衰減形式包括散射衰減、介質(zhì)的吸收衰減以及擴(kuò)散衰減[20].在仿真過程中,認(rèn)為GIL 內(nèi)各介質(zhì)為均勻介質(zhì)而忽略散射衰減,同時考慮到振動在SF6中的傳播距離很短而忽略SF6氣體的吸收衰減.振動信號在GIL 固體域中的衰減使用阻尼描述.因為模擬振動信號在GIL 中的傳播過程是一個時域問題,因此采用瑞利阻尼的方式模擬GIL 金屬殼體中的阻尼.金屬材料的阻尼比普遍較低,可以認(rèn)為其為恒定阻尼比.鋁的阻尼比在0.000 2-0.002之間,本文在仿真中取近似值0.000 5.
在GIL 仿真模型內(nèi)部的流-固交界面添加聲-結(jié)構(gòu)耦合邊界條件.同時將GIL 金屬殼體表面作為模型的外邊界,設(shè)置沒有約束和載荷的自由邊界條件.這樣無需對GIL 外部的空氣域進(jìn)行建模,大幅降低了模型的計算量.
2 振動在GIL金屬殼體中的傳播特性
根據(jù)上述聲-結(jié)構(gòu)耦合有限元仿真方法建立GIL 直管段仿真模型,沿GIL 外壁徑向施加沖擊激勵,研究振動信號在GIL金屬殼體中的傳播特性.
施加激勵3.5 ms后,GIL 表面各點的位移變形場如圖5所示;距離激勵源6 m和16 m處探針得到的振動加速度時域波形如圖6 所示.因為當(dāng)前振動在線監(jiān)測系統(tǒng)均通過GIL 金屬外殼頂部放置的單軸加速度傳感器監(jiān)測徑向振動信號,因此圖6 中的加速度是GIL金屬外殼頂部各點加速度的徑向分量.
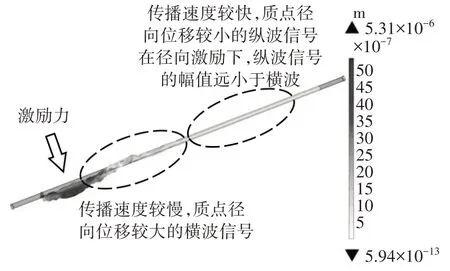
圖5 GIL表面各點位移變形場圖(徑向激勵)Fig.5 Displacement and deformation diagram of GIL surface(Radial excitation)
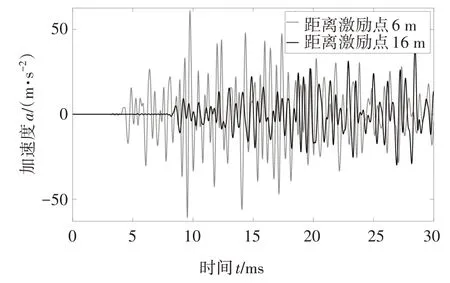
圖6 探針點振動加速度時域波形圖(徑向激勵)Fig.6 Time domain waveform of probe point vibration acceleration(Radial excitation)
由理論可知,在GIL 管壁中傳播的振動信號包含縱波和橫波,根據(jù)兩者質(zhì)點振動方向與波傳播方向之間的關(guān)系,由圖5和圖6可以得到以下結(jié)論:
①探針點的時域波形由前方傳播速度較快的縱波和后方傳播速度較慢的橫波組成,縱波和橫波波形的區(qū)分隨著傳播距離的增大而愈加明顯.
②沿徑向激勵GIL 金屬殼體時,激勵方式以激勵橫波為主,此時橫波的徑向加速度幅值遠(yuǎn)高于縱波.圖6 中位于時域波形前方的縱波幅值很小,僅為0.3 m/s2左右.
③根據(jù)縱波與橫波的傳播機理,橫波媒質(zhì)質(zhì)點的振動會與周圍介質(zhì)發(fā)生相互作用,產(chǎn)生較大的徑向振動.對于GIL 金屬殼體而言,管壁中傳播的徑向振動會與GIL 支架單元以及管內(nèi)的SF6氣體發(fā)生相互作用而輻射聲能,造成能量衰減.相比之下,縱波在管壁中傳播時,其徑向位移與軸向位移相比要小得多.因此,橫波相比于縱波衰減得更快.
對該GIL 直管段模型金屬殼體軸向施加沖擊激勵,其余條件保持不變,施加激勵3.5ms 后,GIL表面各點的位移變形場如圖7 所示;距離激勵源6 m 和16 m 處探針得到的振動加速度時域波形如圖8 所示.

圖8 探針點振動加速度時域波形圖(軸向激勵)Fig.8 Time domain waveform of probe point vibration acceleration(Axial excitation)
對比徑向與軸向激勵下GIL 表面各點位移變形場圖與探針點徑向振動加速度時域波形圖可以看出,施加軸向激勵時,探針點加速度徑向分量中橫波幅值明顯降低,而縱波幅值相對于橫波有所增加,證明軸向激勵以激勵縱波為主.
根據(jù)仿真結(jié)果,計算得到縱波在GIL 直管段的波速為6 211.18 m/s,接近其在鋁合金中的理論速度6 272.6 m/s;橫波在GIL 直管段的波速為3 115.26 m/s,接近其在鋁合金中的理論速度3 159.7 m/s.
3 試驗研究與仿真對比
3.1 試驗布置
為準(zhǔn)確測試振動經(jīng)過GIL 復(fù)雜殼體結(jié)構(gòu)的傳播特性,在南通220kV GIL 現(xiàn)場開展了GIL 管壁振動傳播特性試驗.試驗時GIL 已完成充氣,尚未加壓投入使用,因此GIL 殼體不存在電磁力以及磁致伸縮引起的持續(xù)低頻振動,進(jìn)一步降低了試驗干擾.
在南通試驗中,考慮到在真型GIL 上進(jìn)行擊穿試驗可行性低,同時真型GIL 整體長度長,擊穿位置不確定,難以準(zhǔn)確研究振動經(jīng)過GIL 特定結(jié)構(gòu)的傳播特性,因此使用壓電式?jīng)_擊力錘敲擊GIL 外殼的方式產(chǎn)生激勵聲源,這也是在GIS/GIL 擊穿故障定位研究中模擬擊穿聲源的常用方式[21-22].
南通GIL 工程全線安裝振動故障定位在線監(jiān)測系統(tǒng),該系統(tǒng)使用量程為5g的IEPE 型單軸振動加速度傳感器監(jiān)測GIL 發(fā)生絕緣故障時產(chǎn)生的徑向振動信號,并基于時差法進(jìn)行故障定位.因為振動波陣面到達(dá)GIL 流-固交界面時主要對殼體施加徑向激勵,導(dǎo)致沿GIL 殼體傳播的振動信號徑向分量中的橫波幅值遠(yuǎn)大于縱波,因此該系統(tǒng)使用橫波作為故障定位的判斷依據(jù).由于系統(tǒng)未考慮GIL 復(fù)雜殼體結(jié)構(gòu)對振動信號產(chǎn)生的影響,因此內(nèi)置的振動波速統(tǒng)一為1 900 m/s,低于橫波在GIL外殼中的波速.
在試驗中使用與振動故障定位在線監(jiān)測系統(tǒng)同一型號的振動加速度傳感器,試驗布置如圖9 所示.試驗過程中,分別將傳感器安裝在GIL 單伸縮節(jié)、雙伸縮節(jié)、氣隔單元等復(fù)雜殼體結(jié)構(gòu)的兩側(cè),通過在不同位置敲擊GIL殼體產(chǎn)生激勵,測取經(jīng)過GIL各結(jié)構(gòu)前后的振動信號.
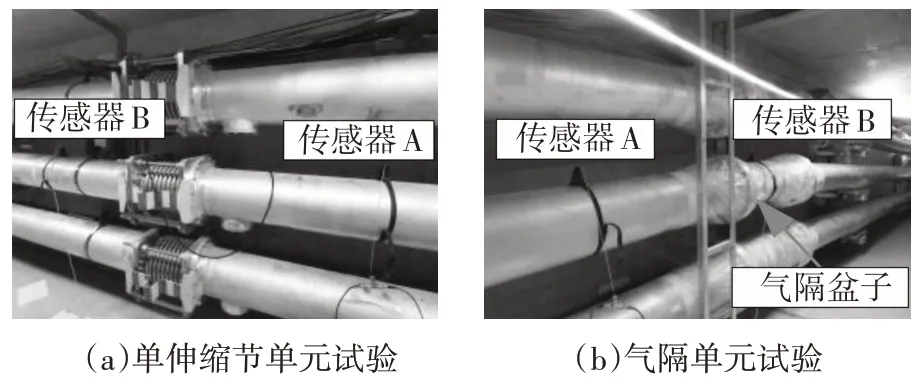
圖9 試驗布置示意圖Fig.9 Schematic diagram of test layout
3.2 220 kV GIL復(fù)雜殼體結(jié)構(gòu)振動傳播特性
3.2.1 試驗測量設(shè)備噪聲分析
未加載敲擊信號時,GIL表面?zhèn)鞲衅鞑杉降脑肼曅盘柸鐖D10 所示,其主要包括環(huán)境背景噪聲,傳感器、信號調(diào)理器等設(shè)備的引入噪聲以及信號采集裝置的本底噪聲等.測量得到的噪聲信號的平均幅值為0.03 V,換算可得噪聲信號的幅值約為0.3 m/s2.
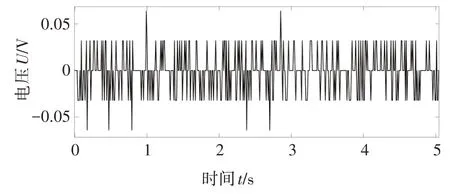
圖10 未加載激勵時傳感器測得的噪聲信號時域波形圖Fig.10 Time domain waveform of noise signal measured by the sensor when the excitation is not loaded
噪聲信號頻域波形圖如圖11 所示,可見噪聲信號主要集中在0~2 000 Hz的低頻段以及20 kHz以上的高頻段,在330 kHz 附近的噪聲振幅最大.在后續(xù)分析中,使用低通濾波器對波形進(jìn)行濾波處理,以消除高頻噪聲信號對有效振動信號產(chǎn)生的影響.
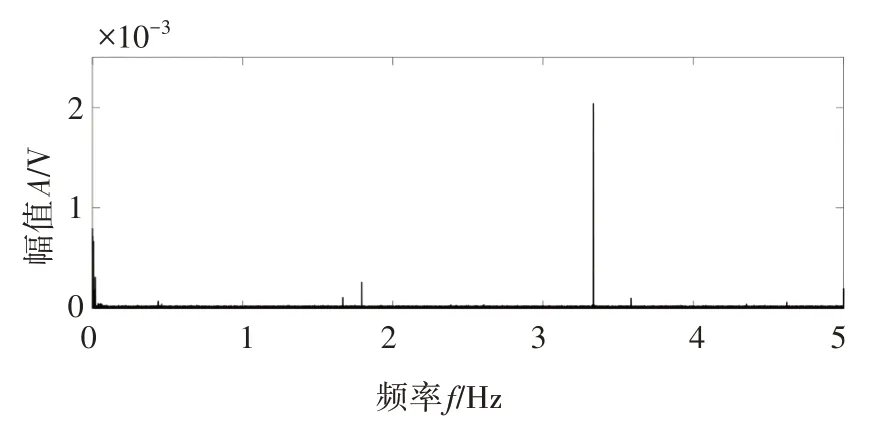
圖11 未加載激勵時傳感器測得的噪聲信號頻域波形圖Fig.11 Frequency domain waveform of noise signal measured by the sensor when the excitation is not loaded
3.2.2 振動在GIL直管段的傳播特性
在GIL 直管段兩側(cè)安裝傳感器,根據(jù)兩傳感器波形首波波峰時刻的差值計算振動信號在兩傳感器間的傳播速度.分別改變兩傳感器間的距離、激勵方式、傳感器固定位置等進(jìn)行不同工況的試驗,試驗結(jié)果如下表1所示.
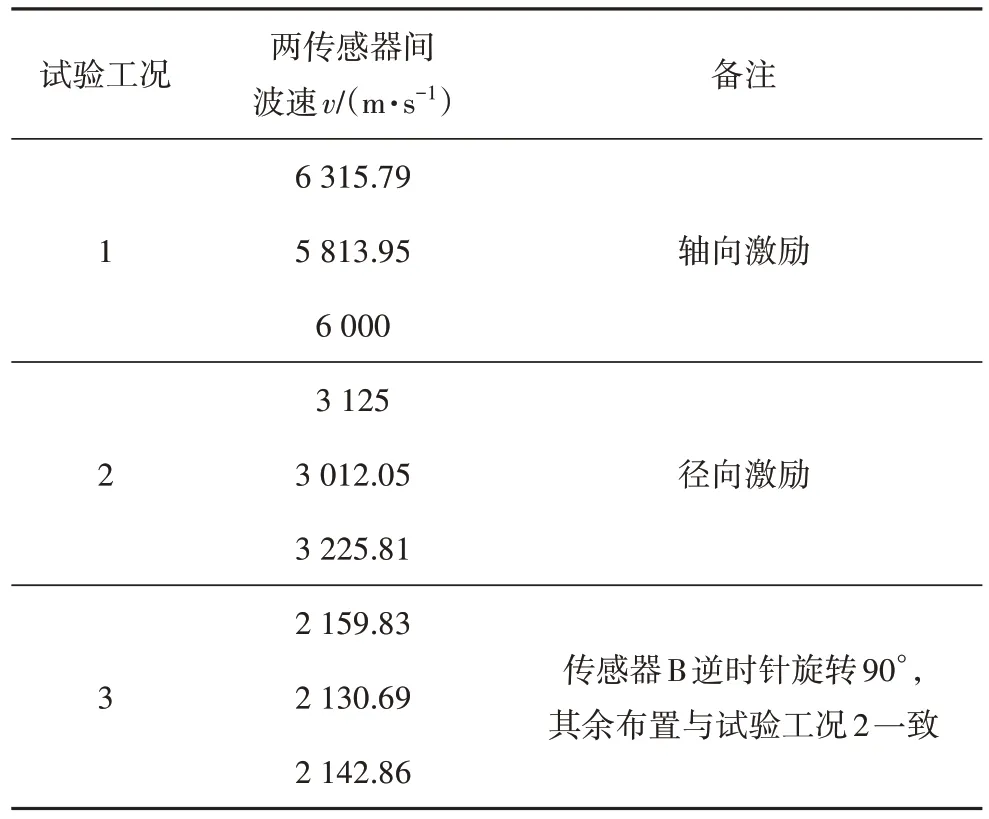
表1 220kV GIL直管段實測典型波速Tab.1 Typical wave velocity measured by 220kV GIL straight pipe section
從表1 可以看出,施加以激勵縱波為主的軸向激勵時,位于波形前方的縱波信號幅值較大,此時根據(jù)兩傳感器測得波形首波波峰對應(yīng)時刻的差值計算得到的波速,接近縱波在鋁合金中的理論速度;施加以激勵橫波為主的徑向激勵時,位于時域波形前方的直達(dá)縱波的幅值很小,埋沒在噪聲信號中無法區(qū)分,此時傳感器測得波形中的首波實際上是位于縱波之后的橫波,因此計算得到的波速接近橫波在鋁合金中的理論速度.將試驗結(jié)果與上一節(jié)中GIL 直管段振動波速仿真結(jié)果進(jìn)行比較,可見仿真結(jié)果與試驗結(jié)果基本吻合.
對比試驗工況2 和3 可以看出,當(dāng)激勵點、傳感器A、傳感器B 不處于同一條與軸線平行的直線上時,橫波的傳播距離實際上大于兩傳感器間的直線距離.因此在實際工程布置中振動故障定位在線監(jiān)測系統(tǒng)的所有傳感器均安裝在GIL 殼體的頂部位置,處于同一條與軸線平行的直線上.
3.2.3 振動經(jīng)過GIL復(fù)雜殼體結(jié)構(gòu)的傳播特性
在GIL 各復(fù)雜殼體結(jié)構(gòu)兩側(cè)安裝傳感器,使用沖擊力錘沿徑向敲擊GIL 外殼,記錄振動信號經(jīng)過GIL復(fù)雜殼體結(jié)構(gòu)前后的波形信號,如圖12所示.
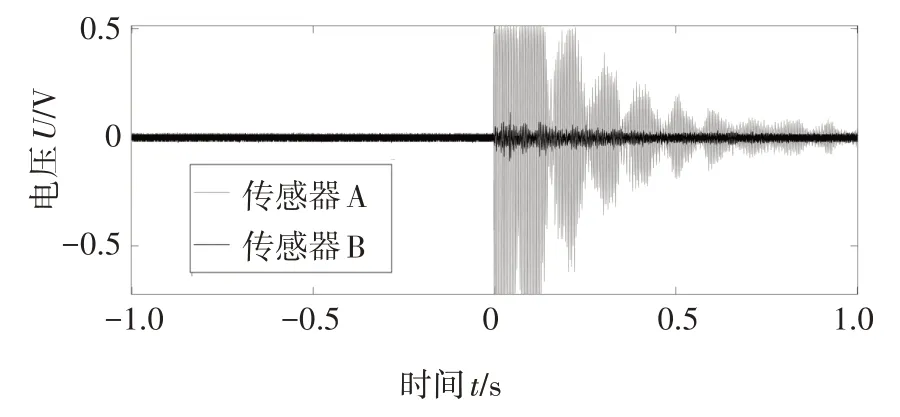
圖12 振動信號經(jīng)過GIL雙伸縮節(jié)前后的加速度波形Fig.12 Acceleration waveform of vibration signal before and after GIL double expansion joint
如圖9 所示,在試驗布置時,傳感器固定點與復(fù)雜殼體結(jié)構(gòu)間存在一段直管,因此振動信號在兩傳感器間傳播的總時間是振動信號經(jīng)過復(fù)雜殼體結(jié)構(gòu)以及復(fù)雜殼體結(jié)構(gòu)兩側(cè)直管段的時間之和.為了得到振動信號經(jīng)過復(fù)雜殼體結(jié)構(gòu)的等效波速,需要在總時間中減去振動信號在直管上的傳播時間.根據(jù)先前仿真與試驗結(jié)果,當(dāng)對GIL 外殼施加徑向激勵時,安裝在GIL 外殼頂部的單軸振動加速度傳感器只能測得幅值較大的橫波信號,幅值很小的縱波信號埋沒在噪聲中無法區(qū)分,因此取橫波在鋁合金桿中的傳播速度3 159.7 m/s作為直管段的波速.
在GIL 的B 相和C 相分別開展試驗,計算得到的振動信號經(jīng)過GIL 復(fù)雜殼體結(jié)構(gòu)的等效波速如表2所示,每一組試驗工況下的典型波速均為三組重復(fù)試驗計算所得結(jié)果的平均值.
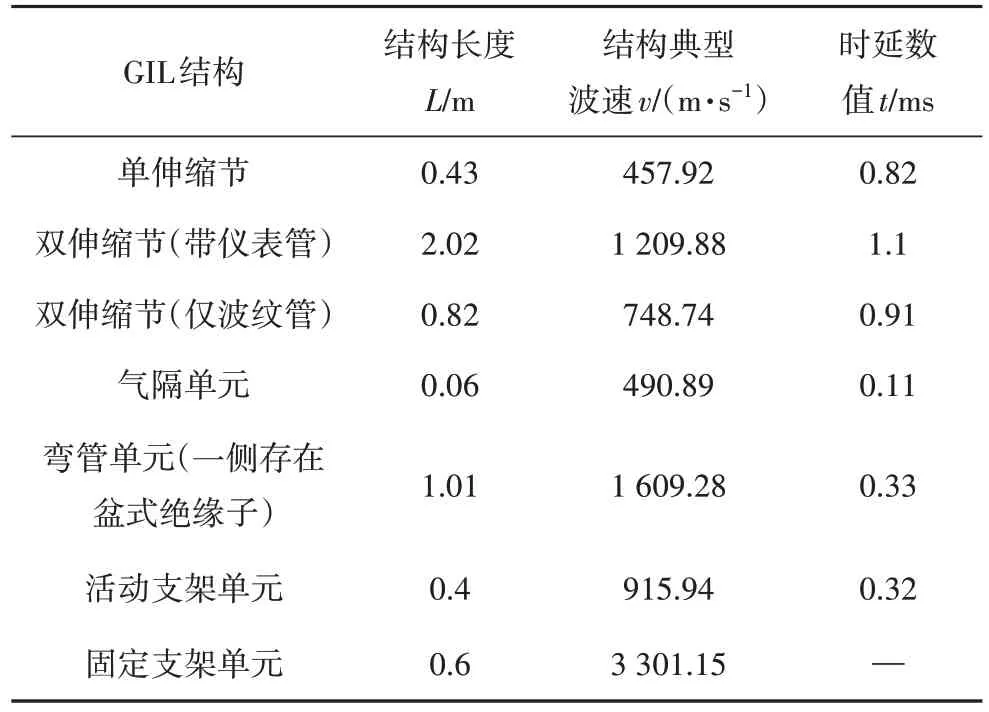
表2 220kV GIL復(fù)雜殼體結(jié)構(gòu)實測典型波速Tab.2 Typical wave velocity measured by 220kV GIL complicated shell structure
試驗結(jié)果表明,220 kV GIL 各復(fù)雜殼體結(jié)構(gòu)會使當(dāng)前振動故障定位在線監(jiān)測系統(tǒng)所監(jiān)測的橫波振動信號產(chǎn)生0.1~1.1 ms 不等的時延.因此,可根據(jù)實際振動故障定位在線監(jiān)測系統(tǒng)傳感器的布置方式,在算法中綜合考慮傳感器間復(fù)雜殼體結(jié)構(gòu)造成的振動信號時延量,以實現(xiàn)對故障點的進(jìn)一步精確定位.
3.3 仿真與試驗結(jié)果比較
為驗證本文所提出的振動信號在GIL 內(nèi)傳播過程數(shù)值模擬方法的正確性,按照上述各試驗工況建立與之對應(yīng)的仿真模型,如圖13所示.
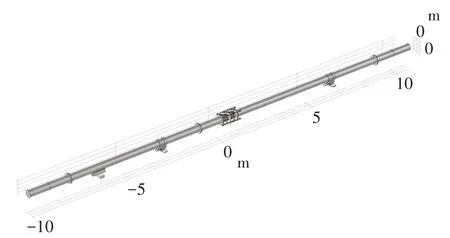
圖13 與試驗工況對應(yīng)的仿真模型Fig.13 Simulation model corresponding to test condition
在GIL 仿真模型外殼上與試驗工況中力錘敲擊位置相對應(yīng)處添加激勵力,所添加的激勵力波形由各試驗工況中壓電式?jīng)_擊力錘輸出的激勵力波形擬合得到.試驗中壓電式?jīng)_擊力錘輸出波形以及仿真模型中添加的激勵力擬合波形如圖14 所示.相比于直接采用力錘的輸出波形,使用擬合函數(shù)作為激勵力可以有效減少仿真結(jié)果波形抖動的情況.
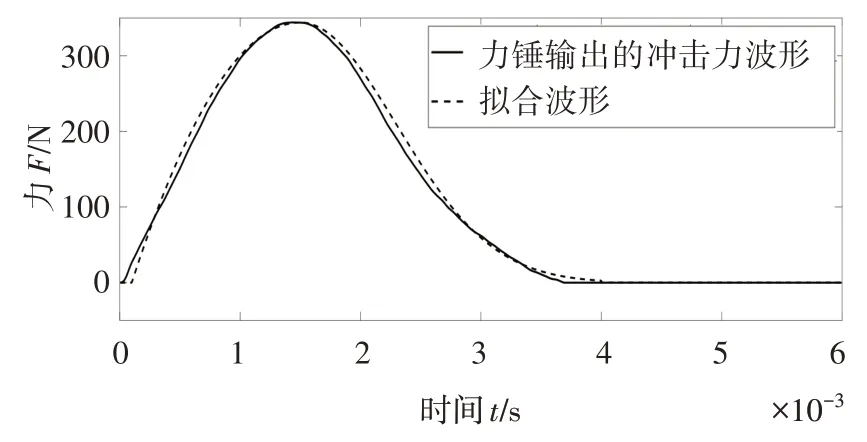
圖14 沖擊力錘輸出的激勵力信號及其擬合波形Fig.14 Exciting force signal output by impact hammer and its fitting waveform
仿真得到的含復(fù)雜殼體結(jié)構(gòu)的GIL 模型徑向加速度分布場如圖15 所示.在各仿真模型的復(fù)雜殼體結(jié)構(gòu)兩側(cè)添加探針,記錄探針處的徑向加速度時域波形,如圖16 所示.試驗中測量得到的噪聲信號的平均幅值為0.3 m/s2.為考慮噪聲干擾帶來的影響,將仿真波形中第一個峰值大于0.3 m/s2的波頭作為首波,認(rèn)為其之前的波頭在實際測量時均淹沒在噪聲信號中,無法測得.

圖15 含單伸縮節(jié)的GIL仿真模型徑向加速度分布場圖Fig.15 Radial acceleration distribution diagram of GIL simulation modal with single expansion joint
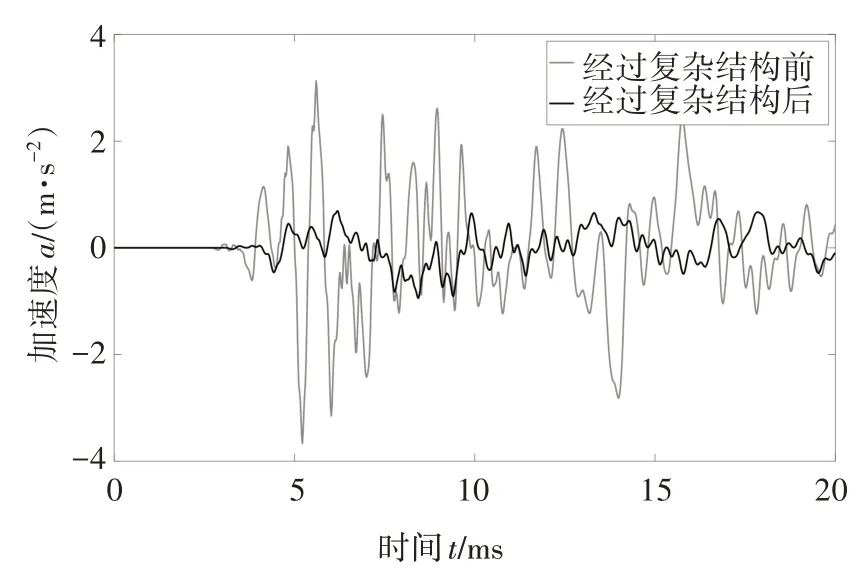
圖16 振動信號經(jīng)過GIL單伸縮節(jié)前后的加速度仿真波形Fig.16 Acceleration simulation waveform of vibration signal before and after GIL single expansion joint
以仿真得到的復(fù)雜殼體結(jié)構(gòu)兩側(cè)探針處加速度波形的首波峰值點作為計算基準(zhǔn)點,分別計算振動信號經(jīng)過各種復(fù)雜殼體結(jié)構(gòu)的典型波速,結(jié)果如表3所示.

表3 220kV GIL復(fù)雜殼體結(jié)構(gòu)仿真典型波速Tab.3 Typical wave velocity simulated by 220kV GIL complicated shell structure
對比表2 和表3 可以看出,振動信號經(jīng)過GIL 各復(fù)雜殼體結(jié)構(gòu)的傳播速度仿真值與試驗值較為接近,證明了振動信號在復(fù)雜殼體結(jié)構(gòu)GIL 內(nèi)傳播過程的聲-結(jié)構(gòu)耦合有限元數(shù)值模擬方法的正確性與有效性.
4 結(jié)論
本文基于多物理場耦合技術(shù),提出了一種振動信號在GIL 內(nèi)傳播過程的聲-結(jié)構(gòu)耦合有限元仿真方法,并對220kV 真型GIL 開展試驗與仿真研究,得到了如下結(jié)論:
(1)GIL 殼體受到徑向激勵時,沿殼體傳播的振動信號中橫波振幅遠(yuǎn)大于縱波,幅值很小的縱波信號容易埋沒在現(xiàn)場噪聲之中不易于區(qū)分.
(2)通過現(xiàn)場試驗獲得了徑向激勵下橫波振動信號經(jīng)過GIL 各復(fù)雜殼體結(jié)構(gòu)的典型波速與時延數(shù)值,所得結(jié)果可以直接用于改進(jìn)基于時差法的振動故障定位算法,即從總時差中減去復(fù)雜殼體結(jié)構(gòu)所造成的時延量,進(jìn)而忽略復(fù)雜殼體結(jié)構(gòu)的影響,將實際GIL 等效為純直管段,按振動在直管段的傳播速度計算故障點所在位置.
(3)按照試驗工況建立1∶1 仿真模型,對比仿真與試驗結(jié)果證實了本文數(shù)值模擬方法的正確性與有效性.本文提出的分析方法可以推廣到各種電壓等級GIL 設(shè)備振動信號傳播規(guī)律的研究中,為當(dāng)前故障定位在線檢測系統(tǒng)的性能提升提供依據(jù).
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25