互聯互通框架下的地鐵信號集中監測系統設計
2022-02-27 03:27:20賀昌壽
電子設計工程 2022年4期
王 磊,賀昌壽,尤 剛
(1.成都地鐵運營有限公司,四川成都 610000;2.中國鐵路成都局集團有限公司,四川成都 610000;3.四川網達科技有限公司,四川 成都 610000)
地鐵是城市交通的主要運力,其安全性也越來越得到重視。軌道信號是能反映地鐵運行狀態的最重要信息,軌道交通信號集中監測系統作為交通網絡的中樞神經,是提高運輸效率的首要一環,對此,文獻[1]分析了延伸線路采用統一信號系統,采用互聯互通信號系統接入既有技術方案,得出當前互聯互通信號系統在既有線延伸段工程中的適用性的結論。文獻[2]以典型的互聯互通CBTC 軌道交通信號系統為研究對象,提出了采用車載兼容、信號顯示趨同化的近期互通方案,為市郊鐵路信號系統互通性設計提供參考。
但是以往研究的地鐵信號互聯互通系統還存在著很大不足,如響應時間慢、實時性低、監測距離不達標等。同時,基于互聯互通的CAN 總線監測方法因結構簡單,性價比高,被認為是最有前景的信號監測方法,廣泛應用于各控制系統中的信號監測和通信。所以,文中在互聯互通框架下,設計了地鐵信號集中監測系統,旨在提高信號監測的實時性與監測性能。
1 系統架構設計
圖1 為地鐵實現互聯互通的整體架構。
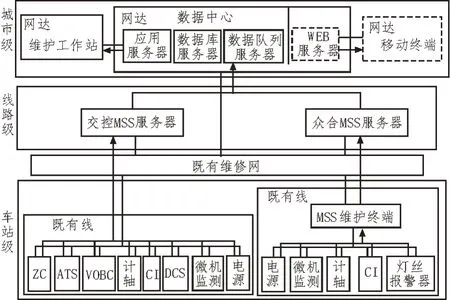
圖1 地鐵實現互聯互通的整體架構
在圖1 中,將架構分為三級:車站級、線路級、城市級。
車站級:包括ZC、ATS(ATP/ATO)、VOBC、CI、視頻缺口、計軸、微機監測、電源屏等子系統以及站上MSS 維護終端和微機監測維修機。
線路級:包括各線路集中數據中心和維護支持子系統。
城市級:包括互聯互通數據中心、維護工作站、移動終端等[3-6]。
在圖1 的支持下,地鐵信號集中監測系統需要具備數據采集、通信和串口通信等功能,所以文中優化設計了數據采集和數據傳輸兩部分,系統結構如圖2 所示。

圖2 互聯互通框架下的地鐵信號集中監測系統硬件結構
由圖2 可知,在構建基于互聯互通的信號監測系統時,需要考慮到系統本身的實時性、可靠性,因此,通過物理介質冗余設計來提高系統穩定性,逐一優化地鐵信號集中監測系統硬件結構。
1.1 CPU設計
CPU 搭載16/32 位ARM7TD 芯片系統,具有較高的計算性能。CPU 結構由定時器維護,通過緩沖寄存器和數據總線對數據進行判斷。程序計數器PC端保持實時工作界面,以確保命令控制的實時性,通過命令循環保證監控數據的有效性。為確保最大時鐘速度下的32 位代碼能夠正常工作,采用獨特的加速模塊,設接口位寬為128 位[7-9]。
1.2 微處理器設計
ARM7TDMI-S 為通用的32 位微處理器,常見的復雜指令集譯碼計算較為復雜,所以,ARM 結構基于精簡指令集原理設計而成,減少了系統工作量,發揮了ARM7TDMI-S 高性能的優點,提高了處理器實現高吞吐量,為實現實時中斷反應提供支持。處理器有兩個指令集,分別為標準32 位ARM 指令集和16 位THUMB 指令集,使用THUMB 的特殊結構,使系統具備流水線性工作功能,可以連續不間斷地工作,實時處理多條指令。
1.3 存儲器設計
存儲器內部芯片為LPC292 芯片,LPC292 芯片可用作代碼和數據的儲存單元,因其搭載256k 的FLASH 高速存儲器,適用于臨時數據的高速寫入,支持8/32 位訪問,具有64k 字節靜態儲存,包含回寫緩沖模塊,可以作為臨時代碼和數據的儲存器。緩沖模塊會保存最后一次接收到的字節數據,并在軟件下一次請求時,將該數據寫入SRAM,該回寫緩沖模塊能夠防止大量的數據寫入造成CPU 停止響應,但是在芯片復位情況下,SRAM 內數據將會初始化,不再保存最后一次接收到的字節數據,也不會反映出來。通過內置串行接口可實現高速儲存器內程序的編程和擦除,方便數據儲存和固件升級[10-12]。
1.4 收發器設計
選用TJA1050 高速收發器,該收發器作為協議控制和數據總線的接口,工作波特率為60~1 000 kbps,主要功能為數據總線提供收發功能。TJA1050 收發器電磁輻射低,且具抗電磁干擾的差動接收器,實現引腳保護[13-14]。該文設計的連接結構共有5 個連接點,將控制器和收發器相結合,在處理數據時,CAN總線發出聲波,更好地獲取監控信號。
1.5 通信接口設計
利用CAN 接口實現RS-232 總線設計與優化。文中設計的通信接口系統外部時鐘和復位電路相互配合,嵌入式微控制器與CAN 總線控制器相互配合,CAN 總線收發器與RS-232 電平轉換位于兩端,配合RS-232 工作。
RS-232 是計算機與終端或外部設備之間的連接,符合串行物理接口標準。為保證其正常工作,電平應控制在±(5~15)V 之間,所以在連接計算機和控制器時,必須考慮RS-232 與電路連接時,由于串口不同造成的電平差異,同時也要考慮邏輯轉換。該文采用內部嵌入電壓倍增電路的轉換芯片MAX232實現電平轉換。
1.6 CAN控制器總線電路設計
控制器處于總線式串行通信網絡的局域網,該網絡通信系統能夠確保信息的無差錯傳輸,并能夠對通信數據壓縮成幀,以便于信息的可靠靈活傳輸[15-16]。
數據以幀的格式傳輸,依據格式差異,分為標準幀和擴展幀,標準幀只有11 位標識符,擴展幀有2 位標識符。CAN 總線空閑時,每個節點都可以收發數據信息。共有8個電阻,控制器總線電路中,LPF負責維護整個電路的運行,防止出現短路現象,使得城市級信號系統健康中心與線路級MSS 服務器使用統一的接口方式和通信協議,使新的MSS 服務器接入更規范。
2 系統功能設計
各線MSS服務器接入健康平臺有以下兩種方案,分別如圖3 和圖4 所示。
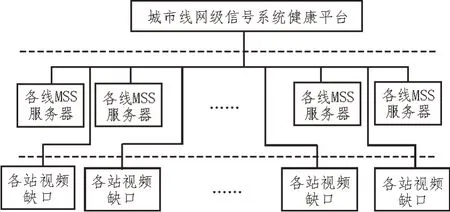
圖3 接入方案1

圖4 接入方案2
方案1:此種方案中的各線MSS 服務器直接接入健康平臺。
方案2:此種方案中,總承方搭建一個MSS 集中服務器,各線MSS 服務器把數據集中傳輸到此集中服務器,然后各總承方集中服務器再接入健康平臺。理論上,健康平臺支持以上兩種接入方案,在各總承方還沒有建立自己的集中服務器之前,可以用方案1 的接入方式接入健康平臺。等各總承方建立了各自的MSS 集中服務器后也可以支持集中服務器接入健康平臺的方案。兩種接入方案實施的前提是必須遵循標準的數據通信協議。因此,需要規范地鐵信號集中監測系統功能。
數據包統一以幀為單位,但是每一幀的格式和長度有所不同,所以,在重要節點設置冗余配置以減小數據包大小,提高系統實時性和可靠性。采集設備種類繁多,所以采集方式也各有不同,采集的數據有差異性,且數據包的傳輸格式也不盡相同。但是,由于數據包較小,相同的硬件和底層軟件足以完成系統功能要求。
第一步:通信設置。LPC2292包含2個CAN 控制器,利用RAM 實現通信設置,為集中監測打下基礎。
第二步:CAN 接收函數判斷。由于數據接收具有不定時性,無法判斷發送節點發送數據的時間。在對數據查詢時存在不確定性,循環查詢會浪費時間,加大處理器工作量,作為實時變化因素在運行期間完成數據的實時接收與緩沖,避免重復建立多個緩沖區,改善了造成內存不足的問題,實現了數據的實時接收,提高系統實時性。
第三步:通過CAN 接收函數分析,利用發送程序確定接收程序,在發送的數據中提取有效數據,輸入到寄存器中,在采集機內部確定數據,通過協議得到規定格式的數據包,集中整合了各線路MSS 服務器數據,實現了數據的集中存儲,為大數據的分析統計奠定了基礎。
第四步:通過分包發送實現數據傳輸,數據幀包括幀頭(通常用SOH 表示)、數據大小、數據字節和校驗碼。通常幀頭信息會包含標識、信息源地址和目的站地址,所傳輸的數據長度是發送的該數據包中數據的字節數,確定校驗碼,通過冗余計算獲得數據。
第五步:在完成冗余設計后,得到共用體,數據量共有16位,設置第一位為最低位,最后一位為最高位。
2.1 圖形化顯示功能設計
利用AutoCAD 圖元實體擴展數據,使用CadTool 軟件對CAD 圖紙內的圖元添加擴展數據,系統調用CAD 原理圖時,通過ActiveX 控件讀取CAD 每一個圖元擴展數據,形成數據集,接口程序從中心服務器提取相關數據,并按時間序生成新的數據集,當用戶播放CAD 圖畫時,ActiveX 控件將新數據集內容按時間序寫入相應的圖元,實現CAD 圖元與外部數據的交互動作。
2.2 報警管理功能設計
實時報警以彈窗的方式給出提示,同時可以選擇開啟/關閉語音報警,城市級信號系統健康中心使用圖形化顯示方式,能夠直觀地反映現場設備運行狀態,并且圖形化的設備狀態與報警相結合,使報警分析更方便。
3 案例驗證
以成都地鐵為例,交控MSS 服務器與信號系統健康中心網絡貫通后,進行現場測試。測試內容:交控MSS 服務器接入網達隊列服務器進行聯調。實驗步驟如圖5 所示。

圖5 地鐵信號集中監測流程
假設系統時鐘的技術頻率為f,系統響應時間為T,則Tcan=(a2-a1)/f,以此可以計算出系統的響應時間。依次記錄波特率從1 Mbps 降低至100 kbps 時定時器的時間讀數,并根據公式計算出相應的響應時間,調試實驗結果對比如表1 所示。
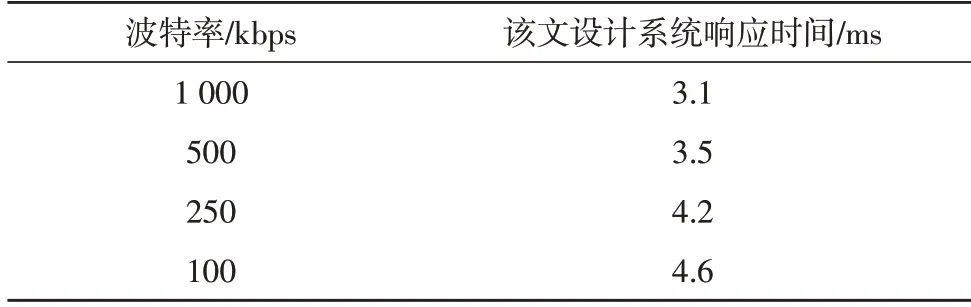
表1 調試時間實驗結果
CAN通信的實時性指的是發送節點寫入數據發送至緩存器與接收到數據之間的時間差,所以CAN 數據的響應時間越短,則表示系統的實時性越高。以上述實驗參數為基礎,對系統檢測性能進行實驗驗證。
在圖5 的基礎上,將波特率從1 Mbps 逐漸降低,依次測量兩個任意節點之間最長傳輸距離,實驗結果對比如表2 所示。
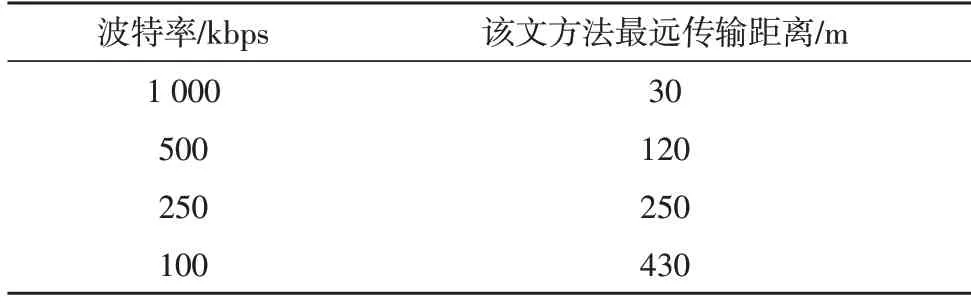
表2 最遠傳輸距離實驗結果
由表2 的實驗結果可以看出,在100 kbps 的限制下,該文方法最遠傳輸距離可達430 m。
4 結束語
該文針對現有地鐵信號集中監測方法存在的響應時間慢、實時性差和檢測性能的問題,設計了基于互聯互通的地鐵信號集中監測系統,在互聯互通環境下,引入了CAN 控制系統,對CAN 通信設置初始化,獲取CAN 接收函數和發送函數,通信協議編程,完成地鐵信號集中監測,使其在響應時間、實時性和監測性能方面具有優越性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
