高炮對空中虛擬靜態目標射擊精度試驗方法
2022-02-28 12:54:32史海龍王晶晶馬金龍任成才姜兆義
火炮發射與控制學報 2022年1期
史海龍,王晶晶,馬金龍,任成才,姜兆義
(1.中國人民解放軍63850部隊,吉林 白城 137001;2.中國人民解放軍32200部隊,遼寧 錦州 121000)
在考核高炮武器系統毀殲概率時,一種常用的方法是通過合成武器系統的射擊諸元解算精度和對固定點目標的射擊精度,形成對動態目標的射擊精度,進而計算毀殲概率。對速射高炮,彈丸射擊誤差之間的時間相關性越來越重要,試驗不僅要測得彈丸射擊誤差的空間特性,也要測得時間特性。在測試武器對固定點目標的射擊精度時,不僅要測試射擊誤差,還要考核射擊誤差的時間特性,即連發射擊時各發彈丸射擊誤差的相關性。如何測試各發彈丸的射擊誤差相關性是一個需要解決的問題[1]。
目前設計定型試驗中對固定點目標射擊精度的試驗方法是立靶法,在地面上豎立一個足夠大(8倍中間誤差以上)的木板靶[2],射擊完成后,測量靶上的彈著點坐標,最后計算出射擊誤差。試驗中采用摘火引信實彈,是為了避免彈丸命中木板靶時爆炸,對靶板造成較大損傷,無法精確測得命中點坐標[3]。此種方法存在一定的缺陷:
1)不能滿足試驗需求。立靶法可以滿足200 m密集度試驗需求,但是不能滿足毀殲概率試驗需求。毀殲概率試驗不僅要測得射擊誤差的空間關系,同時也要測得時間特性,在試驗中要得到彈序關系,而目前的木板靶法是在射擊結束后測量靶板上的彈丸坐標,此種方法不能確定靶板上的坐標對應哪一發彈,也無法確定射擊彈序。另外,對于防空高炮,實戰情況下是采用實彈對空中目標進行射擊,采用摘火引信彈或砂彈都是一種近似。200 m地面目標也不是高炮的主要作戰方式,小口徑高炮一般射擊空中5 000 m以內的目標[4]。
2)彈丸協調困難,試驗周期長。傳統立靶密集度試驗用裝有摘火引信的實彈射擊木板靶,此種彈藥屬于特種彈藥,無法直接通過調撥現有彈藥得到。對引信進行摘火是一項危險性較高的行為,隨著彈丸越來越精密,一般只有彈丸生產廠家具備此項技術能力。而試驗用彈量一般較少,彈丸廠家不會預先生產此種彈藥,需要專門進行定制,周期長,協調困難。
3)存在安全隱患。摘火引信實彈具有戰斗部,由于沒有引信,擊中靶板后,不會爆炸,也不會像實際的戰斗用彈一樣,在未命中目標的情況下,會在一定時間內自炸,而是落于靶場內,射擊后的彈丸極難全部回收,存在安全隱患。
為解決上述問題,筆者建立了一種采用真引信實彈對空中虛擬點進行射擊的試驗方法,通過火炮連發射擊空中預定的虛擬點坐標,射擊同時測量光電經緯儀測得彈道坐標,過虛擬點垂直炮目連線建立虛擬靶,計算彈丸與虛擬靶面的交點,統計出射擊誤差和相關系數。
1 試驗方法
1.1 布站
布站的目的是使火炮和目標的相對位置符合試驗需求,確保光電經緯儀與目標通視并滿足測試精度。布站時采用與對空射擊類似的方法,但不射擊動態目標,射擊空中固定虛擬點目標[5]。
布站前,要確定火炮、目標和光電經緯儀共同采用的大地坐標系。由于本文的彈丸射擊目標、光電經緯儀光軸指向是一個虛擬點,不能通過瞄準實物目標的方式進行,而是通過坐標裝定的方式實現,因此必須統一坐標系,避免光軸指向點和射擊點出現偏差。可以采用54坐標系、84坐標系或者靶場內部確定的坐標。這幾種坐標系北向并不相同,在使用時,任選一種。
首先確定炮位G,然后根據試驗需求設置,設定空中不動點T,點T坐標為[xt,yt,zt]。最后,光電經緯儀根據精度和測量范圍進行適當布站,可以采用兩臺光電經緯儀測量一個固定點附近的彈丸坐標,也可以多臺光電經緯儀接力測量整個彈道的坐標[5]。采用兩臺光電經緯儀布站如圖1所示,設兩臺光電經緯儀位于C1和C2點,則兩臺光電經緯儀光軸過T點,經緯儀與T點保持通視。在設置C1和C2點時,要根據彈丸坐標測試精度和光電經緯儀本身性能參數合理設置,使彈丸坐標測量精度滿足指標要求[6]。同時,要使光電經緯儀的覆蓋范圍足夠大,滿足8倍中間誤差要求。

1.2 瞄準(裝定諸元)
布站后,要在火炮上進行射擊目標裝定,用于解算射擊諸元。裝定時,要將大地坐標系下的T點坐標轉換為火炮坐標系下的坐標GT[7]。
目前國內高炮常見的坐標系有兩種,一種多用于牽引高炮使用,此種坐標系以南為方位0向,逆時針旋轉為正,高低角向上旋轉為正。一種自行高炮,方位向以車體縱軸為0,順時針旋轉為正,高低角向上旋轉為正[8]。
首先要通過預設的方位標桿P,根據炮位坐標G和標桿坐標P,可以計算出標桿在大地坐標系中的方位角aP,此種計算方法以北為0,順時針旋轉為正[9]:
(1)
式中:xP-G為大地坐標系中標桿到炮位的x軸距離;yP-G為大地坐標系中標桿到炮位的y軸距離。
對于牽引高炮,即以北為0的高炮,使火炮瞄準標桿,查看火炮的輸出方位角αG,通過對火炮參數進行設置來改變火炮的方位角初始0位,使火炮坐標系下標桿P的方位角GαP變為
GαP=6 000-ap.
(2)
確定坐標系后,根據T在大地坐標系中的坐標,轉化為火炮坐標系中的坐標:
GT=T-G.
(3)
對于自行高炮,確定車體縱軸與北向的夾角,即火炮航向角。使火炮瞄準標桿,查看火炮的輸出方位角GαP,與aP比較,可確定火炮航向角h[10]:
h=aP-(6 000-GαP).
(4)
結合車體縱搖角p和橫滾角r,將T轉換為火炮坐標系下坐標:
(5)
將T點在火炮坐標系下的坐標GT裝定進火控計算機,同時裝定彈丸初速、氣象條件等參數,解算射擊諸元,準備射擊。在靶場中,常用的點位和方位標已經預先建好,如圖2~4所示。

1.3 射擊及測試
準備結束后,先進行清場,確保彈道下及彈著點附近無人。根據火控計算機解算的射擊諸元,控制火炮身管按諸元指向,然后控制武器系統對T點進行射擊。
首先進行單發射擊,進行穩炮并對試驗方案進行驗證。在穩炮射擊過程中,光電經緯儀測試彈丸坐標,若光電經緯儀可測得彈丸圖像,說明布站、裝定正常,可以繼續進行連發射擊試驗。
連發射擊試驗過程中,光電經緯儀進行拍攝。試驗結束后,經過對光電經緯儀測得圖像進行處理,得到每發彈帶時間標記的彈道坐標:
每一行表示一發彈的坐標,每個坐標由時間和空間中三維坐標表示。
2 數據處理方法
2.1 彈著點坐標
經過試驗得到數據后,對數據進行處理[11]。將過點T,垂直于炮目連線的平面設為虛擬靶平面X,可表示為
T·(X-T)=0.
(6)
由于光電經緯儀采樣時間間隔較短,可以將彈道簡化為一段段的線段。設第i發彈,測得的第j個位置為Pij,則j和j+1之間線段可表示為
Sij(t)=Pij+k(Pi(j+1)-Pij).
(7)
將式(7)帶入式(6)得
T·[Pij+k(Pi(j+1)-Pij)-T]=0,
(8)
解得參數 :
(9)
若0≤k≤1,則認為線段與靶面相交,否則,認為線段與靶面不相交,繼續計算其他線段。根據試驗方案設定,每發彈必然存在位于虛擬靶面前后的兩個點,必然可以找到0≤k≤1的點[12]。則相交點坐標:
(10)
中靶時刻:
(11)
對每一發彈重復上述計算,得{(t1,Q1),(t2,Q2),…,(tm,Qm)}。
2.2 角度誤差
設點P坐標為(xp,yp,zp),則可以根據式(1)計算方位角。方位角以北為0,逆時針旋轉為正,如果武器系統順時針旋轉為正,方位角結果要加負號。
高低角為
(12)
將彈丸命中點坐標和點T在站心坐標系的坐標代入式(12)并相減,可以得到彈丸命中點Qi的方位角aQi、高低角eQi,T點的方位角aT、高低角eT,相減得第i發彈的方位角誤差Δai和高低角度誤差Δei:
Δai=aQi-aT,
(13)
Δei=eQi-eT,
(14)
對每一發彈計算,得
{(t1,Δa1,Δe1),(t2,Δa2,Δe2),…,(tm,Δam,Δem)}。
2.3 相關系數
將{(t1,Δa1,Δe1),(t2,Δa2,Δe2),…,(tm,Δam,Δem)}按ti大小進行排序,可以得到近似的按射擊順序排列的誤差:
{(t1,Δa1,Δe1),(t2,Δa2,Δe2),…,(tm,Δam,Δem)},設X1=[Δa1,Δa2,…,Δam-1],X2=[Δa2,Δa3,…,Δam],根據相關系數定義,可求得方位角相關系數設ra:
(15)
同理,設Y1=[Δe1,Δe2,…,Δem-1],Y2=[Δe2,Δe3,…,Δem],可得高低角相關系數re:
(16)
每次點射計算一次相關系數,多次點射后,取平均值,即可得最終相關系數。
3 與其他試驗科目的關系
在高炮試驗中,對空射擊精度是一個重要指標,在試驗過程中,通過射擊動態目標,光電經緯儀測得目標坐標和彈丸坐標,經過計算得到脫靶量。本文中的方法是對靜態目標進行射擊,在實施過程中,可以采用和動態目標同樣的布站方式和測試方案,減少重復布站消耗,加快試驗進度。
對于連發射擊前的單發射擊試驗,可以同測量彈丸初速試驗結合,在向T點射擊過程中,用測速雷達測得彈丸初速,用光電經緯儀采集彈丸圖像,驗證測試方案是否正確。
也可以用本文方法代替立靶法測試立靶密集度。相比于傳統的立靶試驗方法,本文方法統一了立靶試驗和對空射擊的試驗方法,在試驗中具有對空射擊科目時,在進行對空射擊試驗準備的同時,也完成了本文方法的試驗準備,試驗整體復雜度下降;只有立靶科目而無對空射擊和毀殲概率科目時,要對經緯儀進行布站,并要將經緯儀坐標系與武器系統坐標系進行統一,實際操作復雜度上升,對試驗人員提出了更高的要求。用此方法代替立靶法時,要根據實際情況權衡是否使用本文方法。
4 應用
在高炮水平射擊200 m處虛擬點時,本文方法可以用來代替立靶密集度試驗。
在某型武器系統設計定型試驗中,在對空射擊前,進行了立靶密集度試驗,以驗證火炮狀態正常。在某試驗中,測試設備為某型光電經緯儀。試驗測試數據如圖5所示。坐標為以G為原點的坐標系,以大地坐標系的北向為X軸,向上為Y,東向為Z。
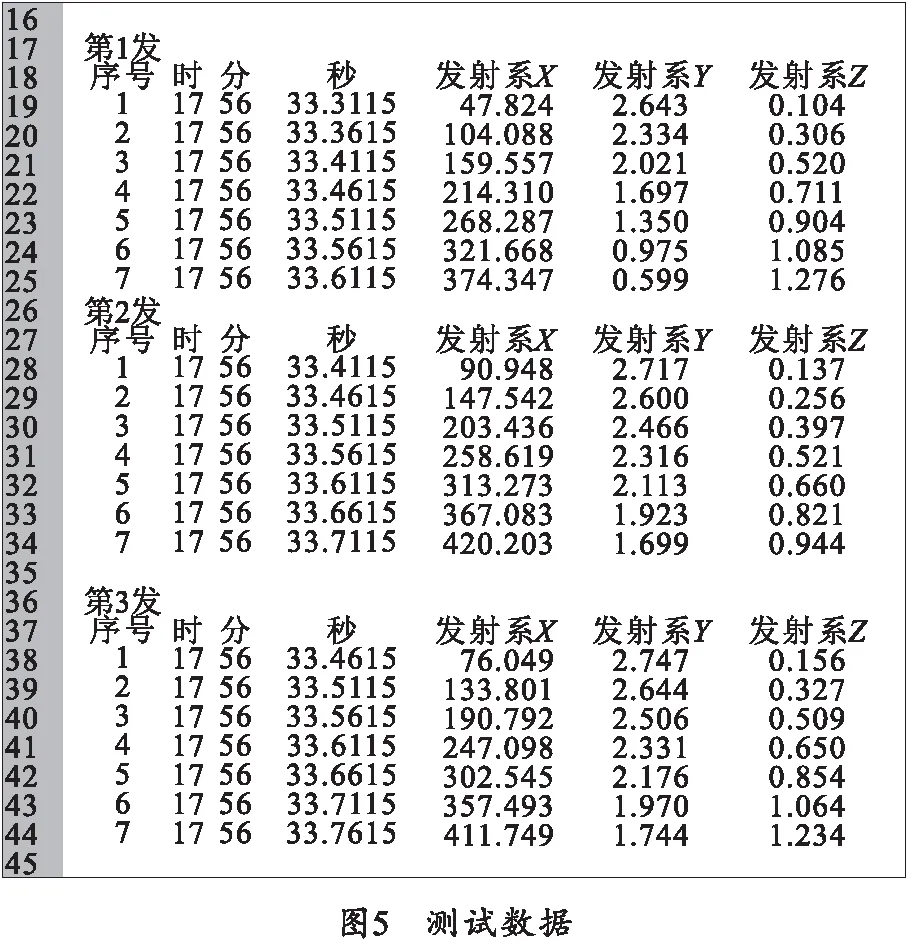
根據筆者提出的數據處理方法,按式(6)設置虛擬靶平面,其中虛擬靶平面距離為200 m,高低角為0°,方位角可根據實際情況設置具體值;然后將試驗數據代入式(10)可得到相交點坐標,重復計算得到相應的序列{(t1,Q1),(t2,Q2),…,(tm,Qm)};根據相應的火炮外彈道處理方法[2]計算立靶密集度,最終結果表明立靶射擊精度正常,順利進行后續的對空射擊試驗。
5 結論
筆者針對傳統方法無法測得高炮對固定點射
擊誤差時間特性的問題,通過射擊空中虛擬點,用光電經緯儀測試彈道坐標,計算射擊誤差相關系數的方法,建立了一種空中固定點射擊精度試驗方法。在實際試驗中應用表明,本文方法可以測得相關系數,滿足毀殲概率試驗的要求;同時采用實彈真引信,比摘火引信彈更容易協調,試驗進度更快;對比摘火引信彈,真引信實彈可以大概率空炸,避免實彈戰斗部掉入試驗場難以回收的問題,提高了試驗安全性。