超長引水隧洞測量控制技術
2022-03-01 07:35:00梁武
水利科技與經濟 2022年2期
關鍵詞:測量
梁 武
(廣東水電二局股份有限公司,廣州 511340)
1 工程概況
本工程為榕江關埠引水工程,作為韓江榕江練江水系連通工程的子工程之一,其主要任務是在優先實施練江流域控源截污工程和保護好榕江水資源水環境安全的前提下,實現榕江-練江水系連通,改善練江流域水環境及水生態質量。本工程由取水口、引水隧道、加壓泵站、高位水池、輸水隧洞、出水池、輸水明渠和涵管、出口防洪閘等建筑物組成。工程輸水線路總長34.970 km,其中T3段TBM隧洞長度為9 346.500 m,采用直徑5 060 mm雙護盾TBM掘進機,流水坡度為i=0.008%,TBM始發掘進方向是SD26+810.000~SD17+463.500。
2 平面控制網主要技術要求
2.1 GPS網布設
根據測區已有的資料、測區地形、交通狀況、精度要求、接收機數量,并考慮作業效率,按照優先設計原則進行布網。對于網中GPS點需要采用常規測量方法加密控制網時,至少應保證該點有一個以上的通視方向。本工程GPS網布設為多邊形網,網中每個閉合環或復合線路中的邊數應符合表1的規定。
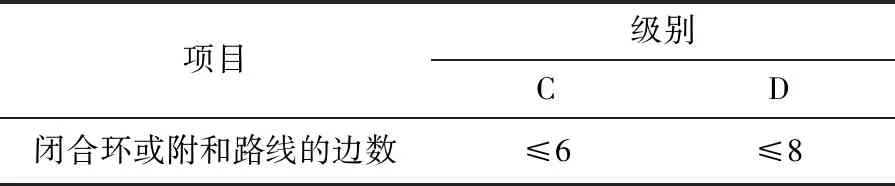
表1 閉合環或附和路線邊數的規定
2.2 選點與埋石
GPS點位的選擇基本與技術設計相符,依據規范并結合現場和工程需要進行優化,便于進行水準聯測、進行下一級控制,并有利于安全作業;點位便于安置接收設備和操作,視野開闊,接收機高度角大于等于15°;點位遠離大功率無線電發射源(如電視臺、微波站等),其距離不小于200 m,附近無強烈干擾接收衛星信號的物體。
標石埋設應選擇在地質堅硬穩固的地方,易于長期保存。埋設混凝土樁中間應設有標識,標識中心標志為帶十字絲的特制不銹鋼釘,用紅油漆或刻字標識樁位及點名,周圍設圍護欄保護。
2.3 GPS觀測
采用靜態定位測量的方法進行GPS網的外業觀測。接收機及天線型號正確準確無誤,主機及配件齊全,接收機及天線外觀良好,各部件及附件完好,緊固部件無松動和脫落,儀器經有關部門年檢鑒定,性能良好。外業觀測執行表2中的基本技術要求。

表2 GPS外業觀測的基本技術要求
設站時,天線嚴格整平,對中誤差小于3 mm;天線定向標志指向正北,定向誤差不超過±5°;觀測前按互為120°方向上量取天線高3次,其讀數差小于2 mm,并將中數輸入GPS接收機中。按要求及時填寫手簿的各項內容,觀測過程中不得更改各參數、再啟動、自測試、變動天線等,禁止在天線附近使用電臺、對講機等。
2.4 基線解算和檢核
基線解算和網平差均使用中海達HGO數據處理軟件進行處理,基線采用雙差固定解,根據軟件包說明按缺省參數進行解算[1]。
2.4.1 基線解算
基線解算全部求解出整周模糊度。所有基線的解算一般采用原始觀測數據,對于那些質量較差而影響基線解算質量的個別觀測時段的觀測數據,則根據各段時間的觀測數據的質量好壞進行時間上的取舍;對個別時段影響基線解算的殘差波動太大或失鎖周跳頻繁的個別衛星作剔除處理,同一時段觀測值的數據剔除率小于10%。經過處理,使得基線解算順利進行。
控制網的基線精度按下式計算:
式中:σ為基線長度中誤差,mm;A為固定誤差,mm;B為比例誤差系數,mm/km;D為平均邊長,km。
2.4.2 基線檢核
由基線處理結果計算的重復觀測基線較差、同步環閉合差、獨立環閉合差、附和路線閉合差應滿足表3的規定。
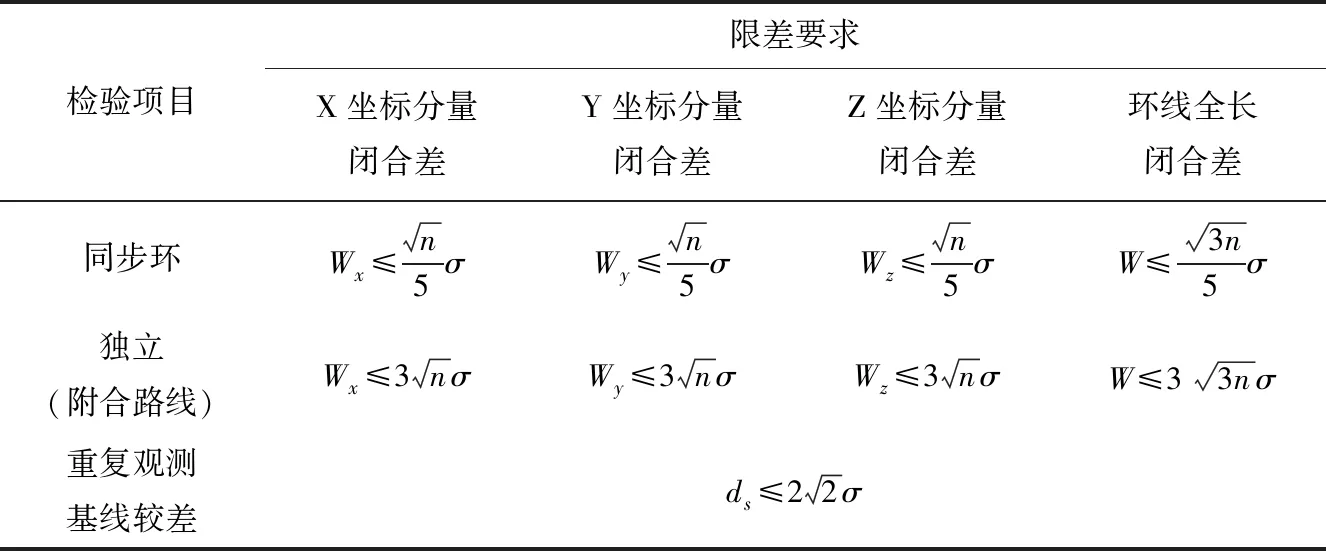
表3 基線質量檢驗限差
2.5 高程控制網主要技術要求
1)本次高程控制網為三等水準,其主要技術指標見表4-表6。

表4 精密水準測量的主要技術標準
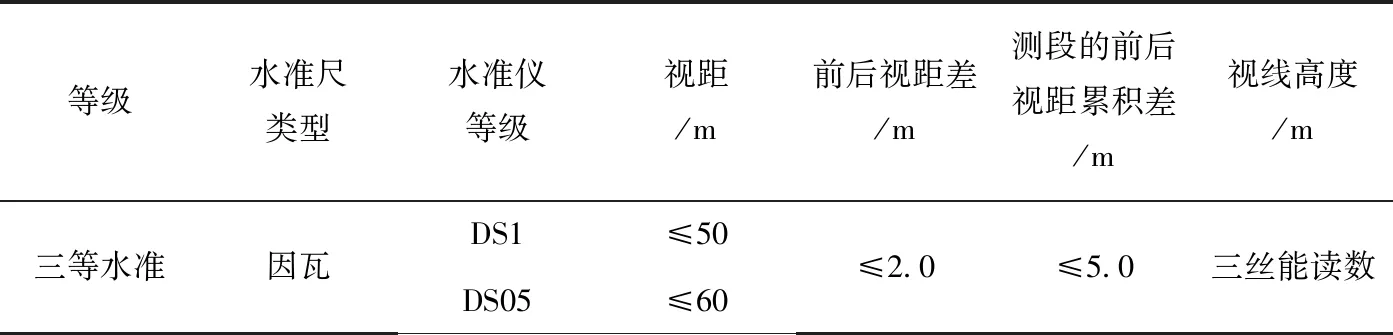
表5 精密水準觀測主要技術要求

表6 精密水準測量精度要求
2) 精密水準外業觀測。在水準復測前,首先進行現場勘查,檢查標石的完好性。經現場勘查,本段范圍內精密水準點沿線路走向布設,點間距500~1 000 m,點位布設均勻,樁點保存基本完好。
本次水準復測按國家精密水準測量的技術要求進行施測,并逐點復核相鄰水準點之間的高差。通過復測高差與設計高差進行比較,確認建設單位所交的高程控制點精度是否滿足精度要求,點位是否穩固可靠。
精密水準復測采用一臺徠卡NA2+GP3精密水準儀(儀器標稱精度均為每公里高差測量中誤差0.3 mm,可適用于精密水準測量)及配套的因瓦水準標尺,按照《國家三、四等水準測量規范》(GB/T 12898-2009)的水準測量要求作業[2]。
3 平面貫通誤差分析
3.1 平面貫通誤差的主要來源
1) 地面導線控制網誤差。
2) 隧道控制支導線誤差。
3) 測角、測邊、對中偏心等各綜合誤差。
3.2 貫通點的選擇
如果e1=e2=1.5 mm,s1=s2=150 m,SAB=300 m,則測量儀器的對中誤差:
目標的偏心差:
由誤差理論可知:當水平角為180°時,誤差對水平角的影響最大。
如果e1=1.5 mm時,m1為±2.06″;
e1=1.5 mm時,m2為±2.92″,則:
因此,為減少對中及目標偏心誤差對貫通橫向誤差的影響,考慮在嚴格校正棱鏡、覘牌對中的前提下,采用3次對中測角法,可將測角對中誤差降低為:
故在對中誤差<1.0 mm時,采用三次對中法測角對測角精度的影響可滿足小于規范的要求。觀測差:儀器標稱精度m儀=±0.5″,測角中誤差mβ=±2.5″。
為獲取“民用分類代碼”和“軍用分類代碼”中規定的基礎地理信息要素間的異同點,需要在軍民基礎地理信息要素映射關系表的基礎上,對映射關系進行統計分析,統計結果表明,有對應要素占39%,無對應要素占61%。
地下控制導線精度:
式中:fβ角度閉合差;n為測角個數。
附合導線閉合差的中誤差(對貫通誤差影響主要為橫向中誤差):
式中:mβ為測角中誤差;S為導線邊長;ρ為206 265。
隧道貫通前,地面GPS靜態聯測,隧洞連續測量4次,陀螺儀控制點方位角復合測量,不斷提高控制網導線點精度,有利于控制TBM掘進機按照設計軸線允許規范內貫通。
經地面控制導線網的復測,地面控制網中誤差為mi=±10 mm,投點誤差精度mt=±4.1 mm,則3#TBM始發井至2#TBM接收井平面貫通誤差為;
4 高程貫通誤差分析

5 優化測量技術方案
榕江關埠引水工程隧洞的測量技術優化方案主要從以下幾點入手:
1) 洞內控制點分別布置在管片左右兩側平行交叉延伸成對布設 ,點位距離300~600 m等距布置,減少測站次數,減少點位累計誤差。控制點選址在管片左右環高1 m牢固可靠的地方,做好點位測量標識,平面控制點均采用槽鋼型號8#、鋼板150*150*10、直徑16*25英制內六角螺絲鋼結構強制對中盤,安裝在線路的左右側,強制對中盤控制點可以減小全站儀對中點位誤差,也有利于高效測量。高程控制點采用不銹鋼十字半圓球混凝土澆筑,預埋在灌漿回填豆礫石孔內,洞內直伸式導線控制網改為導線控制網平行交叉式觀測 ,前后左右同側點測邊測角 ,前后左右側對點間加測邊長形成閉合角,導線控制網形成左右平行四邊形折回 ,這種左右平行交叉式導線控制網精度優于直伸式直導線控制網[4]。圖1為控制點平面位置圖。

圖1 控制點平面位置圖
2) 洞內精密導線控制網測量采用左右管片上平行延伸交叉式導線控制網。為避免旁折光、機車行走震動、皮帶機轉動振動,角度測量觀測誤差不設在同一側點 ,左右兩側點延伸等距測邊測角 ,導線終端一組控制點作為下次導線控制點延伸起算邊。
3) 陀螺儀觀測校核洞內控制網方位角。陀螺定向采用北京航天發射技術研究所自主研發生產的BTJ-5型陀螺全站儀[尋北精度≤5″(1σ)],上置Leica生產的TS-09plus 1″全站儀[4]。陀螺儀改進后可以安裝強制對中盤上,分別測出前后兩條邊方位角,陀螺儀校核TBM掘進機出洞前500 m最后二組控制點方位角,檢驗出洞前500 m處進行控制網邊方位角是否超限,陀螺儀測量計算出的坐標方位角與區間控制網測量的坐標方位角進行比較,較差控制在小于15″,控制在允許偏差內,符合《水利水電工程施工測量規范》(SL 52-2015)相向開挖長度小于10 km內貫通測量限差要求,確保貫通在允許偏差內。
6 結 語
針對榕江關埠引水工程超長9.3 km隧洞,洞內采用左右側強制對中盤控制網平行交叉式導線網加測同側邊長和近點邊長,能有效提高洞內方位角精度,減少點位對中累計誤差的影響,是提高控制網測量精度的有效方法。為了榕江關埠引水工程TBM隧洞施工測量精準貫通 ,陀螺儀復核安裝在對中盤測量平行交叉式控制網點邊長方位角的可行性,對指導超長隧洞貫通測量具有重要性意義。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
