基于梯度特征的弱小目標檢測
2022-03-01 06:30:56陳忠碧
激光與紅外 2022年1期
魯 梅,陳忠碧
(1.中國科學院光電技術研究所,四川 成都 610209;2.中國科學院大學,北京 100049)
1 引 言
光學成像檢測與跟蹤系統由于隱蔽性好、抗干擾能力強等優勢,在目標檢測與跟蹤任務中應用十分廣泛[1]。通常將尺寸在1×1到9×9個像素之間的遠距離目標稱為弱小目標,對這類目標的準確檢測可以大大增強系統性能。弱小目標檢測的主要難點在于:目標在成像中所占面積小,缺乏紋理和形狀特征;易受云層等復雜背景干擾;與周圍背景對比度低,易被噪聲淹沒等[2-3]。
目前根據檢測幀數可以將弱小目標檢測分為單幀檢測與多幀檢測兩大類。基于單幀檢測通常假設背景在空間上具有相關性,占據圖像低頻部分,目標與背景不相關,占據圖像高頻部分[4]。Top-hat濾波[5]、最大均值/最大中值濾波[6]和各向異性差分[7]等傳統的背景差分法結構簡單、實時性好,但對復雜背景和噪聲敏感;以局部對比度測度LCM[1](Local Contrast Measure)及其改進算法NLCM[8](Novel Local Contrast Measure)、ILCM[9](Improved Local Contrast Measure)等為代表的基于人類視覺系統的方法增強目標的同時可以抑制背景,但對低對比度場景檢測效果不佳;稀疏低秩矩陣恢復的方法[10]近年來備受關注,對背景與目標的低秩稀疏假設使這類算法魯棒性好,但易受高亮孤立噪聲影響。多幀檢測主要利用目標在時域的連續性,如粒子濾波算法[11]、基于高階累積量[12]和聯合時空域信息的方法[13]等,對低信噪比目標有比較好的效果,但是計算量大,依賴一定的先驗知識,在實際應用中受到一定限制。
本文在現有的研究基礎上,針對已有算法對低對比度、低信噪比場景檢測率低的不足,結合實際工程需要,提出一種基于梯度特征提取的弱小目標檢測方法。在紅外與強光背景可見光圖像序列上進行實驗,證明本文所提算法對復雜背景與低對比度圖像都有較好的檢測效果。
2 圖像結構分析
含弱小目標的圖像由背景、目標和噪聲三部分構成,即:
I(x,y)=IB(x,y)+IT(x,y)+IN(x,y)
(1)
其中,I(x,y)為原始圖像;IB(x,y)、IT(x,y),IN(x,y)分別表示背景、目標和噪聲成分。由于成像距離、大氣折射、光學離焦、鏡頭畸變等因素,目標大致為圓形斑點,可以用2D高斯對弱小目標建模,即:
(2)
目標區域均勻質密且各向同性,由峰值高度A,水平和垂直范圍參數σx和σy確定,(x0,y0)表示目標中心位置。根據紅外成像特點及對可見光圖像的實際工程需要,假設目標強度高于背景,如圖1所示。傳統空域檢測方法忽略背景本身的不連續性,易殘留背景邊緣等非目標成分,同時不能有效突出低對比度目標。

圖1 原始圖像
由于低信噪比、低對比度場景下目標與背景在灰度上非常接近,直接利用灰度信息難以區分目標與背景。圖像梯度直接反應像素間的相對強度及變化趨勢,可以很好表現目標與背景在形態上的差異,有利于低對比度和信噪比場景下的弱小目標檢測。
3 抑制梯度特征相似性檢測弱小目標
3.1 梯度特征提取
根據上一節對目標的2D高斯建模可以發現目標各個方向梯度具有相同的分布特點,即過目標中心在垂直梯度方向兩側呈一正一負分布。
Gx(i,j)=I(i,j+1)-I(i,j-1)
(3)
Gy(i,j)=I(i+1,j)-I(i-1,j)
綜上所述,公共性觀念的發展對西方美術館建筑空間形態的演變有重要影響,西方建筑師對美術館建筑空間形態的探索始終是站在時代背景和社會背景下,對人們的公共生活模式做出回應。筆者希望以上對西方美術館空間形態演變的研究能為我們深刻理解美術館各項活動的本質屬性提供參考,并為當下及未來美術館的發展方向提供歷史借鑒。
(4)
G45(i,j)=I(i-1,j+1)-I(i+1,j-1)
(5)
G-45(i,j)=I(i+1,j+1)-I(i-1,j-1)
(6)
圖2為圖1由式(3)~(6)得到的四個方向梯度。其中(i,j)為像素位置,Gx、Gx、G45和G-45分別對應水平方向x梯度、垂直方向y梯度、沿水平方向逆時針旋轉45°梯度與沿水平方向順時針旋轉的-45°梯度。圖2中平穩背景區域梯度響應值較小,邊緣區域僅在垂直邊緣的梯度方向上具有較大的響應,而目標在各個方向上都有明顯的正負分布。融合多個方向梯度特征可以使背景邊緣相互抑制,目標區域相互增強。但融合的方向越多所需計算量越大,并且可能導致對低對比度、低信噪比目標檢測范圍縮小,影響檢測效果。綜合考慮檢測效率與檢測效果,在實際應用中選擇x梯度與y梯度兩個方向梯度特征進行融合。
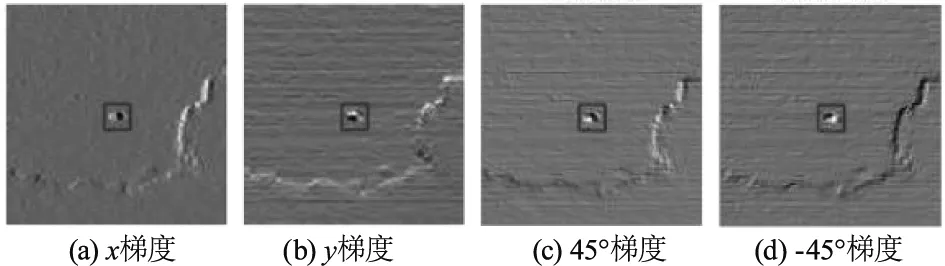
圖2 方向梯度
根據目標大小及在梯度空間的正負分布,設計如圖3(a)、(b)的5×5模板Mx、My提取x與y方向梯度特征。根據式(3)~(4)計算得到x與y梯度圖后,使對應模板按式(7)在梯度圖上滑動得到相應的梯度特征結果:
d={x,y}
(7)

圖3 梯度特征提取模板
GFd(Gradient Feature)為梯度特征提取結果,gd為梯度,Md為特征提取模板。因為在GFd中目標區域梯度特征值均為正,將特征圖中小于零的元素置為零,采用式(8)融合兩個方向梯度,使目標區域梯度特征相互增強,背景邊緣區域梯度特征相互抑制,得到如圖4(d)的梯度特征融合結果。
fused(i,j)=GFx(i,j)*GFy(i,j)
(8)
圖4(a1)、4(a2)為原始圖像。(a1)包含較強的邊緣背景,(a2)目標對比度較低;(b1)~(b2)與(c1)~(c2)分別為兩個場景x梯度特征與y梯度特征;(d1)~(d2)為融合結果。融合后的梯度特征不僅對強邊緣背景具有良好的抑制效果,而且能夠有效突出低對比度圖像中的目標區域。
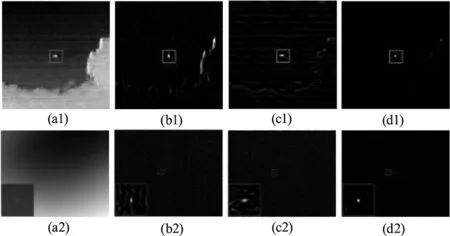
圖4 梯度特征圖
3.2 梯度特征相似性抑制
通過上述處理得到的融合結果中仍然存在殘余背景,在檢測中將導致較高的虛警,主要原因有以下兩點:
(1)與所取梯度方向均不垂直的邊緣在梯度特征中具有較大響應。遍歷所有方向尋找梯度特征響應最小的方向可以去除邊緣噪聲,但會帶來極大的計算量,且不利于低對比度目標的檢測。
(2)背景具有較大連續變化區域(如圖4(a2))使梯度連續負或連續正變化,可能導致較高的梯度特征響應。
為從背景中準確分離目標,需要對梯度特征進一步處理。弱小目標檢測的一個重要假設是背景連續而目標不連續,圖4(a1)~(c1)可以看出,這一假設在方向梯度特征中仍然存在,背景邊緣在沿邊緣分布方向上依然是連續的。因此對方向梯度特征進行相關性抑制一方面可以抑制連續分布的殘余邊緣,另一方面可以進一步突出目標。
LCM算法是抑制相關背景同時突出目標區域的方法。LCM算法通過滑窗的方式計算顯著性。首先將窗口區域分成3×3的小區域塊并標號。標號0表示中心區域,標號1~8為其8個鄰域區域。由式(9)計算中心區域與鄰域的對比度系數,ln為中心區域最大值,mi為對應標號鄰域均值,Ci為中心區域與鄰域的對比度系數,取ln與Ci乘積的最小值作為LCM算法最終結果,即式(10):
(9)
LCM=min(ln·Ci) (i=1,2,…,8)
(10)
直接使用LCM算法抑制梯度特征相關性后的融合結果如圖5(a)所示。首先傳統LCM算法存在明顯的塊效應,另外采用比值的方式計算對比度系數不適于存在大量0元素的梯度特征結果,例如當中心區域與領域相似,且中心區域均值不為零,鄰域均值為零時將產生較大的結果,與期望的結果不符。式(11)、(12)用中心區域均值代替最大值可以解決塊效應問題,用差值取對數的方式計算對比度系數更適應梯度特征結果。SS(Similarity Suppression)為相似性抑制結果,如圖5(b)所示。
Ci=log(|m0-mi|+1) (i=1,2,…,8)
(11)
SS=min(m0·Ci)
(12)
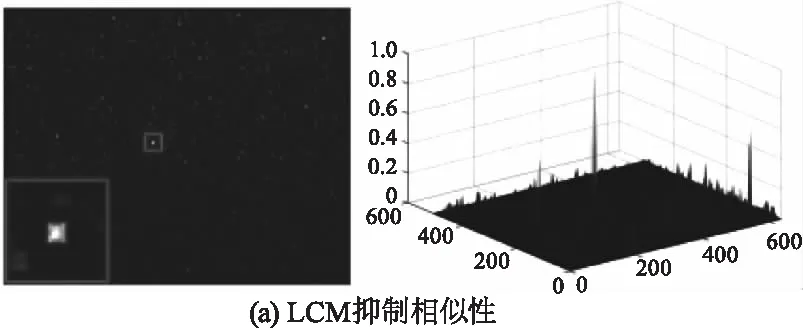
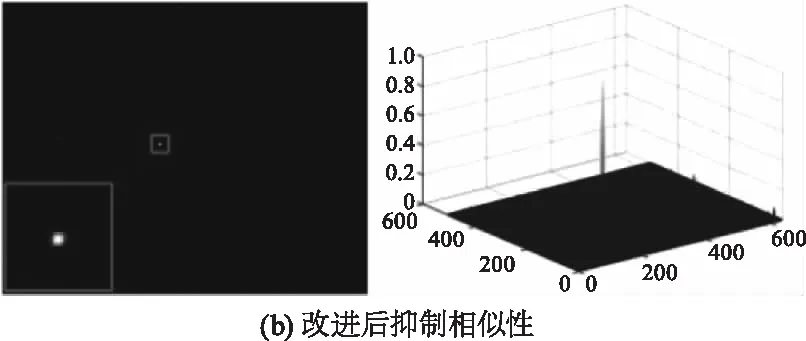
圖5 梯度特征相關性抑制結果
3.3 算法流程
圖6為梯度特征提取結合相似性抑制GFSS(Gradient Feature Similarity Suppression)檢測弱小目標的整體算法流程。首先在獲得原始圖像x與y梯度后,通過圖3所示模板提取x與y方向的梯度特征,之后通過式(11)~(12)改進的LCM算法分別抑制兩個方向梯度特征相似性,消除殘余背景,最后將結果進行融合。融合結果中目標區域得到明顯增強,背景基本被抑制,通過式(13)自適應閾值分割即可將目標與背景分離,其中μ與σ分別為待分割結果的均值與標準差,k為經驗值,通常取[25,40]:
Threshold=μ+kσ
(13)
4 實驗結果
4.1 評價指標與對比算法
常使用信噪比SNR與背景抑制因子SBF評價弱小目標檢測難度與算法背景抑制效果:
(14)
(15)
其中,μt與μb分別表示目標區域與鄰域背景區域均值;σb為背景區域標準差;σin和σout分別為原始圖像和已處理圖像背景區域標準差。SNR越高表明目標信號越強,越容易檢測。包含復雜背景與噪聲的原始圖像通常具有較高的標準差,處理后的圖像背景受到抑制,標準差也會降低,因此BSF值越高表明算法對復雜背景抑制效果越好。
常用檢測率Pd與虛警率Pf來評價算法的檢測性能:
(16)
(17)
在對比實驗中選擇Top-hat算法作為基準對比算法,另外選擇基于對比度的MPCM(Multiscale patch-based contrast measure)算法[14]、Liu等人提出的梯度方向散度加權多尺度通量密度WMFD(Weighted Multiscale Flux Density)算法[15]和加權圖像熵MGDWE(Multiscale Gray Difference Weighted Image Entropy)算法作為對比算法。
4.2 檢測結果
選擇圖7(a1)~(f1)的6組包含弱小目標的不同場景圖像序列進行測試。序列1~4為紅外圖像,背景中包含復雜云層邊界和非均勻性干擾,目標與背景具有不同對比度,序列5、6為實際采集強天光背景的可見光圖像,背景強度過高導致目標完全被淹沒,肉眼難以分辨,且存在嚴重的漸暈現象,這些都對弱小目標檢測帶來極大困難。表1列出6組實驗圖像序列的具體信息,其中CON表示目標與背景對比度,CON值越低表示對比度越弱,檢測難度越大。
(18)
所提算法及對比算法的檢測結果展示在圖7中,圖7(a2)~(a6)依次為Top-hat、MPCM、WMFD、MGDWE和所提算法對圖像序列1的檢測結果,圖7(b)~(c)依次為序列2至序列6檢測結果。

圖6 算法流程

圖7 不同算法對6組序列檢測結果
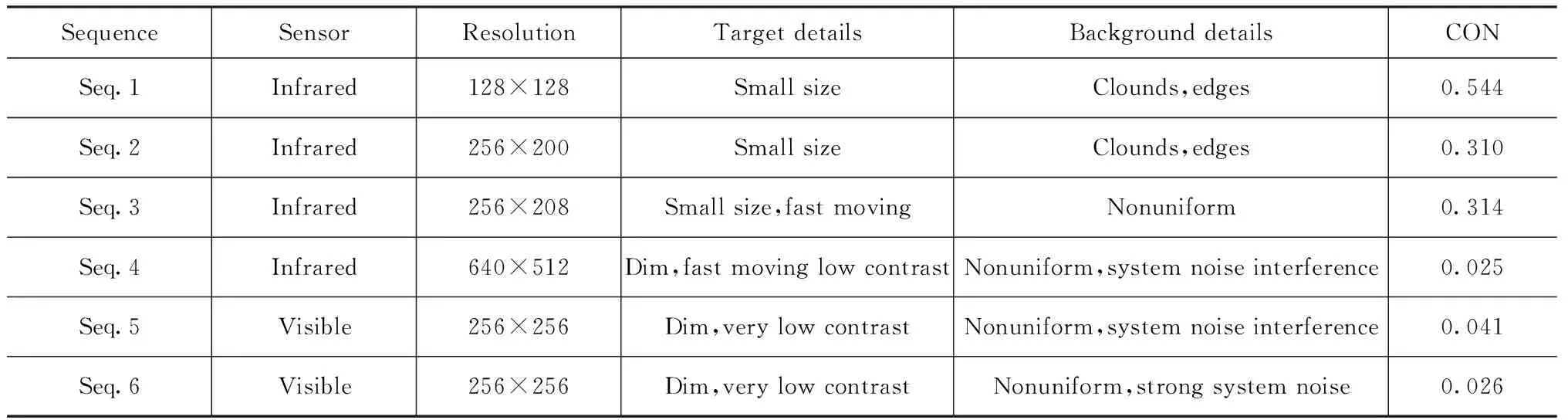
表1 測試圖像具體信息
本文算法對復雜紅外圖像與低信噪比、低對比度的強光背景可見光圖像都有較好的背景抑制和目標增強能力,結果圖中幾乎沒有殘余背景。基于背景建模的Top-hat算法不能有效抑制云層邊緣,其結果中存在大量殘余背景。MPCM沒有考慮到背景本身存在的不連續性(如對序列2同時增強了云層間隙)及目標區域被背景淹沒的情況,導致結果中不僅殘留背景,且未能有效突出低對比度圖像中的目標區域。WMFD和MGDWE一定程度增強低對比度目標,但在序列5與序列6中殘留了由系統噪聲導致的條紋狀背景。
表2與表3分別給出上述算法處理結果的信噪比SNR與背景抑制因子BSF,其中粗體表示最優結果,下劃線為次優結果,“—”表示沒有檢測到目標,未能計算結果。本文所提算法僅序列6的背景抑制因子為次優結果,其余均為最優。通過實驗證明所提算法在背景抑制與目標增強上都優于其他方法,尤其對實際采集的低信噪比、低對比度的場景具有很好的效果,在受嚴重系統噪聲干擾的圖像序列序列4、5、6上的檢測結果證明算法對噪聲具有一定抗干擾能力。
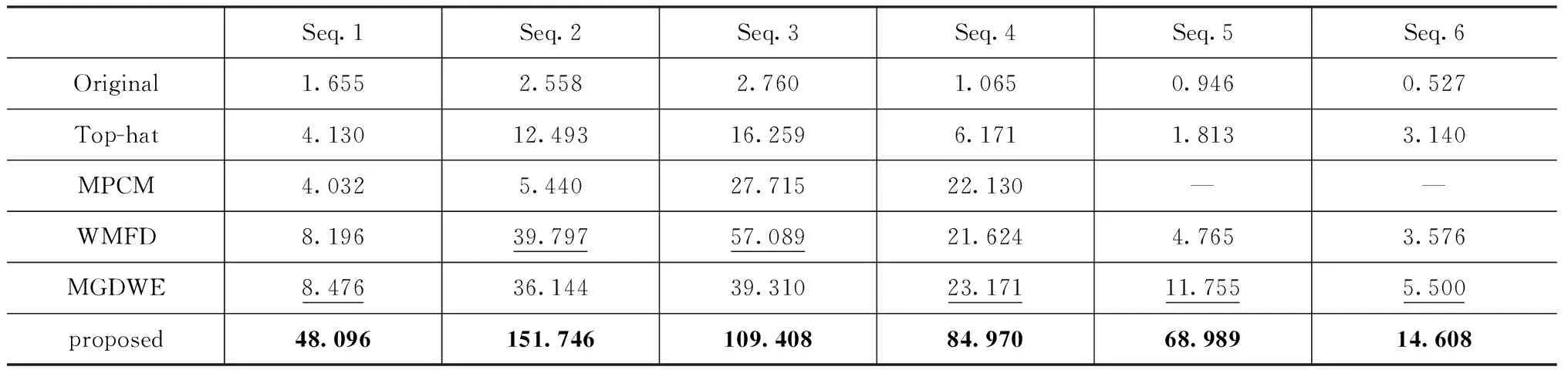
表2 不同算法信噪比
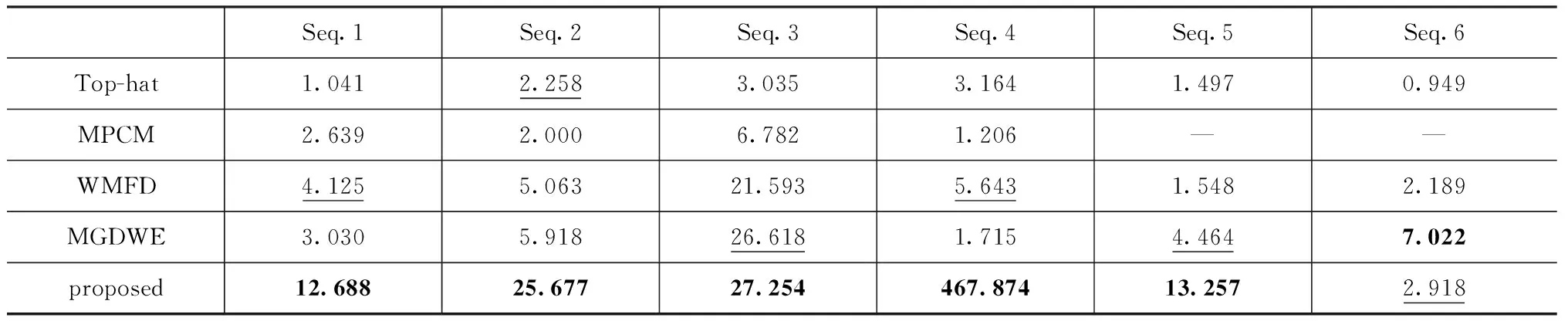
表3 不同算法背景抑制因子
由于MPCM方法未能檢測到序列5與6中的目標,因此只統計各方法在序列1、2、3、4中檢測到的目標個數與誤檢數,計算檢測率與虛警率。序列1至4共有542幀圖像,共包含542個弱小目標,不同方法的檢測率與虛警率見表4。
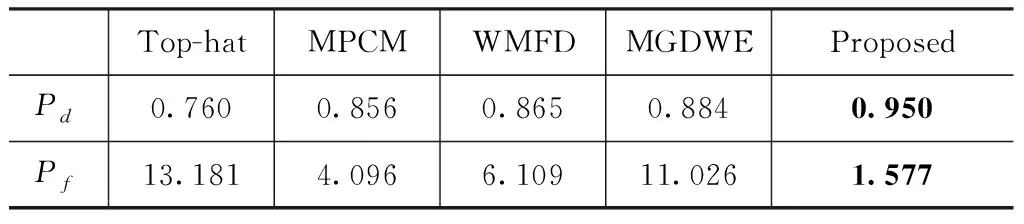
表4 檢測率與虛警率
運行時間的對比實驗在計算機CPUi5,1.8GHz、RAM4GB上進行,所有方法均在Matlab平臺實現,結果見表5。序列4圖像分辨率較高,本算法及各對比算法在該序列上耗時較長。本文所提方法通過濾波方式提取梯度特征,運行時間僅次于MGDWE算法,對不同場景檢測所需時間均為毫秒級,可以滿足實際應用中的實時性要求。
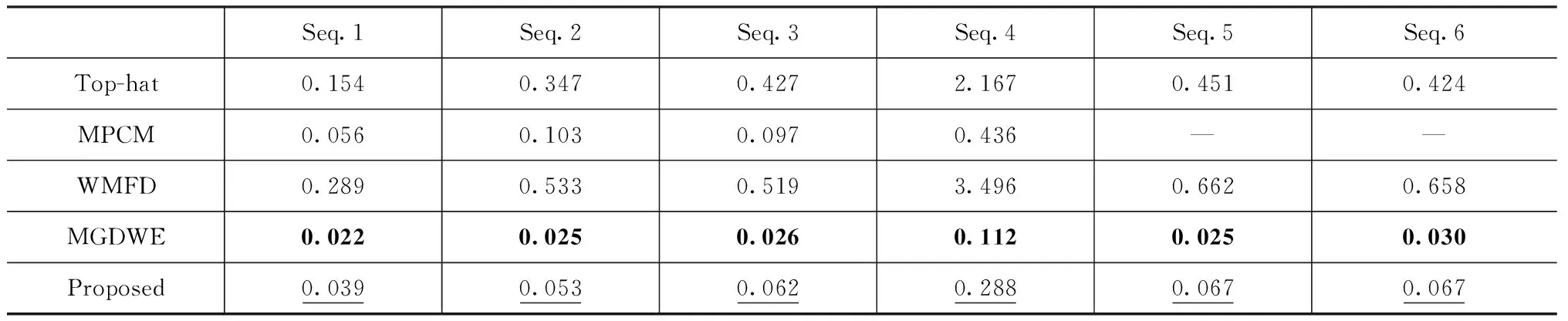
表5 運行時間對比結果 (單位:s)
5 結 論
本文通過分析弱小目標結構特征,針對低對比度圖像提出一種基于梯度特征提取的單幀弱小目標檢測方法,并對得到的方向梯度特征抑制相似度,從而消除方向梯度特征中的連續邊緣背景,通過融合兩個方向梯度特征,進一步抑制背景,增強目標,得到最終的檢測結果。實驗表明,本文所提方法能夠有效檢測含有云層等復雜背景的弱小目標圖像,且對低對比度場景的紅外與可見光圖像檢測效果顯著優于其他算法。通過采用模板對方向梯度濾波獲得梯度特征的方法,簡化了算法結構,節省運行時間,滿足實時性要求。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
當代陜西(2020年14期)2021-01-08 09:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12