電荷泵鎖相環(huán)電路建模與仿真
2022-03-05 09:03:00曾兆權(quán)龔立嬌李紅躍
自動(dòng)化與儀表 2022年2期
關(guān)鍵詞:信號(hào)
曾兆權(quán),龔立嬌,2,李紅躍
(1.石河子大學(xué) 機(jī)械電氣工程學(xué)院,石河子832000;2.石河子大學(xué) 農(nóng)業(yè)農(nóng)村部西北農(nóng)業(yè)裝備重點(diǎn)實(shí)驗(yàn)室,石河子832000;3.新疆天富檢測(cè)有限公司,石河子832000)
鎖相環(huán)(phase-locked loops,PLL)是利用負(fù)反饋控制原理實(shí)現(xiàn)頻率及相位的控制系統(tǒng)[1]。其作用是將電路輸出的信號(hào)與其外部的參考信號(hào)保持同步,當(dāng)參考信號(hào)的頻率或相位發(fā)生改變時(shí),鎖相環(huán)會(huì)檢測(cè)到這種變化,并且通過(guò)其內(nèi)部的反饋系統(tǒng)來(lái)調(diào)節(jié)輸出頻率,直到兩者重新同步鎖相。
鎖相環(huán)的分類(lèi)具有多樣性。按照其實(shí)現(xiàn)技術(shù)可分為模擬鎖相環(huán)和數(shù)字鎖相環(huán)[2-5]。按照其反饋回路的特點(diǎn)可分為整數(shù)倍分頻鎖相環(huán)(Integer-N PLL)和分?jǐn)?shù)倍分頻鎖相環(huán)(Fractional-N PLL)。按照鎖相環(huán)鑒頻鑒相器的實(shí)現(xiàn)方式,可以分為電荷泵鎖相環(huán)(Charge-Pump PLL)和非電荷泵鎖相環(huán)。按照其環(huán)路的帶寬,它可以分為寬帶鎖相環(huán)(Wide band loop PLL)和窄帶鎖相環(huán)(Narrow band loop PLL)[2-5]。
電荷泵鎖相環(huán)是一種鑒頻鑒相器適用于方波輸入信號(hào)的鎖相回路。該類(lèi)型鎖相環(huán)的特點(diǎn)是可以快速的鎖定到輸入信號(hào)的相位,達(dá)到很低的穩(wěn)態(tài)相位誤差[1]。因此,該類(lèi)型鎖相環(huán)被廣泛地應(yīng)用于各類(lèi)型電子設(shè)備中,成為音頻、視頻、通信、導(dǎo)航等各種裝置的重要組成部分。
電荷泵鎖相環(huán)電路具有負(fù)反饋閉環(huán)系統(tǒng)所具有的系統(tǒng)狀態(tài)多、工作特性復(fù)雜的特點(diǎn),其設(shè)計(jì)與仿真分析一直是電子設(shè)備時(shí)鐘系統(tǒng)的難點(diǎn)問(wèn)題[4-5]。
針對(duì)上述問(wèn)題,本文研究了電荷泵鎖相環(huán)電路的設(shè)計(jì)步驟與仿真分析方法。首先,推導(dǎo)電荷泵鎖相環(huán)各模塊的數(shù)學(xué)模型;其次,建立了各模塊電路仿真模型,仿真分析了環(huán)路穩(wěn)定性以及各模塊對(duì)環(huán)路整體性能的影響。研究結(jié)果為電荷泵鎖相環(huán)電路的設(shè)計(jì)與仿真提供了理論依據(jù),對(duì)實(shí)際電路設(shè)計(jì)具有一定參考價(jià)值。
1 電荷泵鎖相環(huán)數(shù)學(xué)模型
如圖1所示,電荷泵鎖相環(huán)鑒頻鑒相器(PFD)、電荷泵(CP)、環(huán)路濾波器(LP)、壓控振蕩器(VCO)以及1/N分頻器(Divider)構(gòu)成。
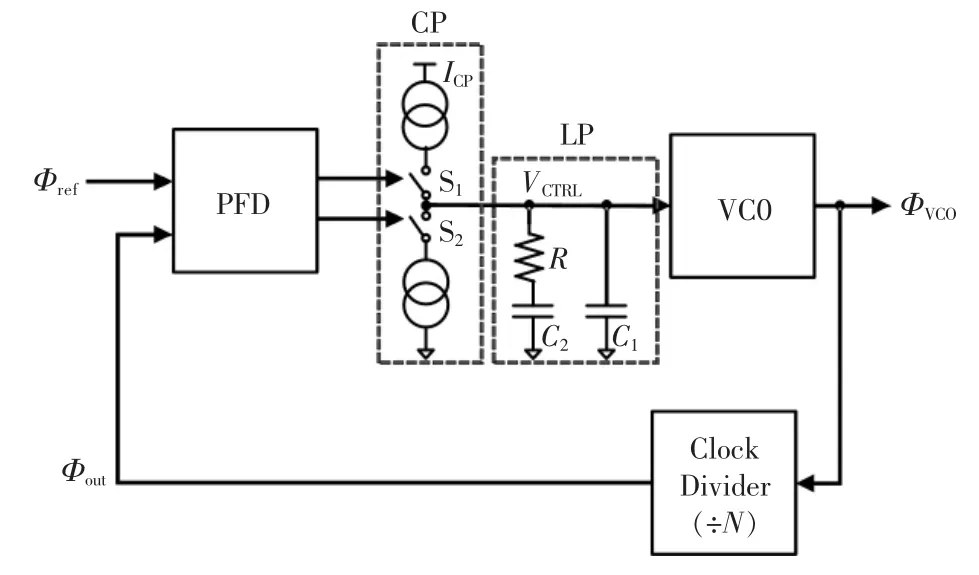
圖1 電荷泵鎖相環(huán)系統(tǒng)框圖Fig.1 Charge pump PLL system diagram
參考信號(hào)?ref與輸出信號(hào)經(jīng)過(guò)鑒頻鑒相器比較得到的兩路信號(hào)分別控制電荷泵開(kāi)關(guān)S1與S2,根據(jù)頻率相位比較結(jié)果對(duì)環(huán)路濾波器內(nèi)電容C1與C2進(jìn)行充放電進(jìn)而改變VCTRL的大小,控制VCO 產(chǎn)生和輸入?yún)⒖夹盘?hào)同頻率同相位的輸出信號(hào)。
1.1 鑒頻鑒相器與電荷泵
鑒頻鑒相器是電荷泵鎖相環(huán)輸入信號(hào)所進(jìn)入的第一個(gè)模塊,它將鎖相環(huán)輸出信號(hào)與輸入?yún)⒖夹盘?hào)進(jìn)行頻率相位比較得到控制信號(hào)。如圖2所示,電荷泵鎖相環(huán)的鑒頻鑒相器由2 個(gè)D 觸發(fā)器以及1個(gè)與門(mén)組成。其中,REF 為輸入?yún)⒖紩r(shí)鐘信號(hào),DIV是經(jīng)由分頻器進(jìn)行1/N降頻后反饋至鑒頻鑒相器的時(shí)鐘信號(hào)。當(dāng)REF 領(lǐng)先于DIV 時(shí),UP 端輸出高電平,DN 輸出低電平;當(dāng)DIV 領(lǐng)先于REF 時(shí),UP 輸出低電平,DN 輸出高電平。PFD 的作用是輸出一個(gè)和REF 與DIV 之間相位差成線(xiàn)性關(guān)系的電壓誤差信號(hào)E(t),即:
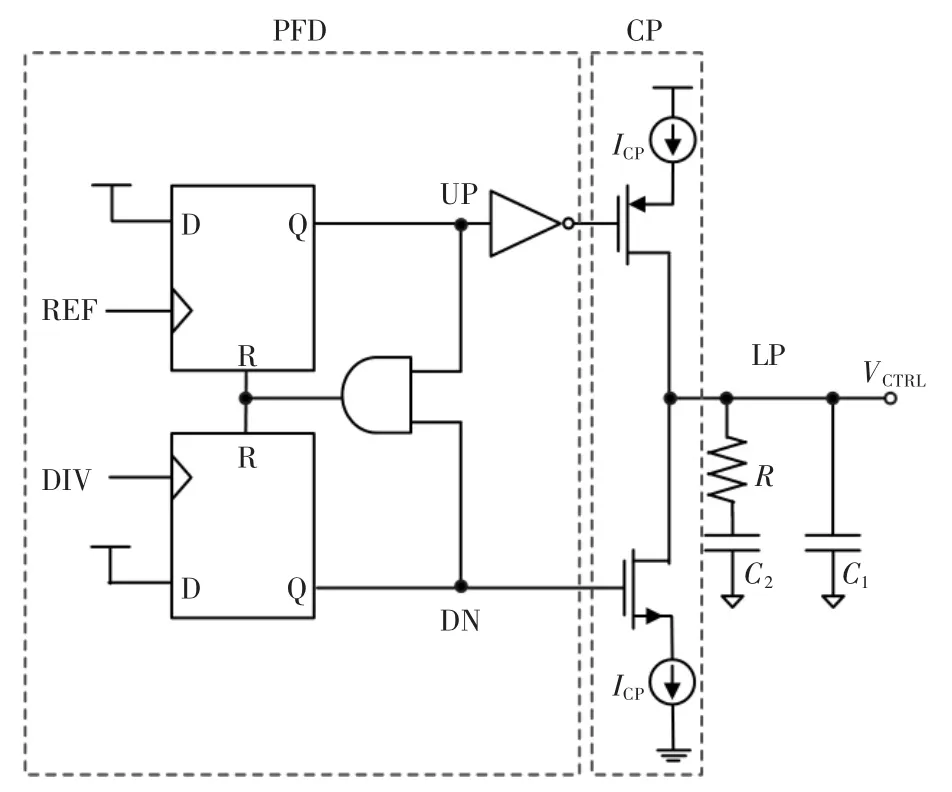
圖2 電荷泵鎖相環(huán)鑒頻鑒相器Fig.2 Charge pump PLL PFD

式中:KPD是PFD 增益;Φref(s)是參考時(shí)鐘相位;ΦDiv(s)是隨時(shí)間變化的反饋時(shí)鐘信號(hào)相位。需要特別說(shuō)明的是,E(s)與Φref(s)-ΦDiv(s)之間的關(guān)系嚴(yán)格意義上說(shuō)是非線(xiàn)性的。當(dāng)Φref(s)-ΦDiv(s)=2π 時(shí)(REF 領(lǐng)先DIV 一個(gè)周期),E(t)的平均值為1;當(dāng)時(shí)Φref(s)-ΦDiv(s)=-2π(REF 落后DIV 一個(gè)周期),E(t)的平均值為-1。Φref(s)-ΦDiv(s)介于[-2π,2π]之間時(shí),可以近似地認(rèn)為Φref(s)-ΦDiv(s)與E(t)的關(guān)系是線(xiàn)性的,即式(1)E(s)≈KPD(Φref(s)-ΦDiv(s))。如上所述,可得到PFD 傳輸函數(shù)為

為了將PFD 所產(chǎn)生的相位誤差信號(hào)E(s)(數(shù)字邏輯信號(hào))轉(zhuǎn)化成能控制壓控振蕩器工作的電壓信號(hào)(模擬信號(hào)),需要在PFD 與VCO 之間加入濾波模塊。PFD 的輸出E(s)直接輸出給電荷泵,電荷泵再給后續(xù)電阻電容濾波網(wǎng)絡(luò)(C1,C2,R)進(jìn)行充放電(積分),實(shí)現(xiàn)邏輯量到模擬量的轉(zhuǎn)換。對(duì)于相位量而言,電荷泵(不包括后續(xù)的環(huán)路濾波器電容)僅作為一個(gè)增益模塊,提供一個(gè)值為ICP大小的增益。因此,PFD 與電流泵相結(jié)合的總傳輸函數(shù)為

1.2 環(huán)路濾波器
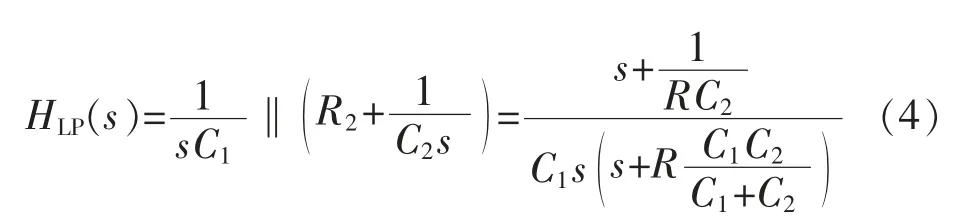
如圖2所示,環(huán)路濾波器由旁路電容C1和RC濾波器R,C2構(gòu)成,根據(jù)電阻電容串并聯(lián)計(jì)算方法,環(huán)路濾波器的S域傳輸函數(shù)為
1.3 壓控振蕩器
理想的VCO 輸出一個(gè)周期振蕩的信號(hào),且該周期信號(hào)的頻率ωout與輸入控制電壓Vcont成線(xiàn)性關(guān)系,即:

式中:ω0是VCO 的固有頻率,即VCO 輸入控制電壓為0 V 時(shí)輸出信號(hào)的頻率;KVCO是VCO 增益,其單位為rad/s·v-1。VCO 作為一個(gè)線(xiàn)性時(shí)不變系統(tǒng),控制電壓Vcont作為系統(tǒng)的輸入,固有頻率成分信號(hào)所對(duì)應(yīng)相位之外輸出信號(hào)的相位Φout(t)作為系統(tǒng)的輸出。因此,對(duì)Vcont在時(shí)間上積分可以得到:

由1.1 節(jié)可知,Vcont是由PFD 產(chǎn)生,經(jīng)過(guò)環(huán)路濾波器濾波后的控制電壓信號(hào),也與頻率ω 和相位有關(guān),因此,對(duì)式(6)兩邊同時(shí)做拉普拉斯變化,根據(jù)拉普拉斯變換在時(shí)域積分的性質(zhì)得到VCO 的傳輸函數(shù)為

1.4 分頻器
分頻器的功能是將VCO 的輸出信號(hào)頻率降為其原有頻率的1/N,再反饋給PFD。
分頻器本質(zhì)上是一個(gè)計(jì)數(shù)器(counter),即計(jì)數(shù)到N后觸發(fā)產(chǎn)生一個(gè)脈沖。N為分頻倍數(shù),即輸出頻率為輸入頻率的1/N,本文中N為一個(gè)正整數(shù)。Out(t)為VCO 的輸出信號(hào),分頻器的輸入信號(hào),Div(t)為分頻器的輸出信號(hào)。
分頻器的輸入與輸出頻率在時(shí)域上滿(mǎn)足以下關(guān)系:

式中:Fdiv為分頻器的輸出頻率;Fout為VCO 的輸出信號(hào)頻率。對(duì)式(8)兩端在時(shí)域上進(jìn)行積分可得到分頻器輸入與輸出相位的關(guān)系為

因?yàn)榉诸l器是對(duì)輸入頻率和相位進(jìn)行一個(gè)1/N的變換,因此,在S域上分頻器的傳輸函數(shù)為

1.5 環(huán)路增益與相位裕度
由式(3)、式(4)、式(7)和式(10)可以得到電荷泵鎖相環(huán)的環(huán)路增益(Loop Gain)為
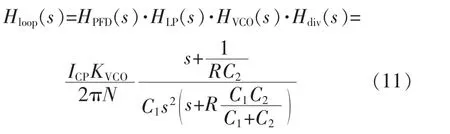
進(jìn)一步根據(jù)反饋系統(tǒng)閉環(huán)增益的定義可得到電流泵鎖相環(huán)的閉環(huán)增益為

由式(11)可知,電荷泵鎖相環(huán)共有3 個(gè)極點(diǎn)和1 個(gè)零點(diǎn)[6]。令式(11)分子為0,求得零點(diǎn)頻率為;令式(11)分母為0,求得兩極點(diǎn)頻率為0,即ωp1,p2=0。第3 個(gè)極點(diǎn)的頻率為。因此,可以得到電荷泵鎖相環(huán)幅頻相頻特性波特圖,如圖3所示。其中,ωz為零點(diǎn)頻率;ωUGB為單位增益帶寬頻率,即環(huán)路增益為0 dB 時(shí)所對(duì)應(yīng)的頻率;ωp3為第3 個(gè)極點(diǎn)的頻率;ΦM為相位裕度。
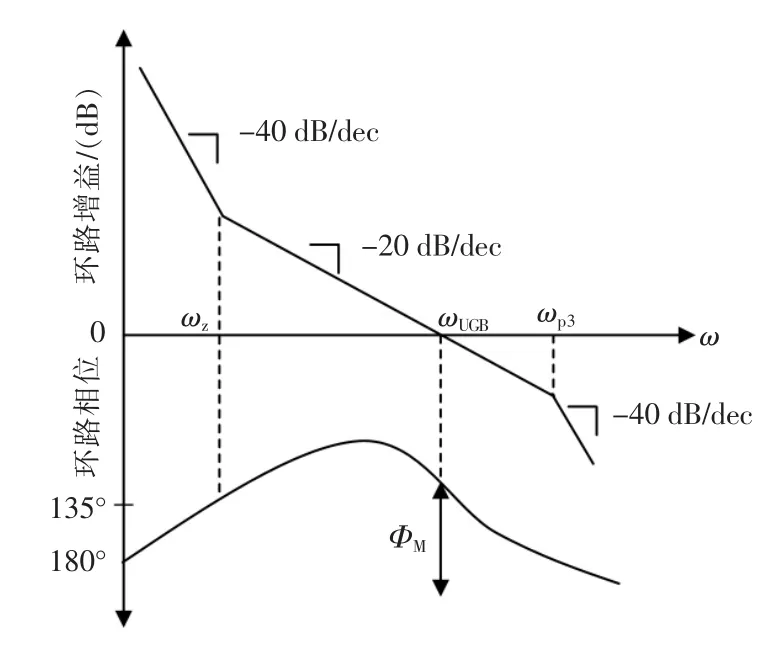
圖3 電荷泵鎖相環(huán)幅頻相頻特性波特圖Fig.3 Bode diagram of charge pump PLL
由式(11)可知電荷泵鎖相環(huán)有2 個(gè)頻率為0的極點(diǎn),再根據(jù)波特圖的性質(zhì),這2 個(gè)直流極點(diǎn)使得環(huán)路增益從0 Hz 開(kāi)始以-40 dB/dec 的速度下降(如圖3),直至經(jīng)過(guò)第一個(gè)零點(diǎn)頻率ωz。同樣根據(jù)波特圖的性質(zhì),這兩個(gè)直流極點(diǎn)使得環(huán)路相位從-180°開(kāi)始(如圖3)。零點(diǎn)(ωz)可以在幅頻上貢獻(xiàn)+20 dB/dec,在相頻上貢獻(xiàn)+90°,使得幅頻和相頻特性曲線(xiàn)上翹。第3 個(gè)極點(diǎn)在幅頻上貢獻(xiàn)-20 dB/dec,在相頻上貢獻(xiàn)-90°,再次使幅頻特性曲線(xiàn)以-40 dB/dec 下降,相頻特性曲線(xiàn)再下移90°[6]。觀察圖3 可知,為了使電荷泵鎖相環(huán)這個(gè)三階系統(tǒng)穩(wěn)定,第3 個(gè)極點(diǎn)的頻率ωp3必須高于單位增益帶寬頻率ωUGB。
根據(jù)波特圖相位圖的定義以及相位裕度的定義,可以得到電荷泵鎖相環(huán)的相位裕度(phase margin,PM)為
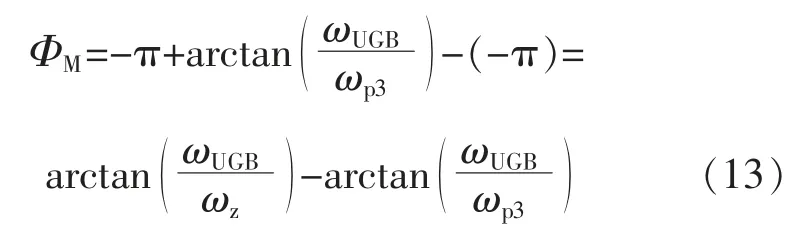
式中:第1 項(xiàng)-π 是由2 個(gè)直流極點(diǎn)所引入的相位偏移;第2 項(xiàng)是由零點(diǎn)ωz引入的正相位偏移;第3 項(xiàng)是由第3 個(gè)極點(diǎn)ωp3引入的負(fù)相位偏移;最后一項(xiàng)-(-π)則是相位裕度的定義規(guī)定的。根據(jù)三角函數(shù)的性質(zhì)arctanA-,式(13)可以進(jìn)一步展開(kāi)為
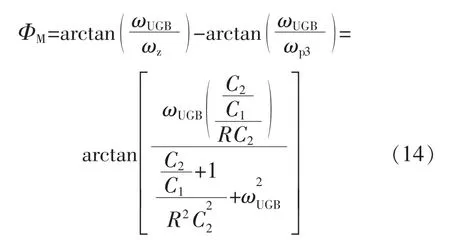
對(duì)式(14)中ωUGB求一階導(dǎo)數(shù),并令其為0 可得到:
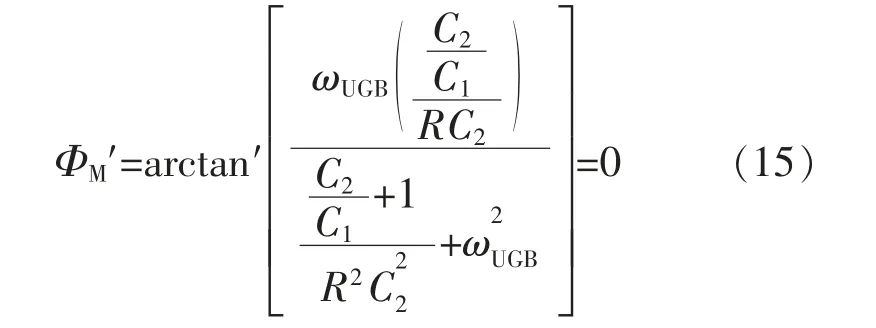
求解式(15)可得到相位裕度ΦM最大時(shí)所對(duì)應(yīng)的單位帶寬增益ωUGB為

將式(16)代入式(14)中,可得到最大相位裕度為
進(jìn)一步可得到和的關(guān)系為

至此,若給定單位增益帶寬ωUGB和相位裕度ΦM,以及N和KVCO,即可通過(guò)式(11)、式(16)、式(17)和式(18)求得R,C1,C2以及Icp的值。
1.6 電荷泵鎖相環(huán)設(shè)計(jì)步驟
用于某高保真數(shù)字音頻系統(tǒng)時(shí)鐘的電荷泵鎖相環(huán)參數(shù)如表1所示。
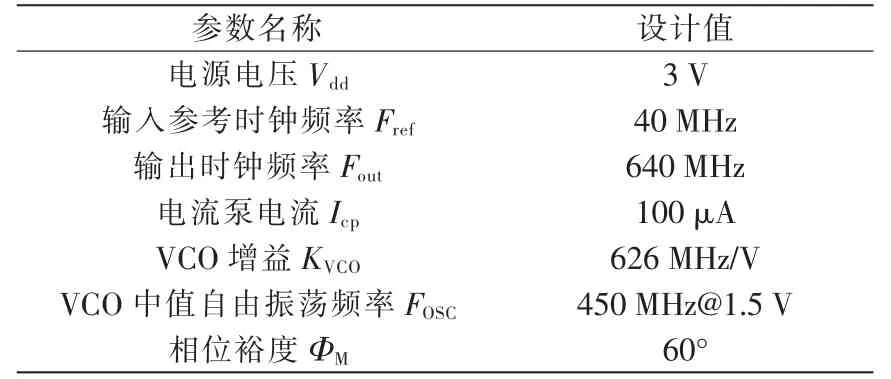
表1 高保真數(shù)字音頻系統(tǒng)電荷泵鎖相環(huán)參數(shù)Tab.1 Parameters of charge pump PLL in high-fidelity digital audio applications
根據(jù)第1.5 節(jié)所推導(dǎo)的電荷泵鎖相環(huán)數(shù)學(xué)模型來(lái)計(jì)算參數(shù)N,R,C1,C2使得電荷泵滿(mǎn)足設(shè)計(jì)要求且穩(wěn)定,設(shè)計(jì)計(jì)算步驟總結(jié)如下:
步驟1計(jì)算分頻器倍數(shù)=16。
步驟2單位增益帶寬頻率ωUGB一般為鎖相環(huán)輸入?yún)⒖碱l率Fref的1/20。因此可得。
步驟3由圖3 可知,電荷泵鎖相環(huán)的相位裕度ΦM主要受位于原點(diǎn)的2 個(gè)直流極點(diǎn)以及1 個(gè)零點(diǎn)所影響。為簡(jiǎn)化計(jì)算過(guò)程,忽略圖3 中第3 個(gè)高頻極點(diǎn)的影響,因此式(14)可簡(jiǎn)化為

步驟4電容C1主要用于濾除電荷泵輸出電壓的細(xì)小波紋,對(duì)整個(gè)環(huán)路的穩(wěn)定性影響較小。因此,為了簡(jiǎn)化計(jì)算過(guò)程,可以暫時(shí)忽略C1。式(11)中鎖相環(huán)環(huán)路增益可簡(jiǎn)化為進(jìn)一步對(duì)式(20)取模可得

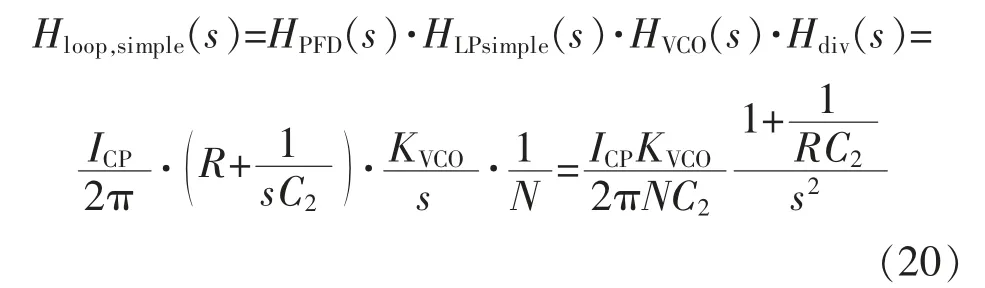
將ωUGB=2π·2 MHz,ICP=100 μA,KVCO=626 MHz/V及RC2的值代入,可得R≈2.8 kΩ。
步驟5將式(21)中結(jié)果代入式(18)可以得。
步驟6由式(18)計(jì)算可得C1的值選擇約為C2的1/10,即C1=0.1,C2=5 pF。
至此,一個(gè)三階電荷泵鎖相環(huán)電路的系統(tǒng)設(shè)計(jì)完成。
2 電荷泵鎖相環(huán)計(jì)算機(jī)建模與仿真
按照上文推導(dǎo)電荷泵鎖相環(huán)數(shù)學(xué)模型所搭建的電流泵鎖相環(huán)Simulink 仿真模型,如圖4所示,由脈沖產(chǎn)生器、鑒頻鑒相器(PFD)、電流泵(CP)、環(huán)路濾波(LPF)、壓控振蕩器(VCO)、示波器、反饋回路分頻器組成。其中仿真模型中的參數(shù)與表1所示參數(shù)值相同。
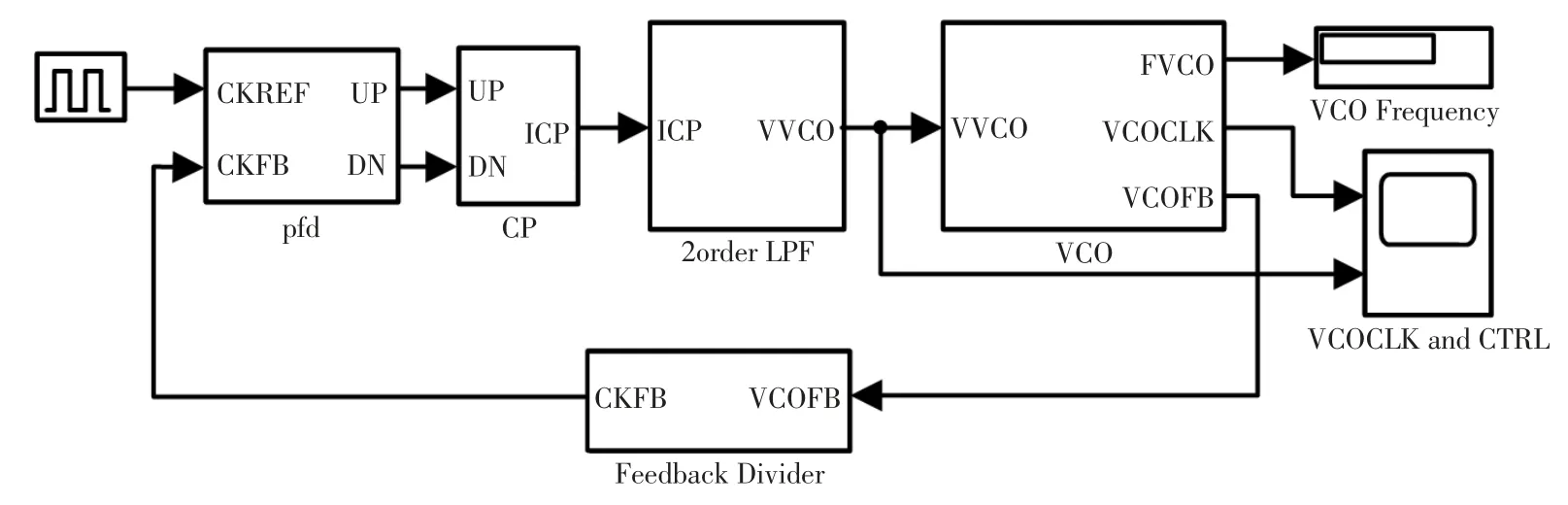
圖4 電荷泵鎖相環(huán)Simulink 仿真模型Fig.4 Simulink model of charge pump PLL
2.1 鑒頻鑒相器仿真模型
鑒頻鑒相器Simulink 仿真模型如圖5所示。由2 個(gè)D 觸發(fā)器(D Flip-Flop)和1 個(gè)與非門(mén)(NAND)以及1 個(gè)記憶單元(Memory)構(gòu)成。其中CKREF 為參考時(shí)鐘信號(hào),CKFB 為經(jīng)過(guò)分頻器輸出的反饋時(shí)鐘信號(hào),記憶單元用于模擬鑒頻鑒相器環(huán)路的延遲。
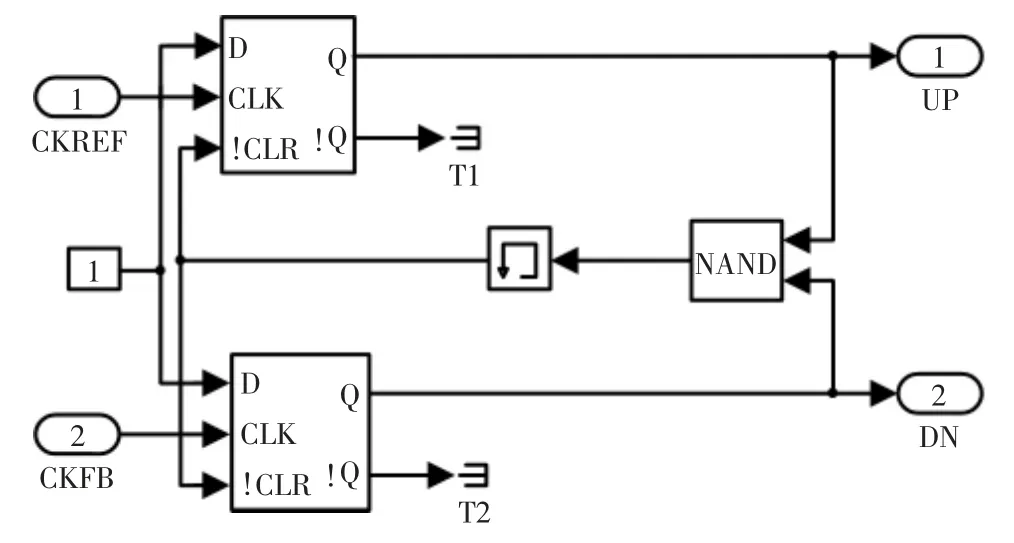
圖5 鑒頻鑒相器Simulink 仿真模型Fig.5 Simulink model of PFD
2.2 電荷泵仿真模型
電荷泵Simulink 仿真模型如圖6所示,由加法器、減法器、二選一開(kāi)關(guān)(Switch)、乘法器(Product)構(gòu)成。其中Constants 為Simulink 中的常數(shù)模塊,常數(shù)ICP 代表電荷泵的電流值(Icp=100 μA),IMIS 代表電荷泵的失配參數(shù),理想狀況下IMIS值為0。
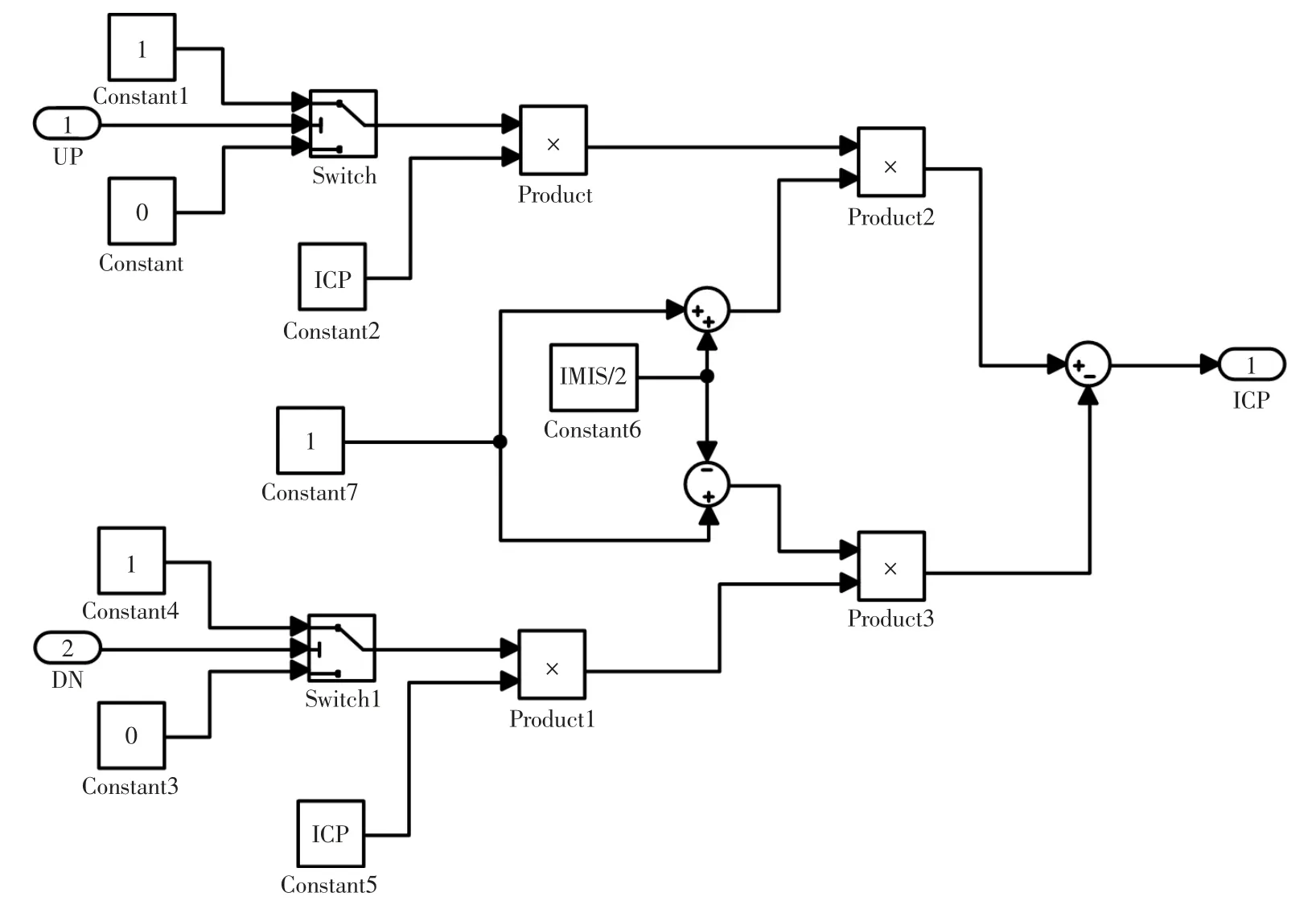
圖6 電荷泵Simulink 仿真模型Fig.6 Simulink model of charge pump
2.3 環(huán)路濾波器Simulink 仿真模型
環(huán)路濾波器Simulink 仿真模型如圖7所示,采用Simulink 中的傳輸函數(shù)模塊(Transfer Function),傳輸函數(shù)與式(4)相同,數(shù)值與1.6 節(jié)中步驟4~步驟6 所得到數(shù)值相同。
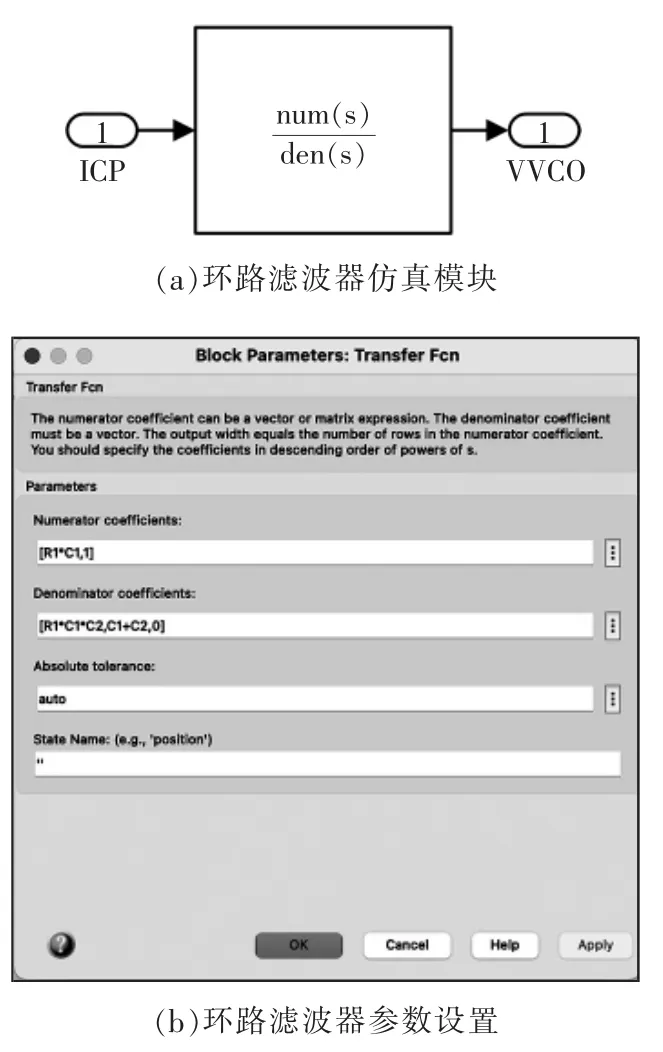
圖7 環(huán)路濾波器Simulink 仿真模型Fig.7 Simulink model of loop filter
2.4 壓控振蕩器仿真模型
壓控振蕩器仿真模型如圖8所示,其中常數(shù)VTH 為VCO 的開(kāi)啟電壓(Turn-on Voltage),一般設(shè)置為中值電壓的一半,在此即為0.75 V。增益Gain為VCO 增益KVCO=626 MHz/V,常數(shù)Fint為VCO 的空跑頻率即中值自由震蕩頻率,由表1 可知為450 MHz,增益Gain2 為VCO 運(yùn)行電壓的一半,即1.5 V。輸入給VCO 的電壓信號(hào)VVCO首先減去VTH 判斷是否達(dá)到開(kāi)啟電壓,隨后乘以VCO 增益,再加上Fint得到VCO 運(yùn)行頻率。運(yùn)行頻率再通過(guò)增益Gain1,積分器(Integrator),以及正弦波產(chǎn)生函數(shù)(Trigonometric Function)轉(zhuǎn)變?yōu)閂CO 運(yùn)行頻率所對(duì)應(yīng)的正弦信號(hào),之后通過(guò)量化模塊(Sign)和增益Gain2 轉(zhuǎn)變?yōu)榉讲ㄝ敵鯲COCLK。在此過(guò)程中,F(xiàn)VCO 為VCO 輸出信號(hào)的頻率信息,VCOFB 為輸出給分頻器模塊的VCO 輸出相位信號(hào)。
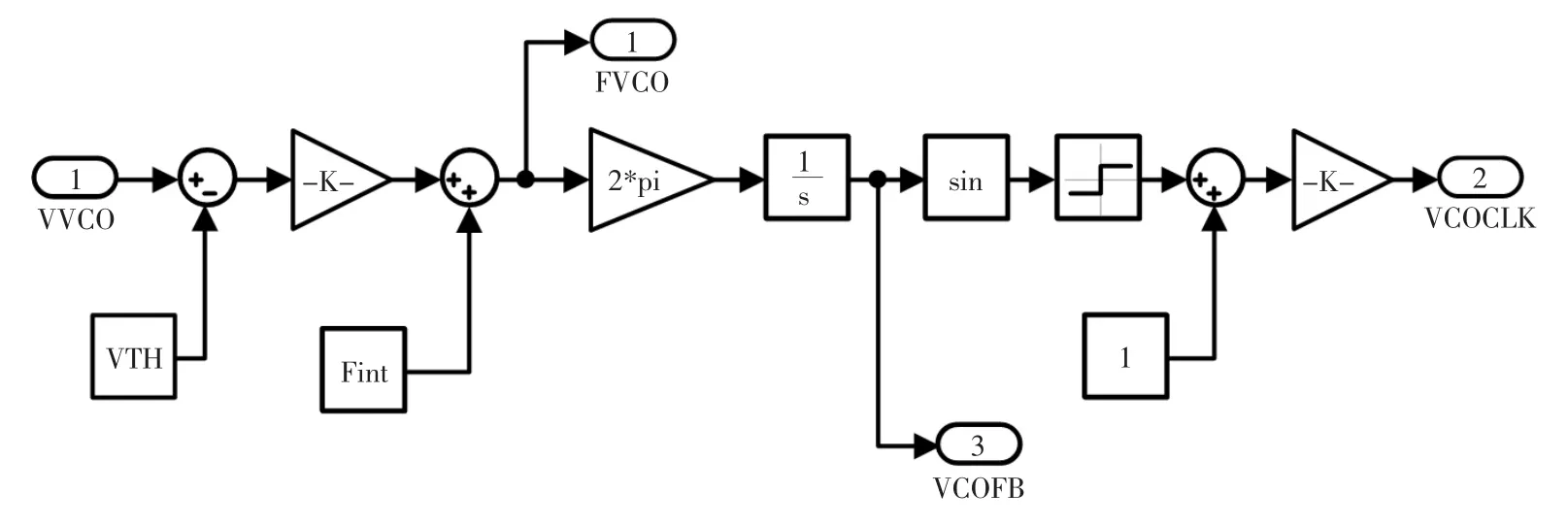
圖8 壓控振蕩器仿真模型Fig.8 Simulink model of VCO
2.5 反饋回路分頻器仿真模型
分頻器Simulink 仿真模型如圖9所示,VCO 輸出的相位信號(hào)VCOFB 首先除以分頻倍數(shù)N=16,隨后通過(guò)正弦波發(fā)生模塊(sin)和量化模塊以及1/2 增益模塊轉(zhuǎn)變?yōu)檩敵龇讲〞r(shí)鐘信號(hào)CKFB。
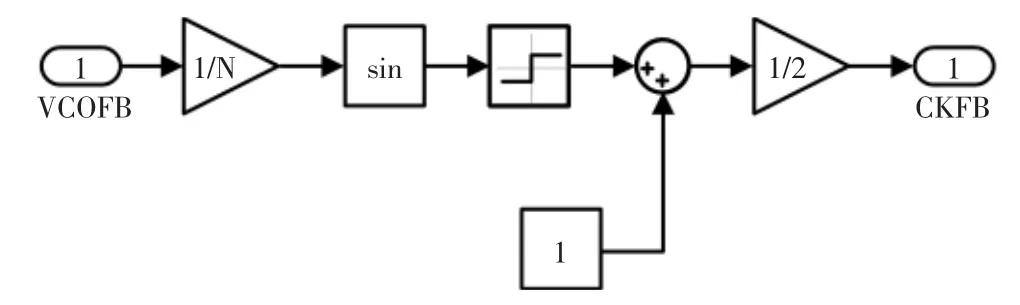
圖9 分頻器Simulink 仿真模型Fig.9 Simulink model of frequency divider
3 仿真結(jié)果
如圖10所示,電荷泵鎖相環(huán)環(huán)路濾波器輸出信號(hào)在初始1.5 μs 左右穩(wěn)定,表明鎖相環(huán)環(huán)路達(dá)到鎖定狀態(tài)。
如圖11所示,經(jīng)測(cè)量鎖定后電荷泵鎖相環(huán)輸出時(shí)鐘信號(hào)的周期約為1.56 ns,即輸出時(shí)鐘頻率為640 MHz,與預(yù)期設(shè)計(jì)指標(biāo)相吻合,表明電荷泵鎖相環(huán)達(dá)到設(shè)計(jì)要求。
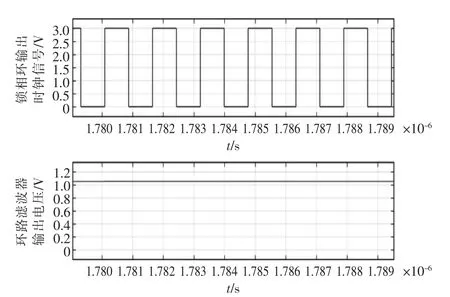
圖11 鎖定后電荷泵鎖相環(huán)輸出時(shí)鐘信號(hào)與環(huán)路濾波輸出信號(hào)Fig.11 Locked output of charge pump PLL and loop filter
如圖12所示,電荷泵鎖相環(huán)輸出信號(hào)頻率是輸入信號(hào)頻率的16 倍,即輸入信號(hào)頻率40 MHz,輸出時(shí)鐘頻率640 MHz。
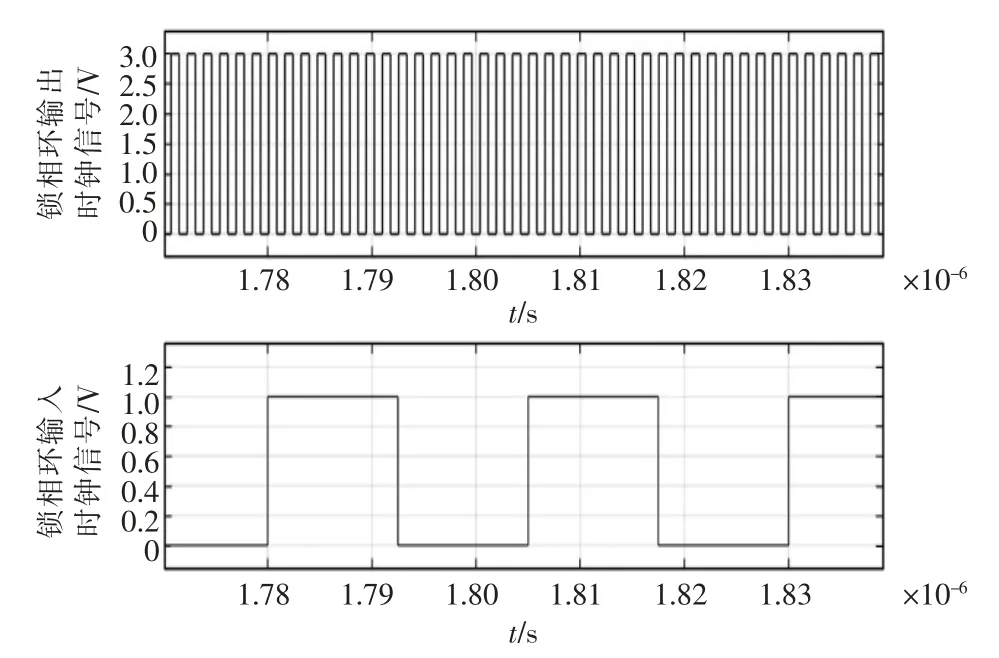
圖12 電荷泵鎖相環(huán)輸出時(shí)鐘信號(hào)與輸入時(shí)鐘信號(hào)對(duì)比Fig.12 Comparison of charge pump PLL output and input clock signal
4 結(jié)語(yǔ)
電荷泵鎖相環(huán)電路的設(shè)計(jì)與仿真分析是電子設(shè)備時(shí)鐘系統(tǒng)的重難點(diǎn)。本文針對(duì)典型電荷泵鎖相環(huán),推導(dǎo)了其各模塊以及整體系統(tǒng)的數(shù)學(xué)模型,在此基礎(chǔ)上,建立了各模塊電路仿真模型,最后仿真驗(yàn)證了環(huán)路穩(wěn)定性。仿真證明了所建立電荷泵鎖相環(huán)數(shù)學(xué)模型的正確性,對(duì)電荷泵鎖相環(huán)實(shí)際電路設(shè)計(jì)具有一定參考價(jià)值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06

- 自動(dòng)化與儀表的其它文章
- 基于物聯(lián)網(wǎng)的實(shí)驗(yàn)室智能門(mén)禁系統(tǒng)研究與設(shè)計(jì)
- 海洋平臺(tái)吊機(jī)軟啟動(dòng)器設(shè)計(jì)應(yīng)用與優(yōu)化研究
- 面向智慧小鎮(zhèn)建設(shè)的機(jī)房電氣管線(xiàn)多目標(biāo)優(yōu)化布置方法
- 核電站一回路介質(zhì)非接觸式監(jiān)測(cè)系統(tǒng)優(yōu)化研究
- 基于LSTM的疏浚管道流速預(yù)測(cè)模型
- 電動(dòng)汽車(chē)非車(chē)載充電機(jī)電能檢測(cè)儀的設(shè)計(jì)