基于ROS系統的SLAM視覺智能勘察小車*
2022-03-07 05:53:10陽映雯陳凱凱余思琪謝詩語趙艷芳
南方農機 2022年5期
陽映雯 ,鄧 鵬 ,陳凱凱 ,余思琪 ,謝詩語 ,趙艷芳
(荊楚理工學院電子信息工程學院,湖北 荊門 448000)
隨著智能化技術的逐漸普及,機器人系統越來越多地運用到了人們生活的各個方面,給人們的日常生活帶來了許多的方便和益處。越來越多的智能移動小車被廣泛應用到人們的日常生活中。它們脫離了連接線纜和固定安裝位置,它們的活動也更加靈活自由,便于幫助人們解決許多生活日常的事情,從而代替人們完成工作。項目小組以自動化工程中機器人綜合智能應用為背景,采用移動機器人作為手段和對象。按復雜工程應用需求進行設計,參考指定場景和具體設計要求,基于機器人操作系統ROS完成具有明確的系統與作業性能要求的智能機器人系統設計過程,包括分工設計、編程開發及集成應用實現、測試、評估及報告。而智能小車被應用到這些任務和工作的關鍵技術是智能小車在勘察任務中的自主導航和智能小車的SLAM地圖的構建。本智能勘察小車通過深度相機來對機器人實時環境進行SLAM地圖構建,在智能小車自主移動的過程中對實時環境進行勘察。通過不斷實驗,確保小車能夠解決在室內執行任務或者遮擋情況下,定位不準確以及區域位置難以識別的問題。
1 系統總體方案設計
該系統的總體分為硬件部分和軟件部分。硬件部分以工控機作為智能小車的上位機,各個傳感器為輔助,且主要傳感器包括深度相機和激光雷達傳感器來對智能勘察小車硬件進行搭建。智能小車在軟件方面主要以Ubuntu系統下的機器人操作系統ROS作為智能勘察小車的大腦,來對智能勘察小車的實時地圖和自主導航進行控制和計算,軟件部分主要包括上位機Ubuntu系統、SLAM地圖的構建、建圖算法和自主導航。通過對智能勘察小車的硬件搭建和軟件設計,實現對智能勘察小車的自主移動和實時勘察功能。主要包括上位機Ubuntu系統中的機器人操作系統ROS和相關建圖算法。采用開源機器人系統ROS,能夠更好地控制小車。上位機界面在ROS操作系統的基礎上進行開發,從而更好地對智能小車的實時移動環境和導航情況進行勘察。最后構建地圖,通過激光SLAM和視覺攝像頭來實現對室內環境的地圖構建[1-2]。
ROS機器人操作平臺具有容易修改和調控以及更方便控制的特點,用于對小車的控制,無疑是較好的選擇。再通過激光SLAM與深度相機聯合ROS的圖形化模擬,就能夠更方便準確地對小車的位置進行定位,然后實行建圖。
2 系統硬件設計
系統的硬件結構包括工控機、深度相機、二維激光雷達、超聲波傳感器、顯示器等。工控機預裝了ROS機器人操作系統。智能小車通過碰撞傳感器和超聲波傳感器在自主移動的過程中采集實時障礙物信息,并將實時障礙物信息傳到工控機,通過工控機來對智能小車在行進過程中遇到的障礙物、臺階及坑洼地段進行判斷。深度相機和二維激光雷達將采集到的地圖信息也傳到工控機,通過工控機來對智能小車的實時地圖進行創建和實時更新。SLAM視覺智能勘察小車硬件組成框圖如圖1所示。
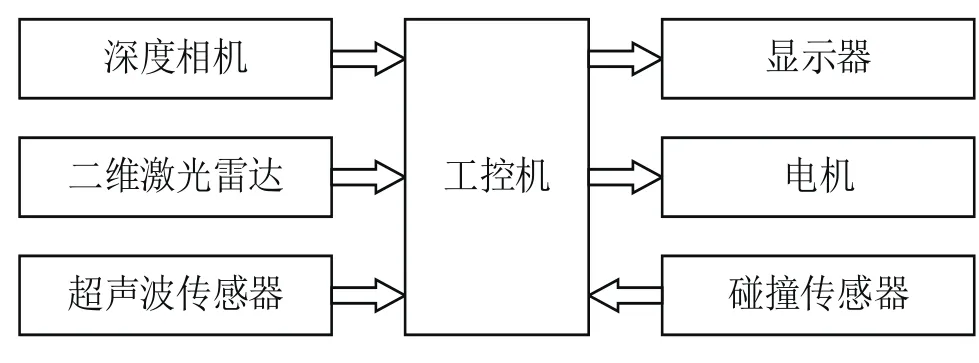
圖1 SLAM視覺智能勘察小車硬件組成框圖
2.1 深度相機
隨著自動駕駛和機器視覺等技術的逐漸發展[3-4],采用深度相機進行行為識別、物體識別以及場景建模的相關發現和應用越來越多。可以說深度相機就是機器人和終端的眼睛,用來檢測目標拍攝環境的環境深度的信息,與普通的相機具有很大的差別。普通的相機所拍攝的圖片僅能看到相機視角內的所有物品并記錄下來,但是對于物品與相機的距離,就不得而知了,沒有確切的數據。本設計中機器人所采用的深度相機為Orbbec深度相機,通過深度相機獲取到的數據,能準確地知道圖像中每個點與相機的距離。因此,加上該點在二維空間上的x、y坐標,就能成功獲取到每個點在三維空間上的位置坐標。最后,通過三維坐標位置就能真實還原真實的小車環境,實現環境的建模處理等工作。本設計中的Orbbec深度相機最遠測試范圍可達8 m,比較適用室內較遠距離的應用場景,支持基本的手勢跟蹤,可以用于手勢識別的人機交互。
2.2 二維激光雷達
隨著智能化技術的不斷發展,在機器人、無人駕駛等領域中都能看到激光雷達的身影。激光雷達是集激光、全球定位系統(GPS)和IMU(慣性測量裝置)三種技術于一體的系統,比起普通雷達,激光雷達具有分辨率高、隱蔽性好、抗干擾能力更強等優勢。隨著激光雷達的應用越來越廣泛,激光雷達的種類也變得越來越多,在功能上有激光測距、激光測速、激光成像、大氣探測、跟蹤雷達等應用。本文設計的倉庫巡邏機器人采用的是思嵐RPLIDAR A1激光雷達。測距范圍為0.15 m~6 m;掃描角度為0~360°;掃描頻率為5 Hz~15 Hz。
2.3 其他傳感器
SLAM視覺智能勘察機器人也可以添加一些其他的傳感器來實現其巡邏的功能。例如,防跌落傳感器利用超聲波進行測試距離,當超聲波測試的距離超過限定值的時候,傳感器就會向控制器發出信號,進而控制器就會發出命令改變機器人運行軌跡;溫濕度傳感器,它是利用探頭作為測溫元件,將溫度和濕度信號采集出來,經過信號調理電路處理后,轉換成信號輸出。同時,SLAM視覺智能勘察機器人通過陀螺儀、里程計、加速度計來獲取機器人的角速度和加速度。將數據傳輸到工控機,由工控機結合二者將其姿態數求出,同時在TF坐標變換中進行計算。
3 系統軟件設計
本激光SLAM視覺智能勘察小車使用開源機器人ROS系統來對小車進行控制操縱。ROS系統是關于控制機器人系統的一個很好的工具,里面包含了多種用于控制機器人系統的軟件包,在編寫相關機器人程序的時候,修改相對應的參數便可實現對相應機器人程序的操作應用。ROS系統包含非常強大的能夠對環境實行模擬化的功能,結合深度攝像頭對相關圖形進行數據的收集,進而實現人體識別,最后可以實現測試相關的距離從而躲避障礙物。
3.1 ROS控制系統設計
ROS控制系統是一個機器人軟件平臺,提供一些標準操作系統服務。例如,底層設備控制,常用功能實現以及數據包管理。目前,ROS主要支持的是Ubuntu系統。ROS可以分成兩層,底層是操作系統層,上層則是各種軟件包,這些軟件包有著各種功能,這些功能主要都來自于使用者在日常生活中所反映的生活所需,如定位建圖、感知、模擬開發等等。
ROS系統包含非常強大的能夠對環境實行模擬化的功能,方便直接實現對機器人小車的控制。ROS也提供了許多容易被調用的功能函數,因此在設計小車系統時可以對應尋找使用相關的功能函數并直接調用,極大地提高了開發效率。并且采用ROS進行控制,可以方便在各個機器人系統之間進行聯合和切換,降低了相關硬件選擇方面的成本。
開源ROS機器人操作平臺具有容易修改和調控以及更方便控制的特點,因此選用它來對小車進行控制與操作,無疑是最好的選擇。再通過激光SLAM與深度相機聯合ROS的圖形化模擬,就能夠更方便準確地對小車的位置進行確定,然后實施建圖。室內自主定位和自主導航仿真圖如圖2所示。
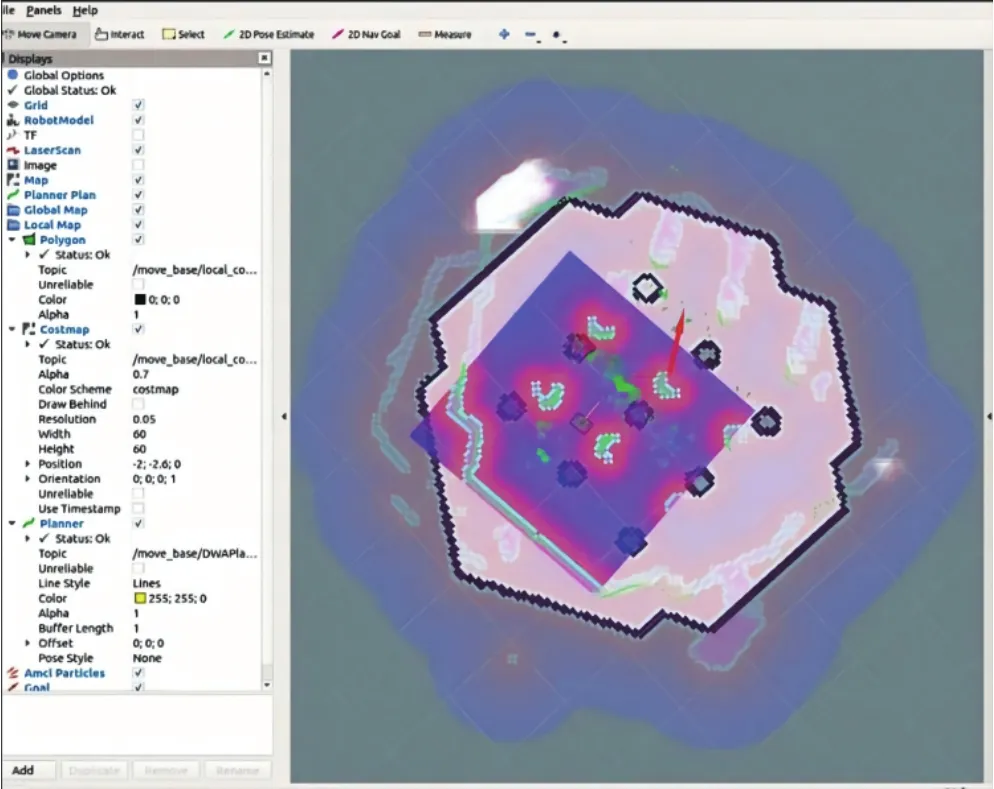
圖2 室內自主定位和自主導航仿真圖
3.2 上機位控制界面設計
要實現對小車實時的移動環境進行檢查,并能夠及時、準確地實現對小車的定位以及對小車進行導航,上位機采用ROS開發了簡易的人機交互界面,相關的運行系統為Ubuntu系統。Ubuntu系統是一個Linux操作系統,它是以桌面應用為主的。Ubuntu系統能夠為一般用戶提供一個最新的且又相當穩定的操作系統,它主要由自由軟件構建而成,并且可供免費使用。
進入Ubuntu系統,掌握小車的實時移動環境以及小車的定位、導航情況。通過ROS系統,可以觀察智能小車在地圖上的位置[5-6]。
3.3 建圖算法
本設計通過激光雷達和視覺攝像頭來對室內外環境進行SLAM地圖構建。目前,SLAM(Simultaneous Localization and Mapping)算法在機器人運動控制和建圖應用中具有重要的地位,SLAM地圖構建主要為激光雷達創建SLAM地圖和視覺攝像頭構建SLAM地圖。由于二維激光雷達無法在坡道和坑洼環境下實現自主定位和實時地圖的構建,所以本設計只要采用視覺攝像頭來對智能勘察小車進行地圖的構建。然而,二維激光雷達適合室內機器人在比較平整的地方移動時使用,在復雜的環境下不適用,例如:倉庫機器人,因為倉儲物流量的增大,傳統二維激光雷達難以滿足要求。對于視覺攝像頭創建SLAM地圖,會受光照環境影響,如逆光、黑暗環境下視覺攝像頭采集的數據會有所欠缺。
SLAM的概念為同步定位與地圖構建,智能勘察小車在從位置環境中向未知地點自主移動的過程,利用運動過程中重復觀測的地圖特征(例如柱子、桌子腿等)來定位自身的位置和姿態,再根據自身來構建地圖,進而達到同步定位和地圖構建的目的。在SLAM建圖中最常用的方法是通過Gmapping方法來實現SLAM地圖的構建,Gmapping是ROS導航包中的二維建圖算法包,Gmapping基于粒子濾波算法,通過對機器人里程計數據獲取粒子群的位姿,然后通過激光雷達采集的數據來構建SLAM地圖。SLAM地圖如圖3所示,圖中點為障礙物。
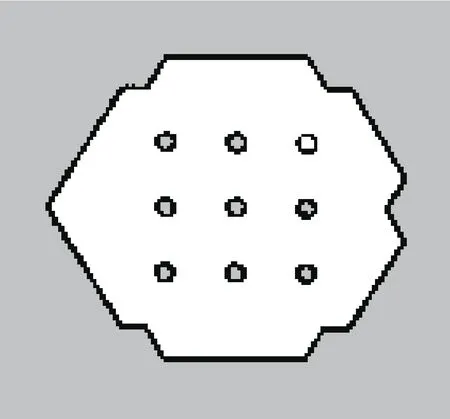
圖3 SLAM地圖
4 系統測試
為了使系統得到的數據更為準確,需要不斷進行實驗檢測,不斷發現該小車系統行駛中出現的問題并及時改正。通過不斷實驗,確保小車能夠解決在室內執行任務或者遮擋情況下,定位不準確以及區域位置難以識別的問題。可以先分模塊單獨進行測驗,在測試過程中,保持一定的WiFi有效距離,盡可能地減小實驗誤差。
4.1 誤差估計
對該系統可能出現的所有誤差進行估計,確保在最后進行實驗數據對比時,能將誤差排除在外,進行正確的數據比對。分模塊進行實驗測試,記錄相應的數據值以及相應的誤差范圍值。在該系統中可能會存在上位機與智能小車的通信距離有限的問題[7-8]。當智能小車與控制終端的距離超過一定范圍時,可能會出現信號收發較差的情況,所以要將這個誤差情況考慮在其中。
4.2 地圖構建
在主控板的終端上執行SLAM構建地圖的命令,小車便會對周圍的環境進行掃描[9-10]。隨即便可將所掃描的區域都加入到構建的地圖中,并將數據上傳至上位機,基本上可以實現數據的實時傳送與地圖的構建。反復進行實驗,直到小車系統所掃描構建的地圖輪廓清楚,與實驗場地的環境基本一致,則說明本次的小車勘察實驗測試成功。當地圖加載成功時,小車在對周圍環境進行掃描并且將相關數據上傳到控制界面時,中途會有一定的延誤時間,但此延誤時間只有零點幾秒,可以忽略,從而基本上可以成功實現對數據的及時傳送以及地圖的構建。當小車系統所構建的地圖輪廓比較清晰,與外圍實驗場地基本一致,則可以說明本次的系統測試成功。
5 結語
本研究提出了一種基于ROS系統的SLAM視覺智能勘察小車設計方案,小車可以實現室內外定位和自主導航功能。在特定的路線下進行自主導航和路線規劃,并進行地圖構建,不斷進行測驗,指導完成實驗目標。該小車可完成視覺智能勘察方案,能夠檢測路面,完成指定路線的行進,掌握視覺智能勘察的控制方法,最后總結得到規律。小車能夠在完成視覺勘察后進行實時地圖的數據采集,將地圖圖像加載成功,加載成功之后通過對實時環境的掃描,智能小車即可在自主移動的過程中建立環境地圖,再將地圖信息上傳到控制界面,最終實現將地圖信息進行實時上傳和對地圖進行完善。通過實驗儀器探究機器人控制算法和ROS操作系統,并通過各方面的學習與運用,不斷地進行實驗測試,從而得到準確的數據,通過大量數據的分析找出可能存在的問題,盡可能地解決掉問題。找出任何可能存在實驗誤差的地方或者可能出錯的地方,仔細進行勘察,盡量減小實驗誤差。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中國生殖健康(2020年6期)2020-02-01 06:28:50
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
