自主水下航行器導航與定位技術
2022-03-07 03:58:32肖家耀XIAOJiayao
價值工程 2022年8期
肖家耀 XIAO Jia-yao
(中海油田服務股份有限公司,天津 300459)
0 引言
眾所周知,海洋所蘊含的自然資源是地球上最豐富的但同時也是人類目前探索最少的地方。隨著人類在利用海洋和開發海洋上的投入不斷增大,自主水下航行器(AUV)引起了越來越多的關注[1],特別是在海洋石油勘探開發領域得到了快速發展。AUV是能夠在水下自主航行、自動控制、并能按照程序預先規劃路徑自主完成預定任務的水下集成系統。導航定位技術是AUV的關鍵技術之一,高精度水下導航定位技術對AUV的安全航行和高效率完成任務具有決定性的作用。
由于無線電信號在水中迅速衰減,AUV無法借助無線電導航系統實現水下遠距離、大范圍的準確定位,衛星導航定位系統在水下不可用是AUV水下導航定位面臨的主要技術挑戰之一。在不使用聲學基線定位系統的情況下,AUV在水下主要依靠自身搭載的羅經、多普勒計程儀(Doppler Velocity Logger,DVL)或慣性導航系統提供的各類導航信息,通過航位推算模式實現水下導航定位。慣性導航/航位推算方法精度受傳感器本身測量精度影響,會隨時間迅速積累。在DVL鎖定海底并且能夠提供有效對地速度輔助導航的情況下,慣性導航/航位推算的導航誤差一般為航行距離的0.5-2%,如果使用高精度的慣性導航設備,導航誤差能夠優于航行距離的0.1%。當在水面時,AUV可以通過GNSS(Global Navigation Satellite System)獲得的絕對位置來實時修正慣性導航系統誤差。但是定時上浮接收GNSS信號來實現對慣性導航誤差的校正在實際應用過程中往往是不現實的,尤其在深水調查作業中。
在過去的二十年間,AUV水下導航定位技術研究取得了實質性的進展。以視覺導航和地磁匹配導航技術為代表的非傳統導航方式逐步開始在水下導航中得到應用,并取得了一定的成果。除此之外,用于解決機器人導航定位的同步定位與地圖構建(Simultaneous Localization and Mapping,SLAM)算法技術日漸成熟,在水下導航定位方面的應用研究也取得了一定的理論和實踐成果[2]。
AUV水下導航定位技術主要可以歸納為以下幾類:
1 慣性導航系統
AUV可以通過測量其行進的距離和方向來確定其在海上的位置,稱為航位推算。航位推算(Dead reckoning)是一種完全依靠自身設備而無需其他定位支持即可自主解決載體當前位置的方法。在航位推算模式下,AUV可以根據其出發點的位置、行進方向和速度或加速度矢量來估計其當前的位置。
慣性導航系統是完全依靠自身設備進行導航的一種無源系統。AUV的初始位置由全球衛星導航定位系統確定,AUV的航向、姿態和加速度信息由慣性測量傳感器實時提供。慣性導航系統綜合以上信息就可以實時解算出AUV在水下的實時位置。本質上,慣性導航屬于一種航位推算導航,即從給定的初始位置開始,根據運動體在該點的航行速度、航行方向和航行時間,推算出下一時刻的位置信息的導航過程。慣性導航系統不依賴任何外界信息,數據更新率搞、短期精度和穩定性好[3],是目前AUV主要的導航定位方式。
慣性導航系統的核心器件為加速度計和陀螺儀。慣性導航系統在正式工作之前,首先要經過初始化對準,使平臺坐標系按導航坐標系定向,為加速度計提供一個高精度的測量基準。在AUV航行過程中,慣性導航系統利用陀螺儀使平臺始終跟蹤當地水平面,三個軸始終指向東、北、垂向方向。在這三個軸上的加速度計分別測量北向加速度ax、東向加速度ay和垂向加速度az。在tk時刻時,將這三個方向上的加速度分量進行一次積分,便可得到AUV沿三個方向的速度分量為:

再次通過對速度積分,即可得到tk時刻AUV在導航坐標系中的絕對位置,即:
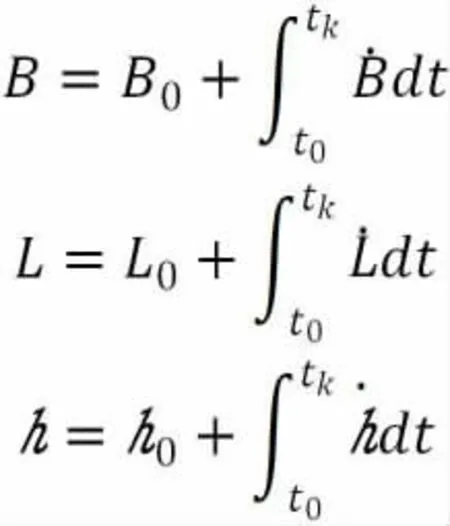
式中,B、L、h為AUV在tk時刻的緯度、經度和高程;B0、L0、h0為AUV在初始時刻t0的位置,可由GNSS提供;B˙、L˙、h˙分別表示緯度、經度和高程的時間變化率,可以由以下公式解算:
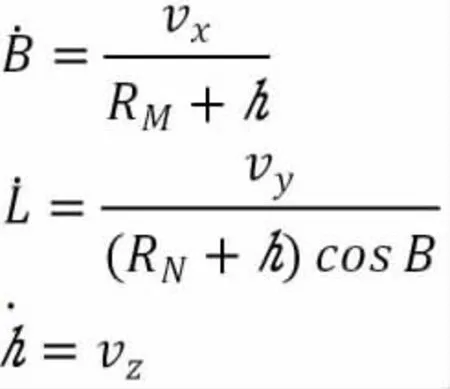
式中RM、RN分別表示地球子午圈、卯酉圈的曲率半徑。
慣性導航主要元件陀螺儀的漂移誤差和加速度計的零位偏值是影響慣導系統精度的最直接的和最重要的因素,會導致慣性導航存在積累誤差,因而難以長時間獨立工作。在實際應用中,通常利用各種外部輔助導航設備,如多普勒計程儀(DVL)等,取長補短,應用現代濾波理論和信息融合技術對慣性導航的累計誤差進行補償。
2 水下聲學定位系統
水下聲學定位是一種重要的水下導航定位方法,具備穩定的高精度定位能力,能夠為各類深海探測裝備提供絕對位置信息[4]。它是通過測量水下聲源所輻射的聲信號從發射到接收所經歷的時間及聲速來確定聲源到各接收點的距離,從而實現對目標進行定位的。但聲學定位存在數據更新率低,延遲較大等缺點,通常與慣性導航定位系統組合應用于AUV中,用于修正慣性導航系統長時間工作后產生的累計誤差。根據定位基線長度,可以將水下聲學定位技術分為三類:長基線(Long Base Line)、短基線(Short Base Line)、超短基線(Ultra Short Base Line)。表1列舉了這三種水聲定位技術的典型基線長度。
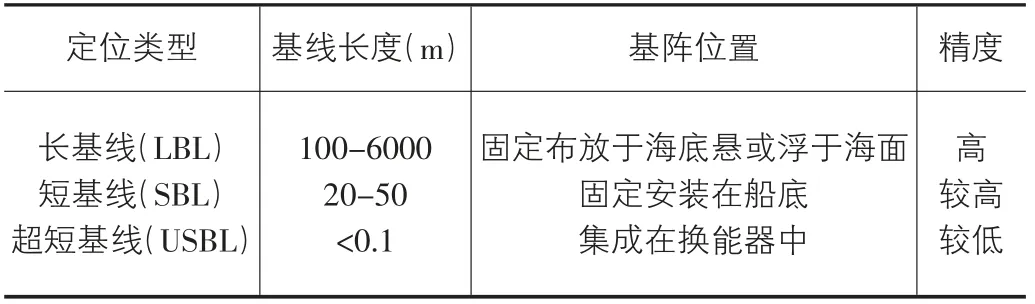
表1 水聲定位技術分類
2.1 長基線定位系統
長基線定位系統主要由兩部分構成,一部分是安裝在水下自主航行器或載體的換能器,另一個部分是布放在海底已知精確地理位置的至少三個聲學應答器組成的聲學基陣。應答器之間的距離構成基線,基線長度根據工作區域及應答作用距離確定,在上百米到幾千米之間。長基線定位系統是通過測量目標與各個聲學應答器之間的斜距,采用球面交匯的方法對目標進行定位。
從定位原理上講,系統導航定位只需要2個海底應答器就可以,但是產生了目標的偏離模糊問題,另外不能測量目標的水深,所以至少需要3個海底應答器才能得到目標的三維坐標[5]。實際應用中,需要接收4個以上海底應答器的信號,產生多余觀測,提高測量的精度。系統的工作方式是距離測量(range/range)。長基線定位精度很高,但系統構成復雜,成本昂貴,且需要大量的時間布放和校準水下聲學應答器基陣,聲學應答器基陣回收程序復雜,且存在丟失的風險。
2.2 短基線定位系統
短基線定位系統定位原理與長基線系統相同。區別在于短基線定位系統的聲基陣通常是由安裝在船底的換能器組成,換能器之間的距離一般在20-50m之間,換能器之間的相互關系精確測定,組成聲基陣坐標系,聲基陣坐標系與船舶坐標系的相互關系由常規測量方法確定。短基線系統的測量方式是由一個換能器發射,所有換能器接收,得到一個斜距觀測值和不同于這個觀測值的多個斜距值,系統根據聲基陣坐標系相對于船舶坐標系的固定關系,輔以外部傳感器觀測值,如GPS、MRU、Gyro提供的船的位置、姿態、船艏向值,計算得到目標的地理坐標。系統的工作方式是距離測量(range/range)。短基線定位系統的定位精度雖然不如長基線,但系統結構較長基線簡單,由于其聲學基陣在船底安裝時已經精確測量校準,更換作業工區不需要重復布放和校準聲學基陣,操作相對簡單。但目標位置的解算也會受到船體姿態的影響,還需要配備高精度外部傳感器獲取船體實時的位置、姿態和航向信息。
2.3 超短基線定位系統
超短基線定位系統由水下聲學測量設備和水上數據處理設備兩大部分組成,其中水下測量設備由安裝在船體的聲學換能器和安裝在水下載體的聲學應答器組成[6]。超短基線定位系統所有的收發器基元按照精確的相對位置關系集成安裝在聲學換能器內部,組成聲基陣坐標系,聲基陣坐標系與船舶的坐標系之間的關系要在安裝時精確測定[7],包括位置偏差、姿態偏差(聲基陣的安裝偏差角度:橫搖和縱搖)和艏向偏差(聲基陣坐標系與船舶的坐標系的水平角度偏差)。系統通過安裝在船上的聲學換能器發射并接收回波信號來確定水下應答器相對于換能器基陣的距離和角度,結合羅經、姿態傳感器提供的實時的船姿態與艏向信息以及水面定位系統提供的船舶地理坐標,就可以實時解算出水下應答器所在位置的地理坐標。超短基線定位精度相較于長基線和短基線來說稍低,但其結構簡單,安裝使用方便,成本較低,對使用載體體積尺寸要求不高,缺點是系統的定位精度受外部姿態校準精度影響較大,安裝后必須在作業工區內進行精確校準。
3 地球物理導航
地球物理導航是利用AUV所處環境特征來確定AUV當前的位置。地球物理導航首先需要建立工作區域的特征地圖數據庫,然后借助合適的傳感器探測、識別和分類環境特征,與地圖數據庫進行特征匹配,獲取匹配點的坐標信息即AUV當前位置。根據物理參數的不同,地球物理導航可以分為光學導航、聲吶導航。
3.1 光學導航
光學導航使用單目或立體相機捕獲海床圖像,然后通過圖像特征匹配以進行導航。
單目相機將光線通過一系列鏡頭或定焦來放大遠處物體的圖像。立體相機在連續圖像對之間具有完整的六個自由度變換。由于水下環境中光照不足,相機成像范圍較小,因此,水下光學導航方法主要適用于環境特征豐富的小范圍區域的導航定位,如船體或沉船檢測等。
3.2 聲吶導航
聲吶導航是利用聲學探測方法,識別和提取海底地形或圖像等物理特征,與存儲在AUV內部特征地圖庫進行匹配,從而獲得AUV的當前位置。聲納可分為成像型(提供海底圖像)或測距型(構建海底三維地形或剖面數據)。表2和表3分別列舉了幾種常用于水下導航的成像聲吶和測距聲吶設備。
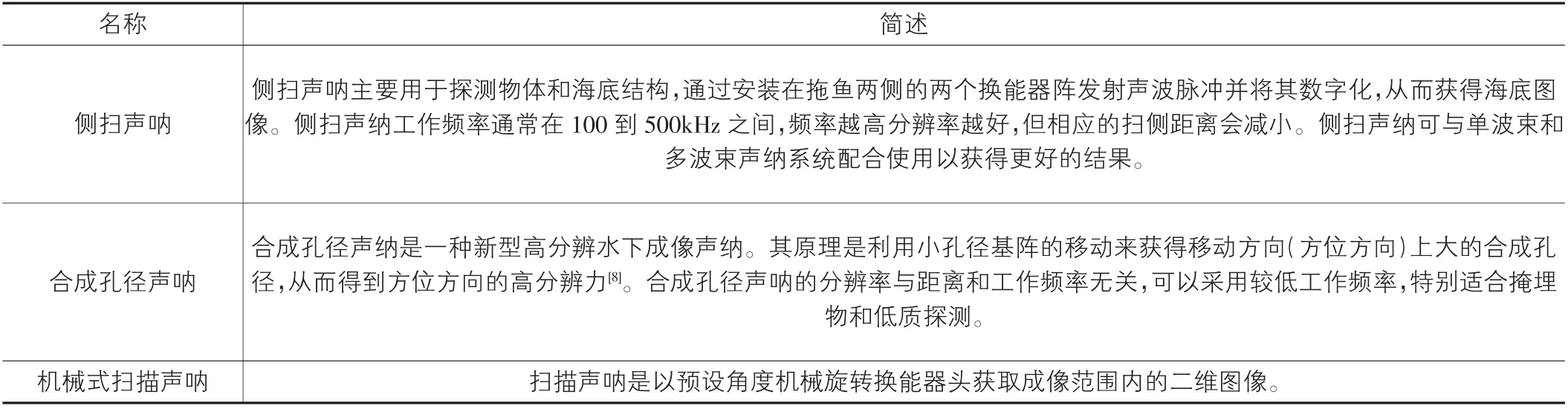
表2 用于水下導航的成像型聲吶

表3 用于水下導航的測距型聲吶
4 總結
文章回顧了當前AUV中應用的不同水下導航定位技術。AUV的導航定位技術有慣性導航系統(INS)、水下聲學定位和地球物理導航。但是,如果AUV上采用上述單一的導航定位方法,其精度、可靠性無法滿足水下任務要求,因此低成本、組合式及具有多用途和能實現全球導航的組合導航系統是AUV導航定位技術的發展方向[9]。除此之外,隨著導航定位技術的發展,不同的位置估算方法如卡爾曼濾波(KF)、擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)、擴展信息濾波(EIF)、粒子濾波(PF)等組合應用可以獲得更為準確的結果。近年來,協同定位和同步定位與地圖構建(SLAM)方法逐漸成為AUV導航定位領域的研究熱點[10],并在實際應用中取得了一定的進展。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45