基于Mirauge3D 軟件的傾斜攝影實景三維建模技術研究
2022-03-09 07:25:04董繼宏
科學技術創新 2022年5期
關鍵詞:模型
董繼宏
(三和數碼測繪地理信息技術有限公司,甘肅 天水 741000)
近年來,隨著相機重量減輕、相機分辨率提高、無人機續航時間增加、定位精度不斷提高等[1-3],無人機攝影測量發展速度迅速提升,無人機攝影測量技術已經與生活息息相關。比如國土調查項目、農經權項目、國土資源普查項目、房屋立面改造項目、農村房地一體登記頒證項目、實景三維中國項目等,都采用了攝影測量技術[4-7],而且攝影方式由垂直攝影變為傾斜攝影,獲取的影像分辨率更高、影像質量更高。然而傾斜攝影一般要求航向、旁向重疊度為80%,航飛高度一般在千米之下,通常搭載5鏡頭獲取影像數據[8-9]。這樣一來,獲取的影像較傳統垂直攝影來說,不但數量增加了很多,而且角度也是非常大的,這為數據解算帶來了挑戰[10]。本文在分析了傾斜攝影的特點后,對參與解算的數據進行了預處理,然后以實際生產項目為例,采用Mirauge3D 軟件進行空三解算和實景三維模型生產。利用檢測點對模型精度進行檢測,結果表明:采用本文的方法,首先對數據進行預處理,然后進行空三解算,不但在一定程度上提升了空三解算的效率,而且空三解算的成功率也有了一定的提升,并且基于該空三生產的模型精度可以達到4.5cm,可以滿足1:500 地形圖生產需求,為大比例尺地形圖生產提供了切實可行的方案。
1 傾斜攝影技術概述
主要從傾斜攝影的概念和原理、建模流程和軟件進行簡單介紹。
1.1 傾斜攝影測量技術
傾斜攝影是指在飛行平臺上掛載多鏡頭相機,從空中對地面進行多角度、全方位、高分辨率影像數據采集。飛行平臺通常是有人機、無人機等,目前主要以無人機為主。多鏡頭相機主要有2 鏡頭搖擺相機、3 鏡頭相機、5 鏡頭相機甚至更多鏡頭,這里以5 鏡頭為例對多鏡頭的組成進行講解。5 鏡頭相機由1 個下視相機和4 個側視相機,通常側視相機與下視相機夾角為45度。航空攝影測量中,相機焦距、飛機飛行的相對航高、相機的像元大小和地面影像分辨率滿足以下關系:
H=f*GSD/a(1)
其中,H 是相對航高,即飛機距離地面的高度,在航線規劃時已經規劃好的,單位為m;f 是相機焦距,在相機選擇后,其焦距基本上是一個定值,單位為mm;GSD 是獲取的影像地面分辨率,該值主要根據項目要求進行設置,單位為m;a 是像元大小,相機選擇后,該值不會再發生改變,單位為mm。通過式(1)可以看出,當相機被選定后,即f 和a 是固定值,地面影像的分辨率GSD 只和相對航高H 有關。在傾斜攝影時,當下視鏡頭完全垂直于地面,記其航高為H下,則側視鏡頭與地面呈45 度夾角。由直角三角形可知,此時側視鏡頭中心到側視影像中心的距離H側為H下的1.4 倍,而航高和地面分辨率在數值上成正相關,這樣一來,H側獲取的影像分辨率在數值上是H下的1.4 倍。當要獲取1.5cm 的下視影像時,如果側視焦距和下視焦距相同,則獲取的影像分辨率是2.1cm,無法滿足需求,因此需要對焦距進行調整。假設下視焦距是35mm,通過式(1)可知,將側視焦距調整至50mm,這樣就可以獲取分辨率一致的影像。
1.2 傾斜攝影建模流程
傾斜攝影建模主要包括外業和內業,外業工作內容有:測區的勘察與資料收集、航線規劃、像控點點位選址與噴涂、像控點測量、無人機航空攝影任務實施、航攝質量檢查、成果整理與提交;內業工作內容有:對外業提交的成果進行整理備份、數據預處理、工程創建與完善、空中三角測量解算、像控點轉刺與平差、實景三維模型生產等,其主要流程如圖1 所示。
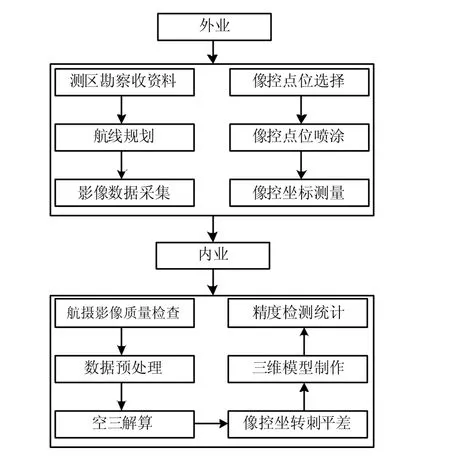
圖1 傾斜攝影建模流程
1.3 傾斜攝影建模軟件
傾斜攝影建模軟件是針對傾斜攝影數據解算而開發的軟件,目前常見的有ContextCapture、Photo Mesh、PhotoScan、瞰景Smart3D、大疆智圖、dp-Smart、Mirauge3D 等。在本文中,將使用Mirauge3D 軟件進行空三解算和實景三維模型的生產。
2 數據預處理
在分析了傾斜攝影的特點后,針對傾斜攝影數據,提出以下幾方面的優化。
2.1 降低參與運算的影像數量
傾斜攝影因為是5 鏡頭,且重疊度高,因此其影像冗余度很大。通過分析可知,當垂直鏡頭能夠覆蓋任務區邊緣時,存在某個鏡頭拍攝的影像在任務區范圍線外,這樣的影像對后期數據建模是無用的,因此這類影像是沒必要使用的。通過分析航向和5 鏡頭之間的相對關系,可以很容易得到任務線范圍外的影像,對這部分影像進行剔除,可以降低影像冗余度,提高數據的解算速度。
2.2 解決POS 與影像不對應的問題
傳統的垂直攝影測量,一張有效影像對應一個有效POS,在傾斜攝影中,增加了側視鏡頭,但并沒增加記錄側視鏡頭的POS 裝置,這樣使得POS 和影像無法一一對應。在傾斜攝影中,記錄的1 組POS 是下視鏡頭的POS。在數據解算的過程中,利用下視POS 來代替側視鏡頭的POS,雖然下視POS 和側視鏡頭的真實POS 相差不大,但是畢竟不準確,對后期數據解算的成功率和精度都有一定的影響。以下視鏡頭POS 和平臺檢校參數可以解算得到側視鏡頭對應的POS 數據。通過利用Matlab語言進行代碼編寫,對POS 數據進行解算,得到側視影像對應的唯一坐標值。
2.3 均衡影像質量
由于5 鏡頭進光角度和進光量不同,所以5 鏡頭影像一般都存在一定的色差,這為后期數據的準確解算帶來了影響。在分析了5 鏡頭影像的特點后,采用PhotoShop 軟件,對每個鏡頭的某一幅地物豐富、對比度高的影像進行參數調整,使其不同波段的值盡量符合正態分布,然后將調整的參數記錄下來。通過創建動作,對其余影像進行自動批處理,從而提升影像的質量,圖2 是處理前的RGB 的色階分布圖,圖3 是處理后的RGB色階分布圖。通過圖2 和圖3 可以看出,在對影像進行一系列參數調整后,其色階圖有了明顯的變化,調整后的色階圖更符合正態分布。

圖2 處理前的RGB 色階分布圖
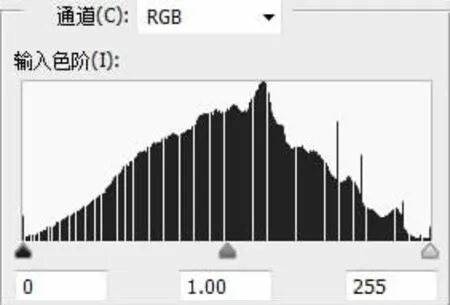
圖3 處理后的色階分布圖
3 實際案例
3.1 測區勘察與資料收集
本次實驗數據來源于河湖確權項目,長約15km,寬約100m,測區地形起伏較大。已有數據為國土三調遙感影像數據,主要用來作為工作底圖。
3.2 像控點布設與采集
由于是帶狀區域,且寬度才100 米,采用對稱式布點,明顯需要布設加密點多,因此在布點時,采用兩側交叉布點的方案。所謂交叉布點,就是指兩側點位的連線與范圍線的長邊夾角基本上呈一個小的銳角或者一個大的鈍角,而不是在90 度左右。按照1km 一個點,交叉共布設32 個像控點,在精度薄弱區域布設10 個檢測點。采用GPS-RTK 進行像控點坐標采集,在采集前,采用紅白油漆進行點位噴涂,如圖4 所示,然后儀器對中整平,當狀態為“固定解”時進行采集,每個點位采集5 次,然后取均值作為最終的測量成果。

圖4 噴涂的像控點點位標志
3.3 航線規劃
使用地面站軟件對航線進行規劃,設置航向重疊度為85%,旁向重疊度為80%,確保在距離地面近地點處獲得的影像能夠滿足航飛重疊度要求。影像地面分辨率最低為5cm,最高為3.5cm,沿著河流走向進行航線敷設。因為河流寬度較窄,所以只規劃了3 條航線,這樣在保證作業效率的前提下,也保證了數據解算的成功率,因為一條或2 條航線在空三解算時,失敗率非常高。
3.4 影像數據獲取
航線規劃好后,將任務上傳給飛行控制中心,飛行控制中心根據上傳的任務進行影像數據采集。在無人機正式起飛前,需要對無人機進行檢查,主要對安裝固定、電池電量和儲存卡是否能夠正常讀寫進行檢查,在確保一切滿足航飛要求后進行升空采集影像。在采集的過程中,時刻通過地面站對航飛狀態進行觀察,確保飛行狀態時刻是受控的。在影像數據獲取后,對影像數據的質量進行快速檢查,確保航飛提交到內業的成果是可正常使用解算的。
3.5 數據預處理
數據預處理主要包括剔除冗余無效影像、解決POS 不對應問題和提升影像質量。在本次作業中,剔除了1452 張影像,剔除率約為15%。利用Matlab 編寫開發小程序,對POS 不對應問題進行處理。以下視鏡頭為標準,結合相機檢校平臺,對側視鏡頭POS 進行解算,解算后所有影像都有唯一的POS 與之對應。利用PhotoShop 軟件對影像進行統一調色,提升影像整體質量。
3.6 空三解算
為了驗證本文的預處理環節對后續的空三解算有效,在本次數據解算環節,用預處理前后的數據進行空三解算,結果如下:3.6.1 利用Mirauge3D 軟件對預處理前的數據進行空三解算,解算耗時14h,通過人機交互方式對空三成果進行查看,空三呈現彎曲狀態,解算報告中加密點重投影中誤差為0.61pixel,雖然沒有超限,但是空三彎曲,理論上來說,成果是不可用的。當然,這種情況有時可通過控制點進行平差糾正。3.6.2 利用Mirauge3D 軟件對預處理后的數據進行空三解算,解算耗時11.3h,通過人機交互方式查看空三成果,空三成果基本上符合實際地形,且POS 基本上在一個平面上,符合航攝狀態,空三成果可用。查看空三解算報告可知,其加密點重投影中誤差為0.48pixel,精度滿足相關規范要求,且比處理前的空三精度略高。
3.7 像控點轉刺平差
對上述兩個空三成果均進行像控點和檢測點的轉刺,轉刺原則按照能看見的,不被遮擋的均進行轉刺,然后進行平差,平差結果如下:3.7.1 預處理前的空三通過平差后,其狀態由曲變平,空三成果可用,平差耗時1.2h,平差后的像控點精度為0.021m,檢測點精度為0.045m,成果均滿足規范要求。3.7.2 預處理后的空三平差完成后,其耗時0.7h,平差后的像控點精度為0.013m,檢測點精度為0.027m,成果均滿足規范要求。較3.7.1的結果,其空三精度高,轉刺像控點、檢查點、平差均耗時短,所以表明預處理提升了空三的平差效率和空三成果精度。
3.8 三維模型制作
基于3.7 中平差后的空三成果進行模型生產,結合電腦配置,設置相同的框架坐標系統、瓦片大小和原點坐標,導入同一任務區范圍線進行模型生產。通過對建模時間進行統計,②較①建模耗時減少了10%,對于小面積來說,相差不大,但是對于大面積數據建模,這個比例是非常可觀的。通過人機交互的方式對模型進行查看,特別是范圍線邊緣的模型。從模型精細度、結構、紋理等方面進行查看,兩個空三生產的模型基本上相同,表明剔除影像并沒有對建模效果帶來影響。
4 精度統計與分析
采用10 個檢測點對兩組最終的模型成果精度進行人機交互式檢測,檢測結果如表1。

表1 檢測點精度檢測統計表單位:cm
采用平均值來代替中誤差,對表1 結果進行計算,①的模型中誤差為5.3cm,②的模型中誤差為4.5cm,兩組模型精度均能夠滿足1:500 地形圖精度需求,但是整體來說,②的精度更高,成果更可靠,也表明通過預處理,提升了后期模型的精度。
5 模型存在的問題及解決方案
本次生產數據主要是河流,因此存在一個主要的問題是模型水域存在空洞,紋理未映射上,如圖5 所示。

圖5 模型水域部分成果圖
通過圖5 可以看出,模型破損主要位于水域部分,這是因為水域屬于特征不明顯區域,也就是通常說的弱紋理區域。因為水面非常相似,即使提出少量的特征點,在后期平差糾正的時候,也會因為相似度極高,而被作為錯誤點進行剔除,使得水域部分加密點極少,甚至沒有加密點。
針對上述問題,提出以下兩種修補水面的方案:
5.1 利用范圍線進行約束建模
首先生產得到水域模型,然后在測圖軟件中,采集得到水域的邊界線和高程,然后通過格式轉換,轉換為建模軟件認可的kml 文件,最后將該文件導入建模軟件中,對水域部分進行約束建模。
5.2 借助修模軟件進行修模
利用武漢天際航的DP 或智覺空間的SVS 進行水域部分模型的修補。首先刪除水域邊界線內破損的模型,然后對空洞進行填充。通過空三成果,對水域部分的紋理進行自動映射,當映射效果不能滿足要求時,采集需要修改的區域,聯動PS 軟件進行紋理貼圖的修飾,最后重新映射至模型上,這樣就可以得到符合要求的水域模型了。
結束語
本文首先結合傾斜攝影的特點,對影像進行了一系列的預處理,然后采用對比分析的方法,對預處理前后的數據分別進行空三解算和模型生產,結果表明:通過預處理,數據解算效率、空三解算通過率和成果精度均有了一定的提升,且模型質量并沒有降低。對于空三解算效率低、空三通過率低、建模效率低等問題均有一定的指導和借鑒意義,可以為同行作業人員提供有效參考,提升傾斜數據解算質量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19