無人機傾斜攝影測量技術在房地一體項目中的應用研究
2022-03-09 01:50:34張顯升
科學技術創新 2022年4期
張顯升
(三和數碼測繪地理信息技術有限公司,甘肅 天水 741000)
近年來,無人機發展迅速,尤其是低空、長時間續航的無人機發展成為了主流。傳統的無人機上掛載垂直相機,就可以進行測繪產品的生產,其核心使用的是共線方程。通過恢復攝影時地面和相機之間的關系,結合飛機在空中的位置和姿態,就可以獲取地面相對精度較高的地面點[1-2]。這種方式主要用來生產空三加密成果、數字正射影像圖和大比例尺地形圖成果。在生產1:500 地形圖時,其精度很難達到項目要求,因此需要尋求另外的方式生產精度要求更高的地形圖成果。隨著相機質量減輕、集成技術不斷提升,將單相機換成多相機,從多個角度獲取影像,用于數據的生產成為了研究熱點[3-4]。通過測試,這種方法生產的1:500 地籍圖精度很高,完全滿足項目精度要求。隨著房地一體項目的開展,由于其精度要求高且工期緊、費用低,采用傳統全野外作業方式,不但不可能按時完成項目,而且需要支出的費用更高,全部是外業作業,風險性也高,因此將多鏡頭獲取數據的方式用于房地一體項目中來,成為了研究熱點[5-7]。通過無人機搭載傾斜相機,獲取多角度影像,用于三維模型生產,然后在三維模型上直接裸眼采集房屋、宗地等,通過精度檢測,成果精度不一。本文主要是針對這種成果精度不一進行分析,然后對影響因素進行優化處理,給出切實可行的方案,然后以實際項目進行精度驗證。結果表明:采用本文的方法,生產的成果精度均衡,且滿足地籍精度要求,可以作為地籍圖生產的一種優化方案,具有較強的實用性。
1 傾斜攝影測量技術介紹
主要從傾斜攝影原理、傾斜攝影建模軟件和傾斜攝影流程進行介紹。
1.1 無人機傾斜攝影原理
“傾斜”一詞是相對“垂直”來說的,其主要區別在于獲取地面影像角度的不同。傾斜攝影測量是指在作業平臺上,掛載傾斜攝影儀,對地面進行影像數據獲取,然后用來建模,生產測繪產品的技術。作業平臺主要有有人機、無人機等,考慮到成本和作業區實際情況,多數作業采用的均為無人機[8-9]。掛載傾斜攝影儀主要分為量測和非量測的,考慮到相機的成本,通常采用的是非量測小像幅相機。通過從空中獲取地面多角度、全方位影像,然后結合相機曝光時的空中位置和姿態,通過共線方程和影像匹配技術,得到地面相對坐標系下的特征點,通過密集匹配技術,得到密集的三維坐標點,還原地形真實狀態[10-11]。通過控制點的引入和轉刺,將相對坐標成果糾正到控制點坐標系下,得到最終的高精度三維成果。5 鏡頭獲取地面影像示意圖見圖1。

圖1 無人機傾斜攝影示意圖
1.2 無人機建模軟件介紹
建模軟件分為傳統的手工建模軟件,如3dsmax等;基于傾斜空三成果的建模軟件,如dp-modeler 和SVS-modeler 等。本文主要研究的是傾斜攝影自動化建模軟件,目前常用的有瞰景科技的Smart3D2021、大疆的大疆智圖、本特利的Context Capture(簡稱CC)和photoscan 等。傾斜攝影建模軟件具有自動化程度高、集群作業效率高等特點,但是不同軟件精度不一,適用的場景也不一樣。結合房地一體項目和軟件的特點,照片數基本上都在1w張左右,建模選用CC軟件,該軟件精度較高,且處理1W張影像效率高、空三精度高。
1.3 無人機傾斜攝影建模流程
從作業場區來說,無人機傾斜攝影建模主要分為外場和內場。外場主要包括航攝前的測區勘探、空域申請、航線規劃、控制點測量和影像數據獲取;內場主要包括外場成果整理、工程創建、數據空三解算、控制點轉刺、平差調整、自動化建模、地籍圖采集與編輯等,具體作業流程見圖2。
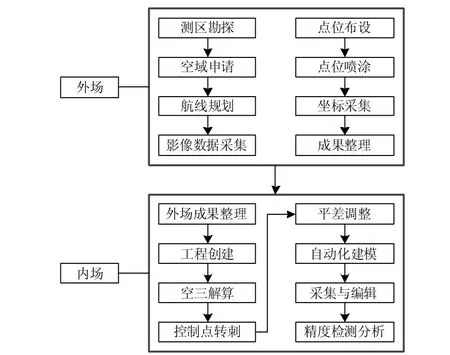
圖2 無人機傾斜攝影建模流程
2 傾斜攝影建模精度影響因素分析
2.1 控制點靶標和精度方面
傳統的靶標,是在地面上隨機選取特征點,然后采集坐標時,手扶對中桿進行對中,目測差不多時進行坐標采集。這種方式獲取的坐標點成果,其精度損失有兩方面:一是采集坐標時,其精度較低;二是在內業進行控制點轉刺時,由于無法準確判斷外業采集的點位,導致刺點精度較低。
由于特征點會導致內業轉刺精度損失,因此需要對點位靶標進行改正。可采用油漆噴涂式靶標,這樣點位明確,有利于內業準確刺點。對于外業采集點位精度低的問題,可采用靜態的方式進行點位坐標的采集。傳統的特征點和油漆噴涂的靶標見圖3。

圖3 外業控制點示意圖
2.2 建模軟件選取
影像成果的質量由外業來決定,影像數據解算主要由內業軟件來完成。不同軟件,其空三解算算法和精度是不一樣的,在分析了各軟件的優勢后,選擇CC 軟件來進行數據解算,不但精度高,且空三解算質量高,可以有效保證后續成果的精度。
2.3 航攝方式方面
主要是指外業獲取數據的方式,目前影像數據獲取的方式有固定航高飛行、變高飛行以及仿地飛行。對于地勢平坦地區,可以采用固定航高飛行;對于地勢變化有規律的地形,可以采用變高飛行;對于地勢起伏變化無規律的,可以采用仿地飛行。其中前兩者無需高精度的DSM數據,仿地飛行需要高精度的DSM數據。一般都是采用垂直攝影方式獲取影像后,進行數據解算,得到DSM成果,然后利用該成果進行仿地航線規劃,然后進行仿地航攝。該方法獲取的影像分辨率均勻,成果解算精度高。
2.4 模型質量和完整性
模型質量、精度和完整性,直接影響測圖成果的精度。雖然傾斜攝影已經獲取了多角度的影像,但是由于遮擋關系,部分區域還是盲區,未采集到有效影像。在數據解算和建模的過程中,這塊盲區解算精度不高,建出的模型存在拉花變形等嚴重問題,會對測圖精度帶來影響。
這種情況下,可以利用立體像對進行補充采集,對于立體像對無法采集的部分,可采用人工外業補充采集的方法進行,這樣可以提高地籍圖成果的精度。
2.5 作業人員方面
裸眼測圖是近年來興起的一種測圖方式,較傳統虛擬立體測圖,其具有所見即所得的特點,使得測圖更有利于推廣,生手可以在短時間內學會測圖,這使得測圖精度沒有了保障。房地一體項目工期緊、任務量大,很多單位擬都大量招聘實習生進行數據生產。由于沒有測圖經驗,在短時間內所學知識,無法對地物進行準確定位和采集,使得所采集的成果精度不均勻。這種情況下,需要提高作業人員的水平,才可以有效保障測圖成果的精度。
3 項目案例
采用本文提到的精度優化解決方案,對實際生產項目精度進行驗證分析。本次任務區有效面積約2.87km2,測區內地勢起伏變化無規律。房屋分散不均衡,部分區域樹木遮擋嚴重、建筑密集。
3.1 航線規劃
本次航線規劃均采用WapPointMaster 軟件完成。首先利用其規劃地面分辨率5cm的航線,掛載單鏡頭進行影像采集。在獲得高精度的DSM數據后,利用其規劃仿地飛行航線,地面分辨率1.5cm,然后進行仿地飛行影像數據獲取,共飛行3 架次,獲得有效影像數約3 萬張。航線規劃設置參數如圖4 所示。

圖4 航線規劃參數設置
3.2 控制點測量
為了提高像控點的精度和內業轉刺的精度,本次作業過程中,所有控制點均采用油漆噴涂的方式。利用油漆噴涂L形點位,然后采用靜態的方式進行坐標點的測量。在噴涂靶標時,順帶對其點號進行噴涂,拍攝實地照片,便于內業進行精準點位轉刺。在控制點采集完成后,隨機均勻采集15 個檢測點,該成果主要用來檢查空三、模型成果,最終檢查得到的地籍圖成果。
3.3 影像數據采集
在點位噴涂好后,進行無人機航空攝影影像數據獲取。在航飛前,首先對無人機進行例行檢查,主要檢查其各部件是否固定牢靠、相機是否正常曝光,內存卡是否可以正常對影像數據進行保存、電池電量是否可以保證完成一架次任務。在檢查確保無誤后,進行無人機影像數據的采集。在采集過程中,需要對無人機航飛情況進行觀察,確保無人機飛行是受控的,避免發生無人機失控帶來的其他意外事件發生。
3.4 數據質檢和整理
在獲得影像數據、POS數據和控制點成果后,對該成果進行質檢。影像數據主要查其紋理是否清晰、對比度是否符合要求、是否存在虛化的現象;POS 數據主要查其是否完整;控制點成果主要檢查其坐標采集是否準確,實地照片是否可以反映實際點位情況。通過檢查,影像數據、POS數據和控制點成果質量符合要求,可以用于后續數據的生產。
3.5 空三加密及控制點轉刺平差
在新建工程,導入影像和POS數據,完善相機參數后,就進行空三任務的提交。在提交空三任務時,參數使用軟件默認的設置即可,通過多臺電腦集群作業,完成空三自由網的解算與平差。通過人機交互方式查看加密成果,未發現明顯的分層、彎曲現象。查看空三報告,加密點精度良好,重投影中誤差為0.51pixel。空三解算后丟片很少,且多為邊緣影像,對后續模型生產影響不大,空三成果可以直接使用。
設置控制點坐標系,導入控制點進行控制點的轉刺。在轉刺過程中,對于模糊、邊緣點位未進行轉刺,其余點位均進行轉刺,轉刺完成后進行平差。平差完成后,查看平差報告,控制點精度良好,可以滿足項目生產要求。
3.6 三維模型生產
結合電腦的配置,本次設置瓦片大小為100m,平面簡化設置為“0”,單位選擇米,這樣可以盡可能保留下建筑物的棱角結構。后期需要進行地籍圖的采集,模型輸出格式選擇OSGB,在模型輸出完成后,再次輸出正射影像圖。模型用來裸眼采集地籍圖,正射影像圖主要用來套合采集的地籍圖,檢查采集的是否準確。測區部分實景三維模型如圖5 所示。

圖5 測區部分實景三維模型
3.7 地籍圖采集與編輯
本次采集選擇清華山維EPS 軟件,該軟件上手容易,操作簡單。首先將模型和xml 文件進行轉換,得到EPS軟件能夠識別的DSM數據,然后導入DSM數據,在裸眼環境下,直接進行地籍圖的采集。該軟件有五點房功能,可以快速采集規則的四邊房屋,大大提升了采集效率。對于模型變形嚴重區域,無法直接在模型上準確采集地籍圖,可通過調入立體像對,在虛擬立體環境下補充采集地籍圖。對于這兩種方法無法采集的,需要在外業進行補充采集。測區部分地籍圖成果如下圖6 所示。

圖6 測區部分地籍圖成果
3.8 精度檢測與分析
利用15 個檢測點對地籍圖點位精度進行檢測[12],檢測結果見表1。
通過表1 可知,15 個檢測點中,殘差最大為5.7cm,最小為2.8cm,其平均值為4.0cm,成果精度可以滿足地籍規范要求[13]。
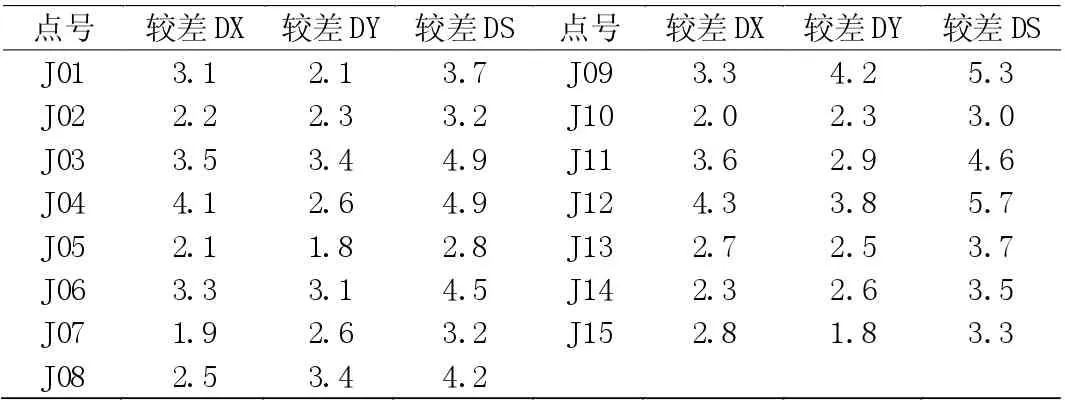
表1 地籍圖精度檢測統計表單位:cm
4 結論
傾斜攝影技術用于房地一體項目的技術已經被廣泛使用,但是生產的地籍圖成果精度參差不齊,成果精度不均衡。為了保證生產的成果滿足項目要求,本文在分析了目前的作業方式的基礎上,對其中影響成果精度的因素進行了分析,提出切實可行的解決辦法。并通過實際項目進行生產驗證,結果表明:按照本文的方式生產的成果精度高且均衡,可以滿足房地一體項目要求,可以為房地一體項目生產帶來借鑒。
