傾斜攝影測量技術在大比例尺地形圖測繪中的應用研究
2022-03-09 01:50:42周金寶
科學技術創新 2022年4期
周金寶
(三和數碼測繪地理信息技術有限公司,甘肅 天水 741000)
1 概述
近些年來,傾斜攝影測量技術在測繪領域得到了迅速發展,它改變了獲取航攝影像角度的單一性,通過將多臺傳感器搭載在同一飛行平臺上,同時從多個不同角度采集多角度、全方位影像,獲取信息更加豐富、盲區更加少的航攝影像數據[1-4]。在傾斜攝影數據解算中,多視影像的密集匹配是一項至關重要的內容,它可以匹配出密集的高精度數字表面模型成果,從而對地面的起伏變化和地物的結構進行精準表達,已經成為了新一代空間數據基礎設施的重要內容[5-6]。以無人機傾斜攝影技術獲取的航攝像片為原始數據,通過軟件自動化或半自動化解算,得到可以準確表達實際地物狀態的過程,稱為“傾斜攝影建模”,通過解算得到的三維模型,稱為“傾斜攝影模型”,這種模型是對真實場景的準確還原,所以采用傾斜攝影方式得到的三維模型被稱為真三維模型[7-9]。
傳統測繪地形圖主要工作量在外業,內業工作內容基本上很少,而外業作業這種方式,具有出圖時間長、作業效率低、風險高、成本高、作業員勞動強度大等缺點。目前衛星影像分辨率最高可以達到0.31 米,采用衛星影像進行地形圖測繪,其受影像分辨率、影像數據獲取、地貌條件等的限制,仍然無法滿足大比例尺地形圖測繪的成圖要求。采用傳統航空攝影測量方式進行地形圖測繪,由于其飛行高度高,因此受到空域、天氣等因素的影響,且該作業方式生產地形圖成本高、對作業單位的實力要求高,無法進行大規模多比例尺地形圖的測繪。無人機傾斜攝影測圖是基于無人機傾斜攝影建模技術應運而生的,通過無人機獲取高分辨率、多角度的影像,基于嚴密的光束法約束平差和密集點云匹配,生產得到高精度的三維模型成果,然后直接采用裸眼的方式進行大比例尺地形圖的生產。這種方式較傳統垂直攝影方式地形圖來說,其獲取的影像角度更全,可以減少更多的外業工作量,由于其分辨率高,可以在內業完成電力線走向的判定[10]。
2 傾斜攝影測量原理
傾斜攝影測量是指在飛行平臺上掛載傾斜航攝儀從空中對地面獲取影像,然后通過一系列內業數據處理,得到實景三維模型,然后基于模型進行測繪的一門技術。飛行平臺通常有有人機和無人機,無人機主要有固定翼和旋翼機;傾斜航攝儀主要有搖擺2 鏡頭、3 鏡頭、固定5 鏡頭和掃擺9 鏡頭,其中固定5 鏡頭使用最多。固定5 鏡頭相機,其中有1 個垂直于地面,稱為下視鏡頭,其余4 個與地面呈一定的夾角,稱為側視鏡頭。
3 傾斜攝影測量工作流程
基于無人機進行三維模型生產的流程主要包括:接收任務、作業準備、測區勘查、空域申請、航線規劃、控制測量、影像數據航攝、數據解算、控制點轉刺平差、實景三維模型制作、生產地形圖等,詳細流程如圖1 所示。
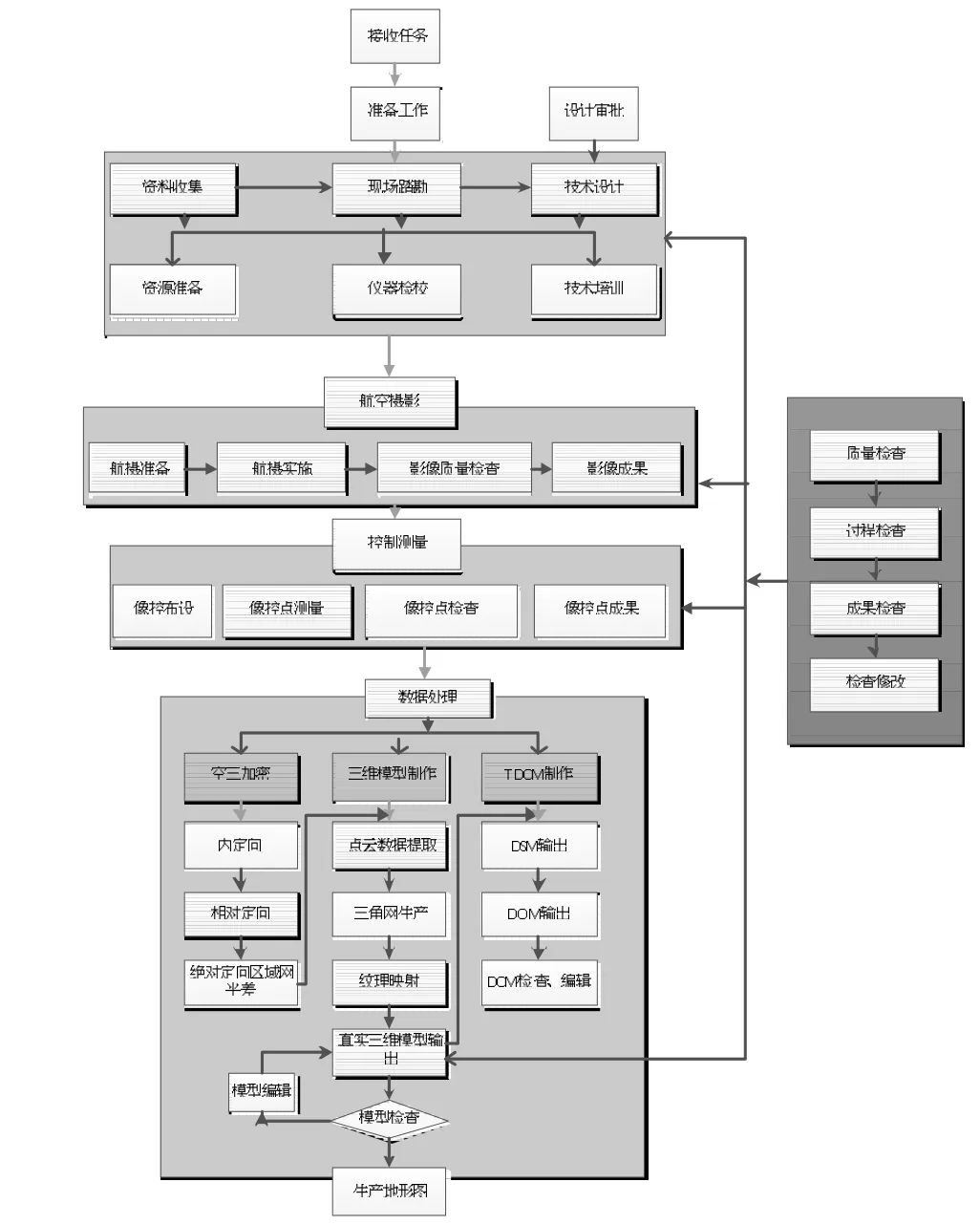
圖1 傾斜攝影生產地形圖流程圖
3.1 像控點布設及測量
3.1.1 像控點以三角網形式分布,點位分布均勻,組網點的水平距離根據成果精度要求選擇,航攝邊緣及航帶拐角處必須布點。
3.1.2 像控點采用布航標的形式,標志采用在硬化地面上用油漆噴繪三角符號,對于田地中的點,則在地面固定木板,在木板上噴繪相同大小的標志。
3.1.3 像控點標志的噴繪必須在航拍前完成,且與航拍的時間間隔不能太長,必須保證在航拍時標志要保存完好。
3.1.4 標志必須涂在四周平坦的地面上,且四周不能有高大的建筑物,如樹,房屋等。
3.1.5 布設結束后拍2-3 張照片,用于說明布設的標志的位置,照片以布設的點號命名。
3.1.6 像控點測量結束后需提交噴繪標志的位置照片,像控點成果坐標,像控點測量的手簿原始數據。
3.2 無人機傾斜航攝
利用多旋翼、固定翼搭載高分辨率的多鏡頭傾斜相機,對測區進行傾斜攝影航攝,得到高分辨率的影像數據。
3.2.1 分區要求:每個航攝區域(一個架次)內的地形起伏固定翼的不能大于1/6 航高,否則必須分區航攝。
3.2.2 分辨率選擇:分辨率必須優于1/3Δm,Δm為地形圖精度中誤差。
3.2.3 航攝時空氣能見度必須高、不能有霧,房屋影子不能過大。
3.2.4 像片的旁向重疊度一般為75%-80%,航向重疊度一般為80%-85%。
3.2.5 航攝時實際航線的范圍要比測區范圍四周外擴1 個相對航高的距離。
3.2.6 固定翼航攝時,差分系統的基站要盡量架設在測區中間,基站運行時間不能少于2 小時。
3.3 三維模型生產
在Context Capture Center Master 軟件(以下簡稱CC)下,利用傾斜航攝成果影像進行空三加密,點云數據提取,三角網模型的生產,紋理信息生產,真實三維模型(OSGB格式)及真正射影像的生產。
3.4 地形圖生產
以傾斜攝影的實景三維模型為基礎數據,在EPS等三維測圖軟件中直接提取地形圖的各要素坐標并繪制地形圖。
3.5 精度檢測
主要采用全站儀、GPS-RTK 對房角、道路拐角、井蓋、墻角、溝渠、噴涂靶標等明顯地物特征點進行三維坐標數據的采集,然后在模型上量取相同點位坐標,統計三維模型的精度。
4 項目試驗
為了驗證本文方案的可行性,特選取1:500 地形圖測量的項目作為試驗。測區位于甘肅省天水市秦州區太京鎮川口村,屬于農村房屋密集區,建筑物基本為1-2 層的磚房或土房,其中磚、土房的比例約為3:2;地形為平地,植被覆蓋度少。任務于2017 年7 月26 日開展,先后完成了無人機航拍、三維模型生產、DLG生產及三維模型、DLG的精度檢測。
4.1 像控點布設
本次試驗共布設26 個像控點,點位分布均勻,均在航攝前完成了布點及坐標測量,標志保存完整。
4.2 傾斜攝影航攝
本次實驗選用四旋翼無人機進行,其主要包括地面監控站、四旋翼型無人機飛行平臺、遙控設備和三鏡頭擺動式傾斜相機。航線規劃時共規劃了2 個架次,設計的相對航高為100米,航向、旁向重疊度均按照80%設置,共獲得有效影像數1026張,即每個鏡頭獲得影像數為342 張。
4.3 內業數據處理
航攝結束后,外業作業就完成了,接下來就需要進行內業數據的解算了,主要包括數據預處理、空三加密、像控點轉刺及平差、實景三維模型生產和地形圖采集。
4.3.1 數據預處理。通過人機交互的方式,查看影像和POS的完整性,檢查是否存在漏拍、是否存在航攝絕對漏洞和相對漏洞、查看影像是否清晰,有無大范圍的模糊遮擋現象。并將所獲得的POS數據,利用ArcGIS軟件自帶的參數進行坐標系的轉換,由WGS8 4 坐標系轉換成CGCS2000 坐標系下對應的投影坐標系。
4.3.2 空中三測量。利用CC 軟件進行連接點自動匹配,對匹配的粗差點進行剔除,然后轉刺像控點并進行平差調整,得到符合規范要求的空三加密成果,其流程如下:a.新建工程。建立工程,主要是加載pos 數據、影像數據和完善相機參數,加載影像方式主要有:通過新建塊,然后導入影像或選中影像文件夾進行導入;通過XML交換文件導入;通過導入塊的方式導入,塊中記錄了影像所在位置,對應的POS數據和相機參數。導入POS可通過txt 導入,也可通過導入塊導入,還有就是利用xml 交換文件導入。b.刺控制點。通過excle 在導入塊時批量導入,也可以設置坐標系,然后手動導入,再進行刺點。首先選中需要轉刺的控制點,雙擊就可以得到點位所在的影像,這種是通過POS數據解算,然后通過位置預測的影像。在影像上找到控制點對應的位置,利用鼠標左鍵和Shift 鍵的組合,完成點位的轉刺。按照同樣的方法,完成剩余控制點的轉刺。c.空三加密。在空三加密之前,通過建立的塊下面的屬性,查看導入影像的一些信息,合適后提交空三任務,進行空三加密。d.提交重建任務。點擊新建重建任務后,可以設置一些參數,點擊空間框架后,設置模型輸出范圍,通過錄入四角坐標或者導入kml 格式的建模范圍進行建模。設置坐標系統,由于生成的模型可以投影到任意坐標系統,所以這里默認利用WGS84 坐標系統就可以,其余參數默認即可。由于傾斜影像數據量大,整個模型輸出對電腦要求非常高,因此需要進行瓦片劃分。本次模型輸出分塊選擇水平劃分,然后設置瓦片大小為100 米,約占內存為9g,集群電腦內存最小為16g,可以保證模型的順利輸出。
4.3.3 三維模型生產。在重建中的General 界面下,點擊提交新的重建任務,在彈出的界面中,設置相應參數:a.設置輸出名稱(Name):設置輸出成果的名稱,也可以默認;b. 輸出成果(purpose):用來選擇輸出成果形式,本次是建模,所以選擇3D Mesh;c.在格式選項下,選擇OSGB格式的模型,其他選型默認;d.后續選項保持默認,點擊提交,然后打開引擎,則開始建模任務的運算。e.最終得到真實的三維模型及真正射影像。
4.3.4 地形圖采集。在EPS軟件中,加載生產的OSGB格式的三維模型,然后采集各個地形要素,并繪制出1:500 地形圖,流程如圖2 所示。

圖2 EPS 軟件操作流程圖
4.4 精度分析
利用GPS-RTK均勻隨機采集道路拐角點、房角點、墻角等特征點的三維坐標,通過和模型上的對比,對本文方案的可行性和精度進行評估。將采集的特征點坐標值導入EPS軟件中,這里需要注意的是,EPS是測量坐標,因此需要對X和Y順序進行調整。然后利用EPS中精度檢測功能,設置中誤差和最大誤差的允許值,然后對所有的檢測點精度進行檢測。這是對點位精度的檢測,還需對距離精度進行檢測,通過外業拉尺采集邊長距離,用于邊長誤差精度的統計。
4.4.1 相對誤差。外業共實測邊長138 條,其中16 條邊因內業無法準確采集而進行了剔除。邊長較差統計結果見表1。

表1 邊長較差統計表單位:米
4.4.2 絕對精度。a.利用外業布設的像控點檢測。共布設26個像控點,參與三維建模10 個,16 個作為檢測點,其中2 個檢測點在圖上無法采集,在統計平面精度時被剔除,1 個檢測點高程測量有錯誤在統計高程精度時被剔除。統計結果見表2-3。b.利用GPS、全站儀測量的地面特征點檢測。外業使用RTK實測特征點及房角點166 個,其中有9 個點,由于三維模型不完整內業無法采集被剔除,34 個點屬于測區外的模型檢測點;使用全站儀實測特征點及房角點146 個,其中31 個檢測點,由于模型邊緣模糊內業無法采集被剔除。具體統計結果見表4-5。

表2 平面精度檢測表單位:米

表3 高程精度檢測表單位:米

表4 平面精度檢測表單位:米

表5 高程精度檢測表單位:米
通過計算有效檢測點,其平面點位中誤差為±0.088,高程點位中誤差為±0.075 米。按照1:500 比例尺來算,《工程測量規范》(GB 50026-2007 )中允許的點位中誤差的限差為0.15m ,高程中誤差限差為0.16m,本次測試其精度符合規范要求。
5 結論
a.通過上述統計,三維模型的平面坐標中誤差為0.088 米,高程中誤差0.075 米。b.利用傾斜攝影的三維模型采集的DLG可滿足1:500 的地形圖精度要求。c.此實驗中,95%的房屋等地物要素可準確采集,5%房屋等地物要素可以采集出來但精度不能足籍1:500 地形圖要求。d.利用傾斜攝影技術生產地籍圖比傳統解析法減少了大量的外業工作,對內業數據的處理能力有了更高的要求,生產效率有一定的提高。e.農村土圍墻、門頂、院落中密集房屋的三維模型效果普遍較差,采集的DLG 成果精度較低,在實際作業中要多注意細節。
6 結論
本文以傾斜攝影成果為原始數據,通過Smart3D 軟件進行了空中三角測量,生成了真實三維模型,并基于模型,采用EPS軟件生產了1:500 地形圖。并利用檢測點對生產的地形圖成果精度進行檢測,結果表明:本文的方案生產的大比例尺地形圖,精度可以滿足GB 50026-2007 相關規定要求。通過測試,本文的方法可以減少外業工作強度,為大比例尺地形圖測繪提供了新的作業方法,希望可以為同行帶來參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
