一種局部幾何關鍵點的激光點云配準方法
2022-03-11 13:07:23于振
河南科技 2022年1期

摘 要:在對激光點云配準時,原始點云的高密度和大數據量都會造成點云粗配準具有很高的時間代價和不穩定的配準精度。點云精配準是以粗配得到的配準參數作為輸入,通常采用標準的ICP算法尋找對應點并迭代計算最佳的配準參數。為了提升激光點云配準的精度和穩健性,提出利用3D DoG算子在點云中提取具備曲率不變性的關鍵點,然后將關鍵點云輸入4PCS算法中對點云做粗配準,最后采用標準ICP算法執行精配準。在采用上述方法對三組激光點云數據做配準試驗后,驗證了該方法的有效性。
關鍵詞:點云配準;3D-DoG;4PCS;局部幾何關鍵點
中圖分類號:TP391 ? ? 文獻標志碼:A ? ? 文章編號:1003-5168(2022)1-0025-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.01.005
A Laser Point Cloud Registration Based on Local Geometric Key Points
YU Zhen
(Shandong Huayu Institute of Technology, Dezhou 253000,China)
Abstract:The laser point cloud has high density and large amount of data, which will cause the point cloud coarse registration to have a high time cost and unstable registration accuracy. Point cloud fine registration takes the transformation parameters obtained from the coarse registration as the initial value, and usually uses the standard ICP algorithm to find the corresponding points and iteratively optimize the transformation parameters. For improve the accuracy and robustness of the laser point cloud registration, this paper proposes to use the 3D DoG operator to extract the key points with curvature invariance, and then input the key point cloud into 4PCS algorithm performs coarse registration, and finally uses the standard ICP algorithm to perform fine registration. After using the method in this paper to do registration experiments on three datasets, the effectiveness of the method is verified.
Keywords:point cloud registration; 3D-DoG; 4PCS; local geometric key points
0 引言
對三維點云進行配準是點云數據應用的基礎性處理之一。三維點云的獲取和應用存在多個方面,如利用三維激光掃描儀獲取的三維點云數據可用于城市擴張監測[1]、森林結構評估[2]、地質災害調查[3]、文化遺產保護[4]、高壓輸電線巡檢[5]、高精度地圖構建等[6]。在計算機視覺領域,利用三角測量方法獲取的密集三維點云可用于目標場景的表面三維重建[7]。受掃描儀測量范圍的限制,需要將多測站的點云做配準才能得到整個場景的三維點云。點云配準的實質是計算點云之間的相對位置參數,然后將點云轉換到統一的坐標系下。
當對三維點云進行配準時,首要任務是在兩片點云間探測對應點[8],對應點的準確性會嚴重影響配準參數的計算精度。目前,在待配準點云和目標點云間探測對應點對的方法主要分為三類,分別是基于距離準則、基于特征準則和采用深度學習的方法[9]。
在點云數據獲取時制約對應點探測精度的主要因素如下:①激光點云具有很高的密度。點云的密度較高會導致對應點探測和配準的時間代價很高,也會增加對應點的模糊性;②場景中移動物體的點云會造成點云在局部不具備剛體性質,即使是正確的對應點,也會因局部的“變形”影響全局參數的計算精度;③場景中的許多重復的結構(如立面和窗戶)會增加對應點匹配的模糊性。
目前,根據對應點對估計點云配準參數的數學理論已經非常成熟。存在的難點是從不同場景的高密度三維點云中準確探測對應點。為此,筆者提出利用3D Difference of Gaussian(DoG)算子在待配準點云和目標點云之間提取具備局部幾何特征的關鍵點,然后利用4-Points Congruent Sets(4PCS)算法對點云做粗配準,最后將粗配準的變換參數輸入到標準Iterative Closest Point(ICP)算法中執行激光點云的精配準。
1 方法研究
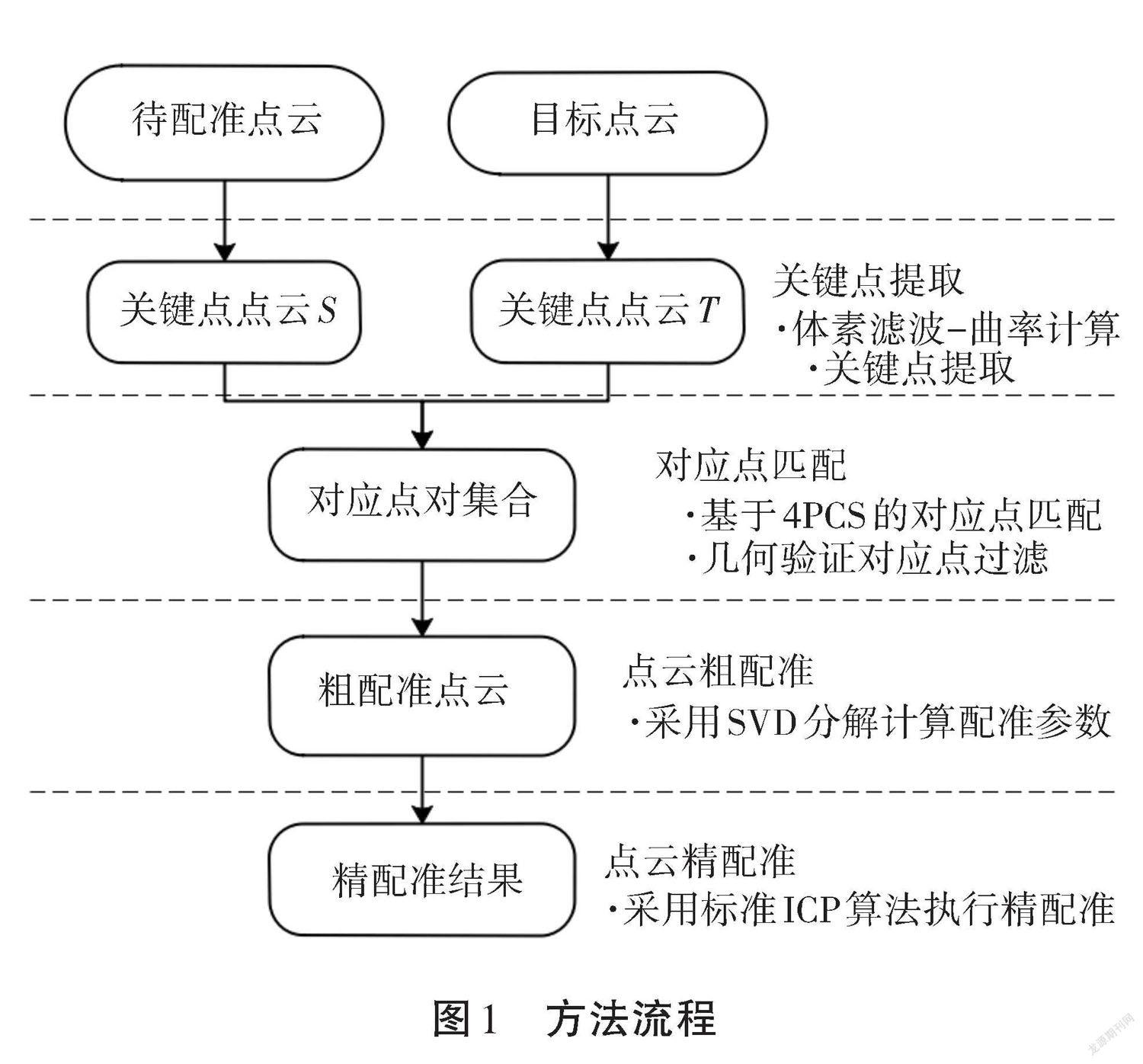
筆者采用的方法的核心思想是采用3D DoG算子在待配準點云和目標點云間提取具備較強幾何特征的關鍵點,然后采用4PCS算法通過幾何驗證的方法在待配準點云和目標點云的關鍵點云中匹配對應點。點云的離散曲率信息是描述點云局部幾何特性的重要屬性。利用3D DoG算子提取點云在高斯尺度空間下的曲率關鍵點,這類關鍵點具備較強的幾何表征性,可以有效降低對應點匹配的模糊性。然后利用4PCS算法根據幾何驗證匹配對應點,并利用SVD分解計算變換參數(R,T)。最后以粗配準的結果為初值,采用ICP算法迭代優化配準參數。方法流程如圖1所示。
1.1 點云曲率計算
點云的曲率信息可用于表達點云在局部的幾何特性。例如,平面區域的曲率值較小,而在弧面或棱角處的曲率值較大。另外,也可用曲率信息探測點云分布的幾何形狀。例如,在平面區域,點云的高斯曲率和平均曲率值趨近于零;在棱角處最大和最小曲率的方向互相垂直。采用局部曲面擬合法計算點云的離散曲率,具體過程如下:
①建立采樣點[pi]的局部坐標系u,v,w,w是點pi處的法向量方向,u和v位于切平面內且與w垂直。
②以采樣點[pi]為中心,選擇k個鄰近點擬合式(1)描述的二次曲面,并利用最小二乘計算曲面參數。
③根據式(2)、式(3)和上一步中得到曲面的參數和計算主曲率k1、k2,高斯曲率K和平均曲率H。
④重復①至③步驟,可以得到點云在每個采樣點處的曲率值。
需要注意的是,為了降低計算代價,在計算曲率前首先采用體素濾波對原始點云做均勻下采樣。在采樣時為了保持點云的局部幾何信息,通常計算體素內點的質心代替落在體素內的點,從而實現對原始點云的下采樣。
1.2 幾何關鍵點選擇
計算下采樣點云的曲率后,本文利用3D DoG算子提取點云在高斯尺度空間下的曲率關鍵點。DoG算子常被用于圖像特征點的提取(如SIFT、SURF等)。DoG關鍵點的主要優點是其對尺度、旋轉和平移的變換具有不變性。在二維圖像中,DoG算子提取關鍵點的過程是利用不同模糊系數的高斯濾波器對圖像做下采樣,然后對下采樣后相鄰尺度的圖像相減,得到高斯差分圖像,最后在相鄰高斯差分圖中檢測極值點。三維點云中探測具備曲率關鍵點的過程為:
①建立點云的尺度空間。采用一定大小的體素柵格建立點云的體素金字塔,根據式(4)計算在σ尺度空間下采樣后體素的質心坐標pi。
式中:pk為第i個體素中第k個點的坐標,n為該體素包含的點的數量。
②建立DoG尺度空間。設體素金字塔有s層,根據尺度不變特征變換的計算原理,第s層的尺度為σs。
式中:σ0為點云的初始尺度。
③根據式(6)在體素金字塔的每層計算曲率值加權的高斯響應值r。
式中:ρi為采樣點第[i]個鄰近點的曲率,d為采樣點到領域點的距離。
④根據式(7)在DoG尺度空間計算高斯差分值rD。
⑤檢測DoG尺度空間的極值點。若采樣點在其領域點的DoG值是最大值或最小值,則該采樣點是關鍵點。
1.3 基于4PCS算法和標準ICP的點云配準
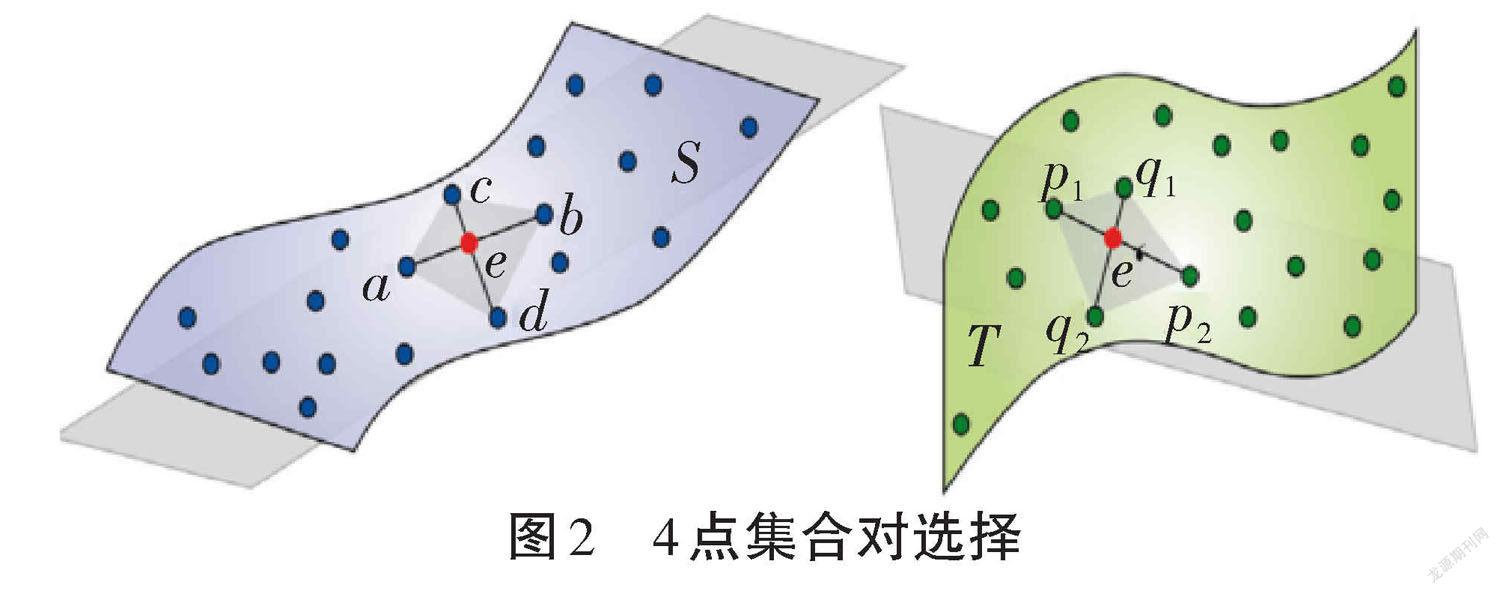
在對下采樣后的點云做曲率關鍵點提取后,分別得到了待配準點云和目標點云的關鍵點云S和T。關鍵點云具有較低的密度和較強的幾何特征。為了在關鍵點云間匹配對應點,如圖2所示,首先采用4PCS算法根據仿射不變特性提取可能的4點集合對,然后利用距離不變性剔除低可靠的4點集合對,最后采用SVD分解計算變換參數。具體處理過程如下。
①在關鍵點云S中提取近似共面的4個點,并根據式(8)計算參數r1和r2。
②采用多次隨機采樣的辦法在關鍵點云T中尋找滿足式(1)的4點集。
③為了提高②中4點集的準確性,利用式(9)和式(10)做幾何驗證,如果不滿足則剔除。
在式(9)和式(10)中,δ1=τ,δ2=4·τ,τ為對點云體素濾波下采樣時體素的大小。
④重復執行①到③即可得到多對4點集合,然后采用SVD分解計算變換參數。
最后,以粗配準得到的變換參數為初值,采用標準的ICP算法對點云做精配準。
2 試驗
2.1 試驗環境與試驗數據
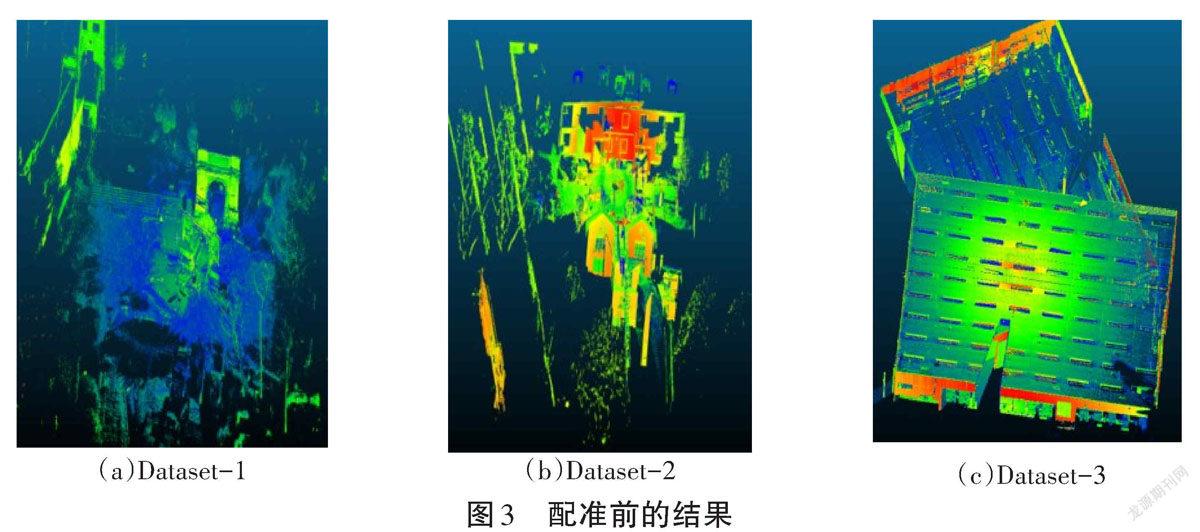
為了驗證上述方法的有效性,采用C++編程語言和點云處理開源庫Point Cloud Library(PCL)實現該方法,并對2組室外場景和1組室內場景的激光點云做配準,程序運行的操作系統為Windows 10,CPU為Intel Core 3.3 GHz,內存為16 Gb的計算機。在配準前,3組數據中待配準點云和目標點云間的相對位置關系如圖3所示。其中,Dataste-1和Dataset-2是用激光掃描儀獲取的室外場景的三維點云,Dataset-3是室內場景的三維點云。
2.2 試驗結果及分析
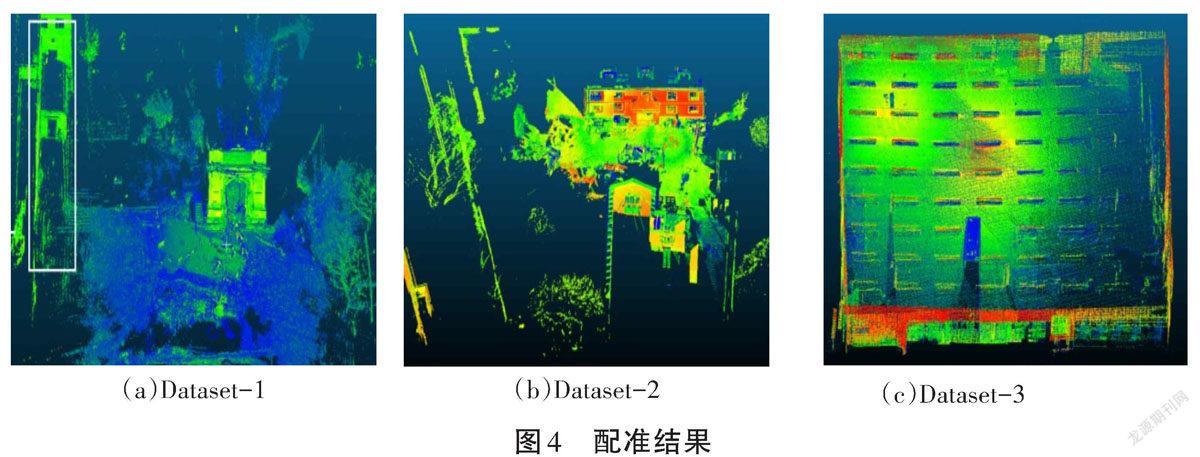
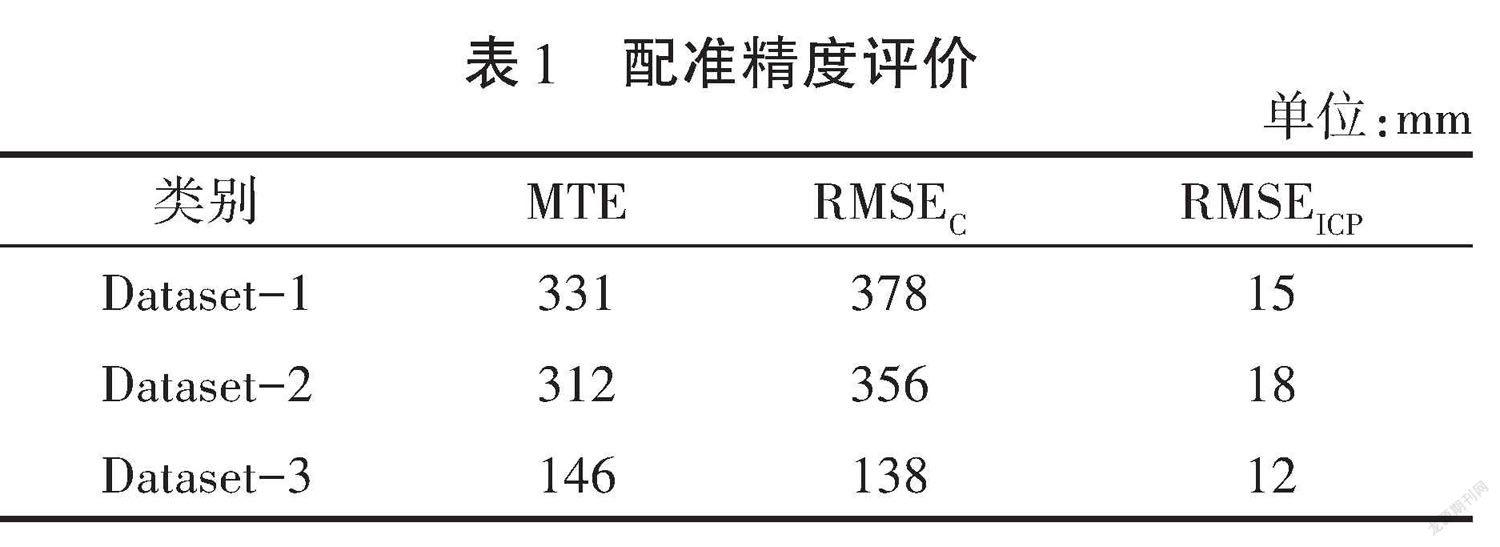
采用第一部分所述方法對3組數據配準后的結果如圖4所示,配準后的精度評價如表1所示。為了定量評價本文方法對激光點云配準的精度,在粗配準后,統計了Mean Translation Error(MTE)和Root Mean Square Error(RMSE),即表1中的RMSEC,在精配準后統計了均方根誤差即表1中的RMSEICP。
試驗結果分析如下。
①從圖4可以發現,采用該方法對室外場景的2組數據配準后,配準的結果較為準確,尤其在圖4(a)中的方框區域可以發現,在邊緣區域也可以得到較好的配準精度。從圖4(c)可以看出,該方法對室內場景配準也可以取得較好的配準效果。
②定量分析。從表1可以看出,在粗配準和精配準后,室內場景點云的配準精度均高于室外場景。這是由于室內場景點云測程較小,噪聲點少。重要的是,室內場景的點云具有更多的幾何特征點,這會提升粗配準的穩健性。從精配準后的均方根誤差可以看出,3組數據的配準誤差均小于2 cm,證明采用本文方法對大場景的激光點云配準可以取得可靠的配準結果。
3 結論
為了降低對應點匹配的模糊性,提出利用3D DoG算子提取下采樣點云中具備曲率不變性的關鍵點,然后利用4PCS算法在關鍵點云中配準對應點。為了提高對應點的內點率,在4PCS算法的基礎上采用幾何約束條件剔除低可靠的4點集合對,從而提高了粗配準的精度。該方法存在的缺點是體素濾波下采樣的體素大小對局部幾何關鍵點提取有較強的影響,根據點云密度及配準精度自適應計算最佳的體素大小是進一步研究的內容。另外,配準的處理流程較為復雜,目前還不能實現激光點云的實時配準。
參考文獻:
[1] 孟蕾,崔珍珍.基于星載點云數據的城市土地利用變化監測自動提取技術[J].北京測繪,2020(7):929-933.
[2] 范偉偉,劉浩然,徐永勝,等.基于地基激光雷達和手持式移動激光雷達的單木結構參數提取精度對比[J].中南林業科技大學學報,2020(8):63-74.
[3] 薛強,畢俊擘,李政國,等.三維激光掃描技術在閻家溝滑坡變形監測中的應用[J].中國地質災害與防治學報,2018(3):108-112.
[4] 趙夫群,周明全.文物點云模型的優化配準算法[J].計算機應用研究,2017(12):3885-3888.
[5] 付紅安.基于多尺度特征向量的輸電線跑無人機LiDAR點云數據分類方法[J].山東農業大學學報(自然科學版),2019(5):852-854,864.
[6] 楊玉榮,李峰.基于激光點云掃描的高精導航地圖關鍵技術研究[J].現代計算機(專業版),2018(9):23-26.
[7] 苗沛基,盧小平,李英成,等. 融合傾斜攝影和點云的公路沿線精細化三維重建方法[J].測繪與空間地理信息,2020(6):67-69,74,80.
[8] HABIB A,DETCHEV I,BANG K.A comparative analysis of two approaches for multiple-surface registration of irregular point clouds[J]. Remote Sens. Spatial Info. Sci.,2010(1):61-66.
[9] DONG Z,LIANG F,YANG B, et al. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 163:327-342.
收稿日期:2021-12-02
作者簡介:于振(1993—),男,碩士,助教,研究方向:攝影測量。
3601500338257
猜你喜歡
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
兒童故事畫報(2019年5期)2019-05-26 14:26:14
河南畜牧獸醫(2016年24期)2016-11-29 01:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國衛生(2014年2期)2014-11-12 13:00:16
語文知識(2014年7期)2014-02-28 22:00:26
