懸浮控制參數對磁浮車輛與道岔梁耦合振動的影響分析
2022-03-11 03:32:02楊志南馮洋劉東生趙春發
機械 2022年2期
關鍵詞:振動
楊志南,馮洋,劉東生,趙春發*,
懸浮控制參數對磁浮車輛與道岔梁耦合振動的影響分析
楊志南1,馮洋2,劉東生2,趙春發*,2
(1.中鐵第一勘察設計院集團有限公司,陜西 西安 710043;2.西南交通大學 牽引動力國家重點實驗室,四川 成都 610031)
建立了包含PID懸浮控制系統的兩節編組磁浮列車動力學模型和細致的道岔梁有限元模型,仿真分析了不同懸浮控制參數條件下磁浮列車以30 km/h通過道岔梁時的動力學響應。仿真結果表明,間隙反饋系數取值偏小時,電磁鐵懸浮間隙的波動幅值較大,不利于行車安全;增大間隙反饋系數,電磁懸浮系統的特征頻率逐漸接近道岔梁的一階垂彎模態頻率,導致車岔耦合振動更強烈。間隙速度反饋系數取值較小時,電磁懸浮系統的阻尼偏小,車體振動加速度較大;間隙速度反饋系數取值偏大時,微分環節超前調節作用過強,車岔耦合振動劇烈。為緩解磁浮車輛與道岔梁的耦合振動,建議間隙反饋系數在7000~8000之間選取,速度反饋系數在45~60之間選取。
磁浮列車;道岔;反饋控制;耦合振動;數值仿真
常導電磁懸浮型(EMS,Electromagnetic Suspension)磁浮列車采用電磁吸力支承和導向車輛,以直線感應電機驅動列車前進,具有振動小、噪聲低、乘坐舒適及爬坡能力強等優點,近年來在國內外得到快速發展與應用。目前,我國已開通運營上海高速磁浮線、長沙磁浮快線和北京地鐵S1磁浮線,還有正在建設的清遠磁浮旅游線和鳳凰磁浮旅游線。EMS磁浮交通的技術優勢在上述工程應用中已得到證實,但同時也有一些工程問題沒有得到很好的解決。例如,國內外EMS磁浮列車研發和試運營期間,都曾出現過車輛與鋼梁強烈耦合振動的問題[1-9],嚴重時甚至導致懸浮失穩,出現電磁鐵砸軌現象。
為減緩磁浮車輛與鋼梁的耦合振動,工程上采用了提高鋼梁剛度及結構阻尼或安裝外部吸能裝置等措施,如上海高速磁浮線對維修基地鋼框架梁進行加固[3],在鋼道岔梁上加裝調諧質量減振器(TMD,Tuned Mass Damper)[4]。長沙磁浮快線在道岔主動梁中間增設支承臺車,并且在梁上安裝液體質量雙調諧減振器(TLMD,Tuned Liquid Mass Damper)[6-9]。這些被動減振措施增加了磁浮道岔的制造安裝成本,不利于EMS磁浮交通的推廣應用,因此,很有必要從優化懸浮控制的角度探索減緩車岔耦合振動的方法。事實上,已有研究表明全狀態反饋最優控制、瞬時最優控制、自適應控制等能有效抑制磁浮車軌耦合振動[10-13],但這些控制算法相對復雜,工程實施困難,且參數調節不方便,故工程實際仍采用經典的PID控制算法。
對于采用PID懸浮控制的EMS磁浮列車,已有試驗研究對不同工況下車輛和道岔梁的振動響應進行了細致分析[6-9],但極少研究控制參數對系統動力學響應的影響,相關的數值模擬研究也很少見,因此,如何調整懸浮控制參數來減緩車岔耦合振動還缺乏成熟的理論指導。為此,本文結合國內某中低速磁浮線工程,建立兩節編組磁浮列車多體動力學模型、PID懸浮控制模型和三段鉸接式磁浮道岔有限元模型,仿真分析低速運行條件下磁浮車輛與道岔梁的耦合振動響應,重點研究懸浮控制器比例系數、微分系數對車岔耦合振動的影響,從避免磁浮車岔耦合振動過大的角度提出懸浮控制參數的取值建議。
1 車岔耦合振動分析模型
1.1 車輛動力學模型
中低速磁浮車輛由車體、二系懸掛系統、迫導向機構、懸浮架、懸浮電磁鐵、直線電機定子件以及各種輔助裝備組成。通常每車配備五個懸浮架,懸浮架由側梁、托臂、抗側滾裝置等組成。懸浮電磁鐵與懸浮架托臂、托臂與側梁之間通過螺栓連接,直線電機定子件安裝于側梁底面,組成具有懸浮、導向和牽引功能的懸浮模塊。抗側滾裝置由左右兩片抗側滾梁和吊桿組成,在抑制懸浮模塊側滾的同時,允許左右模塊之間發生小范圍的相對運動。車輛左右側第2、5位空簧上部的承臺與車體底部固結,其他位空簧上部通過可橫向移動的滑臺與車體相連。在第1、3位滑臺和第4、6位滑臺之間還設置了迫導向機構。迫導向機構由T型臂、橫向拉桿和鋼纜組成,用以提高磁浮車輛曲線通過能力。
在磁浮車輛結構分析的基礎上,考慮到單節磁浮車輛的長度約為15 m,而磁浮道岔主動梁的長度約為19 m,因此,在滿足道岔主動梁可滿跨受力的條件下,為提高模型計算效率,使用SIMPACK軟件建立了兩節編組磁浮列車動力學模型。單節車輛的動力學模型如圖1所示,其中將車體、懸浮模塊、抗側滾梁、可移動滑臺、T型臂、橫向拉桿、牽引拉桿等視為剛體,將二系空氣彈簧簡化為線性彈簧阻尼器。車體考慮除縱向運動之外的5個自由度,懸浮模塊考慮6個運動自由度,抗側滾梁具有獨立的搖頭自由度,移動滑臺相對車體僅具有橫向平移自由度,每車共有141個剛體運動自由度。中低速磁浮車輛模型的主要參數如表1所示。
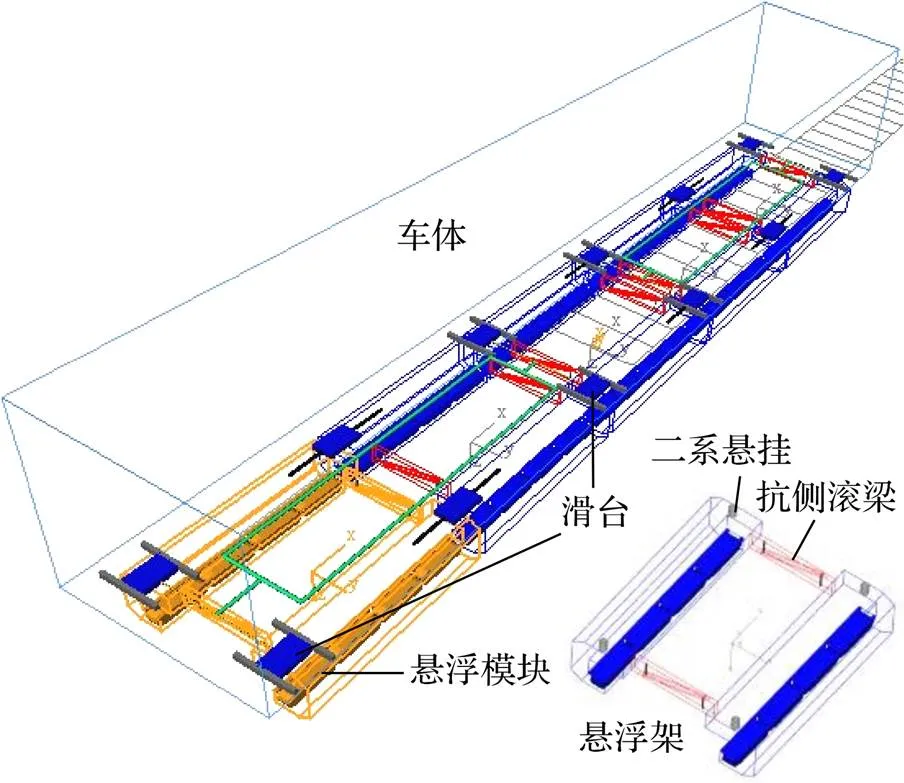
圖1 中低速磁浮車輛模型
1.2 懸浮控制模型
中低速磁浮車輛每個懸浮電磁鐵包含四個線圈繞組,分為前后兩組,分別受控于前、后懸浮控制器,即每個懸浮電磁鐵包含兩個相對獨立的懸浮控制點,因此,可針對單點懸浮系統(圖2)進行懸浮控制系統的設計與建模分析。

表1 中低速磁浮車輛模型主要參數

u為電磁鐵線圈電壓,V;i為電磁鐵線圈電流,A;δ為懸浮間隙,mm。
運用牛頓第二定律,可推導出單點懸浮系統的垂向動力學方程為:

根據電磁感應定律,可得到電磁鐵線圈的電壓和電流關系式為:

對于式(1)、式(2)組成的三階電磁懸浮系統,一般采用如圖3所示的雙環控制器進行懸浮控制[14-15]。

δ0為額定間隙,mm;kc為電流環比例系數;i0為初始電流,A;s為拉氏變換因子。
圖3中,電流環采用比例或比例-積分反饋控制,目的是使線圈電流以最快速度跟蹤控制電壓,避免電流延時引起懸浮失穩;位置環可設計為懸浮間隙、間隙速度和電磁鐵加速度的反饋控制,主要目的是實現恒定的懸浮間隙。


對于式(3)所示被控系統,引入電流負反饋和比例控制,可得電流環的閉環傳遞函數為:

對比式(3)、式(4)可知,選取合適的比例系數后,電流環的時間常數將遠小于開環電壓-電流系統的時間常數,線圈電流可快速跟蹤控制電壓,使得懸浮系統演變為二階系統,從而可以將電流視為位置環的控制量。
將式(1)中的電磁力計算項在平衡點(0,0)附近線性化,得到單點懸浮系統的線性化模型為:

對線性化系統采用PID控制算法,同時附加電磁鐵加速度反饋以壓縮系統頻帶,則電磁鐵線圈電流的控制律為:

將式(6)代入式(5),忽略消除系統穩態誤差的間隙積分項和壓縮系統頻帶的加速度反饋項,可得到平衡點附近閉環懸浮系統的動力學方程為:

由式(7)可得到:
式中:為主動控制磁懸浮系統的特征頻率,Hz;ξ為阻尼比。
由式(8)可知,如果增大間隙反饋系數,但間隙微分反饋系數保持不變,則增大,ξ減小;若增大間隙微分反饋系數,但間隙反饋系數保持不變,則不變,ξ增大。
按照上述雙環控制器設計原理,使用MATLAB軟件建立懸浮控制模型,并利用SIMPACK軟件的MatSIM接口導入建立的磁浮車輛動力學模型。
1.3 道岔梁有限元模型
中低速磁浮交通三段鉸接式道岔主要由主動梁、第一從動梁、第二從動梁、垛梁、驅動裝置、鎖定裝置以及電氣系統等組成[16]。道岔主體結構圖4所示。

1.活動端垛梁;2.主動梁;3.第二從動梁;4.第一從動梁;5.固定端垛梁。
圖4中,主動梁、第一和第二從動梁的長度分別為19.8 m、4.8 m和5 m,主動梁中間處梁高1.4 m,隔板間距1.2 m,腹板厚度24 mm。使用ANSYS軟件建立道岔有限元模型如圖5所示,其中支座處采用彈性約束,梁體選用SHELL181殼單元建模,網格尺寸為100 mm,單元數量約4.1萬,詳細建模過程參見文獻[17]。

圖5 磁浮道岔梁有限元模型
有限元模態分析表明,磁浮道岔的前六階模態頻率分別為8.60 Hz、15.77 Hz、18.99 Hz、20.90 Hz、25.47 Hz和31.99 Hz。文獻[18]中實測獲得的道岔主動梁第一階橫向彎曲自振頻率為8.5 Hz,第一階垂向自振頻率均值為15.7 Hz,與有限元模型前兩模態頻率的誤差分別為1%和0.4%,多個實測高階特征頻率與計算結果也較接近,說明建立的道岔有限元模型符合實際。
在后文的仿真計算中,為了模擬磁浮列車進出道岔的動力學響應,在圖5模型的前后端均建立了2跨跨度25 m的混凝土軌道梁模型。此外,基于德國高速低干擾軌道譜生成磁浮軌道不平順樣本[18],將其作為動力學仿真計算時的線路不平順激擾。
1.4 耦合振動計算方法
利用作者所在課題組開發的磁浮交通系統分布式協同仿真平臺實現SIMPACK車輛模型和ANSYS有限元模型的協同仿真,仿真平臺包括兩臺工作站、SIMPACK軟件、ANSYS軟件以及自主開發的接口程序和耦合計算器[19]。車輛模塊和道岔模塊通過接口程序與耦合計算器進行數據交互和耦合計算,耦合器控制不同計算機上的任務模塊輸入輸出數據的收發和仿真時序,并通過網絡通知相應的執行機(SIMPACK計算器和ANSYS計算器)。
2 車岔耦合振動響應特性
磁浮車輛與道岔梁強烈耦合振動多發生在車輛低速通過時,速度較高時耦合振動并不明顯,因此,本節計算了車輛以30 km/h速度通過道岔時的動力學響應。選取了兩組懸浮控制參數,A組參數為:=9000,=70,=500,對應的=10.8 Hz,ξ=0.04。B組參數為:=13000,和取值與工況A相同,變為14.0 Hz,ξ=0.03。
2.1 振動響應時域分析
圖6分別給出了采用A、B組控制參數時頭車車體質心垂向加速度、頭車右側第5位電磁鐵前端的懸浮間隙和懸浮力的時程曲線。

圖6 以30 km/h速度過岔時車輛動力學響應
由圖6(a)可知,A組和B組控制參數對應的車體質心加速度均較小,最大值分別為0.04 m/s2和0.14 m/s2,后者較前者增加250%。由圖6(b)可知,列車進入道岔主動梁以后,兩組控制參數條件下懸浮間隙的調整頻率和幅度均明顯增大,間隙波動幅值分別為0.51 mm和0.81 mm,小于其允許波動限值4 mm。由圖6(c)可知,列車進出道岔時電磁鐵懸浮力有明顯的突變,這是因為混凝土軌道梁和道岔梁之間存在較大的豎向剛度差;同樣,車輛進出道岔主動梁時,懸浮力的波動較為劇烈,這是因為從動梁的豎向剛度明顯大于主動梁,主動梁滿跨受載時其梁端轉角也較大。其中,采用B組控制參數時,主動梁上單個線圈最大懸浮力達到11.32 kN,較其額定懸浮力8 kN增大41.5%。
圖7是磁浮車輛以30 km/h速度通過時主動梁跨中的垂向位移和垂向加速度時程響應。計算結果表明,采用A組控制參數時,主動梁跨中垂向位移最大值為1.92 mm,垂向加速度最大值為6.5 m/s2;采用B組參數時,跨中垂向位移最大值為2.7 mm,垂向加速度最大值達到13.6 m/s2;采用B組參數時,主動梁跨中垂向位移和垂向加速度幅值較A組參數分別增加40.6%和109.2%。由圖7還可知,當間隙反饋系數由9000增大到13000以后,列車駛出主動梁時的振動響應更加劇烈,這與圖6(c)中懸浮力的響應規律一致。
綜合分析圖6和圖7可知,兩組控制參數條件下,磁浮車輛和道岔梁均發生了明顯的耦合振動。特別當懸浮間隙反饋系數增大到13000以后,由于電磁懸浮系統的特征頻率更接近道岔梁的豎向基頻,磁軌動力作用更為劇烈,故車輛系統和道岔主動梁振動響應更強烈。
2.2 振動響應頻譜分析
圖8是頭車右側第5位電磁鐵前端懸浮間隙響應的頻譜圖。可以看出,兩組控制參數條件下懸浮間隙響應的優勢頻率均在5 Hz以內,它們與車輛二系懸掛頻率和懸浮架固有頻率有關;由于懸浮間隙響應包含了道岔梁的垂向位移響應,主動梁的第一、二階垂彎模態頻率在頻譜圖中也有明顯表現。

圖7 以30 km/h速度過岔時主動梁動力學響應

圖8 第5位電磁鐵前端懸浮間隙響應頻譜
圖9給出了頭車右側第5位電磁鐵前端的懸浮力響應頻譜圖。采用A組控制參數時,電磁懸浮力的第一、二階主頻分別為31.23 Hz和15.19 Hz;采用B組控制參數時,懸浮力的第一、二階主頻分別為15.67 Hz和31.23 Hz。可見,懸浮力的響應主頻接近于道岔主動梁的前兩階垂彎模態頻率。進一步對主動梁跨中的垂向加速度響應進行頻譜分析,發現其主頻分布與圖9相似,僅幅值略有差別,不再給出。

圖9 第5位電磁鐵前端懸浮力響應頻譜
上述頻譜分析表明,A組和B組控制參數條件下,電磁懸浮力的調整頻率總是與主動梁的低階垂彎自振頻率接近。對于B組控制參數,由于平衡點附近電磁懸浮系統的特征頻率更為接近主動梁的第一階垂彎模態頻率,導致磁浮車輛與道岔梁的耦合振動更為劇烈。
3 控制參數對耦合振動的影響
從改變電磁懸浮系統特征頻率(剛度)和阻尼的角度出發,開展間隙反饋系數、間隙微分反饋系數對磁浮車岔耦合振動的影響分析,其中k取值范圍為5000~15000,k取值范圍為20~80[20]。
3.1 間隙反饋系數影響分析
為探究k對磁浮車岔耦合振動的影響,將k設定為70、k設定為500,k分別取5000、7000、9000、11000和13000。相應的,平衡點附近,在4.7~14 Hz之間變化,ξ在0.40~0.79之間變化。
圖10顯示了頭車和尾車車體質心垂向加速度隨k的變化曲線。可知,頭、尾車車體質心的垂向加速度均隨k的增加而增大;當k>9000后,車體質心加速度幅值隨k的增長速度變大,說明增大電磁懸浮的剛度會導致車體垂向振動加速度增大,從而降低列車運行平穩性。
圖11給出了頭車和尾車右側第5位電磁鐵前端的懸浮間隙波動量隨k的變化曲線。可以發現,懸浮間隙波動幅值總體上隨k的增大先快速減小后趨于穩定;當k>7000以后,懸浮間隙波動幅值差別不大。可見,k取值較大時,電磁懸浮系統的剛度較大,從而降低了懸浮間隙的波動幅值,有利于預防磁軌發生碰撞。

圖10 車體垂向加速度與kp的關系

圖11 懸浮間隙波動幅值與kp的關系
圖12給出了頭、尾車右側第5位電磁鐵前端的懸浮力方差隨k的變化曲線。結果表明,k越大,電磁懸浮力的方差越大,這與圖10中車體質心加速度的變化規律一致,說明增大k將加劇車輛與道岔梁之間的動力作用水平。

圖12 懸浮力方差與kp的關系
圖13是主動梁1/4跨、跨中和3/4跨處梁體的垂向加速度幅值與k的關系曲線。可以發現,不同位置處梁體的垂向加速度總體上均隨k的增大而增大;當k>7000后,1/4跨和3/4跨處主動梁的振動加速度明顯大于跨中處,說明列車進出主動梁時的車岔耦合振動更劇烈。

圖13 主動梁垂向加速度與kp的關系
綜合分析圖10~13可知,單獨增大懸浮控制器的間隙反饋系數,相當于增大了電磁懸浮的剛度,電磁懸浮系統的特征頻率隨之增大,并逐漸接近道岔主動梁的一階垂彎模態頻率,此時,盡管電磁鐵懸浮間隙波動量不會明顯增大,但車輛與道岔梁的振動加速度、電磁懸浮力方差均明顯增大。
3.2 間隙微分反饋系數影響分析
將k設定為9000,k設定為500,k分別取30、45、60和70。相應的,平衡點附近,=10.8 Hz,ξ在0.17~0.4之間變化。
圖14給出了頭、尾車車體質心垂向加速度與k的關系曲線。可以看出,k增大后,ξ增大,車體質心加速度隨k的增大呈現先減小后緩慢增大的趨勢,但車體質心垂向加速度幅值均很小,總體上中等大小的k有利于降低磁浮車輛的振動響應。

圖14 車體質心垂向加速度與kd的關系
圖15是頭、尾車右側第5位電磁鐵前端的懸浮間隙波動量與k的關系曲線,可以看出,電磁鐵懸浮間隙波動量總體上隨k的增大而變化不大。圖16給出了頭、尾車右側第5位電磁鐵前端的懸浮力方差與k的關系曲線,可以看出,懸浮力方差隨k的增大先減小后增大,k在45~60范圍內取值時磁浮車輛和道岔梁的動力作用水平較低。

圖15 懸浮間隙波動幅值與kd的關系

圖16 懸浮力方差與kd的關系
圖17給出了主動梁1/4跨、跨中和3/4跨處垂向加速度與k的關系曲線。可以發現,不同位置處梁體的垂向加速度均隨k的增大先緩慢減小后快速增大;當k>60后,盡管電磁懸浮系統的阻尼更大,但較大的k加劇了系統的振蕩,使得車岔耦合振動更為劇烈。

圖17 主動梁垂向加速度與kd的關系
由圖14~17可知,隨著k的逐步增大,由于電磁懸浮系統的阻尼隨之增大,車岔耦合振動響應先呈現為減小趨勢;但是,當進一步增大k時,超前調節作用過強,使得系統動態性能惡化;因此,過小或過大的k均有可能導致車岔耦合振動強烈。
4 結論
結合國內某中低速磁浮線工程,仿真分析了磁浮列車以30 km/h速度通過道岔梁時的動力學響應,得到以下結論:
(1)對比分析了間隙反饋系數為9000和13000時的車岔耦合振動響應,由于后者的懸浮剛度更大,電磁懸浮系統的特征頻率與道岔主動梁的一階垂彎模態頻率接近,故磁浮車岔耦合振動更為劇烈。道岔主動梁梁端轉角、主動梁與混凝土梁之間的豎向剛度差導致磁浮列車出岔時車岔耦合振動明顯增大,其中主動梁振動加速度增長最為顯著。電磁懸浮力、道岔主動梁振動加速度的響應頻率以主動梁的前兩階豎彎模態為主,而懸浮間隙的響應頻率則以5 Hz以下的低頻為主。
(2)當間隙微分反饋系數不變、間隙反饋系數由5000逐漸增加到13000時,車體豎向加速度、電磁力方差、主動梁豎向加速度的響應幅值均隨間隙反饋系數的增大而增大,但懸浮間隙波動量先快速減小后平緩變化。間隙反饋系數在7000~8000范圍內取值時,磁浮車岔耦合振動響應較小。
(3)當間隙反饋系數不變、間隙微分反饋系數由30逐漸增加到70時,車體垂向加速度和懸浮間隙波動量隨間隙反饋系數的增大先明顯減小后平緩變化,懸浮力方差和主動梁加速度先減小后增大。間隙微分反饋系數在45~60之間取值時,磁浮車岔耦合振動響應較小。
[1]翟婉明,趙春發. 現代軌道交通工程科技前沿與挑戰[J]. 西南交通大學學報,2016,51(2):209-226.
[2]Fichtner K,Pichlmeier F. The Transrapid guideway switch test and verification[C]. Shanghai:Proceedings of the 18th International Conference on Magnetically Levitated Systems and Linear Drives,2004:624-631.
[3]李莉,孟光. 慢起慢落時磁浮車輛與鋼軌道框架耦合共振分析[J]. 振動與沖擊,2006,25(6):46-48.
[4]殷月俊,羅漢中,黃醒春. 高速磁浮道岔振動響應的原位實測[J]. 上海交通大學學報,2007,41(4):658-663.
[5]Zhao Chunfa,Gu Xingtao,Xiao Zhou. Dynamic analysis of maglev train and switch beam coupled system[C]. Chengdu:Advance in Environmental Vibration,the 5th International Symposium on Environmental Vibration,2011:528-533.
[6]靖仕元. 多重調諧質量調諧阻尼器的磁浮道岔減振方案[J]. 鐵道工程學報,2019,36(4):80-83,89.
[7]柴小鵬,汪正興,王波,等. 磁浮工程道岔梁的TLMD減振技術研究[J]. 世界橋梁,2017,45(2):60-65.
[8]劉大玲. 中低速磁浮道岔動載試驗方法研究[J]. 城市軌道交通研究,2017,20(5):89-92.
[9]羅華軍,吳志會,佟來生,等. 中低速磁浮交通車岔耦合振動研究[J]. 電力機車與城軌車輛,2018,41(1):5-8.
[10]王輝,鐘曉波,沈鋼. 彈性軌道梁上磁懸浮控制方法[J]. 交通運輸工程學報,2013,13(5):33-38,46.
[11]黎松奇,張昆侖,劉國清,等. 基于逆系統方法的磁浮列車非線性控制[J]. 控制工程,2017,24(8):1542-1546.
[12]李曉龍,翟明達,郝阿明. 基于輸出飽和條件的磁浮列車懸浮控制參數優化[J]. 國防科技大學學報,2017,39(4):149-153.
[13]周丹峰,李杰,余佩倡,等. 磁浮交通軌排耦合自激振動分析及自適應控制方法[J]. 自動化學報,2019,45(12):2328-2343.
[14]李云鋼,常文森. 磁浮列車懸浮系統的串級控制[J]. 自動化學報,1999,25(2):107-111.
[15]劉恒坤,常文森. 磁懸浮列車的雙環控制[J]. 控制工程,2007,14(2):198-2000.
[16]曾國鋒,袁亦竑,吉文,等. 長沙中低速磁浮工程的道岔設計與調試[J]. 城市軌道交通研究,2016,19(5):44-48.
[17]張宇生,趙春發,周文,等. 不同約束條件下中低速磁浮道岔主動梁自振特性[J]. 鐵道標準設計,2020,64(4):22-27.
[18]任曉博,趙春發,馮洋,等. 中低速磁浮車輛-軌道-橋梁垂向耦合振動仿真分析[J]. 鐵道標準設計,2019,63(2):70-76.
[19]李倩,黃海于,馮洋,等. 磁浮交通系統動力學分布式協同仿真接口的設計與實現[J]. 計算機應用,2019,39(S1):164-167.
[20]趙春發,翟婉明. 常導電磁懸浮動態特性研究[J]. 西南交通大學學報,2004,39(4):464-468.
Influence of Levitation Control Parameters on Coupled Vibration Between Maglev Vehicles and Switch Girder
YANG Zhinan1,FENG Yang2,LIU Dongsheng2,ZHAO Chunfa2
(1.China Railway First Survey and Design Institute Group Co., Ltd., Xi’an 710043, China;2.State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
In this paper, a dynamic model of two-car maglev trainset is built considering the PID levitation control system, meanwhile, a detailed finite element model of the switch girder is also established. Then, they are used to calculate dynamic response of maglev train with different levitation control parameters whenit passes through the switch girder at a speed of 30km/h. The simulated results show that the levitation airgap fluctuation become larger when the airgap feedback coefficient is small, which is unfavorable for train ride safety. With the increase of airgap feedback coefficient, the characteristic frequency of electromagnetic levitation system gradually approaches the first-order vertical bending modal frequency of the switch girder, which leads to stronger coupled vibration. When the airgap velocity feedback coefficient is small, the damping of electromagnetic levitation system is small, so the vibration acceleration of carbody become larger. If the airgap velocity feedback coefficient is quite large, the coupled vibration is violent due totoo strong lead compensation effect. In order to alleviate the coupled vibration between maglev vehicles and the switch girder, it is suggested to select the airgap feedback coefficient between 7000 and 8000 and the airgap velocity feedback coefficient between 45 and 60.
maglev train;switch;feedback control;coupled vibration;numerical simulation
U237;U441+.3
A
10.3969/j.issn.1006-0316.2022.02.006
1006-0316 (2022) 02-0038-09
2021-07-09
中鐵第一勘察設計院集團有限公司課題:磁浮道岔優化創新及選型研究(院科18-05);國家重點研發計劃課題子任務:高速磁浮車輛動力學性能匹配設計理論與技術(2016YFB1200602-15)
楊志南(1991-),男,天津薊州人,工程師,主要從事鐵路站場設計工作,E-mail:1569156195@qq.com。*通訊作者:趙春發(1973-),男,湖北仙桃人,博士,研究員,主要研究方向為軌道交通工程動力學,E-mail:cfzhao@swjtu.edu.cn。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00