模塊化桁架機構動力源的設計和優化方法
2022-03-11 03:32:42李志勇林秋紅盆洪民曹子振
機械 2022年2期
李志勇,林秋紅,盆洪民*,,曹子振
模塊化桁架機構動力源的設計和優化方法
李志勇1,林秋紅2,盆洪民*,1,曹子振1
(1.天津航天機電設備研究所,天津 300458;2.北京空間飛行器總體設計部,北京 100094)
模塊化桁架機構其動力源系統由于需兼顧多自由度、最簡原則、可擴展性和空間環境,需要在應用中進行優化設計。本文針對一種模塊化的多自由度空間可展開桁架機構,分析了模塊化機構特性,包括單模塊機構自由度和多模塊機構組合特性,具體介紹了動力源的設計過程和優化方法,基于動力學虛擬樣機技術進行了有源動力源與無源動力源的參數匹配性優化設計,提高了模塊化機構的展開動力學特性和穩定性,降低了對主動動力源的功率需求。
模塊化;展開機構;動力學仿真;動力源
隨著衛星SAR(Synthetic Aperture Radar,合成孔徑雷達)天線口徑的日益增大,平面天線展開機構的規模和復雜程度也迅速提高,模塊化桁架機構以其單一構型、大收納比、良好可擴展性和高集成效率成為大型空間展開機構的熱點[1-3],而模塊化機構展開動力源的設計由于存在多自由度、系統柔性大引起模塊間動力傳遞延遲等問題成為研究難點之一[4]。一般情況下,動力源為機構的運動提供主動力(矩),通常采用有源和無源兩種動力形式。有源形式主要指直流或交流電機,無源形式的動力源主要有應變能和相變能類。在空間環境下,體積大、載荷重、展開精度和重復精度要求高、且對沖擊有限制的展開機構,必須采用有源動力源,但彈簧動力源依然可以作為伸展或展開運動的輔助動力源,以克服啟動階段較大的靜摩擦[5]。何宏滿[6]針對環肋可展開天線的驅動結構存在的間隙問題,開展運動動力學模型仿真,認為拉簧驅動繩索的轉動方式,關節展開過程平穩性最好。劉榮強等[7]基于復數法和機構單元拆分思想分別進行了單模塊和多模塊展開機構的幾何建模,通過對模塊化可展開天線支撐機構進行動力學分析,通過受力變化趨勢分析施加驅動源位置的優劣,為多模塊可展開機構機械設計和控制提供依據。車明奎[8]基于蒙特卡洛方法研究了在配置內、外驅動源的情況下平面廣義可展開機構展開過程中位置分布以及誤差頻率分布,結果表明,配置內部驅動源可提高可展開機構的展開平穩性和展開精度精度。張朝[9]對大型可展開空間機構構型中三棱臺模塊單元進行運動學分析,結果表明滑動關節驅動方式可避免機構在折疊過程初期因受力過大而產生劇烈震蕩,而在接近完全折疊狀態時加速收攏可節省時間。郭宏偉等[10]通過建立可展機構拉格朗日動力學模型,求解出機構運動過程驅動力,認為可通過減小輸入速度、調整球鉸位置和減小初始夾角來降低機構翻轉過程驅動力。
綜上所述,研究者在空間大型展開機構驅動方式、動力源位置分布以及機構展開性能方面開展了相關理論研究,但在模塊化大型桁架展開機構結構構型、多模塊組網、具體驅動方式以及分析方法等關鍵問題上仍需進一步開展研究。因此,本文針對一種模塊化的多自由度SAR天線大型可展開支撐桁架機構,進行多模塊機構組合運動分析、多動力源間的設計參數匹配性優化與仿真驗證,給出了電機與儲能彈簧的匹配性優化設計思路和方法。
1 模塊化機構特性分析
1.1 單模塊機構自由度分析
模塊化支撐桁架機構一般可劃分為若干基本構成單元,本文介紹的模塊化可展開支撐桁架由第一模塊和后續模塊連接構成。第一模塊由于直接與星體連接,與后續模塊僅存在上連接桿構型的差異,而后續各模塊構型完全一致。理論上后續模塊數量可持續增加,但由于航天器對載荷有一定剛度要求,因此模塊數量的增加需要首先考慮載荷基頻是否滿足指標要求。
模塊化桁架機構的動力源需求分析應首先進行基本機構模塊的展開運動學分析。桁架可展開機構可以簡化為平面運動,因此將可展開機構投影到-平面后進行運動分析[11]。圖1(a)為第一模塊桁架的機構運動簡圖,其自由度為2,所有桿件間由轉動副連接。圖中兩個矩形所示為兩個待展開的SAR天線板,桁架桿與天線板共同構成連桿機構。后續單模塊機構是將第一模塊的上連接桿替換為線性伸展機構,其自由度為1。對第一模塊桁架機構進行空間位置建模和初步運動學分析,以角度1和4為輸入角度,進行勻速驅動可以得到第一模塊展開過程中各個時刻的空間位置軌跡[5],如圖1(b)所示。圖中圓圈處為鉸接,由圖可看出第一模塊桁架機構可以連續運動。
1.2 多模塊機構組合特性分析
進行模塊化組合,第一模塊與后續單模塊平板間采用鉸接連接,桁架頂部接頭間串接線性伸展機構,即構成多模塊展開機構,各模塊的展開速度通過線性伸展機構實現同步[12]。通過對多模塊(模塊數≥2)展開機構進行自由度分析,可知第一模塊引入一個單自由度后續模塊的同時引入一個線性伸展機構連接約束,其自由度不變,即模塊展開機構的自由度數保持為2。
為保證在軌展開過程中航天器姿態質心的穩定性,一般要求空間大型載荷展開機構的運動軌跡單一確定。因此,本多模塊可展開桁架機構主動動力源配置數量應為2。以第一模塊角度1和4為輸入角度(圖1a),對雙模塊桁架機構進行展開運動學分析。運動學分析采用MATLAB軟件進行,首先編制各個運動模塊獨立的子程序,然后對機構進行分解,分解的模塊分別調用編制的子程序,實現展開機構運動學分析的模塊化建立。用MATLAB軟件對結果進行可視化處理,整個機構的展開過程如圖2所示。
1.3 分析結果
模塊化可展開桁架機構的運動特性分析需從基本組成單元和多單元組合兩方面逐次開展。通過建立機構數學模型,對單模塊、多模塊展開機構進行運動過程分析可以掌握模塊化機構各運動副運動特性,為動力源配置和展開驅動方案的設計提供數據基礎[13]。

圖1 第一模塊桁架機構展開軌跡分析
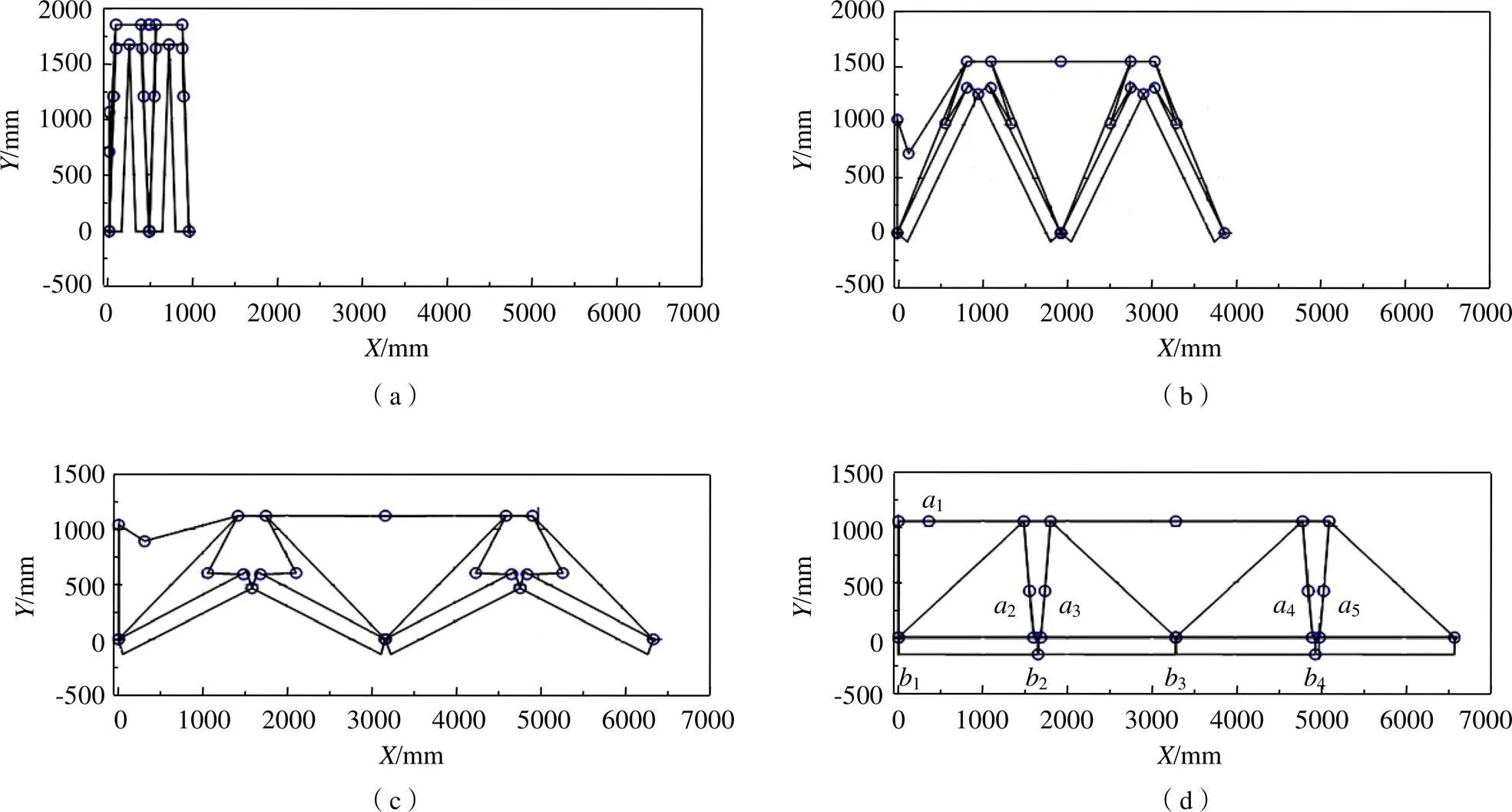
圖2 雙模塊機構展開過程分析
2 動力源設計和優化過程
2.1 有源動力源布局設計
以雙模塊桁架機構為例,進行動力源布局優化設計。如前所述,機構自由度為2,需配置M1和M2兩臺電機,布局方案有二:方案1,電機M1布置于1,電機M布置于2;方案2,電機M1布置于1,電機M2布置于3(圖2)。
為驗證以上兩方案的優劣,進行雙模塊桁架可展開機構的剛體動力學仿真分析。在ADAMS軟件中建立仿真模型,所有部組件間的連接采用理想運動副約束,運動副布置在圖2所示的各連接處,包括有運動關系的桁架桿之間、桁架桿與天線板之間、桁架桿與星體之間、天線板與星體之間、天線板與天線板之間。M1和M2安裝電機處,分別采用角速度控制的輸入動力源。同時,為提高仿真的準確性,采用接觸碰撞模型模擬實際鉸接觸的力學狀態,具體見2.3節。完成模型建立后,對模型賦予質量特性、慣量特性、剛度特性等物理特性。剛體動力學模型中,天線板與桁架桿件均作為剛體處理,桁架桿采用圓柱體建模代替實際的圓管,天線板采用長方體建模。經過剛體動力學仿真可得到電機不同布局方案下的動力學參數。對以上兩套電機方案進行比較,結果如圖3所示。
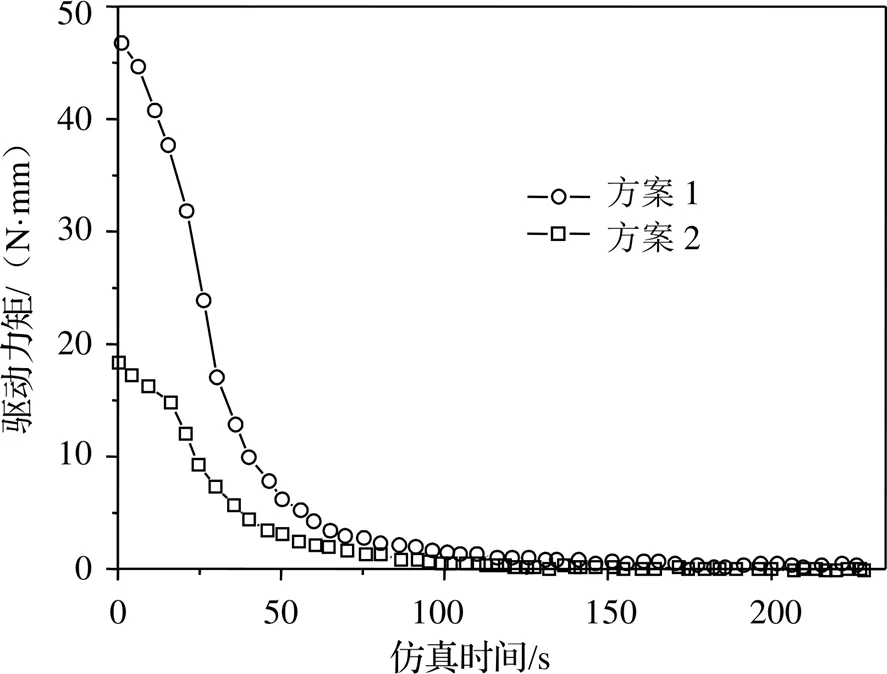
圖3 電機布局方案比較
最終發現方案1更優:電機M2的展開力矩更小且更穩定。同時,方案2在多模塊桁架機構中更有利于后續模塊的展開,傳力路徑更短。
2.2 動力源參數優化設計
由于機構存在死點,如果展開過程中出現故障導致在死點附近機構速度很小,電機的驅動力矩可能不足以保證機構穿越死點。為保證系統展開可靠度更高,避開機構運動接近死點時引起的力矩峰值,在機構折鉸處1、2、3、4、5布置無源儲能彈簧,力矩值分別為1、2、3、4、5,作為輔助動力源。
基于以上動力源布局設計,在不考慮機構摩擦力和系統阻力矩的情況下,建立簡化的雙模塊桁架機構剛體動力學虛擬樣機,并對動力源進行參數化:
1,2={t,t,t,t,t} (1)
式中:T為電機M的展開力矩,=1,2;t=0+kθ,0為初始力矩,k為彈簧剛度,為轉角,=1, 2, 3, 4, 5。
以折鉸1處無源儲能彈簧為例,利用2.1節建立的動力學仿真模型,對1進行參數化迭代優化設計。仿真結果如圖4所示,圖中曲線分別代表1為1 N、1.5 N、2 N、2.5 N和3 N時電機制動力矩的變化。從圖中可以看出,隨著1的增大,1制動力矩明顯遞增,2制動力在展開后期呈小幅遞增。這說明1處無源彈簧儲能力矩1的取值變化對M1影響較大,對M2影響稍小。在電機M1輸出力矩過大時,可以通過增大1處無源彈簧儲能力矩來降低對電機輸出力矩的需求。
以兩處電機制動力矩最佳值為優化目標,以無源儲能彈簧力矩值為設計變量,進行最優化設計,可得到5處無源儲能彈簧的理想力矩值,該值可作為儲能彈簧工程設計理論推薦值。
2.3 仿真分析驗證
鑒于可展開機構為空間大型桁架桿,桿件結構柔性在展開過程中對動力學特性的影響較大,為提高仿真精度需要建立整個機構的柔體動力學模型[14]。采用動力源優化設計結果,建立雙模塊桁架機構的全柔體動力學模型如圖5所示。為準確模擬可展開桁架鉸接觸的受力情況,仿真采用接觸碰撞模型和平面約束副對桁架鉸接處進行計算。鉸接觸處的法向接觸力和切向接觸力分別采用接觸碰撞模型中非線性彈簧阻尼模型和庫侖摩擦模型,具體為:
F=μF(3)

在該柔體動力學模型中,桿件與天線板均采用有限元模型,在有限元軟件中計算了桿件和天線板的36階模態,去除前6階剛體模態后將中性文件導入ADAMS中,ADAMS/FLEX采用修正的Craig-Bampton方法,以模態展開法描述天線模塊的柔性變形。
為避免梁單元尺度上的簡化而帶來仿真不準確,采用啞物體模擬尺寸干涉處的碰撞和接觸,這同時也減少了計算量。鉸接處彈簧剛度和初始力矩采用工程階段實際測試值,桿間鎖緊力、桿與天線板間碰撞力、兩天線板之間的阻力矩和天線板與星體間的阻力矩均采用同類產品工程經驗值。
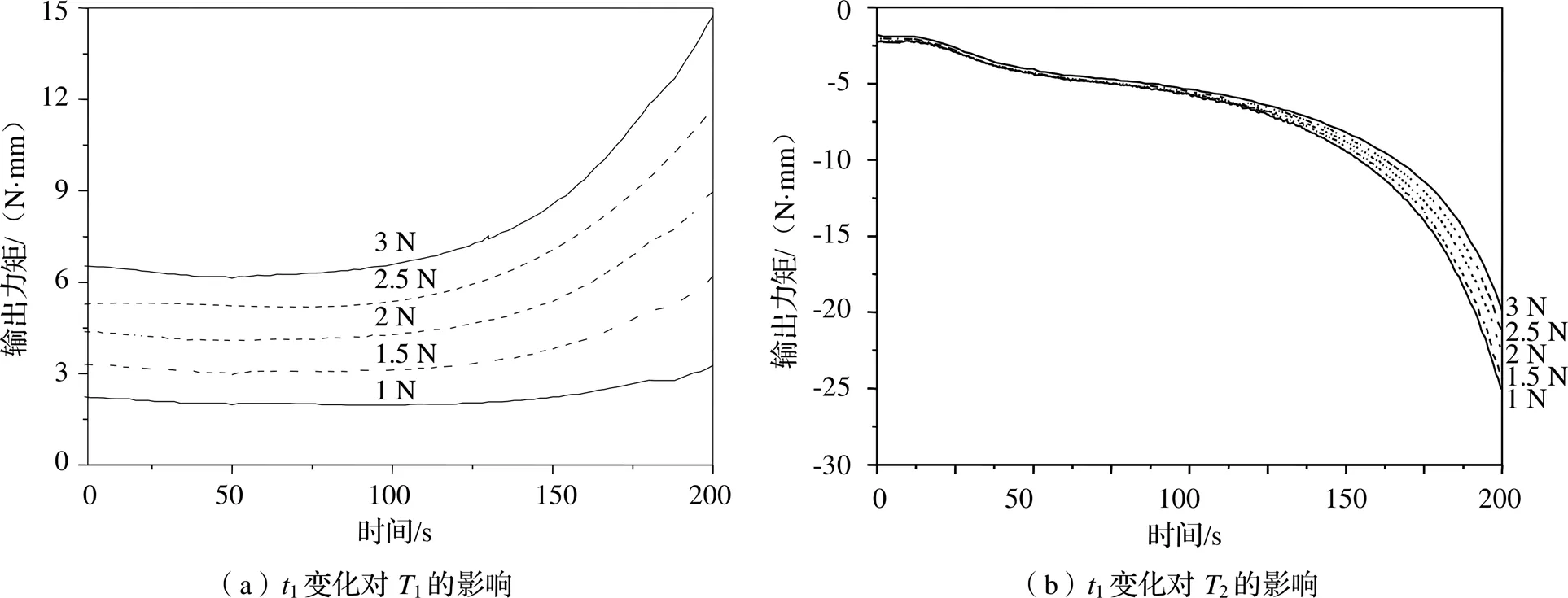
圖4 a1處無源儲能彈簧對機構電機輸出力矩的影響分析

圖5 雙模塊桁架機構全柔體動力學模型
對雙模塊桁架機構進行全柔體動力學仿真,可得到動力學參數如圖6所示。仿真時間為250 s,M1和M2電機分別進行精確的速度控制,角速度分別按靜止段、加速段和勻速段三部分來模擬機構在多個力元作用下的平衡狀態和加速、勻速展開狀態。圖中正負號表示力矩方向,幅值表示驅動力矩大小。仿真結果表明,機構能順利展開,除在鎖定處有較大沖擊外,展開過程中電機輸出力矩平穩。
2.4 分析結果
本節進行了多模塊桁架機構的動力源布局設計,并通過多方案比較確定了有源動力源的布置;以有源動力源輸出力矩需求最小為目標,對無源動力源進行了參數化,并進行了迭代優化設計。最終,建立仿真度較高的全柔體動力學模型對動力源的優化設計結果進行仿真分析,驗證了動力源的設計方案可行,其對驅動力矩的需求較小且機構展開過程穩定。
3 總結與展望
模塊化桁架機構動力源的設計需綜合考慮單模塊機構特性與多模塊組合運動特性間的關系,本文針對一種模塊化空間桁架機構提出了動力源設計方法,并建立動力學虛擬樣機針對有源動力源的布局和無源動力源的取值進行了優化設計,最后通過全柔體仿真分析方法驗證了動力源設計的可行性并得到了對系統驅動力矩的最小需求。該設計方法同樣可應用于其他模塊化展開機構[15-17]。
模塊化桁架機構是未來大型SAR天線展開機構的發展方向之一,其動力源系統設計需要在方案階段充分進行設計和匹配性優化。本文所采用的虛擬樣機技術與傳統的試驗技術是成本較低的一種途徑,但由于諸多樣機參數(如摩擦系數、阻力矩、桿件剛度、連接件剛度)采用的經驗值/設計值與實際有一定的差別,會導致動力源參數的優化設計結果不是系統最優值,最終桁架機構的產品動力源系統需通過展開試驗進一步調試。建議后續模塊化桁架機構動力源的設計優化可聯合采用動力學虛擬樣機仿真技術和半物理仿真技術。在動力學虛擬樣機仿真確定動力源設計方案之后,基于半物理仿真技術進行多動力源布局及參數取值的匹配性優化方案驗證,可進一步提高優化設計結果的可行性和準確度[18]。
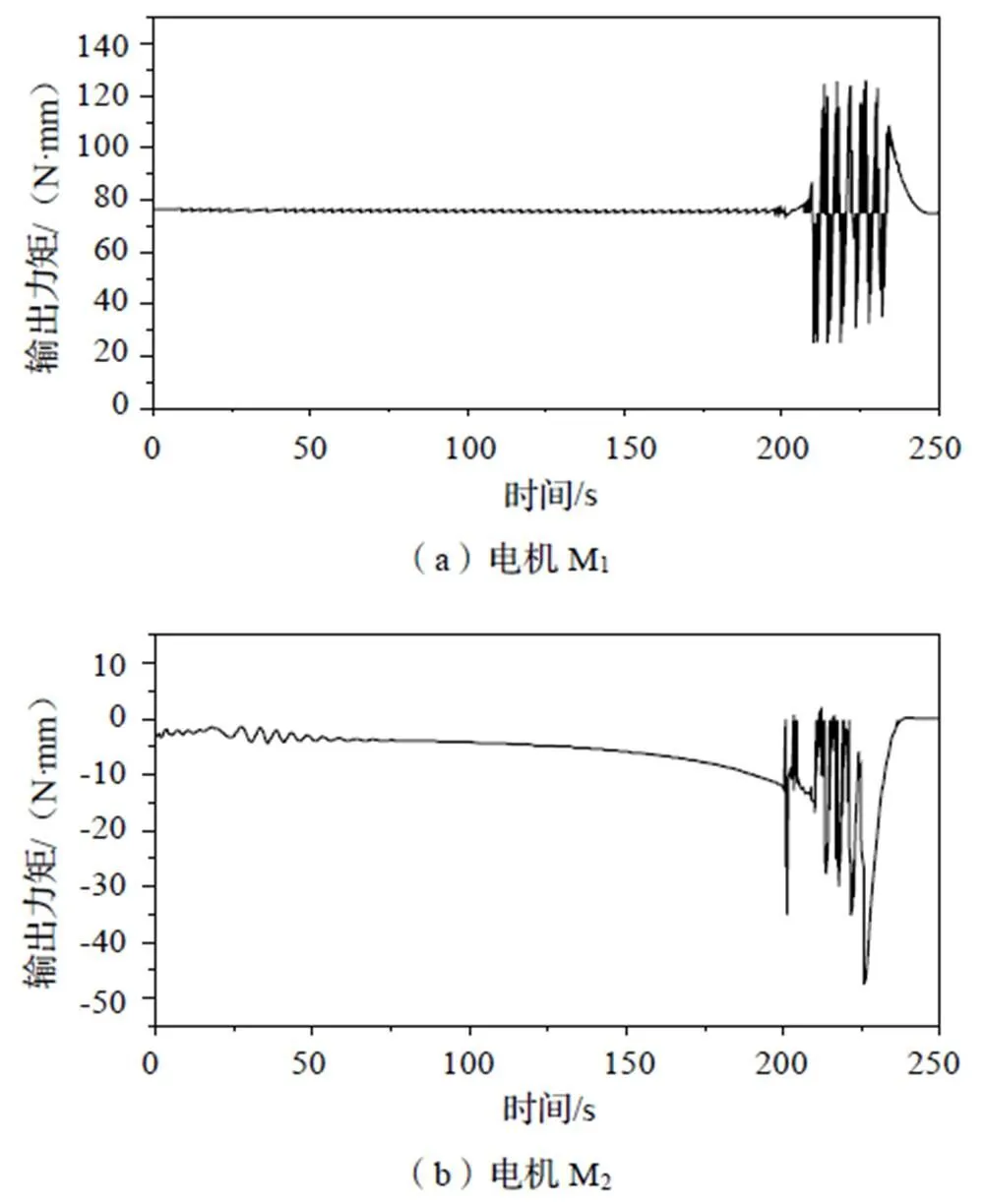
圖6 雙模塊桁架機構全柔性動力學仿真分析結果
[1]Schussler H,Wagner R. Features and technologies of ERS-1 (ESA) and X-SAR antennas[R]. NASA,1987:125-129.
[2]Chamberlain N,Amaro L,Oakes E,et al. Microstrip patch antenna panel for large aperture L-band phased array[C]. 2005 IEEE Aerospace Conference. Big Sky,MT,2005:1-8.
[3]耿旭樸,薛思涵. 合成孔徑雷達星座發展綜述[J]. 地理信息世界,2017,24(4):58-63.
[4]于登云,楊建中,航天器機構技術[M]. 北京:中國科學技術出版社,2011.
[5]于登云,孫京,馬興瑞. 大型構件伸展與鎖(壓)緊釋放技術[J]. 航天器工程,2007,16(1):23-27.
[6]何宏滿. 可展開結構關節特性分析[D]. 西安:西安電子科技大學,2012.
[7]劉榮強,金光,劉兆晶,等. 多模塊可展機構運動學分析及驅動設計[J]. 紅外與激光工程,2014,43(S):65-71.
[8]車明奎. 平面廣義可展開機構性能分析與集成優化[D]. 西安:西安電子科技大學,2017.
[9]張朝. 大型曲面可展開機構的多模塊聯動與超冗余約束優化研究[D]. 哈爾濱:哈爾濱工業大學,2017.
[10]郭宏偉,王建東,劉榮強,等. 固面天線可展開機構設計及動力學分析[J]. 哈爾濱工業大學學報,2019,51(7):1-8.
[11]王興澤,徐燕菱,林秋紅,等. 基于敏度分析的可展開桁架剛度優化設計[J]. 航天器工程,2017,26(6):75-79.
[12]劉榮強,田大可,鄧宗全,等. 多模塊構架式空間可展開天線背架的模態分析[J]. 北京理工大學學報,2011,31(6):685-690.
[13]楊東亞,王生澤,謝小正,等. 應用MATLAB分析模塊化機構運動[J]. 現代制造工程,2006(2):84-85.
[14]Xu Y,Lin Q,Wang X,et al. Mechanism design and dynamic analysis of a large-scale spatial deployable structure for space mission[C]. Seventh International Conference on Electronics and Information Engineering. Nanjing:Southeast University,2016.
[15]黃海林. 鉸接式可折展機構的單元構型綜合及大尺度組網研究[D]. 哈爾濱:哈爾濱工業大學,2012.
[16]田大可. 模塊化空間可展開天線支撐桁架設計與實驗研究[D]. 哈爾濱:哈爾濱工業大學,2011.
[17]冉江南,韓佩彤,曹子振,等. 薄壁管狀空間伸展臂技術綜述[J]. 機械 2019,46(10):44-51.
[18]延皓,葉正茂,叢大成,等. 空間對接半物理仿真原型試驗系統[J]. 機械工程學報,2007,43(9):51-56.
Optimization Design of the Power Source for Modular Truss Mechanism
LI Zhiyong1,LIN Qiuhong2,PEN Hongmin1,CAO Zizhen1
(1.Tianjin Institute of Aerospace Mechanical and Electrical Equipment, Tianjin 300458, China; 2.Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
Power source system of modular truss mechanism needs to be optimized in application for catering its multi-degree of freedom, minimalist principle, scalability, and space environment requirements. In this paper, the design process and optimization method of power source for a modular deployable truss mechanism with multi-degree of freedom is introduced. Based on dynamic virtual prototype technique, the optimization design of active power source and passive power source for acquiring matched parameters is performed. The results show that proposed method can improve the deployable dynamic characteristics and stability of modular mechanism and reduce the power demand of active power source.
modular;deployable mechanism;dynamics simulation;power source
V211.3
A
10.3969/j.issn.1006-0316.2022.02.008
1006-0316 (2022) 02-0054-07
2021-05-06
國家重點研發計劃(2020YFB2007600)
李志勇(1977-),男,山西太谷人,技師,主要研究方向為航天器集成裝配技術,E-mail:446154426@qq.com。*通訊作者:盆洪民(1980-),男,黑龍江海倫人,博士,研究員,主要研究方向為精密機械設計與制造、超精密加工與微納制造,E-mail:hmpen23@126.com。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年7期)2020-07-27 01:27:42
現代裝飾(2020年5期)2020-05-30 13:01:56
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中國核電(2017年2期)2017-08-11 08:00:56
海峽姐妹(2017年7期)2017-07-31 19:08:17
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50